








1 information sheet template
- 1. JABATAN PEMBANGUNAN KEMAHIRAN KEMENTERIAN SUMBER MANUSIA ARAS 7 & 8 BLOK D4, KOMPLEKS D PUSAT PENTADBIRAN KERAJAAN PERSEKUTUAN 62502 PUTRAJAYA KERTAS PENERANGAN KOD DAN NAMA PROGRAM / PROGRAM H-176-2 AUTOMATION TECHNICIAN CODE AND NAME TAHAP / LEVEL DUA (2) NO DAN TAJUK MODUL / M08 ROBOT MAINTENANCE MODULE NO AND TITLE 1.1 ROBOT TERMINOLOGY AND SYMBOLS 1.2 ROBOT SPECIFICATION AND SCHEMATIC/ BLOCK NO DAN PERNYATAAN TUGASAN / TASK(S) NO DIAGRAM AND STATEMENT 1.3 ROBOT FUNCTIONS 1.4 PROGRAMMING LANGUAGE NO. PENGALAMAN LE 01 IDENTIFY TYPE OF ROBOT PEMBELAJARAN / NO. LE 02 CHECK ROBOT CONDITION AND LEARNING LE 03 RECORD ROBOT CONDITION EXPERIENCE / STEPS PERFORM ROBOT MAINTENANCE USING STANDARD OPERATING PROCEDURE, ROBOT MANUFACTURERŌĆÖS SPECIFICATION, MEASURING AND TEST INSTRUMENTS, SCHEMATIC/BLOCK DIAGRAM, ROBOT PROGRAMMING LANGUAGE, ROBOT PROGRAMMING MANUALS AND DATA OBJEKTIF MODUL / MODULE OBJECTIVE BOOK, LOGBOOK, CHECKLIST, HAND TOOLS, SPECIAL TOOLS, REPORT FORMS SO THAT TYPES OF ROBOT IDENTIFIED, ROBOT CONDITION CHECKED AND RECORDED IN ACCORDANCE WITH JOB SPECIFICATION REQUIREMENTS AND STANDARD OPERATING PROCEDURES. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka : 01 Drp : 14 TAJUK : PENGENALAN KEPADA ROBOT TUJUAN : kertas penerangan ini adalah bertujuan untuk menjelaskan terminologi dan symbol robot,spesifikasi dan
- 2. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 02 Drp: 13 skematik robot, fungsi setiap robot dan bahasa pengaturcaraan robot. PENERANGAN : 1. TERMINOLOGI DAN SIMBOL ROBOT a) Pengenalan Robot Definisi robot adalah sebuah peranti atau alat pelbagai fungsi yang boleh di programkan berulang kali. Ia di reka bentuk untuk mengerakkan serta mengolah bahagian-bahagian, alat-alat atau alat khusus dalam kerja-kerja pembuatan melalui pergerakan yang boleh di ubah-bah untuk melakukan tugas-tugas di dalam proses. Selain itu, ia juga di kenali sebagai sebuah mesin yang boleh di atucara semula yang memiliki beberapa darjah kebebasan DEGREE OF FREDOM (DOF) dan berkeupayaan berkomunikasi dengan peranti-peranti pengautomatan yang lain b) Sejarah dan perkembangan robot Pembinaan robot telah melalui siri sejarah yang sangat lama. Ia bermula dengan sebuah idea pada tahun 1920-an sehinggalah menjadi kompleks pada hari ini. Tahun 1920 Istilah robot pertama kali digunakan pada tahun 1920 oleh penulis Czech Karel Capek (dibaca ŌĆ£ChopŌĆÖekŌĆØ) dengan karyanya ŌĆ£R.U.RŌĆØ atau RossumŌĆÖs Universal Robot dimana seorang lelaki membuat robot dan robot membunuh penciptanya. Tidak lama kemudian, banyak filem telah menggambarkan robot sebagai alat yang tidak bersahabat atau alat yang bertindak sebagai mesin perosak yang berlawanan dengan arti robot (robota) dalam bahasa Czech yang bererti pekerja paksa. Tahun 1941 Pada tahun 1941, barulah istilah robotics digunakan dalam teknologi robot oleh penulis fiksyen ilmiah Isaac Asimov. Dia telah membayangkan akan munculnya robot-robot industri canggih pada masa akan datang. Jika kita lihat hari ini, maka apa yang dibayangkan olehnya terbukti dimana begitu pesatnya perkembangan robot-robot industri ketika ini. Istilah revolusi robot, robot age atau era robot sudah menjadi kebiasaan untuk menjelaskan perkembangan itu. Robotics diterima sebagai istilah atau kata untuk mendeskripsikan semua kemajuan teknologi yang berhubungan dengan robot. Tahun 1956 Georde Devil dan Joseph Engelberger membentuk perusahaan robot pertama kali pada tahun 1956. Devil menjangkakan robot akan menjadi bahagian penting di industri sebagai operator fabrikasi dan membantu pekerja dalam menjalankan mesin-mesin fabrikasi. Beberapa tahun kemudian atau tepatnya 1961, General Motor pertama kali menggunakan robot untuk fabrikasi automotifnya. Robot industri kemudian berkembang dan mulai banyak digunakan tahun 1980 oleh perusahaan selain otomotif dimana perkembangan elektronik dan komputer membuat robot moden lahir. Awal 70an Beberapa filem terkenal seperti Star Wars pada tahun1977 telah menampilkan robot C3PO dan R2D2. Robot ini telah ditampilkan sebagai robot pembantu manusia sekaligus juga musuh manusia. Dalam filem ini, telah kelihatan robot yang menyerupai manusia atau istilahnya ŌĆ£AndroidŌĆØ buat pertama kalinya. Rajah 2.0 : Robot Android pertama diperkenalkan dalam filem Star Wars Awal 80an Industri automotif telah membuat pelaburan yang besar dalam kajian robot. Namun, perlaksanaan robot diindustri telah gagal pada peringkat awal. Ini kerana manusia pada ketika itu belum bersedia ŌĆ£berkawanŌĆØ dengan robot sepenuhnya, sistem robot yang
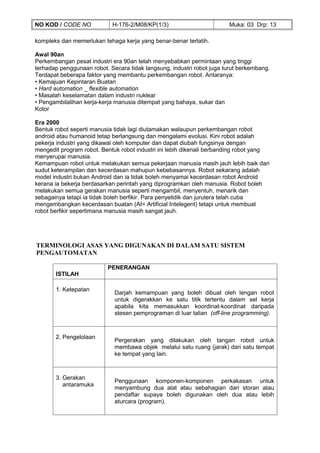
- 3. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 03 Drp: 13 kompleks dan memerlukan tehaga kerja yang benar-benar terlatih. Awal 90an Perkembangan pesat industri era 90an telah menyebabkan permintaan yang tinggi terhadap penggunaan robot. Secara tidak langsung, industri robot juga turut berkembang. Terdapat beberapa faktor yang membantu perkembangan robot. Antaranya: ŌĆó Kemajuan Kepintaran Buatan ŌĆó Hard automation _ flexible automation ŌĆó Masalah keselamatan dalam industri nuklear ŌĆó Pengambilalihan kerja-kerja manusia ditempat yang bahaya, sukar dan Kotor Era 2000 Bentuk robot seperti manusia tidak lagi diutamakan walaupun perkembangan robot android atau humanoid tetap berlangsung dan mengalami evolusi. Kini robot adalah pekerja industri yang dikawal oleh komputer dan dapat diubah fungsinya dengan mengedit program robot. Bentuk robot industri ini lebih dikenali berbanding robot yang menyerupai manusia. Kemampuan robot untuk melakukan semua pekerjaan manusia masih jauh lebih baik dari sudut keterampilan dan kecerdasan mahupun kebebasannya. Robot sekarang adalah model industri bukan Android dan ia tidak boleh menyamai kecerdasan robot Android kerana ia bekerja berdasarkan perintah yang diprogramkan oleh manusia. Robot boleh melakukan semua gerakan manusia seperti mengambil, menyentuh, menarik dan sebagainya tetapi ia tidak boleh berfikir. Para penyelidik dan jurutera telah cuba mengembangkan kecerdasan buatan (AI= Artificial Intelegent) tetapi untuk membuat robot berfikir sepertimana manusia masih sangat jauh. TERMINOLOGI ASAS YANG DIGUNAKAN DI DALAM SATU SISTEM PENGAUTOMATAN PENERANGAN ISTILAH 1. Ketepatan Darjah kemampuan yang boleh dibuat oleh lengan robot untuk digerakkan ke satu titik tertentu dalam sel kerja apabila kita memasukkan koordinat-koordinat daripada stesen pemprograman di luar talian (off-line programming). 2. Pengelolaan Pergerakan yang dilakukan oleh tangan robot untuk membawa objek melalui satu ruang (jarak) dari satu tempat ke tempat yang lain. 3. Gerakan Penggunaan komponen-komponen perkakasan untuk antaramuka menyambung dua alat atau sebahagian dari storan atau pendaftar supaya boleh digunakan oleh dua atau lebih aturcara (program).
- 4. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 04 Drp: 13 Isipadu/luas kawasan di mana lengan robot boleh 4. Liputan kerja melakukan tugasnya/kerjanya. Bilangan pergerakan hakiki dan tahap kompleksnya tugas 5. Darjah - yang boleh dilakukan oleh sebuah robot ditentukan oleh darjah kebebasan yang ada pada sesuatu robot. Pada kebebasan amnya robot mempunyai tiga darjah kebebasan utama iaitu paksi x,y dan z. Robot-robot yang lebih canggih mempunyai (D.O.F) paksi gerakan yang lebih banyak. Pergerakan robot melalui satu garislurus yang melibatkan 6. Peralihan pengawalan lebih dari satu paksi. Sendi atau paksi yang terdapat pada pengolah (lengan 7. Persendian robot). Terdiri dari dua jenis axis iaitu ŌĆśmajor axisŌĆÖ yang terdiri dari ŌĆśbaseŌĆÖ, ŌĆśshoulderŌĆÖ dan ŌĆśelbowŌĆÖ serta ŌĆśminor axisŌĆÖ (JOINT) yang terdiri dari ŌĆś wrist pitchŌĆÖ, ŌĆśwrist rollŌĆÖ dan ŌĆśwrist yawŌĆÖ. Pergerakan ŌĆśend effectorŌĆÖ robot ataupun ŌĆśminor axisŌĆÖ untuk 8. Penghalaan pergi ke tempat yang di arahkan. Rekabentuk robot mengikut pandangan geometrinya 9. Tatarajah contohnya kartesian, selinder, polar dan lengan bersambung (jointed arm). Darjah kemampuan lengan robot untuk mengesan sasaran 10. Keboleh- yang telah disetkan dengan tepat dan kemudian kembali semula ke titik asalnya dalam sel kerja itu. Robot yang ulangan mempunyai kebolehulangan yang tinggi akan mampu mengulangi semula tugas itu dengan tepat berulang-ulang kali tanpa ralat. Ia adalah titik tindakan untuk matalat yang dipasang pada 11. Titik tengah pelit matalat robot. Titik tengah matalat ialah titik rujukan pada matalat yang dikawal oleh robot. matalat (TCP)
- 5. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 05 Drp: 13 Titik-titik yang diprogramkan dalam sel kerja dikenalpasti kedudukannya dengan menggunakan nilai-nilai koordinat- koordinat x, y dan z bagi titik tengah matalat serta sudut- 12. Koordinat- koordinat sudut penyambungan paksi pada pergelangan lengan robot sel kerja iaitu ŌĆśpitchŌĆÖ,ŌĆÖrollŌĆÖ dan ŌĆśyawŌĆÖ. Kadar pergerakan titik-tengah matalat yang dilakukan oleh 13. Kelajuan robot di bawah kawalan program. Ia adalah ukuran kelajuan alat tersebut. Beban maksima yang boleh digerakkan/dipindahkan oleh 14. Beban robot semasa di bawah kawalan program. Ia meliputi berat pencengkam dan produk/komponen yang diangkat. Semasa maksimum menggangkat beban ini lengan robot masih lagi dapat mengekalkan spesifikasi kebolehulangan dan keboleharapannya. Bahagian mekanikal sistem robot yang boleh digerakkan ke 15. Pengolah pelbagai arah, hasil dari gabungan pergerakaan paksi-paksi. Ia terdiri dari komponen-komponen seperi lengan manusia iaitu lengan atas dan lengan bawah yang disambung (manipulator) dengan ŌĆśbaseŌĆÖ, ŌĆśshoulderŌĆÖ, ŌĆśelbowŌĆÖ dan ŌĆśwristŌĆÖ. Ia dapat membawa alat pengesan hujung (end effector) ke destinasi- destinasi yang diperlukan. Selain dari komponen-komponen di atas, ia juga terdiri dari bahagian-bahagian seperti alas, pemacu penggerak, peranti suapbalik dan struktur penyokong untuk memegang serta menggabungkan semula alat-alat tersebut. Mekanisma yang digunakan untuk memacu pengolah bagi 16. Penggerak membolehkannya bergerak ke titik yang telah ditentukan. Ia terdiri daripada komponen-komponen seperti selinder (actuator) pneumatik atau hidraulik, motor-motor berputar pneumatik atau hidraulik dan motor-motor elektrik. Kedudukan robot juga ditentukan dengan gabungan komponen-komponen ini. Robot-robot yang mempunyai sistem penggerak yang mudah digerakkan secara mekanikal dengan menggunakan sesondol (cam).
- 6. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 06 Drp: 13 Perkakasan yang dipasang pada plet hujung lengan 17.Pengesan pengolah yang berfungsi mengikut tugas yang akan hujung dilakukan. Ia terdiri dari dua bentuk utama iaitu pencengkam ataupun perkakasan ( end- effector) ( tools). c) Undang-undang robot Asimov mencadangkan 3 "Undang-undang Robotik" yang juga dikenali sebagai "Piagam Zeroth" : Piagam Sifar - sesebuah robot tidak boleh mencederakan tamaddun/peradaban kemanusiaan atau bertindak (secara tidak betul), yang menyebabkan kecederaan kepada tamaddun kemanusiaan. Piagam Satu - sesebuah robot tidak boleh mencederakan manusia atau bertindak (secara tidak betul), yang menyebabkan kecederaan kepada manusia, (melainkan secara yang dibenarkan oleh undang-undang) Piagam Kedua - sesebuah robot perlu mematuhi arahan yang diberikan oleh manusia, kecuali arahan berkenaan bertentangan dengan undang-undang. Piagam Ketiga - sesebuah robot perlu melindungi dirinya selagi tidak bertentangan dengan undang- undang. 2. SPESIFIKASI DAN BLOK DIAGRAM/SKEMATIK ROBOT Jenis,spesifikasi dan skematik bagi robot ŌĆó Konfigurasi robot merupakan gabungan beberapa jenis pergerakan yg terdapat pada joints ŌĆó 4 konfigurasi asas ŌĆó Carteisan ŌĆó Cylindircal ŌĆó Spherical ŌĆó Articulated ŌĆó Menghasilkan ruang kerja yang berbeza bagi setiap konfigurasi ŌĆó Pemilihan konfigurasi haruslah sesuai dgn kerja yang harus dilakukan oleh robot Carteisan -Rectangular/Gantry/Rectilinear,XYZ -Melibatkan 3 linear joints (LLL) utk memposisikan end effector -Menggunakan tiga sliders yang bersudut tegak utk menghasilkan pergerakan x,y dan z -Membentuk ruang kerja bersegiempat.
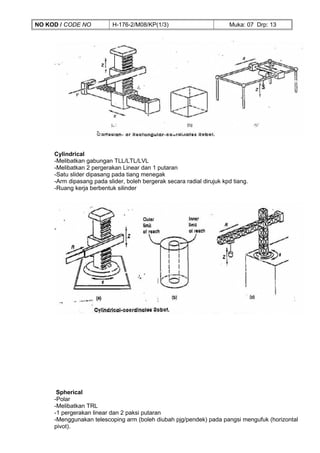
- 7. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 07 Drp: 13 Cylindrical -Melibatkan gabungan TLL/LTL/LVL -Melibatkan 2 pergerakan Linear dan 1 putaran -Satu slider dipasang pada tiang menegak -Arm dipasang pada slider, boleh bergerak secara radial dirujuk kpd tiang. -Ruang kerja berbentuk silinder Spherical -Polar -Melibatkan TRL -1 pergerakan linear dan 2 paksi putaran -Menggunakan telescoping arm (boleh diubah pjg/pendek) pada pangsi mengufuk (horizontal pivot).
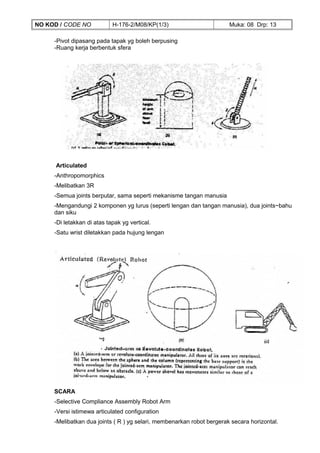
- 8. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 08 Drp: 13 -Pivot dipasang pada tapak yg boleh berpusing -Ruang kerja berbentuk sfera Articulated -Anthropomorphics -Melibatkan 3R -Semua joints berputar, sama seperti mekanisme tangan manusia -Mengandungi 2 komponen yg lurus (seperti lengan dan tangan manusia), dua joints~bahu dan siku -Di letakkan di atas tapak yg vertical. -Satu wrist diletakkan pada hujung lengan SCARA -Selective Compliance Assembly Robot Arm -Versi istimewa articulated configuration -Melibatkan dua joints ( R ) yg selari, membenarkan robot bergerak secara horizontal.
- 9. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 09 Drp: 13 -Tambahan satu joint (P) yg bergerak secara vertical -Ruang kerja hampir sama dengan cylindrical tetapi paksi capaian berjenis sendi putaran dalam permukaan yg rata dan selari di atas lantai 3. KELEBIHAN,KEKURANGAN DAN FUNGSI SETIAP ROBOT Carteisan ŌĆó Kelebihan ŌĆó Mudah divisualkan kerana bergerak dalam 3 arah yg linear ŌĆó Mampu utk membuat straight-line insertions. ŌĆó Struktur yg keras dan tegap ŌĆó Mudah diprogramkan walaupun secara offline ŌĆó Paksi linear memudahkan pemberhentian pergerakan mekanikal ŌĆó Kekurangan ŌĆó Memerlukan ruang kerja yang luas ŌĆó Paksi agar sukar untuk diubah ŌĆó Capaian hanya terhad dibahagian hadapan ŌĆó Aplikasi ŌĆó Struktur yg rigid, boleh manipulasi beban yg tinggi utk operasi pick-and-place, machine tool loading, dan sebarang aplikasi yg byk menggunakan pergerakan pada paksi x,y dan z ŌĆó Juga digunakan di dalam assembly (electronics parts insertion) dan juga pengukuran Cylindrical ŌĆó Kelebihan ŌĆó Mudah divisualkan ŌĆó Mudah diprogramkan
- 10. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 010 Drp: 13 ŌĆó Boleh mempuat capaian yg mudah ke atas cavities dan bukaan mesin ŌĆó Struktur yg agak rigid, memberikan kebolehan utk mengangkat beban yg berat melalui ruang kerja yg luas ŌĆó Kekurangan ŌĆó Tidak dapat mencapai/bergerak di atas daripada badan. ŌĆó Tapak paksi putaran kurang tegap berbanding paksi linear. ŌĆó Ruang kerja yang agak terhad ŌĆó Aplikasi ŌĆó Kerap digunakan di dalam operasi pick-and-place ŌĆó materials handling. Spherical ŌĆó kelebihan ŌĆó Boleh menjana ruang kerja yg agak besar ŌĆó Capaian horinzontal (melintang yang panjang) ŌĆó Kekurangan ŌĆó Pergerakan sukar divisual dan dikawal ŌĆó Membuat capaian secara tegak dan pendek ŌĆó Aplikasi ŌĆó Loading and unloading of a punch press ŌĆó Spotwelding ŌĆó Assembly Articulated ŌĆó Kelebihan ŌĆó Mempunyai 3 paksi pergerakan putaran. (max felxibility) ŌĆó Boleh bergerak/mencapai atas dan bawah halangan. ŌĆó Beban kerja yang banyak/besar untuk ruang kerja yang kecil. ŌĆó 2 atau 4 cara/laluan untuk mencapai satu tittik ŌĆó Kelemahan ŌĆó Agak sukar diprogramkan secara off-line. ŌĆó Sukar utk divisualkan ŌĆó Aplikasi ŌĆó Paling banyak digunakan di dalam industri ŌĆó Spray painting and weld sealing 4. PENJELASAN TENTANG BAHASA DAN PENGATURCARAAN ROBOT ŌĆó Terdapat beberapa cara utk melakukan pengaturcaraan bergantung kepada robot dan tahap sofistikatednya. Antara kaedah/mode:
- 11. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 011 Drp: 13 ŌĆó Physical Setup ŌĆó Leadthrough Programming ŌĆó Continuous-path Playback ŌĆó Offline Programming ŌĆó Software ŌĆó Kebanyakan robot industri boleh diprogramkan menggunakan lebih dari satu mode Physical Setup ŌĆó Mechanical Programming ŌĆó Operator sets up swtiches dan hard stops yg mengawal pergerakan robot ŌĆó Mode ini digunakan bersama Programmable Logic Controllers (PLC) Pedal switches Limit switches Leadthrough Programming ŌĆó RobotŌĆÖs joints digerakkan bersama teach pendant ŌĆó Bila sampai pada lokasi dan orientasi yg dikehendaki, lokasi tersebut akan dimasukkan ke dalam pengawal (controller) ŌĆó Semasa playback, pengawal akan gerakkan joints ke lokasi dan orientasi yg sama ŌĆó Biasanya point-to-point, pergerakan antara titik tidak dispesifikasikan/dikawal ŌĆó Titik yg diarahkan sahaja akan dijamin dicapai Continous-path Playback ŌĆó Semua joints akan bergerak secara serentak ŌĆó Pergerakan akan direkod secara berterusan oleh pengawal ŌĆó Semasa playback, pergerakan yang sama akan dilakukan
- 12. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 012 Drp: 13 ŌĆó Pergerakan dilakukan : -Oleh operator -Menggerakkan end-effector secara fizikal -Menggerakkan robot arm -Menggerakkannya melalui workspace Offline ŌĆó Dibuat tanpa menggunakan robot utk menentukan kedudukannya ŌĆó Aturcara ditulis menggunakan text editor pada sebarang PC mengikut bahasa tertentu ŌĆó Aturcara disalin kepada storan komputer dan pergerakan robot mengikut aturcara ŌĆó Memerlukan pengetahuan -Model Kinematik -Geometri Robot ŌĆó Membolehkan ujian dilakukan terhadap aturcara yang dibangunkan Software ŌĆó Satu program ditulis sama ada online atau offline ŌĆó Program akan dilakukan oleh pengawal yang mengawal pergerakan ŌĆó Sangat sofistikated dan versatile ŌĆó Boleh mempunyai -Maklimat sensory -Conditional statements -Branching ŌĆó Memerlukan pengetahuan tentang OS dan bahasa pengaturcaraan
- 13. NO KOD / CODE NO H-176-2/M08/KP(1/3) Muka: 013 Drp: 13 SOALAN : 1. Senaraikan undang-undang robot. 2. Berikan kelebihan dan kelemahan setiap robot. RUJUKAN : 1. Gordon McComb and Mike Predko, The Robot BuilderŌĆÖs Bonanza, Fourth Edition. ISBN 15, 874-2-5304-1925-1