






![高密度? 1 次元触覚のセンサシートとの
スペックの比較
大きさ
100×180[mm] 120×120[mm]
センサ素子数 32 個 9 個
重量
1.7[g] 70[g]
次元数
1 3
制作の容易さ ◎ ○
全身分布
◎ ◎
処理速度
25.6[msec]
(1024 個 )
10[msec]
(27 個 )
3 次元センサ1 次元センサ](https://image.slidesharecdn.com/mthesis02-140312225833-phpapp01/85/3D-9-320.jpg)






特许取得した3顿柔软触覚センサの応用例【インタラクティブな製作物】
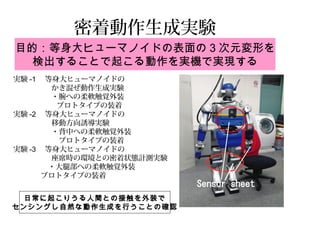
- 1. 密着動作生成実験 目的:等身大ヒューマノイドの表面の 3 次元変形を 検出することで起こる動作を実機で実現する 実験 -1 等身大ヒューマノイドの かき混ぜ動作生成実験 ?腕への柔軟触覚外装 プロトタイプの装着 実験 -2 等身大ヒューマノイドの 移動方向誘導実験 ?背中への柔軟触覚外装 プロトタイプの装着 実験 -3 等身大ヒューマノイドの 座席時の環境との密着状態計測実験 ?大腿部への柔軟触覚外装 プロトタイプの装着 日常に起こりうる人間との接触を外装で センシングし自然な動作生成を行うことの確認
- 6. 実験 -3 等身大ヒューマノイドの座席時 の 環境との密着状態計測実験 静的座り状態 ロボット自体を揺らす 全体 ヒューマノイドの大腿部の 裏側へ配置したセンサシート
- 8. 実験 -3 センサのアナログ値 ② ロボット自体を揺らした静的座り状態起立状態 センサ ID0 の 4 つの 受光素子 のアナロ グ値
- 9. 高密度? 1 次元触覚のセンサシートとの スペックの比較 大きさ 100×180[mm] 120×120[mm] センサ素子数 32 個 9 個 重量 1.7[g] 70[g] 次元数 1 3 制作の容易さ ◎ ○ 全身分布 ◎ ◎ 処理速度 25.6[msec] (1024 個 ) 10[msec] (27 個 ) 3 次元センサ1 次元センサ
- 10. 2 種類のセンサシートを使用したアンケ ート 3 次元センサシート 1 次元センサシート ● 肉厚な手触り?フカフカしている ● 表面のせん断方向の力や押しによる変形 ● 直感的な操作ができた ● 薄型で巻き付けやすい ● なでる動作で移動方向を決定する ● 繊細な接触を検出可能
- 11. 密着動作生成実験まとめ ? 3 次元センサを用い,力の加わる方向の検 出を利用した動作生成の可能性を検証した ? 1 次元センサシートは薄く作れてロバスト であるし,全身を作る場合薄い部分は必要 ? 3 次元センサと組み合わせて,体の部位に 応じて触覚を使い分ける ? 3 次元センサによって,直感的な操作も取 り入れることが可能である
- 12. 等身大ヒューマノイド以外への展 開 Robot Sofa 【制作展第 9 回作品】
- 13. 埋込型柔軟触覚センサを用いた インターフェイス Jelly Interface 【制作展第 10 回作品】 インタフェイス 光ディスプレイ 超軟質ウレタン樹脂 シリコン
- 14. 結論 ? 柔軟外装の立体的な変形を感じる分布触覚センサ実現 ? 実現のポイント:軟質フォーム一体成型+立体配置され た受光?発光素子 ? 受光部は 7mm 立方程度だが,それ以外の成型法,耐久 性,フレキ形状に問題はないだろう?キューブ状以外へ の広がり ? 新たな接触インタラクションの実現 ? 等身大ヒューマノイドロボットで従来なかった, 直感的接触インタラクションを実現 ? “Robot Sofa”? 包み込む接触インタラクションの多様性 と楽しさ発見 ? “Jelly Interface”? 柔軟な生物的デバイスとの接触自体の 楽しさ発見
Editor's Notes
- それぞれの実験がなぜ必要なのか??
- センサデータの动画もプラス
- ロッカーの位置など 一回入力があると3歩進む
- グラフの説明 揺らした方向 イスごと揺らした
- ロボット自体をゆらした
- 柔软がいそうを利用した行动プランニングとつなげることが可能と考えています