

Shive
- 1. ROBOT NAVIGATIONROBOT NAVIGATION ININ DISCRETE & CONTINUOSDISCRETE & CONTINUOS ENVIRONMENTSENVIRONMENTS BY :BY : SOHEIL GHANBARISOHEIL GHANBARI HOSSEIN MOBASHERHOSSEIN MOBASHER
- 2. ï Introduction ï Discrete ï Uniformed Search Algorithms ï DFS ï BFS ï Informed Search Algorithms ï RBFS ï A* ï Genetic Algorithm ï Hill Climbing ï Continues ï ANT Colony ï Rapidly-exploring Random Tree ï References
- 3. ï Path planning in robotics consists in the design of the âbestâ geometric path between two given configurations. ï Often the term motion planning is used to include also the design of the time law (time history) that the rover must follow on the geometric path. ï The geometric path must avoid all obstacles present in the physical space.
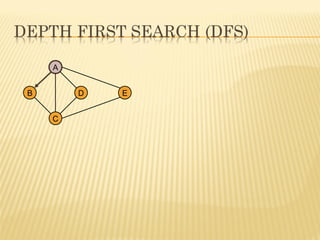
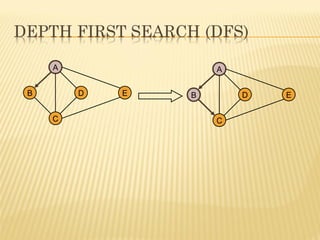
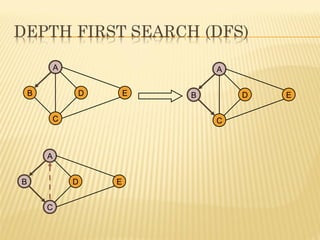
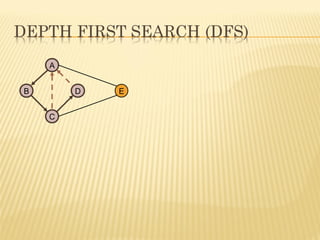
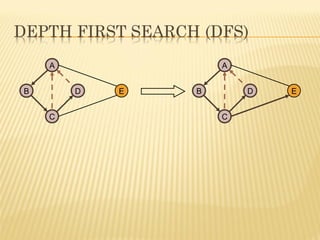
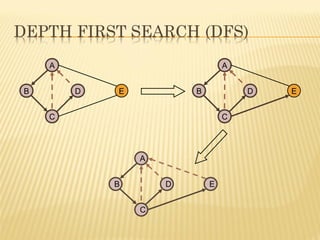
- 4. ï Depth-first searchĖý(DFS) is anĖýalgorithmĖýfor traversing or searchingĖýtreeĖýorĖýgraphĖýdata structures. ï One starts at theĖýrootĖý(selecting some node as the root in the graph case) and explores as far as possible along each branch beforeĖýbacktracking.
- 5. DB A C E
- 9. DB A C E
- 12. ï Complete? ï No: fails in infinite-depth spaces, spaces with loops. ï Modify to avoid repeated states along path. ï Complete in finite spaces ï Time Complexity ? ï O(bm ): terrible if m is much larger than b ï But if solutions are dense, may be much faster than breadth-first. ï Optimal? ï No
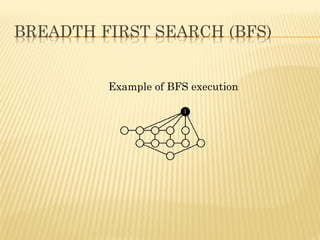
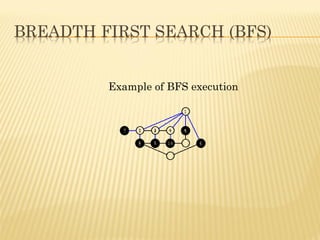
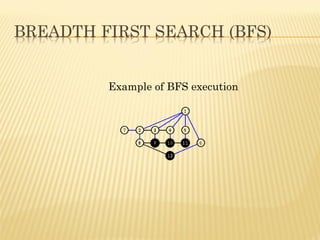
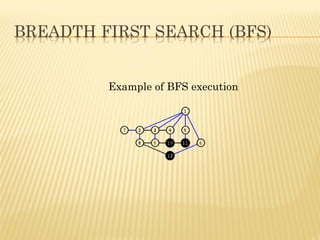
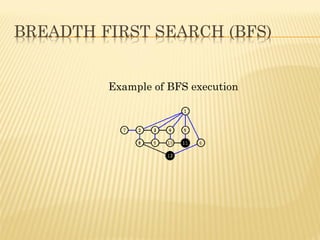
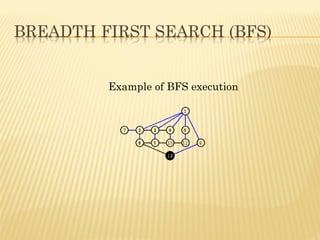
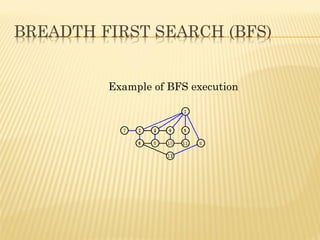
- 13. ï Breadth-First SearchĖý(BFS) is aĖýstrategy for searching in a graphĖýwhen search is limited to essentially two operations: ï visit and inspect a node of a graph. ï gain access to visit the nodes that neighbor the currently visited node. ï Expand shallowest unexpanded node.
- 14. Example of BFS execution
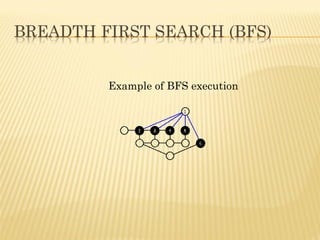
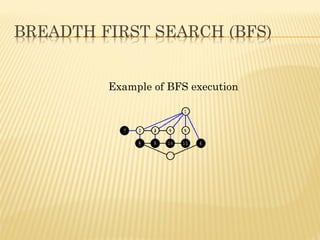
- 15. Example of BFS execution
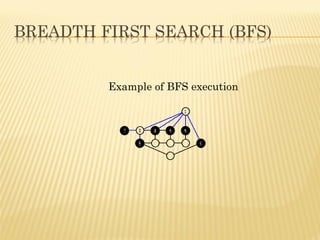
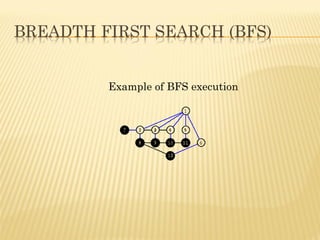
- 16. Example of BFS execution
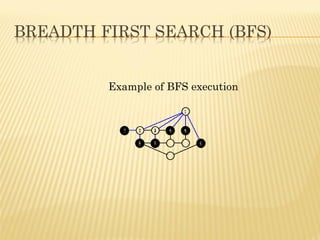
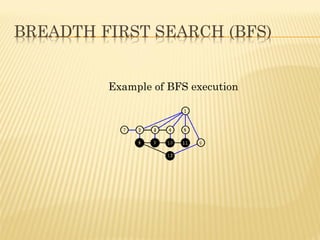
- 17. Example of BFS execution
- 18. Example of BFS execution
- 19. Example of BFS execution
- 20. Example of BFS execution
- 21. Example of BFS execution
- 22. Example of BFS execution
- 23. Example of BFS execution
- 24. Example of BFS execution
- 25. Example of BFS execution
- 26. Example of BFS execution
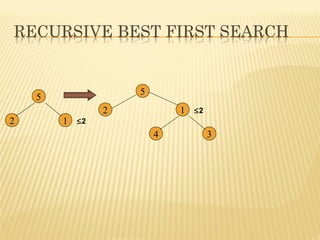
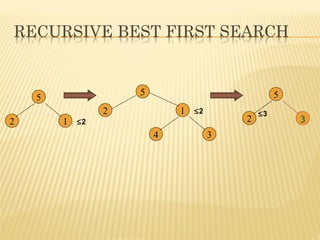
- 28. ï RBFS is a linear-space algorithm that expands nodes in best-first order even with a non-monotonic cost function and generates fewer nodes than iterative deepening with a monotonic cost function.
- 29. 55 1122 âĪ2
- 32. ï Complete? ï Like A*. ï Time Complexity ? ï Time complexity difficult to characterize. ï The worst-case time complexity of RBFS is O(b2d - 1 ). ï Optimal? ï Like A*, optimal if h(n) is admissible.
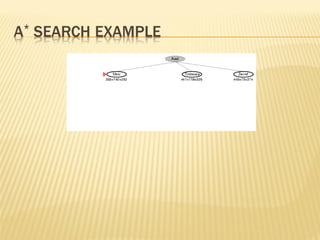
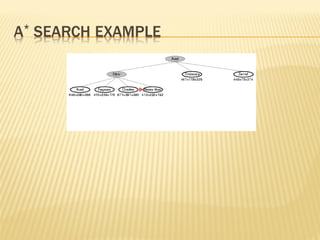
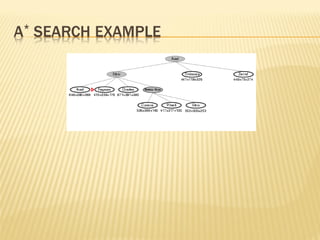
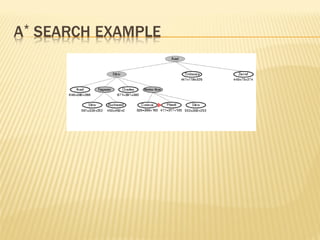
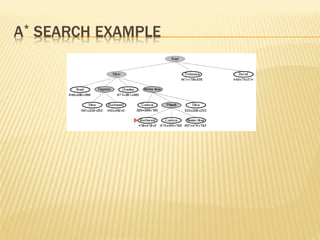
- 33. ï Idea: avoid expanding paths that are already expensive. ï Evaluation function f(n) = g(n) + h(n) ï g(n) = cost so far to reach n ï h(n) = estimated cost to goal from n ï f(n) = estimated total cost of path through n to goal
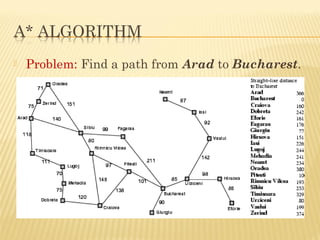
- 34. ï Problem: Find a path from Arad to Bucharest.
- 43. ï Genetic Algorithms were invented to mimic some of the processes observed in natural evolution. ï The idea with GA is to use this power of evolution to solve optimization problems.
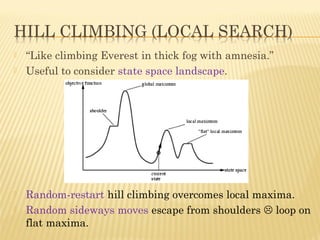
- 45. ï âLike climbing Everest in thick fog with amnesia.â ï Useful to consider state space landscape. ï Random-restart hill climbing overcomes local maxima. ï Random sideways moves escape from shoulders ï loop on flat maxima.
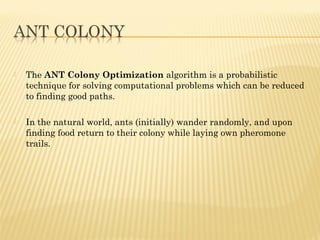
- 46. ï TheĖýANT Colony OptimizationĖýalgorithmĖýis a probabilistic technique for solving computational problems which can be reduced to finding good paths. ï In the natural world, ants (initially) wanderĖýrandomly, and upon finding food return to their colony while laying own pheromone trails.
- 48. ï RRT is a data structure and algorithm that is designed for efficiently searching nonconvex high-dimensional spaces. ï RRTs are constructed incrementally in a way that quickly reduces the expected distance of a randomly- chosen point to the tree.
- 49. An animation of a RRT starting from iteration 0 till 10000
- 50. ï Artificial Intelligence, A modern approach. 2nd Edition, Stuart J. Russel, Peter Norving. ï http://www.doc.ic.ac.uk/~nd/surprise_97/journal/vol4/jmd/ ï http://www.ladispe.polito.it/robotica/PhDcourse/2009/Path_planning_en_slides.pdf ï http://citeseer.ist.psu.edu/311812.html ï http://eprints.kfupm.edu.sa/60786/1/60786.pdf ï http://www.cse.ohio-state.edu/~gurari/course/cis680/ ï http://www.biolab.si/gregorl/Students/mui/Recursive%20Best-First%20Search.ppt ï http://www.cs.ucf.edu/~dmarino/ucf/cop3502/lec_biswas/recursion12.pdf ï http://www.ics.uci.edu/~smyth/courses/cs271/topic3_heuristicsearch.ppt ï http://pdf.aminer.org/000/265/208/autonomous_path_planning_in_a_variety_of_environment s.pdf
- 51. Any Question ?
- 52. Thanks for your attention ï