













![FSMŠĶRTC„Õ„ģ©`„ą„ļ©`„Æ
ŹŌ^¤Ī¤æ¤į¤Ī¼¼Šg
?CSP£ØCommunicating Sequential Processes£©
K?ŠŌ¤Ėév¤¹¤ė„ׄķ„»„¹ÓĖć¤ĪĄķÕ”£ŠĪŹ½
ŹĖÓŹö¤Č„ā„Ē„ėŹĖĘ÷¤Ė¤č¤ėŹŌ^¤¬æÉÄÜ”£
?FDR£ØFailures/Divergence Refinement£©
„ā„Ē„ėŹĖĘ÷„Ä©`„ė”£
¤ņź?
®¤Ź¤ėĶØŠÅ„ā„Ē„ė£ØCSP¤ČRTC£©
Ķ¬ĘŚ/?Ķ¬ĘŚ ¤«¤Ä KĮŠµÄ
Ķ¬ĘŚ ¤«¤Ä ßxkµÄ
RTC RTC
„Ē©`„æ„Ż©`„Č
CSP CSP
„Į„ć„Ķ„ė
Åä?„ķ„܄ƄȤĪ„·„ß„å„ģ©`„·„ē„ó
Stat
e1
Stat
e2
Stat
e3
FSMg×°„Õ„ģ©`„ą„ļ©`„Æ
„¤„Ł„ó„Č
??CÄÜ
„³©`„ė„Š„Ć„Æ
CÄÜ
FSMI/F
FSMŠĶRTC
FSMg?„Ø„ó„ø„ó
(Macho.h/cpp)
„Ē©`„æ
„Ż©`„Č
OMGĖŹ¤ĖŹ¤·¤æFSMŠĶRTC¤Īg×°
דBßwŅʤĖ¤č¤ė„¢„ׄź„±©`„·„ē„ó¤ĪÓŹö
·ÖÉ¢„³„ó„Ż©`„Ķ„ó„ČŠĶ„·„¹„Ę„ą£ØRTM
¤äROS£©¤Ē¤Ļ„Ē„Ć„É„ķ„Ć„Æ”¢„鄤„Ö
„ķ„Ć„Æ¤ņæ¼]¤·¤Ź¤±¤ģ¤Š¤Ź¤é¤Ź¤¤
¢Ł
¢Ś
¢Ū
¢Ü
¢Ż
דB¤ņ³Ö¤ĮĻą»„×÷?¤¹¤ė„ķ„Ü„Ć„Č
£ØÅä?„·„¹„Ę„ą¤ĪĄż£©
£ØRTC¤ĪæÉQCÄܤņŹ¹?¤·¤Ę£©
Ķ¬ĘŚ ¤«¤Ä ßxkµÄ„Ż©`„Ȥņg×°
„¢„ׄź„±©`„·„ē„óĄż
FDR¤ĪÖøÕŖ¤Ė¤č¤ź”¢¤³¤³¤Ē»Ų±Üß\
Óé_Ź¼¤ĪĶØÖŖ¤ĪŹÜŠÅ¤ņßxkµÄ¤Ė?¤ļ
¤Ź¤¤öŗĻ”¢2ĢؤĪ„ķ„܄ƄȤ¬¤Ū¤ÜĶ¬
r¤Ė¾ÆøęדB¤ĖßwŅʤ·”¢„Ē„Ć„É
„ķ„Ć„Æ¤¹¤ė¤³¤Č¤¬·Ö¤«¤Ć¤æ
„Ē„Ć„É„ķ„Ć„Æ¤·¤Ź¤¤¤č¤¦
דBßwŅʤņŠŽÕż
£±£©CSP¤ĒŹĖÓŹö”¢£²£©FDR¤ĒŹŌ^”¢£³£©CSP„ā„Ē„ė¤ņ¤½¤Ī¤Ž¤Žg×°
æÉÄܤŹRT„ß„É„ė„¦„§„¢¤ĪÉĻ¤Ī½M¤ß¤ņŗB
Ń}ŹżĢؤĪ„ķ„܄ƄȤĪ
fÕ{ÖĘÓł¤Ėź?æÉÄÜ](https://image.slidesharecdn.com/230628-01-230627101451-4d192c0e/85/ROBOMECH2023-RT-1-16-320.jpg)


























![„Ē©`„æ䏿
struct TimedShort
{
Time tm;
short data;
};
struct TimedShortSeq
{
Time tm;
sequence<short> data;
};
? »ł±¾ŠĶ
ØC tm£ŗræĢ
ØC data: „Ē©`„椽¤Ī¤ā¤Ī
? „·©`„±„󄹊Ķ
ØC data[i]: Ģķ¤Ø×Ö¤Ė¤č¤ė„¢„Æ„»„¹
ØC data.length(i): éL¤µi¤ņ“_±£
ØC data.length(): éL¤µ¤ņČ”µĆ
? „Ē©`„æ¤ņČė¤ģ¤ė¤Č¤¤Ė¤Ļ¤¢¤é¤«¤ø¤į
éL¤µ¤ņ„»„ƄȤ·¤Ź¤±¤ģ¤Š¤Ź¤é¤Ź¤¤”£
? CORBA¤Ī„·©`„±„󄹊Ķ¤½¤Ī¤ā¤Ī
? ½ńįįäøü¤µ¤ģ¤ėæÉÄÜŠŌ¤¢¤ź
0.2.0¤Ē¤Ļ×ŌÓ¤Ē¬FŌŚræĢ¤ņ
„»„ƄȤ·¤Ę¤¤¤æ¤¬”¢0.4.0¤Ē¤Ļ
±ŲŅŖ¤Ėź¤ø¤Ę”¢ŹÖÓ¤Ē„»„Ć„Č
¤¹¤ė±ŲŅŖ¤¢¤ź](https://image.slidesharecdn.com/230628-01-230627101451-4d192c0e/85/ROBOMECH2023-RT-1-43-320.jpg)

![Push„Ż„ź„·©`
? „Š„Ć„Õ„”²ŠĮō„Ē©`„æ
ØC ĖĶ¤ź·½¤Ī„Ż„ź„·
ØC „Ē©`„æÉś³É?ĻūŁMĖŁ¶Č¤ņ
æ¼]¤·¤ĘŌO¶Ø¤¹¤ė±ŲŅŖ
¤¬¤¢¤ė”£
„Ż„ź„· ĖĶ¤ź·½
ALL Č«²æĖĶŠÅ
FIFO ĻČČė¤ģįį¤Ą¤·¤Ē1¤ŗ¤ÄĖĶŠÅ
NEW ×īŠĀ¤Ī¤ßĖĶŠÅ
SKIP n¤Ŗ¤¤ĖégŅż¤¤¤ĘĖĶŠÅ
45
Óčøå¤Ė¤ĻNEW¤ĪÕhĆ÷¤ĖLIFO¤ČÓŹö¤·¤Ę¤¤¤Ž¤·¤æ¤¬Õż“_¤Ė¤Ļ
LIFO¤Ē¤Ļ¤Ź¤Æ×īŠĀ¤Ī¤ß¤ĪĖĶŠÅ¤Ē¤¹”£LIFOŠĪŹ½¤Ī„Ż„ź„·¤ņ
§Čė¤¹¤ė¤«¤É¤¦¤«¤ĻŹÓÖŠ¤Ē¤¹”£¤“ŅāŅ¤Æ¤Ą¤µ¤¤”£
ALL
FIFO
NEW
SKIP](https://image.slidesharecdn.com/230628-01-230627101451-4d192c0e/85/ROBOMECH2023-RT-1-45-320.jpg)


![Configuration¤Īg×°Ąż
„Ų„Ć„Ą
䏿ŠūŃŌ
int m_int_param0;
double m_double_param0;
g×°„Õ„”„¤„ė
ĻČī^²æ·Ö£ŗspec¶ØĮx¤Ė¤Ę
static const char* configsample_spec[] = {
:ÖŠĀŌ
"conf.default.int_param0", ”°0",
"conf.default.double_param0", ”°1.1",
:ÖŠĀŌ};
onInitialize()¤Ė¤Ę
bindParameter(”°int_param0”±, m_int_param0, ”°0”±);
bindParameter(”°double_param0”±, m_double_param0, ”°1.1”±);
istream operator>>¤¬
¶ØĮx¤µ¤ģ¤Ę¤¤¤ėŠĶ¤Ē¤¢
¤ģ¤Š¤É¤ó¤ŹŠĶ¤Ē¤āæÉÄÜ](https://image.slidesharecdn.com/230628-01-230627101451-4d192c0e/85/ROBOMECH2023-RT-1-48-320.jpg)

ROBOMECH2023 RT„ß„É„ė„¦„§„¢ÖvĮ»į µŚ1²æ
- 1. RTMÖvĮ»į²Ī¼ÓÕßø÷Ī» ? ±¾?¤ĪÖvĮ»į„Ś©`„ø?https://x.gd/7mBYI ? ÖvĮ»įÖŠ?½KĮĖįį¤ĪŁ|¤ĻSlack¤Ė¤Ę¤Ŗī¤¤¤·¤Ž¤¹”£ ØC Slack²Ī¼Ó„ź„ó„Æ? https://x.gd/854Iy 1
- 3. ¤Ļ¤ø¤į¤Ė ? RT„ß„É„ė„¦„Ø„¢¤ĪøÅŅŖ ØC »ł±¾øÅÄī ? „ķ„Ü„Ć„Č„½„Õ„Č„¦„§„¢¤ĪÓĻņ ? „ā„ø„å©`„ė»Æ¤Ī„į„ź„Ć„Č ? RT„³„ó„Ż©`„Ķ„ó„ȤĪ»ł±¾CÄÜ ? ĖŹ»Æ ? „³„ß„å„Ė„Ę„£ 3
- 5. 5 5 ? RT = Robot Technology cf. IT ØC ”ŁReal-time ØC gĢå¤Ī„ķ„܄ƄȤĄ¤±¤Ē¤Ź¤Æ”¢¤µ¤Ž¤¶¤Ž¤Ź„ķ„Ü„Ć„Č¼¼Šg¤Ė»ł¤Å¤Æ CÄÜŅŖĖŲ¤ņ¤āŗ¬¤ą („»„ó„µ”¢„¢„Æ„Į„å„Ø©`„æ, ÖĘÓł„¹„©`„ą”¢„¢ „ė„“„ź„ŗ„ą”¢etc”.) ? RT-Middleware £ØRTM) ØC RTŅŖĖŲ¤Ī„¤„ó„Ę„°„ģ©`„·„ē„ó¤Ī¤æ¤į¤Ī„ß„É„ė„¦„Ø„¢ ? RT-Component £ØRTC) ØC RT-Middleware¤Ė¤Ŗ¤±¤ė„½„Õ„Č„¦„Ø„¢¤Ī»ł±¾ gĪ» RT-Middleware + + + + + RT¤Č¤Ļ? ®b¾tŃŠ°ęRT„ß„É„ė„¦„Ø„¢ OpenRTM-aist
- 6. „ķ„Ü„Ć„Č„ß„É„ė„¦„Ø„¢¤Ė¤Ä¤¤¤Ę ? „ķ„Ü„Ć„Č„·„¹„Ę„ąŗB¤ņæĀŹ»Æ¤¹¤ė¤æ¤į¤Ī¹²ĶØC ÄܤņĢį¹©¤¹¤ė»ł±P„½„Õ„Č„¦„Ø„¢ ØC ”ø„ķ„Ü„Ć„ČOS”¹¤Čŗō¤Š¤ģ¤ė¤³¤Č¤ā¤¢¤ė ØC „¤„ó„æ©`„Õ„§©`„¹?„ׄķ„Č„³„ė¤Ī¹²ĶػƔ¢ĖŹ»Æ ØC Ąż¤Č¤·¤Ę ? „ā„ø„å©`„ė»Æ?„³„ó„Ż©`„Ķ„ó„Č»Æ„Õ„ģ©`„ą„ļ©`„ƤņĢį¹© ? „ā„ø„å©`„ėég¤ĪĶ؊Ťņ„µ„Ż©`„Č ? „Ń„é„į©`„æ¤ĪŌO¶Ø”¢ÅäÖĆ”¢ĘšÓ”¢„ā„ø„å©`„ė¤ĪŃ}ŗĻ»Æ£Ø½YŗĻ £©CÄܤņĢį¹© ? ³éĻó»Æ¤Ė¤č¤ź”¢OS¤ä?ÕZégßBŠÆ?Ļą»„ß\?¤ņg¬F ? 2000Äź¤“¤ķ¤«¤éé_°k¤¬»ī°k»Æ ØC ŹĄ½ēø÷¹ś¤Ē”©¤Ź„ß„É„ė„¦„Ø„¢¤¬é_°k?¹«é_¤µ¤ģ¤Ę ¤¤¤ė 6
- 8. 8 „ķ„܄ƄȤĖ¤č¤Ć¤Ę”¢„¤„ó„æ©`„Õ„§©`„¹¤Ļ?”© »„QŠŌ¤¬o¤±¤ģ¤Š¤Ä¤Ź¤¬¤é¤Ź¤¤ Robot Arm1 Robot Arm2 Controller software Humanoid?s Arm Control software Robot Arm Control software ¾Ą“¤Ī„·„¹„Ę„ą¤Ē¤Ļ” Controller
- 9. 9 compatible arm interfaces RT„ß„É„ė„¦„Ø„¢¤Ļe”©¤Ė×÷¤é¤ģ¤æ „½„Õ„Č„¦„Ø„¢„ā„ø„å©`„ėĶ¬?¤ņ椰 ¤æ¤į¤Ī¹²ĶØ„¤„ó„æ©`„Õ„§©`„¹ ¤ņĢį¹©¤¹¤ė „½„Õ„Č„¦„Ø„¢¤ĪŌŁĄū?ŠŌ¤ĪĻņÉĻ RT„·„¹„Ę„ąŗB¤¬ČŻŅפĖ¤Ź¤ė Controller software Arm A Control software Arm B Control software RT„ß„É„ė„¦„Ø„¢¤Ē¤Ļ” Robot Arm1 Robot Arm2 Controller
- 10. „ķ„Ü„Ć„Č„½„Õ„Č„¦„§„¢é_°k¤Ī?Ļņ „³„ó„Ż©`„Ķ„ó„ČÖøĻņé_°k ¾Ą“ŠĶé_°k „«„į„é „Ž„¤„Æ ī^?ĶóńlÓ ?ÉłŗĻ³É „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó Ō ?ÉłÕJ×R īÕJ×R „ß„É„ė„¦„§„¢ „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó Ō ?ÉłÕJ×R īÕJ×R „«„į„é „Ž„¤„Æ ī^?ĶóńlÓ ?ÉłŗĻ³É ع ”©¤ŹCÄܤņČŚŗĻµÄ¤ĖŌOÓ Ø¹ g?r¤ĪæĀŹ¤Ļ?¤¤¤¬”¢ČįÜŠŌ¤Ė?¤±¤ė ع „·„¹„Ę„ą¤¬Ń}ėj»Æ¤·¤Ę¤Æ¤ė¤Čé_°k¤¬Ą§ėy¤Ė ع ?ŅÄ£Ń}ėj¤ŹCÄܤĪ·Öøī?½yŗĻ ع é_°k?±£ŹŲæĀŹ»Æ£ØCÄܤĪŌŁĄū?µČ£© ع „·„¹„Ę„ą¤ĪČįÜŠŌĻņÉĻ 10
- 11. „ā„ø„å©`„ė»Æ¤Ī„į„ź„Ć„Č ? ŌŁĄū?ŠŌ¤ĪĻņÉĻ ØC Ķ¬¤ø„³„ó„Ż©`„Ķ„ó„Ȥņ¤¤¤ķ¤¤¤ķ¤Ź„·„¹„Ę„ą¤ĖŹ¹¤¤¤Ž¤ļ¤»¤ė ? ßxkÖ«¤Ī¶ą»Æ ØC Ķ¬¤øCÄܤņ³Ö¤ÄŃ}Źż¤Ī„ā„ø„å©`„ė¤ņŌ¤¹¤³¤Č¤¬¤Ē¤¤ė ? ČįÜŠŌ¤ĪĻņÉĻ ØC „ā„ø„å©`„ė½Ó¾A³É¤«¤Ø¤ė¤Ą¤±¤Ē”©¤Ź„·„¹„Ę„ą¤ņŗB¤Ē¤¤ė ? ŠÅīmŠŌ¤ĪĻņÉĻ ØC „ā„ø„å©`„ė gĪ»¤Ē„Ę„¹„ČæÉÄܤŹ¤æ¤įŠÅīmŠŌ¤¬ĻņÉĻ¤¹¤ė ? ŌĄĪŠŌ¤ĪĻņÉĻ ØC „·„¹„Ę„ą¤¬„ā„ø„å©`„ė¤Ē·Öøī¤µ¤ģ¤Ę¤¤¤ė¤Ī¤Ē”¢?¤Ä¤Īī}¤¬Č« Ģå¤Ė²Ø¼°¤·¤Ė¤Æ¤¤ 11
- 12. RT„³„ó„Ż©`„Ķ„ó„Č»Æ¤Ī„į„ź„Ć„Č „ā„ø„å©`„ė»Æ¤Ī„į„ź„ƄȤĖ¼Ó¤Ø¤Ę ? „½„Õ„Č„¦„Ø„¢„Ń„æ©`„ó¤ņĢį¹© ØC „ķ„܄ƄȤĖĢŲÓŠ¤Ī„½„Õ„Č„¦„Ø„¢„Ń„æ©`„ó¤ņĢį¹©¤¹¤ė ¤³¤Č¤Ē”¢ĢåĻµµÄ¤Ź„·„¹„Ę„ąŗB¤¬æÉÄÜ ? „Õ„ģ©`„ą„ļ©`„ƤĪĢį¹© ØC „Õ„ģ©`„ą„ļ©`„Ƥ¬Ģį¹©¤µ¤ģ¤Ę¤¤¤ė¤Ī¤Ē”¢„³„¢¤Ī„ķ„ø „Ć„Æ¤Ė¼ÆÖŠ¤Ē¤¤ė ? ·ÖÉ¢„ß„É„ė„¦„Ø„¢ ØC „ķ„Ü„Ć„ČĢåÄŚLAN¤ä„Ķ„Ć„Č„ļ©`„Æ„ķ„܄ƄȤŹ¤É”¢·Ö É¢„·„¹„Ę„ą¤ņČŻŅפĖŗBæÉÄÜ 12
- 13. RT„³„ó„Ż©`„Ķ„ó„ȤĪÖ÷¤ŹCÄÜ 13 Inactive Active Error „¢„Æ„Ę„£„Ó„Ę„£?g?„³„ó„Ę„„¹„Č „鄤„Õ„µ„¤„Æ„ė¤Ī¹ÜĄķ?„³„¢„ķ„ø„Ć„Æ¤Īg? ¹²ĶؤĪדBßwŅĘ „»„ó„µRTC Ń}ŗĻg? ÖĘÓłRTC „¢„Æ„Į„å„Ø©`„æRTC „؄󄳩`„Ą „³„ó„Ż©`„Ķ„ó„Č „¢„Æ„Į„å„Ø©`„æ „³„ó„Ż©`„Ķ„ó„Č ÖĘÓłĘ÷ „³„ó„Ż©`„Ķ„ó„Č 1 TI s TDs Kp + - ?Ė Ī»ÖĆ Ī»ÖĆ „Č„ė„Æ „Ē©`„æ„Ż©`„Č ? „Ē©`„æÖøĻņ„Ż©`„Č ? ßB¾AµÄ¤Ź„Ē©`„æ¤ĪĖĶŹÜŠÅ ? ӵĤŹ½Ó¾A?ĒŠ¶Ļ „Ē©`„æÖøĻņĶØŠÅCÄÜ „µ©`„ܤĪĄż ? ¶ØĮxæÉÄܤŹ„¤„ó„æ©`„Õ„§©`„¹¤ņ³Ö¤Ä ? ÄŚ²æ¤ĪŌ¼¤ŹCÄܤĖ„¢„Æ„»„¹ ØC „Ń„é„į©`„æČ”µĆ?ŌO¶Ø ØC „ā©`„ÉĒŠĢę ØC etc” „µ©`„Ó„¹„Ż©`„Č »Ļń „Ē©`„æ 3D„Ē„ׄ¹ „Ē©`„æ „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó¤ĪĄż „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó „¤„ó„æ©`„Õ„§©`„¹ ?„ā©`„ÉŌO¶ØévŹż ?׳ĖĻµŌO¶ØévŹż ?„„ć„ź„Ö„ģ©`„·„ē„ó ?etc” „µ©`„Ó„¹„Ż©`„Č „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó „³„ó„Ż©`„Ķ„ó„Č „Ē©`„æ„Ż©`„Č „µ©`„Ó„¹ÖøĻņĻą»„×÷?CÄÜ ĆūĒ° „»„Ć„ČĆū ĆūĒ° „»„Ć„ČĆū Ń}Źż¤Ī„»„ƄȤņ Ó×÷r¤Ė ĒŠ¤źĢę¤Ø¤Ę Ź¹?æÉÄÜ „³„ó„Õ„£„®„å„ģ©`„·„ē„ó ? „Ń„é„į©`„æ¤ņ±£³Ö¤¹¤ėŹĖ½M¤ß ? ¤¤¤Æ¤Ä¤«¤Ī„»„ƄȤņ±£³ÖæÉÄÜ ? g?r¤ĖӵĤĖäøüæÉÄÜ
- 14. OpenRTM 2.0¤ĪŠĀCÄÜ ? Ļą»„ß\?„Õ„ģ©`„ą„ļ©`„ƤĪ§? ØC DPSF?Dynamic Protocol Switching Framework ØC ROS?ROS2µČ¤Ī„Č„Ō„Ć„ÆĶØŠÅCÄÜ ØC Ėū„ׄķ„Č„³„ė„Ē©`„æĶØŠÅCÄܤĪÓµÄ×·¼ÓæÉÄÜ ? FSM„Õ„ģ©`„ą„ļ©`„Æ ØC דBßwŅĘ„³„ó„Ż©`„Ķ„ó„ȤĪ¤æ¤į¤Ī„Õ„ģ©`„ą„ļ ©`„Ƨ? ? ¤½¤ĪĖūėj¶ą¤ŹCÄÜ×·¼Ó 14
- 15. DPSF Dynamic Protocol Switching Framework „Ż„¤„ó„Č ? Ėū¤Ī„ׄķ„Č„³„ė¤Č¤ĪĶ؊Ť¬æÉÄÜ ? ®¤Ź¤ė„Ē©`„æŠĶég¤ĪĶ؊Ť¬æÉÄÜ ? ? ĶØŠÅäQ„ā„ø„å©`„ė¤ņg×° ¤¹¤ė±ŲŅŖ¤¢¤ź ? ”š RTC¤Ī„³©`„ɤĻäøü²»ŅŖ ? Ąū?æÉÄܤŹäQ„ā„ø„å©`„ė ØC ROS ØC ROS2 ØC SSM ØC DIOP: UDPĶØŠÅ 15 RTC ROS„Ī©`„É Ėū¤Ī„ׄķ„Č„³„ė¤Č¤ĪĶ؊Ť¬æÉÄÜ ®¤Ź¤ė„Ē©`„æŠĶ¤Ī„Ż©`„ČégĶ؊Ť¬æÉÄÜ RTC1 RTC2 RTC::CameraImageŠĶ Img::TimedCameraImageŠĶ „Õ„”„Æ„Č„ź TimedLong- TimedFloatäQ RTM-ROS „Ē©`„æŠĶäQ CORBA CDR „·„ź„¢„鄤„¶ „·„ź„¢„鄤„¶Ćū corba ros:std_msgs/Int32 corba:RTC/TimedShort:RTC/ TimedDouble Éś³ÉévŹż Ąż¤Ø¤Š”¢”øRTM ØC ROS„Ē©`„æäQ”¹ ¤Ī„·„ź„¢„鄤„¶¤ņŹ¹¤¦öŗĻ¤Ļ ”øros::std_msgs/Int32”¹¤ņÖø¶Ø¤¹¤ė”£
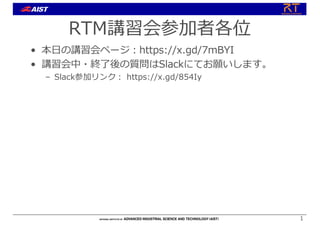
- 16. FSMŠĶRTC„Õ„ģ©`„ą„ļ©`„Æ ŹŌ^¤Ī¤æ¤į¤Ī¼¼Šg ?CSP£ØCommunicating Sequential Processes£© K?ŠŌ¤Ėév¤¹¤ė„ׄķ„»„¹ÓĖć¤ĪĄķÕ”£ŠĪŹ½ ŹĖÓŹö¤Č„ā„Ē„ėŹĖĘ÷¤Ė¤č¤ėŹŌ^¤¬æÉÄÜ”£ ?FDR£ØFailures/Divergence Refinement£© „ā„Ē„ėŹĖĘ÷„Ä©`„ė”£ ¤ņź? ®¤Ź¤ėĶØŠÅ„ā„Ē„ė£ØCSP¤ČRTC£© Ķ¬ĘŚ/?Ķ¬ĘŚ ¤«¤Ä KĮŠµÄ Ķ¬ĘŚ ¤«¤Ä ßxkµÄ RTC RTC „Ē©`„æ„Ż©`„Č CSP CSP „Į„ć„Ķ„ė Åä?„ķ„܄ƄȤĪ„·„ß„å„ģ©`„·„ē„ó Stat e1 Stat e2 Stat e3 FSMg×°„Õ„ģ©`„ą„ļ©`„Æ „¤„Ł„ó„Č ??CÄÜ „³©`„ė„Š„Ć„Æ CÄÜ FSMI/F FSMŠĶRTC FSMg?„Ø„ó„ø„ó (Macho.h/cpp) „Ē©`„æ „Ż©`„Č OMGĖŹ¤ĖŹ¤·¤æFSMŠĶRTC¤Īg×° דBßwŅʤĖ¤č¤ė„¢„ׄź„±©`„·„ē„ó¤ĪÓŹö ·ÖÉ¢„³„ó„Ż©`„Ķ„ó„ČŠĶ„·„¹„Ę„ą£ØRTM ¤äROS£©¤Ē¤Ļ„Ē„Ć„É„ķ„Ć„Æ”¢„鄤„Ö „ķ„Ć„Æ¤ņæ¼]¤·¤Ź¤±¤ģ¤Š¤Ź¤é¤Ź¤¤ ¢Ł ¢Ś ¢Ū ¢Ü ¢Ż דB¤ņ³Ö¤ĮĻą»„×÷?¤¹¤ė„ķ„Ü„Ć„Č £ØÅä?„·„¹„Ę„ą¤ĪĄż£© £ØRTC¤ĪæÉQCÄܤņŹ¹?¤·¤Ę£© Ķ¬ĘŚ ¤«¤Ä ßxkµÄ„Ż©`„Ȥņg×° „¢„ׄź„±©`„·„ē„óĄż FDR¤ĪÖøÕŖ¤Ė¤č¤ź”¢¤³¤³¤Ē»Ų±Üß\ Óé_Ź¼¤ĪĶØÖŖ¤ĪŹÜŠÅ¤ņßxkµÄ¤Ė?¤ļ ¤Ź¤¤öŗĻ”¢2ĢؤĪ„ķ„܄ƄȤ¬¤Ū¤ÜĶ¬ r¤Ė¾ÆøęדB¤ĖßwŅʤ·”¢„Ē„Ć„É „ķ„Ć„Æ¤¹¤ė¤³¤Č¤¬·Ö¤«¤Ć¤æ „Ē„Ć„É„ķ„Ć„Æ¤·¤Ź¤¤¤č¤¦ דBßwŅʤņŠŽÕż £±£©CSP¤ĒŹĖÓŹö”¢£²£©FDR¤ĒŹŌ^”¢£³£©CSP„ā„Ē„ė¤ņ¤½¤Ī¤Ž¤Žg×° æÉÄܤŹRT„ß„É„ė„¦„§„¢¤ĪÉĻ¤Ī½M¤ß¤ņŗB Ń}ŹżĢؤĪ„ķ„܄ƄȤĪ fÕ{ÖĘÓł¤Ėź?æÉÄÜ
- 17. „ß„É„ė„¦„§„¢¤ņĄū?¤·¤æé_°k¤ĪĄūµć 17 ?1 ?2 ¦Č2 ( x , y ) ¦Č1 ¼Č“ę¤Ī¤ā¤Ī¤¬ ŌŁĄū?æÉÄÜ ŠĀŅé_°k¤¬±ŲŅŖ „鄤„Ö„é„ź¤Ź¤É¤ņ Ąū?¤·¤Ę?×÷ 3D„«„į„é Point Cloud °Ń³ÖéĀŌ „ׄé„ó„Ė„ó„° Äęß\ÓѧÓĖć „ķ„Ü„Ć„Č„¢©`„ąÖĘÓł „°„ź„Ć„ŃÖĘÓł „ß„É„ė„¦„§„¢¤ņĄū?¤¹¤ė ¤Č”¢¼Č“ę¤Ī„ā„ø„å©`„ė¤¬ Ąū?¤Ē¤¤ė é_°k¤¹¤ė¤Č¤¤ĖŠĀŅ¤Ė×÷ ¤é¤Ź¤±¤ģ¤Š¤Ź¤é¤Ź¤¤²æ·Ö ¤ĻÉŁ¤Ź¤Æ¤Ęg¤ą „Ō„Ć„„ó„°„ķ„܄ƄȤĪŗBĄż ”łķ¤ĻgėH¤Ī³É¤Ē¤Ļ¤¢¤ź¤Ž¤»¤ó”£
- 18. RT„ß„É„ė„¦„Ø„¢¤Ė¤č¤ė·ÖÉ¢„·„¹„Ę„ą RTC (Java) RTC (C++) RTM Windows RTC (C++) RTC (C++) RTM uITRON RTC (Python) RTC (Java) RTM Linux RTC (C++) RTC (C++) RTM VxWorks RTC (Python) RTC (C++) RTM Real-time Linux RTC (C++) „¢„ׄź„±©`„·„ē„ó ²Ł×÷„Ē„Š„¤„¹ „»„ó„µ „ķ„Ü„Ć„ČA „ķ„Ü„Ć„ČB „ķ„Ü„Ć„ČC „Ķ„Ć„Č„ļ©`„Æ RTM¤Ė¤č¤ź”¢ „Ķ„Ć„Č„ļ©`„ÆÉĻ¤Ė ·ÖÉ¢¤¹¤ėRTC¤ņ OS??ÕZ¤Ī±Ś¤ņ Ō½¤Ø¤Ę½Ó¾A¤¹¤ė ¤³¤Č¤¬¤Ē¤¤ė”£ RTCĶ¬?¤Ī½Ó¾A ¤Ļ”¢„ׄķ„°„é„ą g?ÖŠ¤ĖӵĤĖ ?¤¦¤³¤Č¤¬³öĄ“¤ė”£ RTC (C++) RTC (C++) RTM QNX 18
- 19. 19 RT„ß„É„ė„¦„Ø„¢¤Ī?µÄ „ā„ø„å©`„ė»Æ¤Ė¤č¤ėī}½āQ ? ŹĖ¤ĪĆ÷“_»Æ ? ×īŠĀ¼¼Šg¤ņČŻŅפĖĄū?æÉÄÜ ? Õl¤Ē¤ā„ķ„܄ƄȤ¬×÷¤ģ¤ė „ķ„܄ƄȤĪµĶ„³„¹„Č»Æ ¶ą¤Ź„Ė©`„ŗ¤Ėź „³„¹„ȤĪī} ¼¼Šg¤Īī} „Ė©`„ŗ¤Īī} ? ? ? ? ×īŠĀ¤ĪĄķÕ? „¢„ė„“„ź„ŗ„ą AÉēŃuŅĘÓ„Ł©`„¹ BÉēŃu„¢©`„ą CÉēŃu„»„ó„µ??? ¶ą¤Ź„ę©`„¶ „·„¹„Ę„ąé_°kÕß „«„¹„æ„Ž„¤„ŗ¤¬ČŻŅפĖ RT„³„ó„Ż©`„Ķ„ó„Č»Æ ×īŠĀ¼¼Šg¤ņĄū?æÉÄÜ „ķ„Ü„Ć„Č„·„¹„Ę„ą„¤„ó„Ę„°„ģ©`„·„ē„ó¤Ė¤č¤ė„¤„Ī„Ł©`„·„ē„ó „ā„ø„å©`„ė»Æ?ŌŁĄū? ŹĖ
- 20. g?Ąż?ŃuĘ·»ÆĄż Äŗ¦ź„ķ„Ü„Ć„Č²Łæk„·„ß„å„ģ©`„æ? NEDO/Ē§Č~?? S-ONE?SCHAFT DAQ-Middleware: KEK/J-PARC KEK: High Energy Accelerator Research Organization J-PARC: Japan Proton Accelerator Research Complex HIRO, NEXTAGE open: Kawada Robotics ŠĀ?±¾ė?Ėū: Mobile SEM HRP„·„ź©`„ŗ: “Ø??I”¢AIST RAPUDA?Life Robotics „Ó„å©`„Č„ķ©`„Š©`RTC/RTC-BT(VSTONE) OROCHI£Ø„¢©`„ė„Ę„££© 20
- 21. Practical/commercialization examples Robot operation simulator: NEDO S-ONE?SCHAFT DAQ-Middleware: KEK/J-PARC KEK: High Energy Accelerator Research Organization J-PARC: Japan Proton Accelerator Research Complex HIRO, NEXTAGE open: Kawada Robotics HRP series: KAWADA and AIST TOYOTA L&F?Air-T VSTONE?s education robots OROCHI£ØRT corp.£© 21 THK: SIGNAS system
- 22. RT„ß„É„ė„¦„§„¢¤Ļ¹śėHĖŹ Ćū³Ę „Ł„ó„Ą ĢŲÕ »„QŠŌ OpenRTM-aist ®b¾tŃŠ NEDO PJ¤Ēé_°k”£²ĪÕÕg×°”£ --- HRTM „Ū„ó„Ą „¢„·„ā¤ĻHRTM¤ŲŅĘ?ÖŠ ”ņ OpenRTM.NET „»„Ć„Æ .NET(C#,VB,C++/CLI, F#, etc..) ”ņ RTM on Android „»„Ć„Æ Android°ęRT„ß„É„ė„¦„Ø„¢ ”ņ RTC-Lite ®b¾tŃŠ PIC, dsPICÉĻ¤Īg×° © Mini/MicorRTC SEC NEDO„Ŗ©`„ׄ󄤄Ī„Ł©`„·„ē„óPJ¤Ē é_°k © RTMSafety SEC/AIST NEDOÖŖÄÜ»ÆPJ¤Ēé_°k?CÄÜ°²Č«ÕJ Ō^Č”µĆ © RTC CANOpen SIT, CiA CANI½ēRTMĖŹ © PALRO ø»?„½„Õ„Č ?ŠĶ„Ņ„å©`„Ž„Ī„¤„ɤĪ¤æ¤į¤ĪC++ PSM g×° ”Į OPRoS ETRI ķn¹ś¹ś¼Ņ„ׄķ„ø„§„Æ„Č¤Ē¤Īg×° ”Į GostaiRTC GOSTAI, THALES „ķ„Ü„Ć„Č?ÕZÉĻ¤ĒÓ×÷¤¹¤ėC++ PSM g×° ”Į ĖŹ»Æ½Mæ¤Ē?¾A¤¤ĖŃŲ¤Ć¤Ę²ß¶Ø ”ś 1½Mæ¤Ē¤ĻŁ?¤ĖøÄä¤Ē¤¤Ź¤¤°²?øŠ ”ś ¶ą¤Æ¤Ī»„Qg×°¤¬¤Ē¤¤Ä¤Ä¤¢¤ė ”ś øÕł¤ČĻą»„ß\?ŠŌ¤¬“ŁßM¤µ¤ģ¤ė OMG¹śėHĖŹ ĢŲ¶Ø¤Ī„Ł„󄥤¬³·ĶĖ¤·¤Ę¤ā „ę©`„¶¤ĻŹ¹¤¤¾A¤±¤ė¤³¤Č¤¬æÉÄÜ RT„ß„É„ė„¦„Ø„¢»„Qg×°¤Ļ10·NīŅŌÉĻ ĖŹ»ÆĀÄs ? 2005Äź9? Request for Proposal °k?(ĖŹ»Æé_Ź¼) ? 2006Äź9? OMG¤Ē³ŠÕJ”¢ŹĀgÉĻ¤Ī¹śėHĖŹ«@µĆ ? 2008Äź4? OMG RTCĖŹŹĖ ver.1.0¹«Ź½„ź„ź©`„¹ ? 2012Äź9? ver. 1.1øÄ¶Ø ? 2015Äź9? FSM4RTC(FSMŠĶRTC¤Č„Ē©`„æ„Ż©`„ČĖŹ) ńk 22
- 23. „ׄķ„ø„§„Æ„Č„Ś©`„ø ? „ę©`„¶¤¬?·Ö¤Ī×÷Ę· ¤ņµĒåh ? Ėū¤Ī„ę©`„¶¤Ī×÷¤Ć¤æ RTC¤ņĢ½¤¹¤³¤Č¤¬¤Ē ¤¤ė 23 „愤„× µĒåhŹż RT„³„ó„Ż©`„Ķ„ó„ČČŗ 403 RT„ß„É„ė„¦„Ø„¢ 14 „Ä©`„ė 27 ŹĖ?ĪÄų 6 „Ļ©`„É„¦„Ø„¢ 28
- 24. „µ„Ž©`„„ć„ó„× ? °ÄźĻĤĖ1ßLégé_“ß ? ½ńÄź?8?ĻĀŃ® ? ļ¼Æ?Źż?20Ćū³Ģ¶Č ? öĖł?®b¾tŃŠ¤Ä¤Æ¤Š„»„ó„æ©` ? ׳ѧ¤ČgĮ¤ņ1ßLég?¤¤”¢×īįį¤Ė ¤½¤ģ¤¾¤ģ¤¬³É¹ū¤ņ°k±ķ ? ®b¾tŃŠÄŚ¤Ī¤µ¤Æ¤éš^¤ĖĖŽ²“¤·¤Ź¤¬ ¤éŅ¹Ķؤ·?„³©`„Ē„£„ó„°¤ņ?¤¦? 24
- 25. RT„ß„É„ė„¦„Ø„¢„³„ó„Ę„¹„Č ? SICE SI £ØÓy?ÓÖĘӳѧ»į „·„¹„Ę„ą„¤„ó„Ę„°„ģ©`„·„ē„ó ²æ?ÖvŃŻ»į £©¤Ī„»„Ć„·„ē„ó¤Č¤·¤Ęé_“ß é_“ߤĪæÉ·ń¤ņŹÓÖŠ ØC ø÷·NXĄųŁp?Ė»łŹé_?:5?ķ ØC „Ø„ó„Č„ź©`©eĒŠ?SI2023¾ĒŠ ØC ÖvŃŻŌøå©eĒŠ?8?Ä©¤“¤ķ ØC „½„Õ„Č„¦„Ø„¢µĒåh?10?¤“¤ķ ØC „Ŗ„ó„鄤„óĖ?11?ĻĀŃ®? ØC °k±ķ?ŹŚŁpŹ½?12?¤“¤ķ ? 2022Äź¶Čgæ ØC źÄ¼Źż?7¼ž ØC Óy?ÓÖĘӳѧ»įѧ»įRT„ß„É„ė„¦„Ø„¢Łp £Øø±Łp10ĶņŅ£© ØC XĄųŁp£ØŁpĘ· fŁm£©?2¼ž ØC XĄųŁp£ØāĢå fŁm£©?7¼ž ØC XĄųŁp£Ø? fŁm£©?6¼ž ? Ō¼¤ĻWeb„Ś©`„ø? openrtm.org ØC „³„ß„å„Ė„Ę„£©`”ś„¤„Ł„ó„Č ¤ņ¤“ÓE¤Æ¤Ą¤µ¤¤ 25
- 26. øé°Õ°äæŖ°k¤Īg¼Ź
- 27. „Õ„ģ©`„ą„ļ©`„Æ¤Č„³„¢„ķ„ø„Ć„Æ „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó „ė„“„ź„ŗ„ą „¢ „³„¢„ķ„ø„Ć„Æ ÓŅÄæ»Ļń ×óÄæ»Ļń „Ē„ׄ¹„Ž„Ć„× RT „ó„Ż©`„Ķ„ó„Č „ģ©`„ą„ļ©`„Æ „³ „Õ RT „ó„Ż©`„Ķ„ó„Č Ź„¤„ó„æ©`„Õ„§©`„¹ „³ Ė „¹„Ę„ģ„Ŗ„Ó„ø„ē„ó RT „ó„Ż©`„Ķ„ó„Č „³ RT „ó„Ż©`„Ķ„ó„Č Ź„¤„ó„æ©`„Õ„§©`„¹ „³ Ė ÓŅÄæ»Ļń ×óÄæ»Ļń „Ē„ׄ¹„Ž„Ć„× £« £½ ÖŠÉķ¤ĻæÕ RTC„Õ„ģ©`„ą„ļ©`„Æ£«„³„¢„ķ„ø„Ć„Æ£½RT„³„ó„Ż©`„Ķ„ó„Č
- 29. „ā„Ē„ė¤Ė»ł¤Å¤Æ„³©`„ÉÉś³É 29 „³„ó„Ż©`„Ķ„ó„ČŹĖ MyComp temp.sensor device temp. sensor RTC STATIC PERIODIC mode:TimedBool temp: TimedDouble name: category: description: comp_type: act_type: InPorts: OutPorts: Template code generator C++ backend Java backend Python backend RTC-Lite backend RTC source for C++ RTC source for Java RTC source for Python RTC-Lite source for PIC C RTC-Lite proxy code class MyComp : public DataflowComponent { public: virutal onExecute(ec_id); : private: TimedBool m_mode; TimedDouble m_temp; }; import RTC.DataFlowComponent; public class MyCompImpl extends DataFlowComponent { public ConsoleInImpl(mgr) { } : }; #/usr/bin/env python import RTC class MyComp( DataFlowComponent): def __init__(self, manager): : def onExecute(self, ec_id): : #include <16f877a.h> #include "rtc_base.c”° int main (void) { rtc_connect_proxy(); rtc_mainloop(); return 0; } #/usr/bin/env python import RTC class Proxy( DataFlowComponent): def __init__(self, manager): : def onExecute(self, ec_id): : Ķ¬Ņ»¤ĪRTCŹĖ¤«¤é¤Ļ ŃŌÕZ¤¬®¤Ź¤Ć¤Ę¤¤¤Ę¤ā”¢ Ķ¬¤ø£Ø„³„ó„Ż©`„Ķ„ó„Č„ā„Ē „ė¤Ī£©RTC¤¬Éś³É¤µ¤ģ¤ė
- 31. CMake ? „³„ó„Ń„¤„é¤ĖŅĄ“ꤷ¤Ź¤¤„Ó„ė„É×ŌӻƤĪ¤æ¤į ¤Ī„Õ„ź©`„½„Õ„Č„¦„§„¢ ? ”©¤ŹOSÉĻ¤Ī”©¤Źé_°kh¾³ÓĆ„Ó„ė„É„Õ„” „¤„ė¤ņÉś³É¤¹¤ė¤³¤Č¤¬¤Ē¤¤ė ØC Linux ¤Ē¤Ļ Makefile¤ņÉś³É ØC Windows ¤Ē¤ĻVC(Visual C++)¤Ī„ׄķ„ø„§„Æ„Č„Õ „”„¤„ė¤ņÉś³É ? ×ī½ü¤Ī„Ŗ©`„ׄ󄽩`„¹„½„Õ„Č„¦„§„¢¤Ē¤Ļ CMake¤Ē„Ó„ė„ɤ¹¤ė¤č¤¦¤Ė¤Ź¤Ć¤Ę¤¤¤ė¤ā¤Ī¤¬ ¶ąŹż”£ 31
- 32. „³„ó„Ż©`„Ķ„ó„Č×÷³É¤ĪĮ÷¤ģ 32 RTBUilder CMake Visual C++ „³„ó„Ż©`„Ķ„ó„ȤĪ ŹĖ¤Ī?? VC„ׄķ„ø„§„Æ„Č„Õ„”„¤„ė ¤Ž¤æ¤ĻMakefile¤Ī?³É g×°¤Ŗ¤č¤Ó„³„ó„Ń„¤„ė g?„Õ„”„¤„ė¤Ī?³É RTBUilder CMake make + gcc (g++) Windows Linux Ķ¾ÖŠ¤Ž¤ĒĮ÷¤ģ¤ĻĶ¬¤ø”¢„³„ó„Ń„¤„餬®¤Ź¤ė
- 34. 34 34 „¢„Æ„Ę„£„Ó„Ę„£ „³©`„ė„Š„Ć„ÆévŹż IĄķ onInitialize ³õĘŚ»ÆIĄķ onActivated „¢„Æ„Ę„£„ֻƤµ¤ģ¤ė¤Č¤1¶Č¤Ą¤±ŗō¤Š¤ģ¤ė onExecute „¢„Æ„Ę„£„ÖדBr¤ĖÖÜĘŚµÄ¤Ėŗō¤Š¤ģ¤ė onDeactivated ·Ē„¢„Æ„Ę„£„ֻƤµ¤ģ¤ė¤Č¤1¶Č¤Ą¤±ŗō¤Š¤ģ¤ė onAborting ERRORדB¤ĖČė¤ėĒ°¤Ė1¶Č¤Ą¤±ŗō¤Š¤ģ¤ė onReset reset¤µ¤ģ¤ėr¤Ė1¶Č¤Ą¤±ŗō¤Š¤ģ¤ė onError ERRORדB¤Ī¤Č¤¤ĖÖÜĘŚµÄ¤Ėŗō¤Š¤ģ¤ė onFinalize ½KĮĖr¤Ė1¶Č¤Ą¤±ŗō¤Š¤ģ¤ė onStateUpdate onExecute¤Īįį°»Ųŗō¤Š¤ģ¤ė onRateChanged ExecutionContext¤Īrate¤¬äøü¤µ¤ģ¤æ¤Č¤1¶Č¤Ą ¤±ŗō¤Š¤ģ¤ė onStartup ExecutionContext¤¬gŠŠ¤ņé_Ź¼¤¹¤ė¤Č¤1¶Č¤Ą ¤±ŗō¤Š¤ģ¤ė onShutdown ExecutionContext¤¬gŠŠ¤ņĶ£Ö¹¤¹¤ė¤Č¤1¶Č¤Ą ¤±ŗō¤Š¤ģ¤ė
- 35. InPort ? InPort¤Ī„Ę„ó„ׄģ©`„ȵŚ2ŅżŹż£ŗ„Š „Ć„Õ„” ØC „ę©`„¶¶ØĮx¤Ī„Š„Ć„Õ„”¤¬ĄūÓĆ æÉÄÜ ? InPort¤Ī„į„½„Ć„É ØC read(): InPort „Š„Ć„Õ„”¤«¤é „Š„¤„ó„ɤµ¤ģ¤æ䏿¤Ų×īŠĀ ¤ņÕi¤ßŽz¤ą ØC >> : ¤¢¤ė䏿¤Ų×īŠĀ¤ņÕi ¤ßŽz¤ą „ź„ó„°„Š„Ć„Õ„” „Š„¤„ó„ɤµ¤ģ¤æ䏿 read() ! " # $ % & ! $ ' ' ×īŠĀ InPort Robot Component Sensor Data Ąż »ł±¾µÄ¤ĖOutPort¤Č¤Ė¤Ź¤ė „Ē©`„æ„Ż©`„ȤĪŠĶ¤ņ Ķ¬¤ø¤Ė¤¹¤ė±ŲŅŖ¤¢¤ź
- 36. OutPort ? OutPort¤Ī„Ę„ó„ׄģ©`„ȵŚ2ŅżŹż£ŗ „Š„Ć„Õ„” ØC „ę©`„¶¶ØĮx¤Ī„Š„Ć„Õ„”¤¬ĄūÓĆ æÉÄÜ ? OutPort¤Ī„į„½„Ć„É ØC write(): OutPort „Š„Ć„Õ„”¤Ų „Š„¤„ó„ɤµ¤ģ¤æ䏿¤Ī×īŠĀ ¤Č¤·¤Ęų¤Žz¤ą ØC >> : ¤¢¤ė䏿¤ĪÄŚČŻ¤ņ×īŠĀ ¤Č¤·¤Ę„ź„ó„°„Š„Ć„Õ„”¤Ėų¤ Žz¤ą „ź„ó„°„Š„Ć„Õ„” „Š„¤„ó„ɤµ¤ģ¤æ䏿 ! " # $ % () & ' % " ( $ & " ) ) * + $ Port ×īŠĀ Sensor Component Sensor Data Ąż »ł±¾µÄ¤ĖInPort¤Č¤Ė¤Ź¤ė „Ē©`„æ„Ż©`„ȤĪŠĶ¤ņ Ķ¬¤ø¤Ė¤¹¤ė±ŲŅŖ¤¢¤ź
- 37. PushŠĶ„Ē©`„æ„Ż©`„Č„ā„Ē„ė ? Connector ØC gėH¤Ė¤Ļég¤ĖĶ؊Ť¬Čė ¤ėæÉÄÜŠŌ¤¬¤¢¤ė ? 3¤Ä¤ĪĖĶŠÅ„ā„Ē„ė ØC ”°new”±,”°periodic”±,”°flush”± ØC „Ń„Ö„ź„Ć„·„ć¤Ė¤č¤ėg¬F ? „Š„Ć„Õ„””¢„Ń„Ö„ź„Ć„·„ć”¢ ĶØŠÅ„¤„ó„æ©`„Õ„§©`„¹¤Ī 3¤Ä¤ņConnector¤ĖÄŚ °ü 37 „Ķ„Ć„Č„ļ©`„ÆµČ¤Ė¤č¤ėĶØŠÅ
- 38. „µ©`„Ó„¹„Ż©`„Č „ׄķ„Š„¤„Ą ? „¤„ó„æ©`„Õ„§©`„¹¤Īg×° ? „³„ó„Ż©`„Ķ„ó„ȤĖ½M¤ßŽz¤ą£Ø Šū?£© ? Port¤Ų¤Ī„Š„¤„ó„É „³„ó„·„å©`„Ž ? „¹„æ„Ö¤ņ½M¤ßŽz¤ą ? „³„ó„·„å©`„Ž¤ņŠū? ? Port¤Ų¤Ī„Š„¤„ó„É „µ©`„Ó„¹?¤Ī„¤„ó„æ©`„Õ„§©`„¹(IDL)¤ņ¶ØĮx¤¹¤ė RTCBuilder¤Ē„³„ó„Ż©`„Ķ„ó„Ȥņ×÷¤ģ¤ŠÉĻÓ¤Ī¤³¤Č ¤ņ¤Ū¤Č¤ó¤ÉŻ¤Ė¤·¤Ź¤¤¤Ē×÷¤ģ¤ė ?Ķ¾?Ėū¤Ī„³„ó„Ż©`„Ķ„ó„ȤĪĢį¹©¤¹¤ė„µ©`„Ó„¹¤ņ±ŲŅŖ¤Ź¤Č¤¤Ą¤±Ąū?¤·¤æ¤¤r Ąż?„«„į„餫¤é¤Ī»Ļń¤ĪČ”µĆ
- 40. Ģį? ? ?Ē°Ö÷Įx¤Ļ¤ä¤į¤č¤¦?? ØC ų¤¤æ¤Ę¤Ī„³©`„ɤ褟”¢¤¤¤ķ¤¤¤ķ¤Ź?¤ĖŗĪĶņ»Ų¤āg?¤µ¤ģ¤æ„³ ©`„ɤĪ¤Ū¤¦¤¬Ó¤Æ„³©`„ɤĒ¤¢¤ė?? ØC ?·Ö¤Ė¤Č¤Ć¤Ę±¾Ł|µÄ¤Ē¤Ź¤¤²æ·Ö¤ĻČĪ¤»¤Ę”¢±¾µ±¤Ė¤ä¤ź¤æ¤¤²æ·Ö ?¤ä¤ė¤Ł¤²æ·Ö¤Ī„³©`„ɤņų¤³¤¦?? ØC Õl¤«¤¬„ź„ź©`„¹¤·¤æ„ׄķ„°„é„ą¤Ļ?¶Č¤ĻÓ¤¤¤æ¤³¤Č¤¬¤¢¤ė„ׄķ „°„é„ą¤Ē¤¢¤ė?? ØC ?¤Ī„³©`„ɤņÕi¤ą¤Ī¤¬?µ¹¤Ą¤«¤é¤ČĪ¤Ę¤Ę¤·¤Ž¤¦¤Ī¤Ļ¤ā¤Ć¤æ¤¤ ¤Ź¤¤?? ? „Ŗ©`„ׄ󄽩`„¹¤Ė„³„߄ƄȤ·¤č¤¦?? ØC Ņܤ»¤ŗML¤ä„Õ„©©`„é„ą¤ĒŁ|¤·¤č¤¦?? ØC ¤É¤ó¤Ź¤Ė³õiµÄ¤ŹŁ|¤Ē¤āĖū¤Ī?¤Ė¤Č¤Ć¤Ę¤Ļż¤¢¤ėĒéó¤Ē¤¢ ¤ė”£ ØC ŅŖĶū¤ņ·eOµÄ¤Ė¤¢¤²¤č¤¦?? ØC ¤Ē¤¤ģ¤Š„Ē„Š„Ć„°¤·¤Ę„Ń„Ć„Į¤ņĖĶ¤ķ¤¦? 40
- 41. ¤Ž¤Č¤į ? RT„ß„É„ė„¦„Ø„¢¤ĪøÅŅŖ ØC »ł±¾øÅÄī ØC „ā„ø„å©`„ė»Æ ØC ĖŹ»Æ ØC RTM„³„ß„å„Ė„Ę„£©` ? øé°Õ°äæŖ°k¤Īg¼Ź ØC „Ę„ó„ׄģ©`„Č?³É”śg×° ØC „Ē©`„æ„Ż©`„Č”¢„µ©`„Ó„¹„Ż©`„Č 41
- 42. 42
- 43. „Ē©`„æ䏿 struct TimedShort { Time tm; short data; }; struct TimedShortSeq { Time tm; sequence<short> data; }; ? »ł±¾ŠĶ ØC tm£ŗræĢ ØC data: „Ē©`„椽¤Ī¤ā¤Ī ? „·©`„±„󄹊Ķ ØC data[i]: Ģķ¤Ø×Ö¤Ė¤č¤ė„¢„Æ„»„¹ ØC data.length(i): éL¤µi¤ņ“_±£ ØC data.length(): éL¤µ¤ņČ”µĆ ? „Ē©`„æ¤ņČė¤ģ¤ė¤Č¤¤Ė¤Ļ¤¢¤é¤«¤ø¤į éL¤µ¤ņ„»„ƄȤ·¤Ź¤±¤ģ¤Š¤Ź¤é¤Ź¤¤”£ ? CORBA¤Ī„·©`„±„󄹊Ķ¤½¤Ī¤ā¤Ī ? ½ńįįäøü¤µ¤ģ¤ėæÉÄÜŠŌ¤¢¤ź 0.2.0¤Ē¤Ļ×ŌÓ¤Ē¬FŌŚræĢ¤ņ „»„ƄȤ·¤Ę¤¤¤æ¤¬”¢0.4.0¤Ē¤Ļ ±ŲŅŖ¤Ėź¤ø¤Ę”¢ŹÖÓ¤Ē„»„Ć„Č ¤¹¤ė±ŲŅŖ¤¢¤ź
- 44. „Ē©`„æ„Ż©`„Č„ā„Ē„ė ? Connector: ØC „Š„Ć„Õ„”¤ČĶØŠÅĀ·¤ņ³éĻó»Æ¤·¤æ„Ŗ„Ö„ø„§„Æ„Č”£OutPort¤«¤é„Ē©`„æ¤ņŹÜ¤±Č”¤ź„Š „Ć„Õ„”¤Ėų¤Žz¤ą”£InPort¤«¤é¤ĪŅŖĒó¤Ė¾¤¤„Š„Ć„Õ„”¤«¤é„Ē©`„æ¤ņČ”¤ź³ö¤¹”£ ØC OutPort¤Ė¤·¤Ę„Š„Ć„Õ„”„Õ„ė?„愤„ą„¢„¦„ȵȤĪ„¹„Ę©`„愹¤ņ»¤Ø¤ė”£ ØC InPort¤Ė¤·¤Ę„Š„Ć„Õ„”„Ø„ó„ׄʄ£?„愤„ą„¢„¦„ȵȤĪ„¹„Ę©`„愹¤ņ»¤Ø¤ė”£ ? OutPort: ØC „¢„Æ„Ę„£„Ó„Ę„£¤«¤é¤ĪŅŖĒó¤Ė¤č¤Ć¤Ę„Ē©`„æ¤ņ„³„Ķ„Æ„æ¤Ėų¤Žz¤ą„Ŗ„Ö„ø„§„Æ„Č ? InPort: ØC „¢„Æ„Ę„£„Ó„Ę„£¤«¤é¤ĪŅŖĒó¤Ė¤č¤Ć¤Ę„Ē©`„æ¤ņ„³„Ķ„Ƅ椫¤éÕi¤ß³ö¤¹„Ŗ„Ö„ø„§„Æ„Č 44 notify full/timeout status notify empty/timeout status
- 45. Push„Ż„ź„·©` ? „Š„Ć„Õ„”²ŠĮō„Ē©`„æ ØC ĖĶ¤ź·½¤Ī„Ż„ź„· ØC „Ē©`„æÉś³É?ĻūŁMĖŁ¶Č¤ņ æ¼]¤·¤ĘŌO¶Ø¤¹¤ė±ŲŅŖ ¤¬¤¢¤ė”£ „Ż„ź„· ĖĶ¤ź·½ ALL Č«²æĖĶŠÅ FIFO ĻČČė¤ģįį¤Ą¤·¤Ē1¤ŗ¤ÄĖĶŠÅ NEW ×īŠĀ¤Ī¤ßĖĶŠÅ SKIP n¤Ŗ¤¤ĖégŅż¤¤¤ĘĖĶŠÅ 45 Óčøå¤Ė¤ĻNEW¤ĪÕhĆ÷¤ĖLIFO¤ČÓŹö¤·¤Ę¤¤¤Ž¤·¤æ¤¬Õż“_¤Ė¤Ļ LIFO¤Ē¤Ļ¤Ź¤Æ×īŠĀ¤Ī¤ß¤ĪĖĶŠÅ¤Ē¤¹”£LIFOŠĪŹ½¤Ī„Ż„ź„·¤ņ §Čė¤¹¤ė¤«¤É¤¦¤«¤ĻŹÓÖŠ¤Ē¤¹”£¤“ŅāŅ¤Æ¤Ą¤µ¤¤”£ ALL FIFO NEW SKIP
- 46. IDL¤Čg×° interface MyRobot { // „²„¤„ó¤ņ„»„ƄȤ¹¤ė void setPosCtrlGain(in short axis, in double gain); // „²„¤„ó¤ņČ”µĆ¤¹¤ė double getPosCtrlGain(in int axis); }; class MyRobot_impl { /* ¤³¤ĪĄż¤Ē¤Ļm_robo ¤Ļ„ķ„܄ƄȤņgėH¤ĖÖĘÓł¤¹¤ė * „Ƅ鄹¤Ī„¤„󄹄æ„󄹤Ē¤¢¤ė¤Č¢¶Ø¤¹¤ė. */ void setPosCtrlGain(const int axis, const double gain) { // Ī»ÖĆÖĘÓł„²„¤„ó¤ņŌO¶Ø m_robo.set_pos_ctrl_gain(axis, gain); } /* ÖŠĀŌ*/ }; IDL(CORBA)¶ØĮx „µ©`„Ó„¹g×°(ėrŠĪ¤Ļrtc-template¤Ė¤č¤ė×ŌÓÉś³É)
- 47. „µ©`„Ó„¹„ׄķ„Š„¤„Ą?„³„ó„·„å©`„Ž class MyRoboComponent { private: // MyRobot „µ©`„Ó„¹¤Ī„Ż©`„ȤņŠūŃŌ RTC::CorbaPort m_port; // MyRobot „µ©`„Ó„¹¤Ī„¤„󄹄æ„󄹤ņŠūŃŌ MyRobot_impl m_robot; public: ManipulatorComponent(Manager manager) { // „Ż©`„ȤĖ„µ©`„Ó„¹¤ņµĒåh m_port.registerProvider("Robo0", "MyRobot", m_robot); // „Ż©`„Ȥņ„³„ó„Ż©`„Ķ„ó„ȤĖµĒåh registerPort(m_port); } class MyRobotUser { private: // „Ž„Ė„Ō„å„ģ©`„愵©`„Ó„¹¤Ī„Ż©`„ȤņŠūŃŌ RTC::CorbaPort m_port; // „µ©`„Ó„¹„³„ó„·„å©`„Ž¤Ī„¤„󄹄æ„󄹤ņŠūŃŌ RTC::CorbaConsumer<MyRobot> m_robot; public: any_functions() {// „µ©`„Ó„¹¤ĪĄūÓĆĄż // „²„¤„ó¤ņ„»„Ć„Č m_robot->setPosCtrlGain(0, 1.0); // „²„¤„ó¤ņ±ķŹ¾ std::cout << m_robot->get_pos_ctrl_gain(i) << std::endl; } } MyRobot Service Provider MyRobot Service Consumer Port ¤č¤źŌ¼¤Źg×°¤Ė¤Ä¤¤¤Ę¤Ļ”¢ „µ„ó„ׄė¤ĪSimpleService¤ņ²ĪÕÕ
- 48. Configuration¤Īg×°Ąż „Ų„Ć„Ą 䏿ŠūŃŌ int m_int_param0; double m_double_param0; g×°„Õ„”„¤„ė ĻČī^²æ·Ö£ŗspec¶ØĮx¤Ė¤Ę static const char* configsample_spec[] = { :ÖŠĀŌ "conf.default.int_param0", ”°0", "conf.default.double_param0", ”°1.1", :ÖŠĀŌ}; onInitialize()¤Ė¤Ę bindParameter(”°int_param0”±, m_int_param0, ”°0”±); bindParameter(”°double_param0”±, m_double_param0, ”°1.1”±); istream operator>>¤¬ ¶ØĮx¤µ¤ģ¤Ę¤¤¤ėŠĶ¤Ē¤¢ ¤ģ¤Š¤É¤ó¤ŹŠĶ¤Ē¤āæÉÄÜ
- 49. Configuration ĆūĒ° default ĆūĒ° mode0 ĆūĒ° mode1 rtc-template¤Ē×ŌӵĤĖÉś ³É¤µ¤ģĀń¤įŽz¤Ž¤ģ¤ė rtc.conf¤Ė¤Ę : ĀŌ category.component.config_file: comp.conf £ŗĀŌ comp.conf¤Ė¤Ę conf.mode0.int_param0: 2 conf.mode0.double_param0: 3.14 conf.mode1.int_param0:3 conf.mode1.double_param0: 6.28 conf.mode2.int_param0:4 conf.mode2.double_param0: 12.56 ĆūĒ° mode2 „³„ó„Ż©`„Ķ„ó„ȤĪconfig„Õ„”„¤„ė¤Ē ×·¼Ó¤¹¤ė¤³¤Č¤ā¤Ē¤¤ė”£ £Ødefault„»„Ć„ČĶ¬„½©`„¹¤ĖĀń¤įŽz ¤ą¤³¤Č¤āæÉÄÜ£©