ø’¥Èª≠œÒºº ı§»3¥Œ‘™•Í•¢•Î•ø•§•ý•«©`•ø§Œø… ”ªØ§À§ƒ§§§∆
?Download as PPTX, PDF?
8 likes?6,287 views

…˙è—ߪ·◊‘”…ºØª·§Œ∞k±Ì◊ ¡œ§«§π°£




















































ø’¥Èª≠œÒºº ı§»3¥Œ‘™•Í•¢•Î•ø•§•ý•«©`•ø§Œø… ”ªØ§À§ƒ§§§∆
- 5. •…•Ì©`•Û§« ûƒ∫¶æ»÷˙µ»§À π§®§Î •∑•π•∆•ý◊˜§Ï§ §§§´£ø DFID - ”¢π˙π˙ÎHÈ_∞k ° CC BY 3.0 •Õ•—©`•Îµÿ’§«§Œ•…•Ì©`•Û§Ú π§√§øûƒ∫¶æ»÷˙ https://www.flickr.com/photos/dfid/16691214064
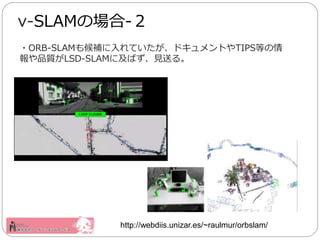
- 11. £±£Æv-SLAM £®visual SLAM£© £∫ •Í•¢•Î•ø•§•ý§«Ög—€•´•·•È§ŒÑ”ª≠ •«©`•ø§´§È◊‘º∫Œª÷√Õ∆∂®§»≠hæ≥µÿá̧Ú◊˜≥…§π§Îºº–g°£ΩÒªÿ π§√§ø§Œ§œ LSD-SLAM°£À˚§À§œORB-SLAM§‰SVO°¢PTAMµ»§¨§¢§Î°£§≥§Ïœµ§Œºº –g§œ¥ÛçœPTAM§Ú”H§»§∑§∆≈……˙§∑§øºº–g°£ §Þ§ø°¢ LiDARµ»§Œ∏þÅ˝§ •ª•Û•µ§Ú π”√§ª§∫§»§‚∞≤Å˝§ •´•·•È§«µ„»∫ •«©`•ø§Úµ√§È§Ï§Î°£◊ÓΩ¸§œæ´∂»§‚¡º§§°£ »°µ√§∑§ø•«©`•ø§œ§…§¶º”π§§π§Î§Œ£ø-1 https://www.youtube.com/watch?v=Gnu QzP3gty4 LSD-SLAM ORB-SLAM SVO PTAM https://www.youtube.com/watch?t=142& v=Y9HMn6bd-v8 https://www.youtube.com/watch?v=2YnIMfw6 bJY https://www.youtube.com/watch?v= 8DISRmsO2YQ
- 12. £≤£ÆSfM£®Structure from Motion£©£∫•™•Î•Ωª≠œÒ§‰•ø•§•Îª≠œÒ°¢DEM §¨±ÿ“™§ àˆ∫œ§œ§≥§¡§È°£…Ô√§«◊Ó§‚”–√˚§ §Œ§œAgisoft§ŒPhotoScan°£ ◊ÓΩ¸§¿§»•…•Ì©`•Û”√WEB•µ©`•”•π§ŒPix4D§¨ƒø¡¢§√§∆§≠§∆§§§Î°£ ∑«…Ô√§«§¢§Ï§–VisualSfMµ»§¨§¢§Î°£•™©`•◊•Û•Ω©`•π§«§¢§Ï§– OpenMVG°¢OpenSfM§ §…§¨”–√˚°£ v-SLAM§»Õ¨§∏§Ø∞≤Å˝§ •´•·•È§Œ§þ§«µ„»∫§‰§Ω§ŒÀ˚«ÈàÛ§Ú◊˜≥…§«§≠§Î°£ »°µ√§∑§ø•«©`•ø§œ§…§¶º”π§§π§Î§Œ£ø-2 https://www.flickr.com/photos/crschmidt/152608885 06/ PhotoScan Pro Pix4D https://pix4d.com/ VisualSfM http://ccwu.me/vsfm/ OpenMVG OpenSfM https://github. com/mapillary /OpenSfM https://github.com/openMVG/openMVG/
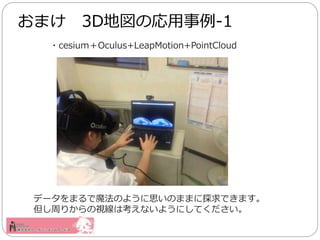
- 18. £¥£Æ•ð•§•Û•»•Ø•È•¶•…£∫SfM§‰v-SLAM°¢ LiDAR§«»°µ√§∑§øµ„»∫ •«©`•ø°£ŒÔÃÂ’J◊R§‰’œ∫¶ŒÔªÿ±Ðµ»§Œ◊‘Ñ”þ\Ðûœµ§« π§√§ø§Í§π§Î°£ΩÒ ªÿ§œ3¥Œ‘™µÿá̧À π”√§∑§Þ§π°£ º”π§§∑§ø≥…π˚ŒÔ§œ§…§¶¿˚”√§π§Î§Œ£ø-£¥ http://subspace.nicta.com.au/#publicDemos https://www.youtube.com/watch?v=r9LegSK6MfU ¿˝£±£∫Cesium§«§Œ•ð•§•Û•»•Ø•È•¶•…±Ì æ¿˝ ¿˝£≤£∫•ð•§•Û•»•Ø•È•¶•…§Ú”√§§§ø◊‘∂Ø‘ÀÐû¿˝
- 23. ? Cesium§œ°¢•◊•È•∞•§•Û§ §∑§«Web•÷•È•¶•∂…œ§«3Dµÿá̧‰2DµÿáÌ§Ú±Ì æ§π §Î§ø§·§ŒJavaScript•È•§•÷•È•Í°£WebGL§Àåùèͧ∑§ø•÷•È•¶•∂…œ§«Ñ”◊˜§π§Î°£ §∂§√§Ø§Í—‘§®§–Google Earth§Œ•™©`•◊•Û•Ω©`•π∞ʧŒ§Ë§¶§ §‚§Œ°£ Cesium§»§œ£ø https://cesiumjs.org/index.html https://cesiumjs.org/Cesium/Apps/Sandcastle/index. html
- 24. £±£ÆGoogle Earth§ŒWEB∞ʧ‚◊Ó≥ıøº§®§ø§¨°¢§Ω§‚§Ω§‚¨Fïrµ„§«◊Ó–¬§Œ Chrome§«Ñ”◊˜§∑§ §§§Œ§«∫Ú—a§´§ÈÕ‚§Ï§ø°£ £≤£Æ Google Earthµ»§Œ…Ô√•¢•◊•Í§œª˘µ◊≤ø∑÷§Ú§§§∏§Ï§ §§§Œ§«°¢”˚§∑§§ôCƒÐ §Ú◊‘«∞§«åg◊∞§«§≠§ §§§ø§·°¢•™©`•◊•Û•Ω©`•π§«§¢§Î§Œ§œ±ÿÌö“™º˛§¿§√§ø°£ Cesium§œª˘µ◊≤ø∑÷§œ§‚§»§Ë§Í°¢UI§‚¥Û∑˘§Àâ‰∏¸ø…ƒÐ§ §Œ§‚§´§ §Í•ð•§•Û•»∏þ §§°£ £≥£ÆWebGL§Àåùèͧ∑§ø•÷•È•¶•∂§«§¢§Ï§–∂Àƒ©§Úþx§–§ §§°£ £¥£Æ•…•Ì©`•Û§´§È§Œ•«©`•ø§ÚíQ§¶…œ§«°¢•µ©`•–§´§È•Í•¢•Î•ø•§•ý§«¥Û¡ø§Œ•«©` •ø§ÚíQ§¶§À§œ•÷•È•¶•∂…œ§«WebSocket§‰WebRTCµ»§ŒHTML5ºº–g§»”H∫Õ–‘§¨ ∏þ§§§‚§Œ§¨¡º§´§√§ø°£ £µ£ÆKML§‰GeoJSONµ»ÒZ»æ§þ…Ó§§•«©`•ø•Ω©`•π§Ú§Ω§Œ§Þ§Þ π§®§Î§ø§·°¢þ^»• §ŒŸYÆb§ÚªÓ§´§∑§‰§π§§°£ § §ºCesium£ø£≠£±
- 36. SfM§Œàˆ∫œ-8 OpenDroneMap§Œ¿˝£≠£≤ Fig.£¥ ø’÷–•Ÿ•Û•¡ Fig.£µ π¬∂¿§ ªÛ–«
- 37. SfM§Œàˆ∫œ-9 OpenSfM§Œ¿˝ Fig.1 √˚◊¥§∑§¨§ø§§π´à@ Fig.2 √˚◊¥§∑§¨§ø§§≤©ŒÔπð
- 39. ¢Ÿ EXIF∏∂§≠ª≠œÒ§Ú•’•©•Î•¿§À»Î§Ï§∆°¢§Ω§Œ•’•©•Î•¿ƒ⁄§« OpenDroneMap/run.pl §Úåg––§π§Î§≥§»§«OpenDroneMap§Œ•Ô©`•Ø•’•Ì©`§¨åg––§µ§Ï§Î°£ ¢⁄ åg––··§À§œµ„»∫•«©`•ø§»•™•Î•Ωª≠œÒ°¢ 3D•·•√•∑•Â•™•÷•∏•ß•Ø •»§¨…˙≥…§µ§Ï§Î°£ ¢€ •∆•≠•¡•„∏∂§≠3D•·•√•∑•Â•™•÷•∏•ß•Ø•»£®obj£©§œ§Ω§Œ§Þ§Þ§Œ–Œ Ω§¿§»cesium§À±Ì 槫§≠§ §§§ø§·°¢“ªµ©Meshlabµ»§«COLLADA–Œ Ω§Àâ‰ìQ§∑°¢∏¸§À§Ω§≥§´§Ècesium•È•§•÷•È•ÍΩU”…§«glTF–Œ Ω§À≠ìQ§π§Î§≥§»§«§Ë§¶§‰§Øcesium…œ§À3D•‚•«•Î§»§∑§∆±Ì 槨ø…ƒÐ§»§ §Î°£ ≤Œøº£∫SfM§«◊˜§√§ø§‚§Œ§ÚCesium§« ±Ì æ§π§Î§À§œ£ø-OpenDroneMapæé
- 40. ¢Ÿ EXIF∏∂§≠ª≠œÒ§Ú°∏images°π•’•©•Î•¿§À§§§Ï§∆°¢•—•È•·©`•øµ»§¨”õðd§µ§Ï§ø°∏config.yaml°π§Ú”√“‚§π§Î°£ OpenSfM/bin/run_all •’•©•Î•¿√˚ °æ•’•©•Î•¿òã‘Ï¿˝°ø testData/ ©∏config.yaml ©∏images/ ©∏img_00.jpg ©∏img_01.jpg ©∏img_02.jpg ©∏img_03.jpg ©∏img_04.jpg ©∏img_05.jpg °æåg––¿˝°ø OpenSfM/bin/run_all testData ¢⁄ åg––··§À§œJSON–Œ Ω§Œµ„»∫•«©`•ø§¨§«§≠§Î°£•«•’•©•Î•»§Œ§Þ§Þ§¿§»ECEF◊˘òÀœµ(µÿ«Ú÷––ƒ?µÿ«ÚπÃ∂®÷±Ωª ◊˘òÀœµ)§«≥ˆ¡¶§µ§Ï§Î§ø§·ECEF◊˘òÀœµ?æï∂»ΩU∂»§Œâ‰ìQ§Ú––§¶±ÿ“™§¨§¢§√§ø°£ ¢€ Ply–Œ Ω§ÀPython§«â‰ìQ··°¢Cesium§«±Ì 槨ø…ƒÐ§»§ §Î°£§ø§¿§∑Ω®ŒÔ§Œ∫·§´§È¥È§√§ø–¥’ʧ«§¢§Ï§–•∏•™•Í •’•°•Ï•Û•π§Œæ´∂»§œ§Ω§≥§Þ§«ÜñÓ}§«§œ§ §§§¨°¢∫Ωø’–¥’ʧŒ§Ë§¶§ …œ§´§È¥È§√§ø–¥’ʧŒàˆ∫œ§œº§§∑§Ø§∫§Ï§Î°£∏þ§µ §¨•œ©`•…•≥©`•«•£•Û•∞§µ§Ï§∆§§§ø§Í§∑§ø§Œ§«°¢ø÷§È§Ø∫·§´§È§Œª≠œÒ§ÀÃÿªØ§∑§∆§§§Î£ø ≤Œøº£∫SfM§«◊˜§√§ø§‚§Œ§ÚCesium§« ±Ì æ§π§Î§À§œ£ø-OpenSfMæé
- 41. ¢Ÿ»Œ“‚§Œ•’•©•Î•¿§Àª≠œÒ°¢•π•Ø•Í•◊•»•’•°•§•Î(œ¬”õ≤Œ’’)°¢ª≠œÒÕ¨ ø§ŒΩM§þ∫œ§Ô§ª§Ú”õðd§∑§øXML•’•°•§•Î°¢•◊•Ì•∏•ß•Ø•∑•Á•Û§Ú”õðd§∑§øXML•’•°•§•Î§ §…§Ú»Î§Ï§Î°£ ¢⁄Micmac§À§œòî°©§ •ƒ©`•Î§¨»Î§√§∆§§§Î°£ ∏˜•ƒ©`•Î§Úåg––§π§Î•π•Ø•Í•◊•»§Úﯧذ£ °æ¿˝°øUAS_test.sh ----------------------------------------------- #!/bin/sh BIN_DIR=$1 CHANT_DIR=$2 ${BIN_DIR}mm3d OriConvert OriTxtInFile GPS_WPK_Grand-Leez.csv Nav-Brut-RTL ChSys=DegreeWGS84@SysCoRTL.xml MTD1=1 NameCple=FileImagesNeighbour.xml CalcV=1 ImC=R0040536.JPG NbImC=25 ${BIN_DIR}mm3d Tapioca File FileImagesNeighbour.xml -1 ${BIN_DIR}mm3d Tapas RadialBasic "R0040536.JPG|R0040537.JPG|R0040535.JPG|R0040578.JPG|R0040498.JPG|R0040499.JPG|R0040579.JPG|R0040538.JPG|R0040577.JPG|R0040534.JPG|R0040497.JP G|R0040500.JPG|R0040580.JPG|R0040456.JPG|R0040616.JPG|R0040576.JPG|R0040496.JPG|R0040617.JPG|R0040455.JPG|R0040457.JPG|R0040615.JPG|R0040539.J PG|R0040501.JPG|R0040581.JPG|R0040533.JPG" Out=Sample4Calib-Rel ${BIN_DIR}mm3d AperiCloud "R0040536.JPG|R0040537.JPG|R0040535.JPG|R0040578.JPG|R0040498.JPG|R0040499.JPG|R0040579.JPG|R0040538.JPG|R0040577.JPG|R0040534.JPG|R0040497.JP G|R0040500.JPG|R0040580.JPG|R0040456.JPG|R0040616.JPG|R0040576.JPG|R0040496.JPG|R0040617.JPG|R0040455.JPG|R0040457.JPG|R0040615.JPG|R0040539.J PG|R0040501.JPG|R0040581.JPG|R0040533.JPG" Sample4Calib-Rel Out=Sample4Calib-Rel.ply ${BIN_DIR}mm3d Tapas RadialBasic "R.*.JPG" Out=All-Rel InCal=Sample4Calib-Rel ${BIN_DIR}mm3d CenterBascule "R.*.JPG" All-Rel Nav-Brut-RTL tmp CalcV=1 ${BIN_DIR}mm3d OriConvert OriTxtInFile GPS_WPK_Grand-Leez.csv Nav-adjusted-RTL ChSys=DegreeWGS84@SysCoRTL.xml MTD1=1 Delay=-0.0854304 ${BIN_DIR}mm3d CenterBascule "R.*.JPG" All-Rel Nav-adjusted-RTL All-RTL ${BIN_DIR}mm3d ChgSysCo "R.*JPG" All-RTL SysCoRTL.xml@SysCoBL72_EPSG31370.xml All-BL72 ${BIN_DIR}mm3d AperiCloud "R.*.JPG" All-BL72 Out=All-BL72-cam.ply WithPoints=0 ${BIN_DIR}mm3d Malt Ortho "R.*JPG" All-BL72 DirMEC=MEC DefCor=0 AffineLast=1 Regul=0.005 HrOr=0 LrOr=0 ZoomF=1 ${BIN_DIR}mm3d to8Bits MEC/Z_Num8_DeZoom1_STD-MALT.tif ${BIN_DIR}mm3d Nuage2Ply "MEC/NuageImProf_STD-MALT_Etape_8.xml" Scale=8 Attr="MEC/Z_Num8_DeZoom1_STD-MALT_8Bits.tif" Out=CanopySurfaceModel.ply ----------------------------------------------- ¢€•π•Ø•Í•◊•»§Úåg–– ./UAS_test.sh micmac/bin °˘∏–œÎ£∫PDF§Œ•Þ•À•Â•¢•Î§¨ºs350•⁄©`•∏§‚§¢§Í–ƒ§¨’€§Ï§ø°£ ≤Œøº£∫SfM§«◊˜§√§ø§‚§Œ§ÚCesium§« ±Ì æ§π§Î§À§œ£ø- Micmacæé
- 50. ◊∑”õ •…•Ì©`•Û§ÚÔw§–§π«∞§À’i§Û§«§™§§§ø§€§¶§¨§Ë§§ŸY¡œ http://dil-opac.bosai.go.jp/publication/nied_report/PDF/81/81- 5inoue.pdf ∑¿ûƒø∆—ߺº–g—–æøÀ˘—–æøàÛ∏Ê µ⁄ 81 ∫≈ ◊‘»ªûƒ∫¶’{ñÀ—–æø§Œ§ø§·§Œ •Þ•Î•¡•≥•◊•ø©`ø’¥Èºº–g ÷¯£∫ æÆ…œ π´ ƒ⁄…Ω◊Ø“ª¿… ‚èƒæ±»ƒŒ◊” •…•Ì©`•Û§Ú”√§§§ø‘îºöDEM £®0.5m•·•√•∑•Â£©§‰•™•Î•Ω ª≠œÒ◊˜≥…§»þ\”√§Àåù§π§Îøº≤Ï §Ú§Þ§»§·§ø§‚§Œ°£≤Ÿ◊˜∑Ω∑®§¿ §±§«§œ§ §Ø ¬π §‰±£Íì§ §…§À §‚—‘º∞§∑§∆§™§Í∑«≥£§Àé⁄πݧ« §Ë§Ø§Þ§»§Þ§√§∆§§§Î°£ must read!