3 d printer
?Download as PPTX, PDF?
3 likes?1,029 views

The student group aims to develop a more accurate and efficient 3D printer design using a modified delta robot with parallel manipulation. They plan to research the kinematics of parallel manipulators, design the hardware, manufacture and test a prototype, develop position control algorithms, implement firmware, interface hardware and software, and expand and document the project over a timeline spanning September 2013 to April 2014. The goal is to provide a better and cheaper additive manufacturing technique through an innovative parallel manipulation approach with benefits like greater accuracy, efficiency and lower manufacturing costs.





















3 d printer
- 1. Modified Delta Robot based 3D Printer using Parallel Manipulation Group # 09 Attiya Rehman 2010079 Hira Shaukat 2010131 Talha Hisham 2010362 Ubaid-ur-Rehman 2010366
- 2. OBJECTIVE ˇ° The development of a more accurate and efficient design for 3D printing. We will be researching on parallel manipulation with the incentive of providing a better and cheaper technique for additive manufacturing.ˇ± ? Greater Accuracy ? Greater Efficiency ? Lower Manufacturing Cost ? Innovative Approach
- 3. BASIC PRINCIPLE Fused Deposition Modelling Delta Robot Structure Parallel Manipulators
- 4. LITERATURE REVIEW 3D Printing: ˇ°3D printing is a prototyping process whereby a real object is created from a 3D design.ˇ± Layered Printing: Similar to an Inkjet Printer, a 3D object is made through layer by layer printing Prototyping Technologies: Selective laser sintering (SLS) Fused deposition modelling (FDM) Stereolithography (SLA) Laminated object manufacturing (LOM) Electron beam melting (EBM) SLS FDM
- 5. LITERATURE REVIEW Designing Models: ¨C Computer Numeric Controller ¨C Delta Robot Delta Robot: ? parallel robot ? three arms connected to universal joints at the base ? key design feature ¨C parallelograms in the arms to maintain the orientation of end effecter. Delta CNC
- 6. LITERATURE REVIEW Control Parameters ¨C Desired position of print head is achieved using position control of the linear actuators. ¨C Flow of material through the print head selected according to requirements
- 7. HARDWARE The main structure Stepper Motors Print head Bearings Material Used
- 8. INTERFACING G-Code Coming Firmware Control signals towards the motors
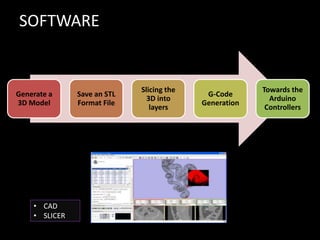
- 9. Generate a 3D Model Save an STL Format File Slicing the 3D into layers G-Code Generation Towards the Arduino Controllers SOFTWARE ? CAD ? SLICER
- 10. EQUIPMENT Frame : ? Top and bottom frame: Hand-cut plywood ? Side and Back frame: Hand-cut plywood ? Fasteners: Stainless steel Electronics : ? Stepper motors: 4 (3 positioning, 1 extruder) ? Endstops : 3 top endstops & 3 bottom endstops ? Electronics: Arduino Microcontrollers. ? Power Supply: Depends on printhead and motors ? Fans: Cooling fans
- 11. EQUIPMENT Linear Motion: ? Fish lines: Optional ? Timing belt: 3 belts (Closed loops or open end) ? Timing belt pulleys: 3 plastic pulleys with teeth. Smaller would probably work better. ? Smooth rod: precise smooth rod - Aluminium ? Linear bearings ? Ball bearings and Additional bearings needed for extruder.
- 12. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 13. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 14. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 15. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 16. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 17. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 18. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 19. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 20. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 21. Research on kinematics of parallel manipulators End of September Designing the hardware 1st week of October Hardware manufacture 3rd week of October Hardware Testing and optimization 3rd and 4th week of October Algorithm development for position control Starting from the end of October Firmware implementation & simulation of algorithm End of November Hardware/ Software interfacing Troubleshooting 1 month Project Expansion 1 month Project documentation 2 weeks SEP 13 OCT 13 NOV 13 DEC 13 JAN 14 FEB 14 MAR 14 APR 14 TIMELINE
- 22. To be continued . . .