Sensors, actuators and the Raspberry PI using Python
?Download as PPT, PDF?
3 likes?2,990 views

This document discusses connecting sensors, actuators, and other peripherals to a Raspberry Pi using GPIO pins and programming their functionality using Python. It provides code samples for configuring GPIO pins for input and output, controlling relays connected to GPIO pins, reading from a sensor connected to a GPIO pin, and communicating with an AD/DA board over I2C.




![Relay controller sample code
import RPi.GPIO as GPIO
import time
pins = [22,23,24,25]
for p in pins:
GPIO.setup(p, GPIO.OUT)
while True:
for q in pins:
GPIO.output(q, GPIO.HIGH)
time.sleep(5)
for q in pins:
GPIO.output(q, GPIO.LOW)
time.sleep(5)](https://image.slidesharecdn.com/workingwitharaspberrypi-151128155857-lva1-app6892/85/Sensors-actuators-and-the-Raspberry-PI-using-Python-13-320.jpg)





Sensors, actuators and the Raspberry PI using Python
- 1. Sensors, actuators and the Raspberry PI Programming GPIO using Python
- 2. Raspberry PI vs Desktop PC ? Smaller footprint ? Slower processor ? Less memory ? Non-standard peripherals
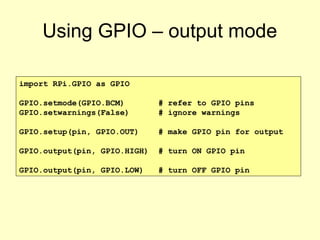
- 6. Using GPIO ¨C output mode import RPi.GPIO as GPIO GPIO.setmode(GPIO.BCM) # refer to GPIO pins GPIO.setwarnings(False) # ignore warnings GPIO.setup(pin, GPIO.OUT) # make GPIO pin for output GPIO.output(pin, GPIO.HIGH) # turn ON GPIO pin GPIO.output(pin, GPIO.LOW) # turn OFF GPIO pin
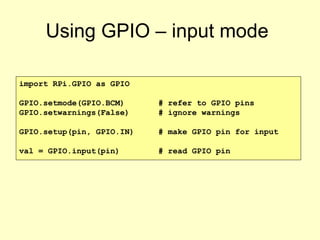
- 7. Using GPIO ¨C input mode import RPi.GPIO as GPIO GPIO.setmode(GPIO.BCM) # refer to GPIO pins GPIO.setwarnings(False) # ignore warnings GPIO.setup(pin, GPIO.IN) # make GPIO pin for input val = GPIO.input(pin) # read GPIO pin
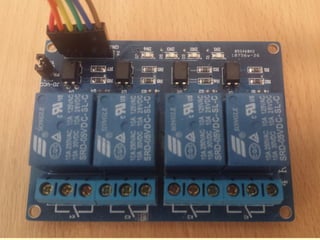
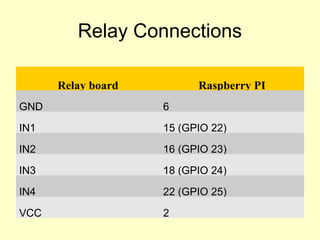
- 11. Relay Connections Relay board Raspberry PI GND 6 IN1 15 (GPIO 22) IN2 16 (GPIO 23) IN3 18 (GPIO 24) IN4 22 (GPIO 25) VCC 2
- 13. Relay controller sample code import RPi.GPIO as GPIO import time pins = [22,23,24,25] for p in pins: GPIO.setup(p, GPIO.OUT) while True: for q in pins: GPIO.output(q, GPIO.HIGH) time.sleep(5) for q in pins: GPIO.output(q, GPIO.LOW) time.sleep(5)
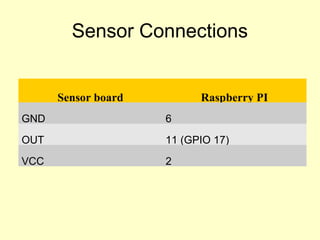
- 17. Sensor Connections Sensor board Raspberry PI GND 6 OUT 11 (GPIO 17) VCC 2
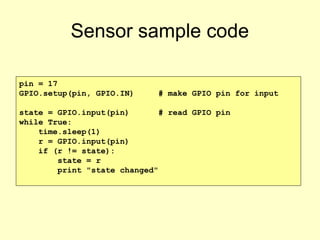
- 18. Sensor sample code pin = 17 GPIO.setup(pin, GPIO.IN) # make GPIO pin for input state = GPIO.input(pin) # read GPIO pin while True: time.sleep(1) r = GPIO.input(pin) if (r != state): state = r print "state changed"
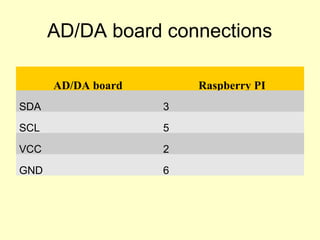
- 21. AD/DA board connections AD/DA board Raspberry PI SDA 3 SCL 5 VCC 2 GND 6
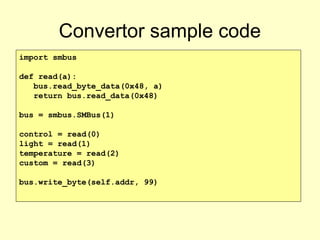
- 22. Convertor sample code import smbus def read(a): bus.read_byte_data(0x48, a) return bus.read_data(0x48) bus = smbus.SMBus(1) control = read(0) light = read(1) temperature = read(2) custom = read(3) bus.write_byte(self.addr, 99)