3D SLAM introcution& current status
?
2 likes?747 views

This document provides an overview of 3D SLAM (Simultaneous Localization and Mapping) techniques. It discusses what SLAM is, common sensor types used (such as laser, camera), visual odometry methods (feature-based and direct), graph optimization, loop closure, map reconstruction, and several popular open-source SLAM projects (ORB-SLAM, LSD-SLAM, ElasticFusion). It also briefly mentions applications of SLAM such as in robotics, navigation, and augmented/virtual reality.
Convert to study materialsBETA
Transform any presentation into ready-made study materialĪ¬select from outputs like summaries, definitions, and practice questions.
























![ElasticFusion
? ElasticFusion improve two extreme of furmer SLAM systems ©C
Extreme loopy (MonoSLAM [1], KinectFusion [2])or small amount of
loop (McDonald et al. [3] or Whelan et al. [4])
? Therefore ElasticFusion can handle space of room size, hand-held
camera filming same object that formed multiple loop.
? Disadvantage of ElasticFusion
1. System is not yet optimized, work in restricted space
2. Could not reconstruct map correctly when connected suface information is
not enough.
[1] A. J. Davison, N. D. Molton, I. Reid, and O. Stasse., Ī░MonoSLAM: Real-Time Single Camera SLAM.,Ī▒ IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), pp.
1052-1067, 2007.
[2] R. A. Newcombe, S. Izadi, O. Hilliges, D. Molyneaux, D. Kim, A. J. Davison, P. Kohli, J. Shotton, S. Hodges, and A. Fitzgibbon., Ī░KinectFusion: Real-Time Dense Surface Mapping and
Tracking.,Ī▒ In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), 2011.
[3] J. B. McDonald, M. Kaess, C. Cadena, J. Neira, and J. J., Ī░Real-time 6-DOF multi-session visual SLAM,Ī▒ Robotics and Autonomous Systems, pp. 1144-1158, 2013.
[4] T. Whelan, M. Kaess, H. Johannsson, M. F. Fallon, J. J. Leonard, and J. B. McDonald., Ī░Real-time large scale dense RGB-D SLAM with volumetric fusion.,Ī▒ International Journal of
Robotics Research (IJRR), pp. 34(4-5):598-626, 2015.
2016/12/13 33](https://image.slidesharecdn.com/sss-180608081433/85/3D-SLAM-introcution-current-status-33-320.jpg)








3D SLAM introcution& current status
- 1. 3D SLAM introcution & current status Jan. 2017 Jacky Liu
- 2. Contents 1. What is SLAMŻ┐ 2. Sensor 3. Open-source SLAM projects 4. Applications 2016/12/13 2
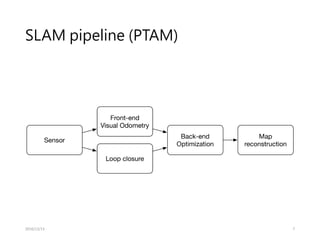
- 3. What is SLAMŻ┐ SLAM framework Visual odometry Optimization Loop closure Map reconstruction SLAM pre-processing 2016/12/13 3
- 4. What is SLAMŻ┐ ?SLAM (Simultaneous Localization and Mapping) 2016/12/13 4
- 8. Sensor and 3D imaging tech 2016/12/13 8
- 9. Sensor Laser ? Accurate ? Fast ? Long research history ? Heavy ? Expensive ? Ex. SICK, Velodyne, Rplidar Camera ? Light-weight ? Cheap ? Rich information ? High computational complexity ? Strong assumption to env. ? Easy affect by noise ? Ex. Mono, Stereo, RGB-D 2016/12/13 9
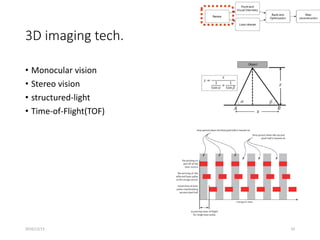
- 10. 3D imaging tech. ? Monocular vision ? Stereo vision ? structured-light ? Time-of-Flight(TOF) 2016/12/13 10
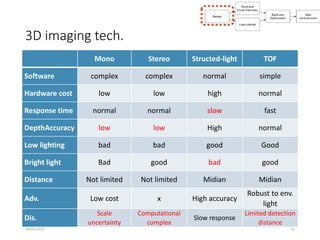
- 11. 3D imaging tech. Mono Stereo Structed-light TOF Software complex complex normal simple Hardware cost low low high normal Response time normal normal slow fast DepthAccuracy low low High normal Low lighting bad bad good Good Bright light Bad good bad good Distance Not limited Not limited Midian Midian Adv. Low cost x High accuracy Robust to env. light Dis. Scale uncertainty Computational complex Slow response Limited detection distance 2016/12/13 11
- 13. Visual Odometry ? According to two sequential images, estimate camera ego-motion ? Input: Point in space project to two camera ? Output: ego-motion of two camera ? Monocular: Only pixel related position, no depth info. ? StereoĪóRGB-DŻ║Get depth info directly ? Dimensions ? 2D-2DŻ║Estimate motion by to set of pixel Epipolar geometry ? 3D-2DŻ║Estimate motion by known space position and projection position. PnP ? 3D-3DŻ║Estimate motion by two set of known space point ICP 2016/12/13 13
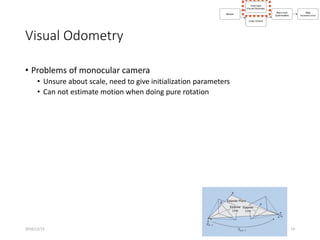
- 14. Visual Odometry ? Problems of monocular camera ? Unsure about scale, need to give initialization parameters ? Can not estimate motion when doing pure rotation 2016/12/13 14
- 15. Visual Odometry ©C Feature/Direct 2016/12/13 15
- 16. Visual Odometry ©C Feature (Main stream) ? Feature ? SIFTĪóORB ? Key-pointĪóDescriptor ? Algorithm procedure 1. Get feature point and descriptor from image 2. Matching current image with last image 3. Minimize projection error, estimate ego-motion of camera(PnPĪóICP) ? Disadvantage ? Feature extraction is time consume ? Feature extraction could fail ? Error matching 2016/12/13 16
- 17. Visual Odometry - Direct ? Photometric invariant assumption ? Sensitive to change of lighting ? No feature extraction ? Current system ? Sparse directŻ║SVO-SLAM ? Semi-dense directŻ║LSD-SLAM ? Dense directŻ║DVO-SLAM 2016/12/13 17
- 18. Visual Odometry Feature Direct Tracking Feature descriptor (100-1000 corner or surface) pixel Reconstruction Corner Whole image Comp. Complex Low Sparse ©C Low Dense - High Inconsistence model robustness Yes No History 20 years+ 2012~ Outliers Robust Hard to remove 2016/12/13 18
- 19. Visual Odometry - Conclusion ? Visual Odometry ? Matching pixel of feature point ? According matching result calculate camera ego-motion ? Estimate pixel for feature point position in global map ? Imperfect ? Result is noisy => Global optimization ? Accumulate error => Loop closure ? Loss(Camera moving too fast or been blocked) => Re-localization 2016/12/13 19
- 21. Optimization ? Two major methods ? FilterŻ║Kalman Filter, EKF, PF, RBPF, UKF ? Non-linear optimizationŻ║Graph optimization , Factor graph ? Graph optimization software packages ? g2oĪóiSAM 2016/12/13 21
- 23. Loop closure ? Recognize visited location ? Error of visual odometry will gradually accumulate ? Use revisit clue to fix error 2016/12/13 23
- 24. Loop closure ? Bag-of-Words ? Process ? Separate nose, eyes, mouse ? Build dictionary ? Face = eye*2 + nose*1 + mouse*1 ? Feature => Words 2016/12/13 24
- 25. Loop closure ? Advantage of visual SLAM ? Compare to Laser, visual SLAM system has richer information, which could increase accuracy. False Positive False Negative 2016/12/13 25
- 27. Map reconstruction ? Different purpose, different Map ? Metric map ? Topological map ? Others ? Purpose ? Navigation, localization, interaction, recognition, viewing ? Good map ? Accurate, fast 2016/12/13 27
- 29. Open-source SLAM projects 3D imaging tech Pre-processing Kintinuous(2015) RGB-D Direct ElasticFusion(2015) RGB-D Direct RGBD-SLAM-V2 RGB-D feature ORB-SLAM (2016) Mono/Stereo/RGB-D feature LSD-SLAM (2015) Mono/Stereo Direct SVO (2014) Mono feature RTAB-Map(2013) RGB-D Feature (SIFT) DVO-SLAM (2013) RGB-D Direct KinectFusion (2011) RGB-D Direct Kinfu Large Scale RGB-D Direct DTAM (2011) Mono Direct GoogleCartographer(2016) Laser/LIDAR GoogleTango RGB-D feature Hector-SLAM 2D Laser 2016/12/13 29
- 30. Kintinuous ? SourceŻ║ https://github.com/mp3guy/Kintinuous ? Hardware requirementŻ║ ? CPUŻ║Intel i5+ ? GPUŻ║NVidia 1TFLOPS+ ? OSŻ║ Ubuntu 14.04Īó15.04Īó16.04 ? Dependency(main)Ż║ OpenGLĪóCUDA7.0+ĪóOpenNI2ĪóEigenĪó BoostĪóOpenCVĪóDBoW2ĪóiSAM 2016/12/13 30
- 31. Kintinuous ? Kintinuous improve 3 main problems of KinectFusion 1. Restriction to a fixed small area in space 2. Reliance on geometric information alone for camera pose estimation 3. no means of explicitly incorporating loop closures ? Disadvantage of Kintinuous 1. Need GPU 2. Strip loop closure, incapable of large amount of loop closure 3. Only support ASUS Xtion pro live camera now, canĪ»t use Microsoft Kinect 2016/12/13 31
- 32. ElasticFusion ? SourceŻ║ https://github.com/mp3guy/ElasticFusion ? Hardware requirementŻ║ ? CPUŻ║Intel i7+ ? GPUŻ║NVidia 3.5TFLOPS+ ? OSŻ║ ? Ubuntu 14.04Īó15.04Īó16.04 ? Windows7/10with Visual Studio2013 Update5 ? Dependency(main)Ż║ OpenGLĪóCUDA7.0+ĪóOpenNI2ĪóEigen 2016/12/13 32
- 33. ElasticFusion ? ElasticFusion improve two extreme of furmer SLAM systems ©C Extreme loopy (MonoSLAM [1], KinectFusion [2])or small amount of loop (McDonald et al. [3] or Whelan et al. [4]) ? Therefore ElasticFusion can handle space of room size, hand-held camera filming same object that formed multiple loop. ? Disadvantage of ElasticFusion 1. System is not yet optimized, work in restricted space 2. Could not reconstruct map correctly when connected suface information is not enough. [1] A. J. Davison, N. D. Molton, I. Reid, and O. Stasse., Ī░MonoSLAM: Real-Time Single Camera SLAM.,Ī▒ IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), pp. 1052-1067, 2007. [2] R. A. Newcombe, S. Izadi, O. Hilliges, D. Molyneaux, D. Kim, A. J. Davison, P. Kohli, J. Shotton, S. Hodges, and A. Fitzgibbon., Ī░KinectFusion: Real-Time Dense Surface Mapping and Tracking.,Ī▒ In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), 2011. [3] J. B. McDonald, M. Kaess, C. Cadena, J. Neira, and J. J., Ī░Real-time 6-DOF multi-session visual SLAM,Ī▒ Robotics and Autonomous Systems, pp. 1144-1158, 2013. [4] T. Whelan, M. Kaess, H. Johannsson, M. F. Fallon, J. J. Leonard, and J. B. McDonald., Ī░Real-time large scale dense RGB-D SLAM with volumetric fusion.,Ī▒ International Journal of Robotics Research (IJRR), pp. 34(4-5):598-626, 2015. 2016/12/13 33
- 34. ORB-SLAM2 ? SourceŻ║ https://github.com/raulmur/ORB_SLAM2 ? Hardware requirementŻ║ ? CPUŻ║Intel i7+ ? OSŻ║ Ubuntu 14.04Īó15.04Īó16.04 ? Dependency(main)Ż║ OpenCVĪóEigen3ĪóDBoW2Īóg2o 2016/12/13 34
- 35. ORB-SLAM2 ? Based on sparse feature point ? Input: Mono, stereo, RGB-D camera ? No need of GPU ? Still under maintenance, good for future development ? Disadvantage of ORB-SLAM2 1. Stereo and RGB-D application is not good enough(no point cloud) 2. Spend time to load dictionary 3. Frame rate <=10Hz, Microsoft Kinect2 qHD(950x540), ThinkPad T450 4. Not yet support map saving or loading 2016/12/13 35
- 36. LSD-SLAM ? SourceŻ║ http://github.com/tum-vision/lsd_slam ? Hardware requirementŻ║ ? CPUŻ║Could run on mobile phone ? OSŻ║ Ubuntu 14.04Īó15.04Īó16.04 2016/12/13 36
- 37. LSD-SLAM ? Monocular camera ? Semi-dense depth map ? High computational efficiency (even could run on mobile phone) ? Capable of dealing with multiple loop and large scene ? Disadvantage of LSD-SLAM 1. Sensitive to lighting (direct method) 2. Localization error is 5~10 times of ORB-SLAM 3. Smooth camera movement assumption => matching will fail with the camera moving too fast. 4. Assume no moving object 2016/12/13 37
- 38. Google projects 2016/12/13 38 Tango Cartographer
- 40. Applications ? Robot ? Navigation ? Object picking ? Moving in complex environment ? Consumer ? Device could sensor environment ? VR/AR applications 2016/12/13 40