2021 ????????? ??? ????
Download as pptx, pdf0 likes33 views

2021.01.02 ~ 03?, 1?2? ?? ?? ????????? ??? ???? ???? ???.
1 of 10
Download to read offline




Ad
Recommended
Capstone2 final - Smart Shopping Bot
Capstone2 final - Smart Shopping BotChan-Young Han
?
Autonomous 4 Axis Planar Manipulator Robot for Grapping stuff at offline market.
This is made of gradient based path-planning and Odometry using matlab bluetooth communication and arduino spi internal communicationSK Communications Open ?? ? ?? ??
SK Communications Open ?? ? ?? ??Cyworld AppStore (SK Communications)
?
2009? 7? 7? SK??????? ??????? - ??? ??? by ??? CEO?? ?? ???? ??? ?? ??? ??? ??
?? ?? ???? ??? ?? ??? ??? ??trustinlee
?
'Career Management via Open Source Project Participation' - presented at Open Source Symposium, hosted by Red Hat Korea and Daou Tech (16 October 2007)ZZIGNAL project
ZZIGNAL projectHyeinGu
?
This is the project for Intelligent Personal Assistant for hard of hearing.
You can see our project below.
https://github.com/hyein99/Project_ZZIGNALSpaces and Traces: Implications of Smart Technology in Public Housing
Spaces and Traces: Implications of Smart Technology in Public HousingYoonyoungLee5
?
??? ??? ???? ?? ???? '??? ?'??? ??? ??? ????? ????? ? ? ???? ?? ?????. ????? ????? ??? ?? ???? ??? ??? ??? ??????, ??? ? ??? ???? '?? ??'?? '??? ??? ???'? ?? ??? ?? ???? ???? ?? ??? ????? ???????.More Related Content
What's hot (20)
?? ?? ???? ??? ?? ??? ??? ??
?? ?? ???? ??? ?? ??? ??? ??trustinlee
?
'Career Management via Open Source Project Participation' - presented at Open Source Symposium, hosted by Red Hat Korea and Daou Tech (16 October 2007)ZZIGNAL project
ZZIGNAL projectHyeinGu
?
This is the project for Intelligent Personal Assistant for hard of hearing.
You can see our project below.
https://github.com/hyein99/Project_ZZIGNALSpaces and Traces: Implications of Smart Technology in Public Housing
Spaces and Traces: Implications of Smart Technology in Public HousingYoonyoungLee5
?
??? ??? ???? ?? ???? '??? ?'??? ??? ??? ????? ????? ? ? ???? ?? ?????. ????? ????? ??? ?? ???? ??? ??? ??? ??????, ??? ? ??? ???? '?? ??'?? '??? ??? ???'? ?? ??? ?? ???? ???? ?? ??? ????? ???????.Editor's Notes
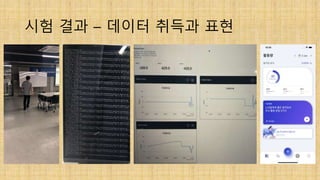
- #8: ?? ???? ???? 4?? ???? ??? ? ? ????. STM32 ???? ?/?? ? ??? ?? ?? ??? ??? ????? ???? ?? ?? AI ? ????? ? ????? AWS ? thingspark ?? ???? ??? ??? ??? ?? ????? ??? ?? API ??? ??? ???????
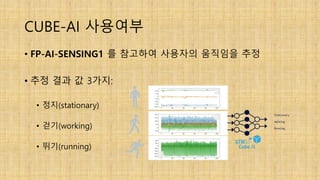
- #9: ?? ?? ?? ?? ? STM32 ?? ?? AI ? FP-AI-SENSING1 ???? ????, ?? / ?? / ?? ? 3?? ???? ??????? ??? STM32 ?? ???? Human Activity Recognition ? ??????
- #10: ?? ????? ?? ???? ?? ?? AI ? ?? ? ??? ????? ?? ?? ?? ??? ? ???, AWS ?? ?? thingspark ?? ????? ? ??? ????, ??? ? ?? ???? ?? ? ???? ??? ?? ???? UI ? ?????? ?? ? ? ??? ?? ???.