
1 of 100
Downloaded 183 times


Ad
Recommended
Sistema di numerazione
Sistema di numerazioneGilda Tobia
╠²
Il documento descrive diversi sistemi di numerazione, tra cui decimale, binario, e altre basi fino a 16. Viene spiegato come convertire numeri tra diverse basi e come eseguire operazioni aritmetiche di base in ciascun sistema numerico. Inoltre, sono forniti esempi pratici di conversione e operazioni come somma, sottrazione, moltiplicazione e divisione nel sistema binario.Assembly2
Assembly2Mariangela Mone
╠²
Il documento tratta della gestione dei ritardi in microcontrollori utilizzando un generatore di onde quadre e istruzioni di ritardo come 'nop'. Viene fornito un esempio di programma in assembly per il PIC16F628 che utilizza registri e subroutine per creare ritardi e gestire l'accensione e lo spegnimento di LED. Si discute anche la configurazione del timer e delle interruzioni, incluso l'uso di un prescaler per modificare la frequenza dell'interrupt.Tesi Triennale
Tesi TriennaleMirko Mancin
╠²
Il documento presenta la tesi di laurea di Mirko Mancin riguardante la progettazione e realizzazione di un sistema di ambient intelligence basato su Arduino e Android. Il sistema utilizza tecnologie open source e hardware per monitorare grandezze fisiche ambientali e interagire con gli utenti tramite un'app mobile. I risultati mostrano che il sistema pu├▓ anticipare i bisogni degli utenti attraverso l'apprendimento automatico.Bk001 it c18-step_by_step
Bk001 it c18-step_by_stephawk2012
╠²
La seconda edizione di 'C18 Step by Step' di Mauro Laurenti aggiorna il precedente manuale sulla programmazione dei microcontrollori PIC 18, introducendo nuovi capitoli per supportare lettori meno esperti. Il testo ├© disponibile sotto licenza GNU e include istruzioni per l'uso di una scheda di sviluppo progettata specificamente per esperienze didattiche, con particolare attenzione alla programmazione in C. L'autore avverte riguardo alla responsabilit├Ā nell'uso delle informazioni e dipendenti dalla corretta osservanza delle normative di sicurezza.Tesi Magistrale 2014
Tesi Magistrale 2014Mirko Mancin
╠²
Il documento descrive la progettazione e lo sviluppo di un gateway per la gestione efficiente di servizi e risorse nell'Internet of Things, utilizzando tecniche di cloud computing. Viene presentata un'architettura scalabile e performante che consente la virtualizzazione degli hub locali, facilitando l'accesso remoto e l'interoperabilit├Ā tra dispositivi. Sono anche delineati obiettivi futuri come l'integrazione in testbed reali e l'implementazione di livelli di sicurezza avanzati.Diagrammi di Bode
Diagrammi di BodeMariangela Mone
╠²
Il documento discute i diagrammi di Bode, che includono ampiezze e fasi, ed ├© caratterizzato da rappresentazioni asintotiche su scale semilogaritmiche. Viene spiegato come tracciare i diagrammi a partire dalla fattorizzazione della funzione di trasferimento, con dettagli su guadagni e frequenze di taglio. Infine, si evidenziano i vantaggi della rappresentazione logaritmica in termini di semplicit├Ā e scalabilit├Ā delle funzioni analizzate.Investimenti
InvestimentiSergio Porcu
╠²
Il documento analizza due investimenti per la Noplastic S.p.A. e la societ├Ā Alfa, confrontando impianti diversi in base al valore attuale netto (VAN) e al periodo di recupero (pay back period). I risultati mostrano che l'investimento x risulta pi├╣ conveniente rispetto all'investimento y, sia per Noplastic che per Alfa, considerando anche variazioni nel costo del capitale. Infine, si esamina anche un caso di investimento per Aasspp S.r.l., dove l'investimento b si dimostra superiori rispetto all'investimento a.Diagnosi e integrazione disabili in Polonia
Diagnosi e integrazione disabili in PoloniaGilda Tobia
╠²
Il documento discute le strategie per migliorare la qualit├Ā del supporto educativo agli studenti con bisogni educativi speciali in Polonia. Si evidenziano diversi gruppi di studenti con disabilit├Ā e le forme di assistenza educativa disponibili, comprese le diagnosi e i piani d'azione per il supporto. Inoltre, si sottolinea l'importanza della cooperazione tra insegnanti, specialisti e genitori nel facilitare lo sviluppo psico-pedagogico di questi studenti.Interfaccia verso il BUS
Interfaccia verso il BUSSergio Porcu
╠²
Il documento descrive l'interfaccia dei sistemi a microprocessore verso il bus, evidenziando i cicli di comunicazione e i segnali di stato e controllo coinvolti nei processi di lettura e scrittura. Viene spiegata la gestione dei cicli di idle e di wait, oltre ai segnali di interrupt e la loro significanza nelle operazioni. Viene fornita una panoramica dettagliata dei segnali di stato, controlli e come questi influenzano il trasferimento di dati nel sistema.Assembly
AssemblyMariangela Mone
╠²
Il documento fornisce un'introduzione alla programmazione dei microcontrollori PIC, spiegando la struttura dei registri e il linguaggio assembly. Viene descritta l'importanza del registro W come accumulatore, e fornite istruzioni chiave per operazioni logiche e aritmetiche. Il contenuto include anche esempi pratici di programmazione e l'uso delle porte di input/output nei PIC.Microprocessori INTEL 8086/8088
Microprocessori INTEL 8086/8088Sergio Porcu
╠²
Il documento analizza l'architettura dei microprocessori Intel 8086/8088, evidenziando le loro caratteristiche tecniche come i bus di indirizzo e dati. Viene trattata la compatibilit├Ā con le versioni successive e la struttura dei registri, inclusi i registri di segmento e di stato. Si discute anche il funzionamento delle unit├Ā di esecuzione e interfaccia del bus, nonch├® la gestione della memoria e delle operazioni di I/O.Lezione 4 arduino - corso 20 ore
Lezione 4 arduino - corso 20 oreMirko Mancin
╠²
Il documento esamina diversi sensori utilizzabili con Arduino, inclusi FSR, fotoresistenze, sensori di temperatura, umidit├Ā e inclinazione. Ogni sensore ├© descritto con dettagli sulle loro caratteristiche, modalit├Ā di utilizzo e schemi di collegamento. Viene fornita anche una panoramica su come interfacciare questi sensori con Arduino e di come gestire carichi ad alta corrente.Assembly1
Assembly1Mariangela Mone
╠²
Il documento descrive la seconda parte di un programma per un encoder che utilizza un microcontrollore PIC 16F84, ampliando un progetto precedente per visualizzare numeri su un display a 7 segmenti. Viene spiegato come acquisire valori binari tramite i pin di input e come gestire registri speciali tra i due banchi di memoria del PIC. In aggiunta, si forniscono dettagli sulle operazioni di salto nel programma e sulla gestione del program counter.Formato istruzioni e direttive 8086
Formato istruzioni e direttive 8086Sergio Porcu
╠²
Il documento descrive il formato delle istruzioni e delle direttive per i sistemi a microprocessore 8086, evidenziando la struttura delle istruzioni, l'uso di nomi simbolici e costanti numeriche. Include dettagli sulle direttive per la gestione dei segmenti di memoria, la creazione di procedure e definizioni di dati. Vengono anche spiegati operatori e direttive che consentono di gestire variabili e simboli tra moduli.Array
ArrayMariangela Mone
╠²
Il documento fornisce una panoramica sugli array nei linguaggi di programmazione, definendoli come collezioni ordinate di oggetti dello stesso o differente tipo. Vengono presentati esempi di dichiarazione e utilizzo di array in linguaggi come C, C++, PHP, JavaScript e Arduino, evidenziando funzioni comuni come la visualizzazione e la manipolazione degli array. Inoltre, si discutono le diverse dimensioni degli array e le operazioni che possono essere eseguite su di essi, come il calcolo di medie e prodotti scalari.Assembler 8086
Assembler 8086Sergio Porcu
╠²
Il documento descrive le caratteristiche e le istruzioni fondamentali del microprocessore 8086, illustrando diverse modalit├Ā di indirizzamento e le operazioni principali supportate. Viene fornito un elenco dettagliato delle istruzioni aritmetiche, logiche, di confronto e di gestione dei flag, nonch├® delle operazioni sulle stringhe e delle istruzioni di salto. Inoltre, il documento presenta vari esempi di utilizzo di queste istruzioni nel contesto della programmazione in assembler.Esercizi in linguaggio Assembly 8086
Esercizi in linguaggio Assembly 8086Sergio Porcu
╠²
Il documento contiene una serie di programmi in assembler per microprocessori, scritti dall'autore Sergio Porcu, che trattano vari argomenti come la manipolazione di registri, operazioni aritmetiche, calcolo della distanza di Hamming, somma degli elementi di un vettore, e controllo della parit├Ā. Ogni programma ├© preceduto da commenti esplicativi e include codice sorgente per diverse operazioni, come sommare, sottrarre, e calcolare espressioni matematiche. La variet├Ā di esempi evidenzia diverse applicazioni pratiche di programmazione a basso livello.Arduino&Raspberry
Arduino&RaspberryMirko Mancin
╠²
Il documento esplora le piattaforme open hardware Arduino e Raspberry Pi, descrivendo le loro caratteristiche, come sono programmabili e le applicazioni pratiche. Arduino ├© una scheda economica per prototipazione elettronica, mentre Raspberry Pi ├© un mini computer versatile con capacit├Ā di programmazione in diversi linguaggi. Entrambi possono interagire tra loro in vari modi, espandendo ulteriormente le loro funzionalit├Ā in ambito educativo e progetti pratici.Storia di roma in 5 minuti
Storia di roma in 5 minutiPaolo Gallese
╠²
Il documento descrive un progetto scolastico in cui gli studenti devono creare un cartone animato di cinque minuti sulla storia di Roma utilizzando tecnologie semplici. L'obiettivo ├© incoraggiare la creativit├Ā, il lavoro di gruppo e l'apprendimento attraverso un approccio ludico e coinvolgente. Vengono delineati ruoli specifici per gli alunni e fasi di lavoro per garantire un'esperienza educativa efficace.Il pic 16 f84a
Il pic 16 f84aEmanuele Tonucci
╠²
Il microcontrollore PIC 16F84 ├© un dispositivo a microprocessore integrato che include CPU, memoria, e periferiche I/O, progettato secondo un'architettura Harvard. Con un set ridotto di istruzioni e una memoria flash programmabile, offre vari vantaggi in termini di velocit├Ā ed efficienza. Inoltre, dispone di funzioni avanzate come sleep mode, watchdog timer e gestione di interruzioni, rendendolo adatto per applicazioni embedded.OpenOffice.org - Come rendersi indipendenti da MS Office
OpenOffice.org - Come rendersi indipendenti da MS OfficeNicola Corti
╠²
Il documento presenta OpenOffice.org come un'alternativa gratuita e libera a Microsoft Office, fornendo informazioni su come scaricarlo, i requisiti minimi per l'installazione e la sua disponibilit├Ā in oltre 70 lingue. Descrive le funzionalit├Ā della suite, che include programmi come Writer, Calc, e Impress, simili a Word ed Excel, e sottolinea la libert├Ā d'uso e la facilit├Ā di condivisione del software. Infine, menziona la possibilit├Ā di esportare documenti in formato PDF e l'uso di plugin per espandere le funzionalit├Ā del programma.Il plc
Il plcGilda Tobia
╠²
Il documento descrive il funzionamento e l'utilizzo dei PLC (Programmable Logic Controllers) nelle applicazioni di automazione industriale. Vengono trattati argomenti come la logica cablata e programmata, la struttura del PLC, i linguaggi di programmazione e le caratteristiche necessarie per scrivere un programma efficace. Inoltre, viene evidenziata l'importanza della scelta del linguaggio in base a criteri funzionali, tecnologici ed economici.Il plc linguaggi program
Il plc linguaggi programGilda Tobia
╠²
Il documento tratta elementi e linguaggi di programmazione per PLC, descrivendo software, strutture logiche, e metodologie di programmazione come il linguaggio ladder e grafcet. Viene evidenziato il processo di programmazione, dall'assegnazione degli elementi alla validazione del programma, considerando anche criteri di scelta e installazione dei PLC. Inclusi sono standard normativi e requisiti di sicurezza, nonch├® dettagli sulla gestione e manutenzione dei PLC.Esercizi plc
Esercizi plcGilda Tobia
╠²
Il documento presenta esercizi relativi alla progettazione di circuiti per il controllo di motori mediante un PLC. Gli esercizi richiedono di disegnare schemi di comando per avviare e arrestare motori in diverse condizioni temporali e attraverso l'uso di fine corsa. Viene anche chiesto di riflettere sulle differenze tra i circuiti progettati e la scelta del sistema pi├╣ adatto per l'arresto automatico di un motore.Lezione 3 arduino - corso 20 ore
Lezione 3 arduino - corso 20 oreMirko Mancin
╠²
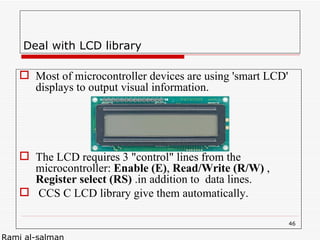
Il documento fornisce una guida su come utilizzare Arduino con diversi componenti, come display LCD, sensori e varie modalit├Ā di comunicazione (seriale, Ethernet, Wi-Fi, I2C). Vengono presentati esempi pratici di programmazione per la visualizzazione di dati e l'interazione con dispositivi mediante protocolli specifici. Inoltre, si esplorano varie shield e moduli Wi-Fi per creare comunicazioni wireless e reti ad hoc.More Related Content
Viewers also liked (17)
Interfaccia verso il BUS
Interfaccia verso il BUSSergio Porcu
╠²
Il documento descrive l'interfaccia dei sistemi a microprocessore verso il bus, evidenziando i cicli di comunicazione e i segnali di stato e controllo coinvolti nei processi di lettura e scrittura. Viene spiegata la gestione dei cicli di idle e di wait, oltre ai segnali di interrupt e la loro significanza nelle operazioni. Viene fornita una panoramica dettagliata dei segnali di stato, controlli e come questi influenzano il trasferimento di dati nel sistema.Assembly
AssemblyMariangela Mone
╠²
Il documento fornisce un'introduzione alla programmazione dei microcontrollori PIC, spiegando la struttura dei registri e il linguaggio assembly. Viene descritta l'importanza del registro W come accumulatore, e fornite istruzioni chiave per operazioni logiche e aritmetiche. Il contenuto include anche esempi pratici di programmazione e l'uso delle porte di input/output nei PIC.Microprocessori INTEL 8086/8088
Microprocessori INTEL 8086/8088Sergio Porcu
╠²
Il documento analizza l'architettura dei microprocessori Intel 8086/8088, evidenziando le loro caratteristiche tecniche come i bus di indirizzo e dati. Viene trattata la compatibilit├Ā con le versioni successive e la struttura dei registri, inclusi i registri di segmento e di stato. Si discute anche il funzionamento delle unit├Ā di esecuzione e interfaccia del bus, nonch├® la gestione della memoria e delle operazioni di I/O.Lezione 4 arduino - corso 20 ore
Lezione 4 arduino - corso 20 oreMirko Mancin
╠²
Il documento esamina diversi sensori utilizzabili con Arduino, inclusi FSR, fotoresistenze, sensori di temperatura, umidit├Ā e inclinazione. Ogni sensore ├© descritto con dettagli sulle loro caratteristiche, modalit├Ā di utilizzo e schemi di collegamento. Viene fornita anche una panoramica su come interfacciare questi sensori con Arduino e di come gestire carichi ad alta corrente.Assembly1
Assembly1Mariangela Mone
╠²
Il documento descrive la seconda parte di un programma per un encoder che utilizza un microcontrollore PIC 16F84, ampliando un progetto precedente per visualizzare numeri su un display a 7 segmenti. Viene spiegato come acquisire valori binari tramite i pin di input e come gestire registri speciali tra i due banchi di memoria del PIC. In aggiunta, si forniscono dettagli sulle operazioni di salto nel programma e sulla gestione del program counter.Formato istruzioni e direttive 8086
Formato istruzioni e direttive 8086Sergio Porcu
╠²
Il documento descrive il formato delle istruzioni e delle direttive per i sistemi a microprocessore 8086, evidenziando la struttura delle istruzioni, l'uso di nomi simbolici e costanti numeriche. Include dettagli sulle direttive per la gestione dei segmenti di memoria, la creazione di procedure e definizioni di dati. Vengono anche spiegati operatori e direttive che consentono di gestire variabili e simboli tra moduli.Array
ArrayMariangela Mone
╠²
Il documento fornisce una panoramica sugli array nei linguaggi di programmazione, definendoli come collezioni ordinate di oggetti dello stesso o differente tipo. Vengono presentati esempi di dichiarazione e utilizzo di array in linguaggi come C, C++, PHP, JavaScript e Arduino, evidenziando funzioni comuni come la visualizzazione e la manipolazione degli array. Inoltre, si discutono le diverse dimensioni degli array e le operazioni che possono essere eseguite su di essi, come il calcolo di medie e prodotti scalari.Assembler 8086
Assembler 8086Sergio Porcu
╠²
Il documento descrive le caratteristiche e le istruzioni fondamentali del microprocessore 8086, illustrando diverse modalit├Ā di indirizzamento e le operazioni principali supportate. Viene fornito un elenco dettagliato delle istruzioni aritmetiche, logiche, di confronto e di gestione dei flag, nonch├® delle operazioni sulle stringhe e delle istruzioni di salto. Inoltre, il documento presenta vari esempi di utilizzo di queste istruzioni nel contesto della programmazione in assembler.Esercizi in linguaggio Assembly 8086
Esercizi in linguaggio Assembly 8086Sergio Porcu
╠²
Il documento contiene una serie di programmi in assembler per microprocessori, scritti dall'autore Sergio Porcu, che trattano vari argomenti come la manipolazione di registri, operazioni aritmetiche, calcolo della distanza di Hamming, somma degli elementi di un vettore, e controllo della parit├Ā. Ogni programma ├© preceduto da commenti esplicativi e include codice sorgente per diverse operazioni, come sommare, sottrarre, e calcolare espressioni matematiche. La variet├Ā di esempi evidenzia diverse applicazioni pratiche di programmazione a basso livello.Arduino&Raspberry
Arduino&RaspberryMirko Mancin
╠²
Il documento esplora le piattaforme open hardware Arduino e Raspberry Pi, descrivendo le loro caratteristiche, come sono programmabili e le applicazioni pratiche. Arduino ├© una scheda economica per prototipazione elettronica, mentre Raspberry Pi ├© un mini computer versatile con capacit├Ā di programmazione in diversi linguaggi. Entrambi possono interagire tra loro in vari modi, espandendo ulteriormente le loro funzionalit├Ā in ambito educativo e progetti pratici.Storia di roma in 5 minuti
Storia di roma in 5 minutiPaolo Gallese
╠²
Il documento descrive un progetto scolastico in cui gli studenti devono creare un cartone animato di cinque minuti sulla storia di Roma utilizzando tecnologie semplici. L'obiettivo ├© incoraggiare la creativit├Ā, il lavoro di gruppo e l'apprendimento attraverso un approccio ludico e coinvolgente. Vengono delineati ruoli specifici per gli alunni e fasi di lavoro per garantire un'esperienza educativa efficace.Il pic 16 f84a
Il pic 16 f84aEmanuele Tonucci
╠²
Il microcontrollore PIC 16F84 ├© un dispositivo a microprocessore integrato che include CPU, memoria, e periferiche I/O, progettato secondo un'architettura Harvard. Con un set ridotto di istruzioni e una memoria flash programmabile, offre vari vantaggi in termini di velocit├Ā ed efficienza. Inoltre, dispone di funzioni avanzate come sleep mode, watchdog timer e gestione di interruzioni, rendendolo adatto per applicazioni embedded.OpenOffice.org - Come rendersi indipendenti da MS Office
OpenOffice.org - Come rendersi indipendenti da MS OfficeNicola Corti
╠²
Il documento presenta OpenOffice.org come un'alternativa gratuita e libera a Microsoft Office, fornendo informazioni su come scaricarlo, i requisiti minimi per l'installazione e la sua disponibilit├Ā in oltre 70 lingue. Descrive le funzionalit├Ā della suite, che include programmi come Writer, Calc, e Impress, simili a Word ed Excel, e sottolinea la libert├Ā d'uso e la facilit├Ā di condivisione del software. Infine, menziona la possibilit├Ā di esportare documenti in formato PDF e l'uso di plugin per espandere le funzionalit├Ā del programma.Il plc
Il plcGilda Tobia
╠²
Il documento descrive il funzionamento e l'utilizzo dei PLC (Programmable Logic Controllers) nelle applicazioni di automazione industriale. Vengono trattati argomenti come la logica cablata e programmata, la struttura del PLC, i linguaggi di programmazione e le caratteristiche necessarie per scrivere un programma efficace. Inoltre, viene evidenziata l'importanza della scelta del linguaggio in base a criteri funzionali, tecnologici ed economici.Il plc linguaggi program
Il plc linguaggi programGilda Tobia
╠²
Il documento tratta elementi e linguaggi di programmazione per PLC, descrivendo software, strutture logiche, e metodologie di programmazione come il linguaggio ladder e grafcet. Viene evidenziato il processo di programmazione, dall'assegnazione degli elementi alla validazione del programma, considerando anche criteri di scelta e installazione dei PLC. Inclusi sono standard normativi e requisiti di sicurezza, nonch├® dettagli sulla gestione e manutenzione dei PLC.Esercizi plc
Esercizi plcGilda Tobia
╠²
Il documento presenta esercizi relativi alla progettazione di circuiti per il controllo di motori mediante un PLC. Gli esercizi richiedono di disegnare schemi di comando per avviare e arrestare motori in diverse condizioni temporali e attraverso l'uso di fine corsa. Viene anche chiesto di riflettere sulle differenze tra i circuiti progettati e la scelta del sistema pi├╣ adatto per l'arresto automatico di un motore.Lezione 3 arduino - corso 20 ore
Lezione 3 arduino - corso 20 oreMirko Mancin
╠²
Il documento fornisce una guida su come utilizzare Arduino con diversi componenti, come display LCD, sensori e varie modalit├Ā di comunicazione (seriale, Ethernet, Wi-Fi, I2C). Vengono presentati esempi pratici di programmazione per la visualizzazione di dati e l'interazione con dispositivi mediante protocolli specifici. Inoltre, si esplorano varie shield e moduli Wi-Fi per creare comunicazioni wireless e reti ad hoc.