


![距離画像を3次元情報に変換
void draw(){
kinect.update();
PImage rgbImage = kinect.rgbImage();
//縦横(pixel)とDepthの組をx,y,z座標(mm)に変換
//PVectorの一次元配列に全データを記録
PVector[] realWorld = kinect.depthMapRealWorld();
/*以下省略*/
pixelと濃淡
変換
実空間](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-36-320.jpg)
![距離画像とrealWorldとの対応付け
P00
(x,y,z)
P01
(x,y,z)
P02
(x,y,z)
P10
(x,y,z)
P11
(x,y,z)
P12
(x,y,z)
P20
(x,y,z)
P21
(x,y,z)
P23
(x,y,z)
【ポイント】
? 3次元座標は一次
元配列realWorld
に格納されている
? 任意のu,vピクセル
のx,y,zを知るには
計算が必要
P00 P01 P02 P10 P11 P12 P20 P21 P22 ???
0 1 2
v
0
1
2
u
realWorld
[0] [1] [2] [3] [4] [5] [6] [7] [8] ???
v = 0 段目 v = 1 段目 v = 2 段目
ピクセルu,vでの3次元座標 → realWorld[v*画像の横幅 + u]
【距離画像】](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-37-320.jpg)
![3Dデータを描画しよう (2/2)
beginShape(POINTS);
endShape();
//v:縦, u:横、それぞれ4pixelおきに3次元座標を取得
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index];
stroke(255,255,0); //描画色(黄色)
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
X
Y
Z
黒画素(z=0)は
描画したくない](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-39-320.jpg)
![3Dデータを原点付近に移動させよう
translate(0,0,-600); //600mm後ろに戻す (場合による)
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index];
stroke(255,255,0); //描画色
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
endShape();
X
Y
Z](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-42-320.jpg)
![3Dデータを手乗りサイズにしよう
scale(0.3); //サイズを3/10にする
translate(0,0,-600);
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index]; //
stroke(255,255,0); //描画色
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-44-320.jpg)
![背景のデータを除去:描画範囲の限定
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index]; //
stroke(255,255,0);
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
endShape();
if(point.z>0 && point.z<1500) {
vertex(point.x, point.y, point.z);
}
除去
1500mm未満なら描画](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-47-320.jpg)
![点描にカメラ画像の色を割り当てよう
beginShape(POINTS);
for(int v=0; v<kinect.depthHeight(); v+=4){
for(int u=0; u<kinect.depthWidth(); u+=4){
int index = u + v * kinect.depthWidth();
PVector point = realWorld[index]; //
color pixelColor = rgbImage.pixels[index];
stroke(255,255,0);
if(point.z>0) {
vertex(point.x, point.y, point.z);
}
}
}
endShape();
stroke(pixelColor); //各ピクセルの色を指定](https://image.slidesharecdn.com/slidesharesoil-181205215624/85/19-SOIL-RGB-D-AR-49-320.jpg)

第19回厂翱滨尝水曜セミナー:搁骋叠-顿カメラで础搁空间に入り込もう
- 2. 自己紹介 氏名:吉永崇(Takashi Yoshinaga) 所属:九州先端科学技術研究所(ISIT) 専門:AR/VRを用いた情報可視化と各種計測 コミュニティ:ARコンテンツ作成勉強会 主催
- 3. ARコンテンツ作成勉強会の紹介 ? 2013年5月に勉強会をスタート ? ARコンテンツの作り方をハンズオン形式で学ぶ ? 人数は5~10名程度の少人数で実施 ? 参加条件はAR/VRに興味がある人(知識不要) ? 各地で開催 (福岡、熊本、宮崎、長崎、大分、 鹿児島、山口、広島、関東)
- 5. SRP Open Innovation Lab主催 SOIL水曜セミナー 今回のイベントについて 登録よろしく! https://soil.connpass.com/
- 6. セットアップ ? Kinect for Windows SDK v1.8 https://www.microsoft.com/en-us/download/details.aspx?id=40278 ? Processing 2.2.1 https://processing.org/download/ Processingを起動後、下記を解凍したフォルダを Processingのlibrariesフォルダに配置 (Windowsの場合:C:?Users?YOU?Documents?Processing? libraries) ? SimpleOpenNI 1.96 https://code.google.com/archive/p/simple-openni/downloads ? NyARToolKit (nyar4psg.zip) https://github.com/nyatla/NyARToolkit-for-Processing/releases 下記を解凍してデスクトップ等のわかりやすいところに配置 https://drive.google.com/file/d/1ahzAzp_s5gqg5WbfJkF5JSv5v87qm KZv/view?usp=sharing
- 9. Kinectを用いたコンテンツ開発 ↑ カラー画像+距離画像+3D計測 人体認識 → とC# or C++を使えば開発可能 結構敷居が高い を使うと比較的簡単に開発可能
- 11. ARToolKit、NyARToolKit ? ARが一般に認知されるきっかけとなったライブラリ ? カメラと正方形のマーカーを使用してCGを重畳 ? もともとはC/C++向けに開発 ? processing対応の派生版ライブラリNyARToolKit 画像の取得 ? 二値化等の画像処理 ? マーカの検出 位置?姿勢計算 CGを重畳 (引用元: http://www.youtube.com/watch?v=TqGAqAFlGg0) (D.Wagner et al. Computer Vision Winter Workshop, 2007)
- 13. processingを起動 実行 テキストエディタ ここにソースコードを記述 保存 【起動】 ? processing のアイコンを クリック 【保存】 ? 保存ボタンを クリック ? Sample1と して保存
- 14. processingでウィンドウを表示させよう //setup関数内で初期設定 void setup(){ size(256,256); //ウィンドウ内部のサイズ background(200,200,200); //ウィンドウ内部の色 } デフォルトでは色をRGBで表現(それぞれ0~255)
- 17. 頂点を指定して図形を描画 【三角形】 strokeWeight(2); //枠線の幅 beginShape(TRIANGLES); vertex(70, 10); vertex(70, 60); vertex(150, 60); endShape(); (70,10) (70,60) (150,60) 【点(塗りつぶし円)】 strokeWeight(60); //点の幅(=円の直径) beginShape(POINTS); vertex(35,100); //点の中心位置(x,y) endShape(); 60 60 (35,100) 詳細 https://processing.org/reference/beginShape_.html
- 18. 次のプロジェクトの作成 保存新規作成 【新規作成】 ? 新規ボタンをクリック ? Sample1の内容を コピー&ペースト ? draw関数内を消す 【保存】 ? 保存ボタンをクリック ? Sample2として保存
- 19. void draw(){ stroke(255,0,0); //赤で塗りつぶし strokeWeight(30); //直径をセット beginShape(POINTS); for(int x=0; x<5; x+=1){ vertex(40*x, 0); //円 } endShape(); } for文を用いた繰り返し処理 (1/2) x=0 x=1 x=2 x=3 x=4 40 (=40*1) 80 (=40*2)
- 20. for文を用いた繰り返し処理 (2/2) void draw(){ stroke(255,0,0); //赤で塗りつぶし strokeWeight(30); //直径をセット beginShape(POINTS); for(int y=0; y<5; y+=1){ for(int x=0; x<5; x+=1){ vertex(40*x, 0); //円 } } endShape(); } vertex(40*x, 40*y); y → 0 y → 1 y → 2 y → 3 y → 4
- 21. 描画位置をずらそう void draw(){ translate(20,20); //全体をx,y方向に20ずつ移動 stroke(255,0,0); strokeWeight(30); beginShape(POINTS); for(int y=0; y<5; y+=1){ for(int x=0; x<5; x+=1){ vertex(40*x, 40*y); } } endShape(); }
- 22. void draw(){ translate(20,20); //全体をx,y方向に20ずつ移動 stroke(255,0,0); strokeWeight(30); beginShape(POINTS); for(int y=0; y<5; y+=1){ for(int x=0; x<5; x+=1){ vertex(40*x, 40*y); } } endShape(); } 1個おきに描画しよう for(int y=0; y<5; y+=1){ for(int x=0; x<5; x+=2){ vertex(40*x, 40*y); } } for(int y=0; y<5; y+=2){ for(int x=0; x<5; x+=2){ vertex(40*x, 40*y); } }
- 23. 次のプロジェクトの作成 保存新規作成 【新規作成】 ? 新規ボタンをクリック ? Sample2の内容を コピー&ペースト ? setup関数とdraw関数 の内側のコードを消す 【保存】 ? 保存ボタンをクリック ? Sample3として保存
- 24. Kinectを起動させよう import SimpleOpenNI.*; //SimpleOpenNIを読み込む SimpleOpenNI kinect; //Kinectを扱うための変数 void setup(){ //OpenNIおよびKinectを初期化 kinect = new SimpleOpenNI(this); if(kinect.isInit() == false){ exit(); return; } }
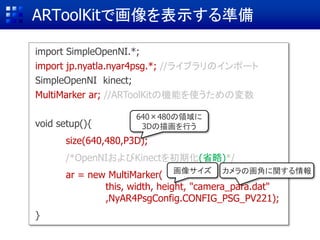
- 27. ARToolKitで画像を表示する準備 import SimpleOpenNI.*; import jp.nyatla.nyar4psg.*; //ライブラリのインポート SimpleOpenNI kinect; MultiMarker ar; //ARToolKitの機能を使うための変数 void setup(){ size(640,480,P3D); /*OpenNIおよびKinectを初期化(省略)*/ ar = new MultiMarker( this, width, height, "camera_para.dat" ,NyAR4PsgConfig.CONFIG_PSG_PV221); } 640×480の領域に 3Dの描画を行う カメラの画角に関する情報画像サイズ
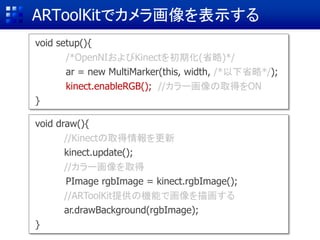
- 28. ARToolKitでカメラ画像を表示する void draw(){ //Kinectの取得情報を更新 kinect.update(); //カラー画像を取得 PImage rgbImage = kinect.rgbImage(); //ARToolKit提供の機能で画像を描画する ar.drawBackground(rgbImage); } void setup(){ /*OpenNIおよびKinectを初期化(省略)*/ ar = new MultiMarker(this, width, /*以下省略*/); kinect.enableRGB(); //カラー画像の取得をON }
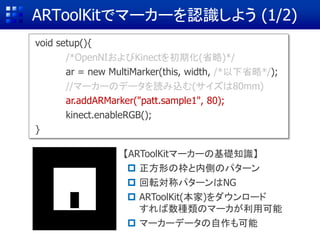
- 29. ARToolKitでマーカーを認識しよう (1/2) void setup(){ /*OpenNIおよびKinectを初期化(省略)*/ ar = new MultiMarker(this, width, /*以下省略*/); //マーカーのデータを読み込む(サイズは80mm) ar.addARMarker("patt.sample1", 80); kinect.enableRGB(); } 【ARToolKitマーカーの基礎知識】 ? 正方形の枠と内側のパターン ? 回転対称パターンはNG ? ARToolKit(本家)をダウンロード すれば数種類のマーカが利用可能 ? マーカーデータの自作も可能
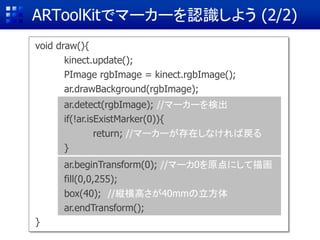
- 30. ARToolKitでマーカーを認識しよう (2/2) void draw(){ kinect.update(); PImage rgbImage = kinect.rgbImage(); ar.drawBackground(rgbImage); } ar.detect(rgbImage); //マーカーを検出 if(!ar.isExistMarker(0)){ return; //マーカーが存在しなければ戻る } ar.beginTransform(0); //マーカ0を原点にして描画 fill(0,0,255); box(40); //縦横高さが40mmの立方体 ar.endTransform();
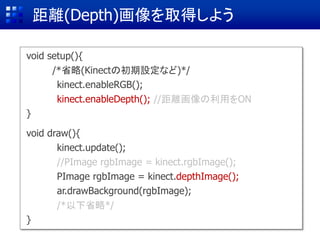
- 33. 距離(Depth)画像を取得しよう void setup(){ /*省略(Kinectの初期設定など)*/ kinect.enableRGB(); kinect.enableDepth(); //距離画像の利用をON } void draw(){ kinect.update(); //PImage rgbImage = kinect.rgbImage(); PImage rgbImage = kinect.depthImage(); ar.drawBackground(rgbImage); /*以下省略*/ }
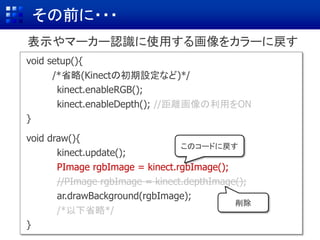
- 35. その前に??? void setup(){ /*省略(Kinectの初期設定など)*/ kinect.enableRGB(); kinect.enableDepth(); //距離画像の利用をON } void draw(){ kinect.update(); PImage rgbImage = kinect.rgbImage(); //PImage rgbImage = kinect.depthImage(); ar.drawBackground(rgbImage); /*以下省略*/ } 表示やマーカー認識に使用する画像をカラーに戻す このコードに戻す 削除
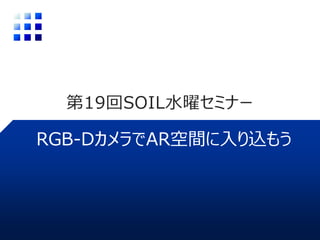
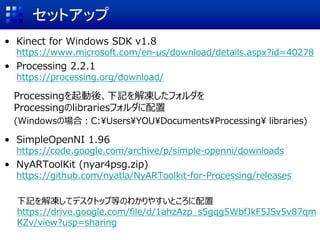
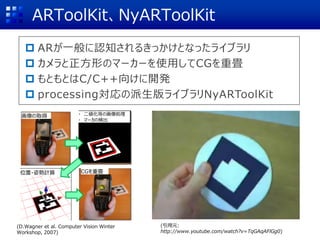
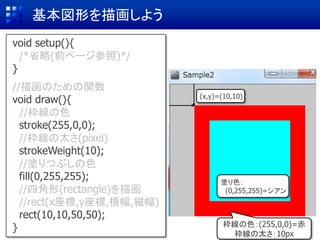
- 36. 距離画像を3次元情報に変換 void draw(){ kinect.update(); PImage rgbImage = kinect.rgbImage(); //縦横(pixel)とDepthの組をx,y,z座標(mm)に変換 //PVectorの一次元配列に全データを記録 PVector[] realWorld = kinect.depthMapRealWorld(); /*以下省略*/ pixelと濃淡 変換 実空間
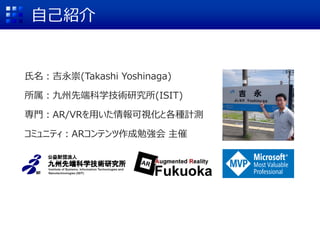
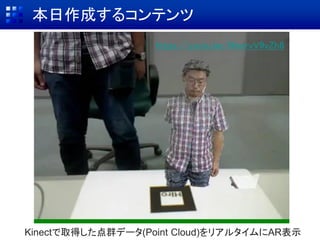
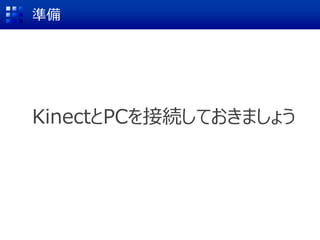
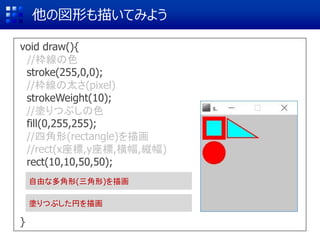
- 37. 距離画像とrealWorldとの対応付け P00 (x,y,z) P01 (x,y,z) P02 (x,y,z) P10 (x,y,z) P11 (x,y,z) P12 (x,y,z) P20 (x,y,z) P21 (x,y,z) P23 (x,y,z) 【ポイント】 ? 3次元座標は一次 元配列realWorld に格納されている ? 任意のu,vピクセル のx,y,zを知るには 計算が必要 P00 P01 P02 P10 P11 P12 P20 P21 P22 ??? 0 1 2 v 0 1 2 u realWorld [0] [1] [2] [3] [4] [5] [6] [7] [8] ??? v = 0 段目 v = 1 段目 v = 2 段目 ピクセルu,vでの3次元座標 → realWorld[v*画像の横幅 + u] 【距離画像】
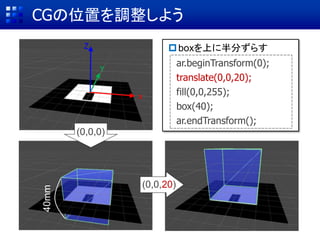
- 38. 3Dデータを点で描画しよう (1/2) void draw(){ /*Kinectの画像取得や変数の宣言(省略)*/ /*マーカーの認識 (省略)*/ ar.beginTransform(0); // translate(0,0,20); fill(0,0,255); box(40); ar.endTransform(); } beginShape(POINTS); //ここで描画する点の3次元座標を指定 (次頁) endShape(); translate(0,0,20); fill(0,0,255); box(40);
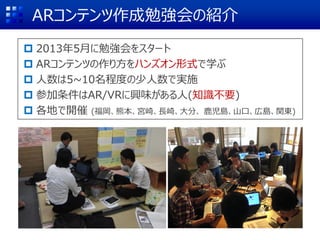
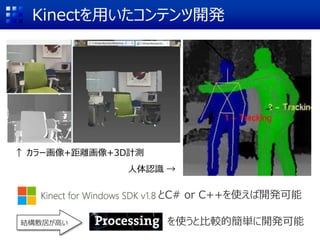
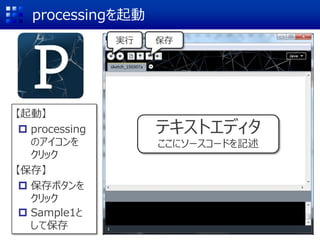
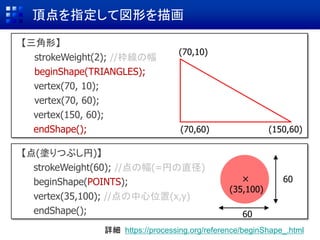
- 39. 3Dデータを描画しよう (2/2) beginShape(POINTS); endShape(); //v:縦, u:横、それぞれ4pixelおきに3次元座標を取得 for(int v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; stroke(255,255,0); //描画色(黄色) if(point.z>0) { vertex(point.x, point.y, point.z); } } } X Y Z 黒画素(z=0)は 描画したくない
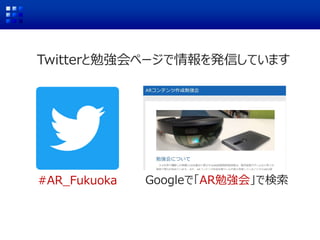
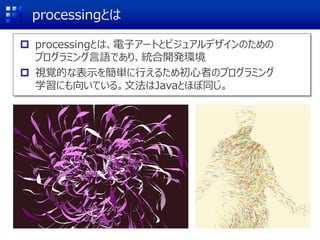
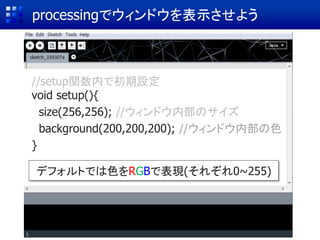
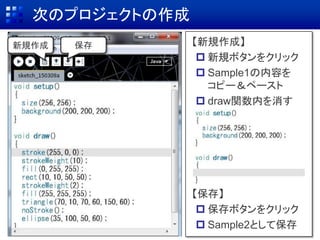
- 42. 3Dデータを原点付近に移動させよう translate(0,0,-600); //600mm後ろに戻す (場合による) beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; stroke(255,255,0); //描画色 if(point.z>0) { vertex(point.x, point.y, point.z); } } } endShape(); X Y Z
- 44. 3Dデータを手乗りサイズにしよう scale(0.3); //サイズを3/10にする translate(0,0,-600); beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; // stroke(255,255,0); //描画色 if(point.z>0) { vertex(point.x, point.y, point.z); } } }
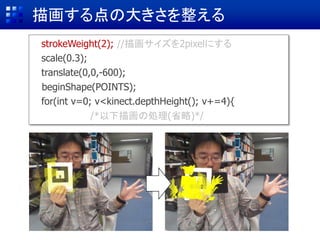
- 45. 描画する点の大きさを整える strokeWeight(2); //描画サイズを2pixelにする scale(0.3); translate(0,0,-600); beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ /*以下描画の処理(省略)*/
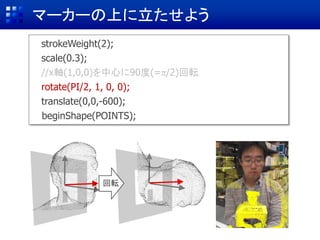
- 46. マーカーの上に立たせよう strokeWeight(2); scale(0.3); //x軸(1,0,0)を中心に90度(=π/2)回転 rotate(PI/2, 1, 0, 0); translate(0,0,-600); beginShape(POINTS); 回転
- 47. 背景のデータを除去:描画範囲の限定 beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; // stroke(255,255,0); if(point.z>0) { vertex(point.x, point.y, point.z); } } } endShape(); if(point.z>0 && point.z<1500) { vertex(point.x, point.y, point.z); } 除去 1500mm未満なら描画
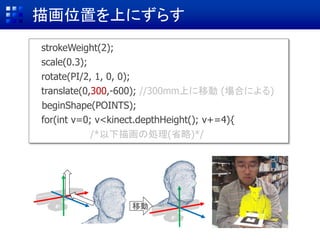
- 48. 描画位置を上にずらす 移動 strokeWeight(2); scale(0.3); rotate(PI/2, 1, 0, 0); translate(0,0,-600); //600mm後ろに戻す (場合による) beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ /*以下描画の処理(省略)*/ translate(0,300,-600); //300mm上に移動 (場合による)
- 49. 点描にカメラ画像の色を割り当てよう beginShape(POINTS); for(int v=0; v<kinect.depthHeight(); v+=4){ for(int u=0; u<kinect.depthWidth(); u+=4){ int index = u + v * kinect.depthWidth(); PVector point = realWorld[index]; // color pixelColor = rgbImage.pixels[index]; stroke(255,255,0); if(point.z>0) { vertex(point.x, point.y, point.z); } } } endShape(); stroke(pixelColor); //各ピクセルの色を指定
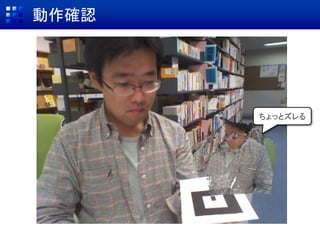
- 50. 動作確認 ちょっとズレる
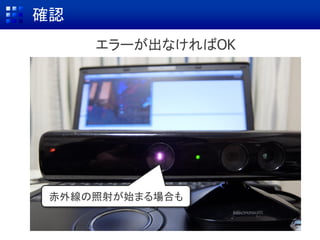
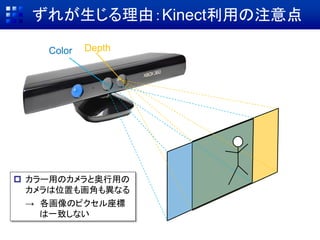
- 51. ずれが生じる理由:Kinect利用の注意点 Color Depth ? カラー用のカメラと奥行用の カメラは位置も画角も異なる → 各画像のピクセル座標 は一致しない
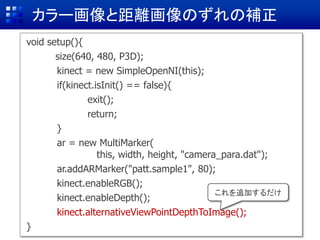
- 52. カラー画像と距離画像のずれの補正 void setup(){ size(640, 480, P3D); kinect = new SimpleOpenNI(this); if(kinect.isInit() == false){ exit(); return; } ar = new MultiMarker( this, width, height, "camera_para.dat"); ar.addARMarker("patt.sample1", 80); kinect.enableRGB(); kinect.enableDepth(); kinect.alternativeViewPointDepthToImage(); } これを追加するだけ
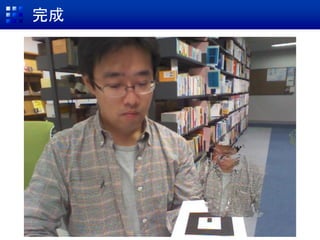
- 53. 完成
- 54. 【参考】 ? processingリファレンス https://processing.org/reference/ ? SimpleOpneNI公式サイト https://code.google.com/p/simple-openni/ ? NyARToolKit公式サイト http://nyatla.jp/nyartoolkit/wp/ ? ARToolKit公式サイト(最新) http://artoolkit.org/