Mach vi dieu khien arduino va ung dung
ŌĆó
2 likesŌĆó1,054 views

M├┤ tß║Ż t├¼m hiß╗āu vß╗ü bß╗Ö vi ─æiß╗üu khiß╗ān n├│i chung v├Ā Arduino n├│i ri├¬ng, c├Īch thß╗®c ß╗®ng dß╗źng chß║┐ tß║Īo xe ─æiß╗üu khiß╗ān, xe tß╗▒ h├Ānh

















![21/29
T├Āi liß╗ću tham khß║Żo
[1] Michael McRoberts (2010), Beginning Arduino
[2] Michael Margolis (2010), Arduino cookbook
[3] John-David Warren, Josh Adams, Harald Molle. (2012),
Arduino-Robotics
[4] https://www.arduino.cc/
[5] http://arduino.vn/reference
[6] https://vi.wikipedia.org/wiki/Arduino.
[7] http://fritzing.org](https://image.slidesharecdn.com/machvidieukhienarduinovaungdung-180528015722/85/Mach-vi-dieu-khien-arduino-va-ung-dung-21-320.jpg)
Mach vi dieu khien arduino va ung dung
- 1. 1/29 Huß║┐, 05-2018 NGHI├ŖN Cß╗©U, CHß║Š Tß║ĀO ROBOT Bß║░NG Mß║ĀCH ─ÉIß╗ĆU KHIß╗éN LOGIC Lß║¼P TR├īNH ─ÉŲ»ß╗óC ß╗”Y BAN NH├éN D├éN Tß╗łNH THß╗¬A THI├ŖN HUß║Š TRŲ»ß╗£NG CAO ─Éß║▓NG SŲ» PHß║ĀM ---’éÖ’Ć”’éś--- ─Éß╗ü t├Āi: Chß╗¦ nhiß╗ćm ─æß╗ü t├Āi Th├Ānh vi├¬n tham gia Th.S L├Ŗ GIA H├ÆA Th.S NGUYß╗äN TH├ĆNH C├öNG MS: 416030318
- 2. Nß╗śI DUNG Mß╗¤ ─æß║¦u Mß║Īch ─æiß╗üu khiß╗ān logic lß║Łp tr├¼nh ─æŲ░ß╗Żc Nghi├¬n cß╗®u chß║┐ tß║Īo robot Kß║┐t quß║Ż v├Ā hŲ░ß╗øng ph├Īt triß╗ān 1 2 4 3
- 3. ’üČ L├Į do chß╗Źn ─æß╗ü t├Āi ŌĆō Nghi├¬n cß╗®u l─®nh vß╗▒c ŌĆ£CM C├┤ng nghiß╗ćp 4.0ŌĆØ ─æß╗ā thay ─æß╗Ģi chŲ░ŲĪng tr├¼nh v├Ā nß╗Öi dung ─æ├Āo tß║Īo ŌĆó Internet of things (IoT) ŌĆó Robotic ŌĆō Bß║Żn th├ón ─æ├Ż c├│ nghi├¬n cß╗®u trŲ░ß╗øc, nghi├¬n cß╗®u n├óng cao ─æß╗ā ├Īp dß╗źng trong c├┤ng viß╗ćc ’üČ PhŲ░ŲĪng ph├Īp nghi├¬n cß╗®u ŌĆō T├¼m hiß╗āu mß║Īch PLC, Arduino Uno v├Ā thiß║┐t bß╗ŗ ngoß║Īi vi ŌĆō Kß║┐t hß╗Żp c├Īc kß╗╣ thuß║Łt nhŲ░: ŌĆó PhŲ░ŲĪng ph├Īp ─æiß╗üu xung PWM ŌĆó PhŲ░ŲĪng ph├Īp ─æß║Żo chiß╗üu ─æß╗Öng cŲĪ (mß║Īch cß║¦u H) ŌĆó PhŲ░ŲĪng ph├Īp ─æiß╗üu khiß╗ān bß║▒ng s├│ng v├┤ tuyß║┐n ŌĆó PhŲ░ŲĪng ph├Īp ─æo khoß║Żng c├Īch d├╣ng cß║Żm biß║┐n si├¬u ├óm ŌĆó ŌĆ”. - Nghi├¬n cß╗®u c├Īc h├¼nh mß║½u ─æß╗ā giß║Żi quyß║┐t nhu cß║¦u Mß╗¤ ─æß║¦u
- 4. 4/29 Mß║Īch ─æiß╗üu khiß╗ān logic lß║Łp tr├¼nh ─æŲ░ß╗Żc (PLC) ’üČ L├Ā mß╗Öt m├Īy vi t├Łnh nhß╗Å chß╗®a tß║źt cß║Ż tr├¬n 1 chip (SoC) Chß╗®a ─æß╗▒ng vi xß╗Ł l├Į, bß╗Ö nhß╗ø v├Ā ng├Ą v├Āo, ng├Ą ra ’üČ Giao tiß║┐p b├¬n ngo├Āi qia cß╗Ģng nß╗æi tiß║┐p, ADC, DAC, Bluetooth, Wi-Fi ŌĆ” ’üČ Lß║Łp tr├¼nh ─æŲ░ß╗Żc ’üČ C├│ chi ph├Ł nhß╗Å v├Ā gi├Ī thß║źp ’üČ Th├┤ng thŲ░ß╗Øng ─æŲ░ß╗Żc nh├║ng b├¬n trong thiß║┐t bß╗ŗ ─æß╗ā kiß╗ām so├Īt
- 5. 5/29 Bß╗Ö vi ─æiß╗üu khiß╗ān ’üČ M├Īy t├Łnh chß╗ē tr├¬n 1 chip t├Łch hß╗Żp Processor (CPU) Memory (RAM / ROM / Flash) I/O ports (USB, I2C, SPI, ADC) ’üČ C├Īc hß╗Ź microcontroller th├┤ng dß╗źng Intel: 4004, 8008 v.v.. Atmel: AT v├Ā AVR Microchip: PIC ARM: nhiß╗üu h├Żng sß║Żn xuß║źt ’üČ ß╗©ng dß╗źng ─Éiß╗ćn thoß║Īi di ─æß╗Öng ─Éß╗ō chŲĪi Thiß║┐t bß╗ŗ gia dß╗źng Xe hŲĪi M├Īy ß║Żnh, m├Īy quay phim ŌĆ”
- 6. 6/29 Arduino => Bß╗Ö vi ─æiß╗üu khiß╗ān ’üČ Nß╗ün tß║Żng phß║¦n cß╗®ng mß╗¤ ’üČ M├┤i trŲ░ß╗Øng nß╗ün tß║Żng m├Ż nguß╗ōn mß╗¤ Dß╗ģ d├Āng hß╗Źc ng├┤n ngß╗» v├Ā thŲ░ viß╗ćn M├┤i trŲ░ß╗Øng phß║¦n mß╗üm ph├Īt triß╗ān t├Łch hß╗Żp Chß║Īy tr├¬n nß╗ün tß║Żng Windows / Mac / Linux ’üČ C├│ thß╗ā lß║Łp tr├¼nh cho bß╗Ö vi ─æiß╗üu khiß╗ān ─æß╗ā ─æk thiß║┐t bß╗ŗ cŲĪ ─æiß╗ćn ŌĆ” ’üČ C├│ thß╗ā kß║┐t nß╗æi t├Łn hiß╗ću kß╗╣ thuß║Łt sß╗æ v├Ā tŲ░ŲĪng tß╗▒ Cß║Żm biß║┐n (contac, si├¬u ├óm, ─æß╗Ö ß║®m, ├Īnh s├ĪngŌĆ”) Thiß║┐t bß╗ŗ truyß╗ün ─æß╗Öng (Motor 1 chiß╗üu, motor servo, motor bŲ░ß╗øcŌĆ”) ’üČ L├Į do chß╗Źn mß║Īch Arduino Uno C├│ nß╗ün tß║Żng dß╗ģ d├╣ng Dß╗ģ lß║Łp tr├¼nh (Arduino C l├Ā phi├¬n bß║Żn r├║t gß╗Źn cß╗¦a C++) Giao tiß║┐p chuß║®n USB Hß╗Ś trß╗Ż nhiß╗üu bß║Żng mß║Īch thiß║┐t bß╗ŗ ngoß║Īi vi Gi├Ī rß║╗
- 7. 7/29 Arduino - Uno ’üČ ─Éß║Ęc t├Łnh vß╗ü ─æiß╗ćn cß╗¦a c├Īc ng├Ą v├Āo ra ─Éiß╗ćn ├Īp sß╗Ł dß╗źng: 7-12 V (USB, DC plug, or Vin) D├▓ng xuß║źt cß╗▒c ─æß║Īi cho 1 ch├ón: 40 mA ’üČ C├Īc cß╗Ģng I/O 14 Digital I/O bits ŌĆó 2 = serial TxD/RxD 4 LEDs 6 ng├Ą ra ŌĆ£AnalogŌĆØ ŌĆó ─Éiß╗üu chß║┐ pulse-width ŌĆó C├│ thß╗ā chß╗Źn digital hoß║Ęc PWM ŌĆó Giß║Żi ph├Īp 8-bit 6 ng├Ą v├Āo Analog ŌĆó Giß║Żi ph├Īp l├¬n ─æß║┐n 10-bit
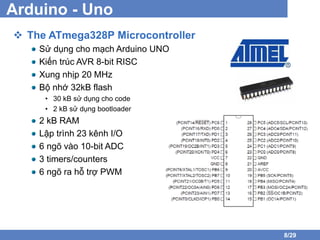
- 8. 8/29 Arduino - Uno ’üČ The ATmega328P Microcontroller Sß╗Ł dß╗źng cho mß║Īch Arduino UNO Kiß║┐n tr├║c AVR 8-bit RISC Xung nhß╗ŗp 20 MHz Bß╗Ö nhß╗ø 32kB flash ŌĆó 30 kB sß╗Ł dß╗źng cho code ŌĆó 2 kB sß╗Ł dß╗źng bootloader 2 kB RAM Lß║Łp tr├¼nh 23 k├¬nh I/O 6 ng├Ą v├Āo 10-bit ADC 3 timers/counters 6 ng├Ą ra hß╗Ś trß╗Ż PWM
- 9. 9/29 Giao diß╗ćn chŲ░ŲĪng tr├¼nh Includes Globals void setup() void loop()
- 10. 10/29 C├Īc sß║Żn phß║®m Arduino ’üČ C├│ nhiß╗üu phi├¬n bß║Żn kh├Īc nhau t├╣y thuß╗Öc: Sß╗æ k├¬nh I/O K├Łch thŲ░ß╗øc Vi xß╗Ł l├Į ’üČ Uno ’üČ Leonardo ’üČ Due ’üČ Micro / Mini / Nano ’üČ LilyPad ’üČ Esplora ’üČ Mega
- 11. 11/29 C├Īc bß║Żng mß║Īch gß║»n th├¬m (Shields) <Color LCD shield><GPS shield> <Bluetooth module>
- 12. 12/29 C├Īc cß║Żm biß║┐n gß║»n th├¬m (Sensors) <Gas > <─Éß╗Ö ß║®m v├Ā nhiß╗ćt ─æß╗Ö> <Qu├®t v├ón tay> <─Éo ph├│ng xß║Ī>
- 13. 13/29 Nghi├¬n cß╗®u chß║┐ tß║Īo robot ’üČ Robot l├Ā mß╗Öt loß║Īi m├Īy c├│ thß╗ā thß╗▒c hiß╗ćn nhß╗»ng c├┤ng viß╗ćc mß╗Öt c├Īch tß╗▒ ─æß╗Öng bß║▒ng sß╗▒ ─æiß╗üu khiß╗ān cß╗¦a m├Īy t├Łnh hoß║Ęc c├Īc mß║Īch PLC. ’üČ Ph├ón loß║Īi Robot theo thß║┐ hß╗ć ’ā╝ Robot hoß║Īt ─æß╗Öng nhß╗Ø ngŲ░ß╗Øi ─æiß╗üu khiß╗ān trß╗▒c tiß║┐p ’ā╝ Robot hoß║Īt ─æß╗Öng theo chu tr├¼nh cß╗æ ─æß╗ŗnh.- robot lß║»p ─æß║Ęt. ’ā╝ Robot hoß║Īt ─æß╗Öng theo chu tr├¼nh thay ─æß╗Ģi ─æŲ░ß╗Żc. ’ā╝ Robot ─æiß╗üu khiß╗ān bß║▒ng chŲ░ŲĪng tr├¼nh sß╗æ. ’ā╝ Robot th├┤ng minh ’üČ C├Īc bŲ░ß╗øc ch├Łnh ─æß╗ā x├óy dß╗▒ng robot trong ─æß╗ü t├Āi ’ā╝ Thiß║┐t kß║┐ hß╗ć thß╗æng cŲĪ kh├Ł, hß╗ć thß╗æng ─æiß╗ćn ─æß╗ā truyß╗ün ─æß╗Öng ’ā╝ Thiß║┐t kß║┐ cŲĪ chß║┐ nhß║Łn lß╗ćnh: ─æiß╗üu khiß╗ān trß╗▒c tiß║┐p, th├┤ng minh ’ā╝ Lß║Łp tr├¼nh ’ā╝ Hiß╗ću chß╗ēnh
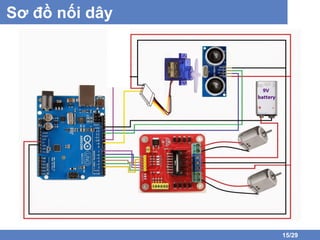
- 14. 14/29 Nghi├¬n cß╗®u chß║┐ tß║Īo robot ’üČ Linh kiß╗ćn cß║¦n thiß║┐t
- 15. 15/29 SŲĪ ─æß╗ō nß╗æi ╗Õ├ó▓Ō
- 16. 16/29 Nghi├¬n cß╗®u chß║┐ tß║Īo robot ’üČ Xe 4 b├Īnh ─æiß╗üu khiß╗ān qua bluetooth /
- 17. 17/29 Nghi├¬n cß╗®u chß║┐ tß║Īo robot ’üČ Xe 3 b├Īnh tß╗▒ h├Ānh tr├Īnh vß║Łt cß║Żn 1 cß║Żm biß║┐n xoay /
- 18. 18/29 Xe 3 b├Īnh tß╗▒ h├Ānh tr├Īnh vß║Łt cß║Żn 1 cß║Żm biß║┐n
- 19. 19/29 Xe 3 b├Īnh tß╗▒ h├Ānh tr├Īnh vß║Łt cß║Żn 1 cß║Żm biß║┐n xoay
- 20. 20/29 Kß║┐t luß║Łn v├Ā hŲ░ß╗øng ph├Īt triß╗ān ’üČ ─Éß╗ü t├Āi ─æ├Ż ─æß║Īt ─æŲ░ß╗Żc mß╗Öt sß╗æ kß║┐t quß║Ż sau: Nghi├¬n cß╗®u mß║Īch PLC, Arduino Uno bao gß╗ōm kiß║┐n tr├║c phß║¦n cß╗®ng v├Ā ng├┤n ngß╗» lß║Łp tr├¼nh cß╗¦a n├│. Nghi├¬n cß╗®u thiß║┐t bß╗ŗ gh├®p nß╗æi vß╗øi mß║Īch Arduino Uno bao gß╗ōm: DC motor, Servo motor, Cß║Żm biß║┐n si├¬u ├óm, Bluetooth, mß║Īch ─æiß╗üu khiß╗ān ─æß╗Öng cŲĪ L298, L293D. Nghi├¬n cß╗®u l├Į thuyß║┐t vß╗ü robot, ─æ├Ż x├óy dß╗▒ng robot l├Ā xe ─æiß╗üu khiß╗ān th├┤ng qua bluetooth v├Ā xe tß╗▒ h├Ānh tr├Īnh vß║Łt cß║Żn sß╗Ł dß╗źng vi ─æiß╗üu khiß╗ān Arduino Uno. Tr├¬n cŲĪ sß╗¤ mß║Īch Arduino c├│ thß╗ā triß╗ān khai 1 hß╗ć thß╗æng mß╗øi ’üČ HŲ░ß╗øng ph├Īt triß╗ān tiß║┐p theo cß╗¦a ─æß╗ü t├Āi: Nghi├¬n cß╗®u v├Ā lß║Łp tr├¼nh module Arduino ESP8266 bß║▒ng Arduino IDE, sß╗Ł dß╗źng theo hŲ░ß╗øng IoT. Nghi├¬n cß╗®u th├¬m c├Īc kß╗╣ thuß║Łt lß║Łp tr├¼nh. Nghi├¬n cß╗®u th├¬m c├Īc thiß║┐t bß╗ŗ cß║Żm biß║┐n, thiß║┐t bß╗ŗ ngoß║Īi vi kh├Īc m├Ā ─æß╗ü t├Āi chŲ░a sß╗Ł dß╗źng.
- 21. 21/29 T├Āi liß╗ću tham khß║Żo [1] Michael McRoberts (2010), Beginning Arduino [2] Michael Margolis (2010), Arduino cookbook [3] John-David Warren, Josh Adams, Harald Molle. (2012), Arduino-Robotics [4] https://www.arduino.cc/ [5] http://arduino.vn/reference [6] https://vi.wikipedia.org/wiki/Arduino. [7] http://fritzing.org