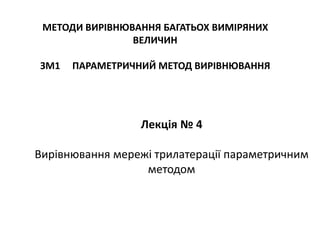








![–Ě–į –Ĺ–į—Ā—ā—É–Ņ–Ĺ–ĺ–ľ—É –Ķ—ā–į–Ņ—Ė –∑–ī—Ė–Ļ—Ā–Ĺ—é—Ē–ľ–ĺ –Ņ–Ķ—Ä–Ķ—Ö—Ė–ī –≤—Ė–ī 11 —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –∑–≥—Ė–ī–Ĺ–ĺ –į–Ľ–≥–ĺ—Ä–ł—ā–ľ—É —Ā–Ņ–ĺ—Ā–ĺ–Ī—É
–Ĺ–į–Ļ–ľ–Ķ–Ĺ—ą–ł—Ö –ļ–≤–į–ī—Ä–į—ā—Ė–≤. –ó —Ä—Ė—ą–Ķ–Ĺ–Ĺ—Ź –Ĺ–ĺ—Ä–ľ–į–Ľ—Ć–Ĺ–ł—Ö —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –∑–Ĺ–į—Ö–ĺ–ī–ł–ľ–ĺ 9 –Ĺ–Ķ–≤—Ė–ī–ĺ–ľ–ł—Ö (–Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ
–≤ –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ—Ė –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Ź–ļ—Ė –≤–ł–∑–Ĺ–į—á–į—é—ā—Ć—Ā—Ź)
–Ę–į–Ī–Ľ–ł—Ü—Ź –ļ–ĺ–Ķ—Ą—Ė—Ü—Ė—Ē–Ĺ—ā—Ė–≤ —Ė –≤—Ė–Ľ—Ć–Ĺ–ł—Ö —á–Ľ–Ķ–Ĺ—Ė–≤ –Ĺ–ĺ—Ä–ľ–į–Ľ—Ć–Ĺ–ł—Ö —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć
a] b] c] d] e] f] g] h] i] l] S]
[a 13,9529 0 0 -1,8939 -0,8627 -0,7978 0,056 0 0 0 10,4545
[b 1,8897 0,9725 -0,5826 -0,4931 0 0 -0,3075 -0,461 -1,369 -0,352
[c 1,1103 -0,4931 -0,4174 0 0 -0,4615 -0,692 -0,024 -0,0063
[d 2,2856 0,922 -0,0162 0,1264 -0,8106 -0,391 0 -0,8543
[e 2,7144 0,1264 -0,983 -0,3919 -0,189 0 0,4246
[f 1,5044 0,3037 -0,4930 -0,500 0 0,1274
[g 1,4956 -0,5000 -0,507 0 -0,0089
[h 2,3329 0,9062 0,2639 0,0098
[i 1,6671 0,1638 -0,0061
[pl 1,973 0,4787
[ps 10,2673](https://image.slidesharecdn.com/l4-200507200632/85/_4-10-320.jpg)



–õ–Ķ–ļ—Ü—Ė—Ź≥Ś4
- 1. –õ–Ķ–ļ—Ü—Ė—Ź ‚ĄĖ 4 –í–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–Ĺ—Ź –ľ–Ķ—Ä–Ķ–∂—Ė —ā—Ä–ł–Ľ–į—ā–Ķ—Ä–į—Ü—Ė—ó –Ņ–į—Ä–į–ľ–Ķ—ā—Ä–ł—á–Ĺ–ł–ľ –ľ–Ķ—ā–ĺ–ī–ĺ–ľ –ú–ē–Ę–ě–Ē–ė –í–ė–†–Ü–í–Ě–ģ–í–ź–Ě–Ě–Į –Ď–ź–ď–ź–Ę–¨–ě–• –í–ė–ú–Ü–†–Į–Ě–ė–• –í–ē–õ–ė–ß–ė–Ě –ó–ú1 –ü–ź–†–ź–ú–ē–Ę–†–ė–ß–Ě–ė–ô –ú–ē–Ę–ě–Ē –í–ė–†–Ü–í–Ě–ģ–í–ź–Ě–Ě–Į
- 2. –†–ł—Ā—É–Ĺ–ĺ–ļ 1 ‚Äď –°—Ö–Ķ–ľ–į –ľ–Ķ—Ä–Ķ–∂—Ė —ā—Ä–ł–Ľ–į—ā–Ķ—Ä–į—Ü—Ė—ó –Ę–į–Ī–Ľ–ł—Ü—Ź 1 ‚Äď –í–ł–ľ—Ė—Ä—Ź–Ĺ—Ė –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –ī–ĺ–≤–∂–ł–Ĺ —Ā—ā–ĺ—Ä—Ė–Ĺ ‚ĄĖ —Ā—ā–ĺ—Ä—Ė–Ĺ –ľ–Ķ—Ä–Ķ–∂—Ė –ö—Ė–Ĺ—Ü–Ķ–≤—Ė –Ņ—É–Ĺ–ļ—ā–ł —Ā—ā–ĺ—Ä—Ė–Ĺ –í–ł–ľ—Ė—Ä—Ź–Ĺ—Ė —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł Si,–ľ 1 1-2 7637,62 2 2-4 5615,18 3 1-4 4152,4 4 1-5 4046,4 5 4-5 2020,91 6 5-6 5714,11 7 4-6 4742,55 8 3-6 4273,22 9 3-4 8698,76 10 2-3 7869,8 11 2-6 6473,66 –í–ł–Ī—Ė—Ä –≤–į—Ä—Ė–į–Ĺ—ā—É: Si +n, –ī–Ķ n ‚Äď –Ĺ–ĺ–ľ–Ķ—Ä –Ņ–ĺ —Ā–Ņ–ł—Ā–ļ—É –≤ —Ā–į–Ĺ—ā–ł–ľ–Ķ—ā—Ä–į—Ö. –Į–ļ –ī–ĺ–ī–į—ā–ļ–ĺ–≤—Ė —É–ľ–ĺ–≤–ł –Ņ—Ä–ł–Ļ–ľ–Ķ–ľ–ĺ, —Č–ĺ –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –Ņ—É–Ĺ–ļ—ā—É 2, —Ź–ļ—Ė –Ĺ–Ķ –Ņ—Ė–ī–Ľ—Ź–≥–į—é—ā—Ć –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–Ĺ—é, —Ä—Ė–≤–Ĺ—Ė: X2 = 6 481139,55 –ľ; Y2 = 7 499241,33 –ľ. –Ē–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł–Ļ –ļ—É—ā –Ľ—Ė–Ĺ—Ė—ó 2 ‚Äď 1, —Ź–ļ–ł–Ļ –ĺ—Ä—Ė—Ē–Ĺ—ā—É—Ē –≤–ł—Ä—Ė–≤–Ĺ—Ź–Ĺ—É –ľ–Ķ—Ä–Ķ–∂—É –≤ –Ņ–Ľ–ĺ—Č–ł–Ĺ—Ė –ď–į—É—Ā–į, —ā–į–ļ–ĺ–∂ –Ĺ–Ķ –Ņ—Ė–ī–Ľ—Ź–≥–į—Ē –∑–ľ—Ė–Ĺ—Ė, –Ī—É–ī–Ķ–ľ–ĺ –≤–≤–į–∂–į—ā–ł —Ä—Ė–≤–Ĺ–ł–ľ őĪ21 = 70¬į 30 ŐĀ 31 ŐĀ ŐĀ. –•–ĺ–ī–ĺ–≤—É –Ľ—Ė–Ĺ—Ė—é –ī–Ľ—Ź –ĺ–Ī—á–ł—Ā–Ľ–Ķ–Ĺ–Ĺ—Ź –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ–ł—Ö –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł—Ö –ļ—É—ā—Ė–≤ –Ņ—Ä–ĺ–≤–Ķ–ī–Ķ–ľ–ĺ —á–Ķ—Ä–Ķ–∑ –Ņ—É–Ĺ–ļ—ā–ł 2 ‚Äď 1 ‚Äď 5 ‚Äď 4 ‚Äď 6 ‚Äď 3 ‚Äď 2 .
- 3. –£ –∑–į–≥–į–Ľ—Ć–Ĺ–ĺ–ľ—É, –Ņ—Ä–ĺ—Ü–Ķ—Ā –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–Ĺ—Ź –ľ–Ķ—Ä–Ķ–∂—Ė —ā—Ä–ł–Ľ–į—ā–Ķ—Ä–į—Ü—Ė—ó –Ņ–į—Ä–į–ľ–Ķ—ā—Ä–ł—á–Ĺ–ł–ľ –ľ–Ķ—ā–ĺ–ī–ĺ–ľ —Ā–ļ–Ľ–į–ī–į—Ē—ā—Ć—Ā—Ź –∑ —ā–į–ļ–ł—Ö –Ķ—ā–į–Ņ—Ė–≤: 1) –ĺ–Ī—á–ł—Ā–Ľ–Ķ–Ĺ–Ĺ—Ź –Ņ–ĺ–Ņ–Ķ—Ä–Ķ–ī–Ĺ—Ė—Ö –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā –≤–ł–∑–Ĺ–į—á—É–≤–į–Ĺ–ł—Ö –Ņ—É–Ĺ–ļ—ā—Ė–≤; 2) —Ä–ĺ–∑–≤‚Äô—Ź–∑–ĺ–ļ –ĺ–Ī–Ķ—Ä–Ĺ–Ķ–Ĺ–ł—Ö –≥–Ķ–ĺ–ī–Ķ–∑–ł—á–Ĺ–ł—Ö –∑–į–ī–į—á, –ĺ–Ī—á–ł—Ā–Ľ–Ķ–Ĺ–Ĺ—Ź –ļ–ĺ–Ķ—Ą—Ė—Ü—Ė—Ē–Ĺ—ā—Ė–≤ —Ė –≤—Ė–Ľ—Ć–Ĺ–ł—Ö —á–Ľ–Ķ–Ĺ—Ė–≤ —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ; 3) —Ā–ļ–Ľ–į–ī–į–Ĺ–Ĺ—Ź —ā–į —Ä–ĺ–∑–≤‚Äô—Ź–∑–į–Ĺ–Ĺ—Ź –Ĺ–ĺ—Ä–ľ–į–Ľ—Ć–Ĺ–ł—Ö —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć; 4) –ĺ–Ī—á–ł—Ā–Ľ–Ķ–Ĺ–Ĺ—Ź –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Ź–ļ—Ė –≤–ł–∑–Ĺ–į—á–į—é—ā—Ć —Ė –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ —É –≤–ł–ľ—Ė—Ä—Ź–Ĺ—Ė —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł; 5) –ĺ—Ü—Ė–Ĺ–ļ–į —ā–ĺ—á–Ĺ–ĺ—Ā—ā—Ė –≤–ł–ļ–ĺ–Ĺ–į–Ĺ–ł—Ö –≤–ł–ľ—Ė—Ä—Ė–≤.
- 4. –†—Ė–≤–Ĺ—Ź–Ĺ–Ĺ—Ź –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ –ī–Ľ—Ź –≤–ł–ľ—Ė—Ä—Ź–Ĺ–ĺ—ó —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –≤–ł–≥–Ľ—Ź–ī–į—Ē —ā–į–ļ: Vki = - aki ő∂k ‚Äď bki ő∑k + aki ő∂i + bki ő∑i + lki , (1) –ī–Ķ ő∂ —Ė ő∑ –Ņ–ĺ–Ņ—Ä–į–≤–ļ–ł –≤ –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ—Ė –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Ź–ļ—Ė –≤–ł–∑–Ĺ–į—á–į—é—ā—Ć (–Ņ–į—Ä–į–ľ–Ķ—ā—Ä–ł) aki = cos őĪki bki = sin őĪki lki = S¬įki ‚Äď S ŐĀki, –ī–Ķ S¬įki ‚Äď —Ā—ā–ĺ—Ä–ĺ–Ĺ–į –ĺ–Ī—á–ł—Ā–Ľ–Ķ–Ĺ–į –∑–į –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ–ł–ľ–ł –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–į–ľ–ł –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Ź–ļ—Ė –≤–ł–∑–Ĺ–į—á–į—é—ā—Ć; S ŐĀki ‚Äď –≤–ł–ľ—Ė—Ä—Ź–Ĺ–į —Ā—ā–ĺ—Ä–ĺ–Ĺ–į. –ě—ā–∂–Ķ, –ī–Ľ—Ź –Ņ–ĺ–Ī—É–ī–ĺ–≤–ł —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ (1) –Ņ–ĺ—ā—Ä—Ė–Ī–Ĺ–ĺ –∑–Ĺ–į–Ļ—ā–ł –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ—Ė (–Ņ–ĺ–Ņ–Ķ—Ä–Ķ–ī–Ĺ—Ė) –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Ź–ļ—Ė –Ĺ–Ķ–≤—Ė–ī–ĺ–ľ—Ė.
- 5. –ě–Ī—á–ł—Ā–Ľ–Ķ–Ĺ–Ĺ—Ź –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ–ł—Ö –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā –Ņ—É–Ĺ–ļ—ā—Ė–≤ 1) –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā ¬ę—ā–≤–Ķ—Ä–ī–ĺ–≥–嬼 –Ņ—É–Ĺ–ļ—ā—É, —Ź–ļ—Ė –Ĺ–Ķ –Ņ—Ė–ī–Ľ—Ź–≥–į—é—ā—Ć –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–Ĺ—é (X2;Y2). 2) ¬Īőł=‚ąĎL, (—Ź–ļ—Č–ĺ –≤–Ĺ—É—ā—Ä—Ė—ą–Ĺ—Ė–Ļ –ļ—É—ā –ľ–Ķ—Ä–Ķ–∂—Ė —Ē –Ņ—Ä–į–≤–ł–ľ (-), –į —Ź–ļ—Č–ĺ –Ľ—Ė–≤–ł–ľ (+)) 3) őĪ0=őĪ—Ė¬Ī180¬į (őĪ—Ė>180¬į ‚Äď ‚Äú‚Äď180¬į‚Äú, őĪ—Ė<180¬į ‚Äď ‚Äú+180¬į‚Äú) , –ī–Ķ őĪ—Ė-1 ‚Äď –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł–Ļ –ļ—É—ā –Ņ–ĺ–Ņ–Ķ—Ä–Ķ–ī–Ĺ—Ć–ĺ—ó –Ľ—Ė–Ĺ—Ė—ó. 4) őĪ=őĪ0¬Īőł 5) S ŐĀki2 = őĒx2+ őĒy2
- 6. cos őĪi = (- a¬≤ + b2 + c¬≤) / 2bc cos ő≤i = (a¬≤ - b¬≤ + c¬≤) / 2ac cos ő≥i = (a¬≤ + b¬≤ - c¬≤) / 2ab (2) –ó–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –ļ—É—ā—Ė–≤ őĪi, ő≤i, ő≥i, –∑–į–∑–Ĺ–į—á–Ķ–Ĺ–ł—Ö —É —ā–į–Ī–Ľ–ł—Ü—Ė –ľ–ĺ–∂—É—ā—Ć –Ī—É—ā–ł –ĺ—ā—Ä–ł–ľ–į–Ĺ—Ė –∑–į —Ą–ĺ—Ä–ľ—É–Ľ–į–ľ–ł : –Ę–į–ļ, —Ź–ļ –∑–į —É–ľ–ĺ–≤–ĺ—é –į–∑–ł–ľ—É—ā –Ľ—Ė–Ĺ—Ė–Ļ 2- 1 —ā–į –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –Ņ—É–Ĺ–ļ—ā—É 2 –Ĺ–Ķ –Ņ—Ė–ī–Ľ—Ź–≥–į—é—ā—Ć –∑–ľ—Ė–Ĺ—Ė, —ā–ĺ –ĺ—á–Ķ–≤–ł–ī–Ĺ–ĺ, —Č–ĺ –Ņ–ĺ–Ņ—Ä–į–≤–ļ–ł ő∂ —Ė ő∑, —Ź–ļ—Ė –ľ–ĺ–∂—É—ā—Ć –Ī—É—ā–ł –ĺ—ā—Ä–ł–ľ–į–Ĺ—Ė –≤ —Ä–Ķ–∑—É–Ľ—Ć—ā–į—ā—Ė –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ľ—Ć–Ĺ–ł—Ö –ĺ–Ī—á–ł—Ā–Ľ–Ķ–Ĺ—Ć –Ĺ–Ķ –Ņ–ĺ–≤–ł–Ĺ–Ĺ—Ė –≤–ł–ļ–Ľ–ł–ļ–į—ā–ł –∑–ľ—Ė–Ĺ–ł –Ĺ–į–Ņ—Ä—Ź–ľ–ļ—É –Ľ—Ė–Ĺ—Ė—ó 2 ‚Äď 1. –¶–Ķ –Ī—É–ī–Ķ –Ľ–ł—ą–Ķ —ā–ĺ–ī—Ė , –ļ–ĺ–Ľ–ł ő∂1/ő∑1 = tg őĪ12, —ā–ĺ–Ī—ā–ĺ ő∑1 = ő∂1 tg őĪ12. –Ę–ĺ–ľ—É –Ņ—Ä–ł —Ā–ļ–Ľ–į–ī–į–Ĺ–Ĺ—Ė —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ, –Ņ–ĺ–≤‚Äô—Ź–∑–į–Ĺ–ł—Ö –∑ –Ņ—É–Ĺ–ļ—ā–ĺ–ľ 1, –Ņ–ĺ–Ņ—Ä–į–≤–ļ–į ő∑1 –Ņ–ĺ–≤–ł–Ĺ–Ĺ–į –Ī—É—ā–ł –∑–ľ—Ė–Ĺ–Ķ–Ĺ–į –ī–ĺ–Ī—É—ā–ļ–ĺ–ľ —É –≤–ł–≥–Ľ—Ź–ī—Ė ő∂1 tg őĪ12. –†–ĺ–∑—Ä–į—Ö—É–Ĺ–ĺ–ļ –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ĺ–≥–ĺ –ļ—É—ā–į –∑–į –Ņ–ĺ–Ņ–Ķ—Ä–Ķ–ī–Ĺ—Ė–ľ –ļ—É—ā–ĺ–ľ —Ė 1 –Ņ—Ä —Ė 1 –Ľ 180 180 ÔÄ≠ ÔÄ≠ ÔɨÔĀ° ÔÄę ÔÄ≠ÔĀĘÔÉĮ ÔāĪÔĀĪ ÔÄĹ ÔÉ≠ ÔĀ° ÔÄ≠ ÔÄęÔĀĘÔÉĮÔÉģ o o , –ī–Ķ őĪ—Ė-1 ‚Äď –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł–Ļ –ļ—É—ā –Ņ–ĺ–Ņ–Ķ—Ä–Ķ–ī–Ĺ—Ć–ĺ—ó –Ľ—Ė–Ĺ—Ė—ó, ő≤–Ņ—Ä (ő≤–Ľ) ‚Äď –ļ—É—ā –Ņ—Ä–į–≤–ł–Ļ (–Ľ—Ė–≤–ł–Ļ).
- 7. –Ě–į–≤–Ķ–ī–Ķ–ľ–ĺ –∑ –≤—Ä–į—Ö—É–≤–į–Ĺ–Ĺ—Ź–ľ –≤–ł—Č–Ķ—Ā–ļ–į–∑–į–Ĺ–ĺ–≥–ĺ –≤–ł–≤–Ķ–ī–Ķ–Ĺ–Ĺ—Ź —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ –ī–Ľ—Ź –≤—Ā—Ė—Ö –ĺ–ī–ł–Ĺ–į–ī—Ü—Ź—ā–ł –≤–ł–ľ—Ė—Ä—Ź–Ĺ–ł—Ö –Ľ—Ė–Ĺ—Ė–Ļ –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–ĺ—ó –ľ–Ķ—Ä–Ķ–∂—Ė : –õ—Ė–Ĺ—Ė—Ź 2-1 cos őĪ2.1 ő∂1+ sin őĪ2.1 ő∑1 + l2.1 = v2.1 ; v2.1 = sec őĪ2.1 ő∂1 + l2.1. –õ—Ė–Ĺ—Ė—Ź 2-4 v2.4 = cos őĪ2.4 ő∂4+ sin őĪ2.4 ő∑4 + l2.4. –õ—Ė–Ĺ—Ė—Ź 1-4 v1.4 = - cos őĪ1.4 ő∂1 - sin őĪ1.4 tg őĪ2.1 ő∂1 + cos őĪ1.4 ő∂4 + sin őĪ1.4 ő∑4 + l1.4 –õ—Ė–Ĺ—Ė—Ź 1-5 v1.5 = - cos őĪ1.5 ő∂1 - sin őĪ1.5 tg őĪ2.1 ő∂1 + cos őĪ1.5 ő∂5 + sin őĪ1.5 ő∑5 + l1.5 –õ—Ė–Ĺ—Ė—Ź 5-4 v5.4 = - cos őĪ5.4 ő∂5 - sin őĪ5.4 ő∑5 + cos őĪ5.4 ő∂4 + sin őĪ5.4 ő∑4 + l5.4. –õ—Ė–Ĺ—Ė—Ź 5-6 v5.6 = - cos őĪ5.6 ő∂5 - sin őĪ5.6 ő∑5 + cos őĪ5.6 ő∂6 + sin őĪ5.6 ő∑6 + l5.6. –õ—Ė–Ĺ—Ė—Ź 4-6 v4.6 = - cos őĪ4.6 ő∂4 - sin őĪ4.6 ő∑4 + cos őĪ4.6 ő∂6 + sin őĪ4.6 ő∑6 + l4.6. –õ—Ė–Ĺ—Ė—Ź 6-3 v6.3 = - cos őĪ6.3 ő∂6 - sin őĪ6.3 ő∑6 + cos őĪ6.3 ő∂3 + sin őĪ6.3 ő∑3 + l6.3. –õ—Ė–Ĺ—Ė—Ź 3- 4 v3.4 = - cos őĪ3.4 ő∂3 - sin őĪ3.4 ő∂4 + cos őĪ3.4 ő∑3 + sin őĪ3.4 ő∑4 + l3.4. –õ—Ė–Ĺ—Ė—Ź 3-2 v3.2 = - cos őĪ3.2 ő∂3 - sin őĪ3.2 ő∑3 + l3.2. –õ—Ė–Ĺ—Ė—Ź 2-6 v2.6 = cos őĪ2.6 ő∂6 - sin őĪ2.6 ő∑6 + l2.6.
- 8. vki ő∂1 ő∂3 ő∑3 ő∂4 ő∑4 ő∂5 ő∑5 ő∂6 ő∑6 lki V2.1 sec őĪ 2.1 l2.1 V2.4 cos őĪ 2.4 sin őĪ 2.4 l2.4 V1.4 - cos őĪ 1.4 - sin őĪ 1.4 tg őĪ2.1 cos őĪ 1.4 sin őĪ 1.4 l1.4 V1.5 - cos őĪ 1.5 - sin őĪ 1.5 tg őĪ2.1 cos őĪ 1.5 sin őĪ 1.5 l1.5 V5.4 cos őĪ 5.4 sin őĪ 5.4 - cos őĪ 5.4 - sin őĪ 5.4 l5.4 V5.6 - cos őĪ 5.6 - sin őĪ 5.6 cos őĪ 5.6 sin őĪ 5.6 l5.6 V4.6 - cos őĪ 4.6 - sin őĪ 4.6 cos őĪ 4.6 sin őĪ 4.6 l4.6 V6.3 cos őĪ 6.3 sin őĪ 6.3 - cos őĪ 6.3 - sin őĪ 6.3 l6.3 V3.4 - cos őĪ 3.4 - sin őĪ 3.4 cos őĪ 3.4 sin őĪ 3.4 l3.4 V3.2 - cos őĪ 3.2 - sin őĪ 3.2 l3.2 V2.6 cos őĪ 2.6 sin őĪ 2.6 l2.6 –ö–ĺ–Ķ—Ą—Ė—Ü—Ė—Ē–Ĺ—ā–ł —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ –≤ –∑–į–≥–į–Ľ—Ć–Ĺ–ĺ–ľ—É –≤–ł–≥–Ľ—Ź–ī—Ė
- 9. –ö–ĺ–Ķ—Ą—Ė—Ü—Ė—Ē–Ĺ—ā–ł —Ė –≤—Ė–Ľ—Ć–Ĺ—Ė —á–Ľ–Ķ–Ĺ–ł —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ ‚ĄĖ –õ—Ė–Ĺ—Ė—ó ő∂1 / a ő∂3 / b ő∑3 / c ő∂4 / d ő∑4 /e ő∂5 / f ő∑5 / g ő∂6 / h ő∑6 / i lki S v 1 2 - 1 2,997 0 2,997 0,028 2 2 ‚Äď 4 -0,219 0,967 0 0,757 -0,001 3 1 - 4 2,091 -0,910 -0,415 0 0,756 -0,057 4 1 - 5 0,800 -0,998 0,070 0 -0,128 0,014 5 5 - 4 -0,127 -0,992 -0,127 0,992 0 0 -0,042 6 5 - 6 0,702 0,712 -0,702 -0,712 0 0 0,054 7 4 - 6 -0,900 -0,435 0 0 0,071 8 6 - 3 -0,555 -0,832 0,550 0,832 0 0 0,113 9 3 - 4 -0,763 -0,646 0,763 0,646 0 0 -0,146 10 3 - 2 -1,000 -0,018 1,340 0,822 0,048 11 2 - 6 -0,850 0,527 0,250 -0,073 -0,046 ‚ąĎ 5,878 -2,318 -1,496 0,661 0,650 -0,423 1,774 -1,897 0,212 1,590 4,631 ‚ąĎv¬≤=0,054 2 –ó–Ĺ–į—á. –Ĺ–Ķ–≤—Ė–ī–ĺ –ľ–ł—Ö 0,0095 1,3135 - 1,2176 0,0773 0,0160 - 0,0390 - 0,0412 0,1558 - 0,3096 - - -
- 10. –Ě–į –Ĺ–į—Ā—ā—É–Ņ–Ĺ–ĺ–ľ—É –Ķ—ā–į–Ņ—Ė –∑–ī—Ė–Ļ—Ā–Ĺ—é—Ē–ľ–ĺ –Ņ–Ķ—Ä–Ķ—Ö—Ė–ī –≤—Ė–ī 11 —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –∑–≥—Ė–ī–Ĺ–ĺ –į–Ľ–≥–ĺ—Ä–ł—ā–ľ—É —Ā–Ņ–ĺ—Ā–ĺ–Ī—É –Ĺ–į–Ļ–ľ–Ķ–Ĺ—ą–ł—Ö –ļ–≤–į–ī—Ä–į—ā—Ė–≤. –ó —Ä—Ė—ą–Ķ–Ĺ–Ĺ—Ź –Ĺ–ĺ—Ä–ľ–į–Ľ—Ć–Ĺ–ł—Ö —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć –∑–Ĺ–į—Ö–ĺ–ī–ł–ľ–ĺ 9 –Ĺ–Ķ–≤—Ė–ī–ĺ–ľ–ł—Ö (–Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ –≤ –Ĺ–į–Ī–Ľ–ł–∂–Ķ–Ĺ—Ė –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Ź–ļ—Ė –≤–ł–∑–Ĺ–į—á–į—é—ā—Ć—Ā—Ź) –Ę–į–Ī–Ľ–ł—Ü—Ź –ļ–ĺ–Ķ—Ą—Ė—Ü—Ė—Ē–Ĺ—ā—Ė–≤ —Ė –≤—Ė–Ľ—Ć–Ĺ–ł—Ö —á–Ľ–Ķ–Ĺ—Ė–≤ –Ĺ–ĺ—Ä–ľ–į–Ľ—Ć–Ĺ–ł—Ö —Ä—Ė–≤–Ĺ—Ź–Ĺ—Ć a] b] c] d] e] f] g] h] i] l] S] [a 13,9529 0 0 -1,8939 -0,8627 -0,7978 0,056 0 0 0 10,4545 [b 1,8897 0,9725 -0,5826 -0,4931 0 0 -0,3075 -0,461 -1,369 -0,352 [c 1,1103 -0,4931 -0,4174 0 0 -0,4615 -0,692 -0,024 -0,0063 [d 2,2856 0,922 -0,0162 0,1264 -0,8106 -0,391 0 -0,8543 [e 2,7144 0,1264 -0,983 -0,3919 -0,189 0 0,4246 [f 1,5044 0,3037 -0,4930 -0,500 0 0,1274 [g 1,4956 -0,5000 -0,507 0 -0,0089 [h 2,3329 0,9062 0,2639 0,0098 [i 1,6671 0,1638 -0,0061 [pl 1,973 0,4787 [ps 10,2673
- 11. –Ě–į–Ļ—Ė–ľ–ĺ–≤—Ė—Ä–Ĺ—Ė—ą—Ė –Ņ–ĺ–Ņ—Ä–į–≤–ļ–ł V –ī–ĺ–≤–∂–ł–Ĺ–ł —Ā—ā–ĺ—Ä—Ė–Ĺ –∑–Ĺ–į—Ö–ĺ–ī—Ź—ā—Ć –Ņ—Ė–ī—Ā—ā–į–Ĺ–ĺ–≤–ļ–ĺ—é –∑–Ĺ–į–Ļ–ī–Ķ–Ĺ–ł—Ö –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ ő∂ —Ė ő∑ –≤ —Ä—Ė–≤–Ĺ—Ź–Ĺ–Ĺ—Ź –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ (1). –í–ł—Ä—Ė–≤–Ĺ—Ź–Ĺ—Ė (–ļ—Ė–Ĺ—Ü–Ķ–≤—Ė) –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź —Ā—ā–ĺ—Ä—Ė–Ĺ –∑–Ĺ–į—Ö–ĺ–ī—Ź—ā—Ć —ą–Ľ—Ź—Ö–ĺ–ľ –ī–ĺ–ī–į–≤–į–Ĺ–Ĺ—Ź –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ V –ī–ĺ –≤–ł–ľ—Ė—Ä—Ź–Ĺ–ł—Ö —Ā—ā–ĺ—Ä—Ė–Ĺ. –Ē–Ľ—Ź –ĺ—Ü—Ė–Ĺ—é–≤–į–Ĺ–Ĺ—Ź —ā–ĺ—á–Ĺ–ĺ—Ā—ā—Ė –Ņ–Ķ—Ä—ą –∑–į –≤—Ā–Ķ –∑–Ĺ–į—Ö–ĺ–ī—Ź—ā—Ć —Ā–Ķ—Ä–Ķ–ī–Ĺ—é –ļ–≤–į–ī—Ä–į—ā–ł—á–Ĺ—É –Ņ–ĺ—Ö–ł–Ī–ļ—É –≤–ł–ľ—Ė—Ä—É —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –∑–į —Ą–ĺ—Ä–ľ—É–Ľ–ĺ—é: ÔĀõ ÔĀĚ ÔÄ® ÔÄ© ÔÄ® ÔÄ©m vv / n k 0,0542 / 11 9 0,17 –ľÔÄĹ ÔÄ≠ ÔÄĹ ÔÄ≠ ÔÄĹ –ī–Ķ n ‚Äď –ļ—Ė–Ľ—Ć–ļ—Ė—Ā—ā—Ć –≤–ł–ľ—Ė—Ä—Ė–≤; k ‚Äď –ļ—Ė–Ľ—Ć–ļ—Ė—Ā—ā—Ć –Ņ–į—Ä–į–ľ–Ķ—ā—Ä—Ė–≤.
- 12. –í–ł–ľ—Ė—Ä—Ź–Ĺ—Ė —Ė –≤–ł—Ä—Ė–≤–Ĺ—Ź–Ĺ—Ė –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź —Ā—ā–ĺ—Ä—Ė–Ĺ –ľ–Ķ—Ä–Ķ–∂—Ė ‚ĄĖ —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –ľ–Ķ—Ä–Ķ–∂—Ė –ö—Ė–Ĺ —Ü–Ķ–≤—Ė –Ņ—É–Ĺ–ļ—ā–ł —Ā—ā–ĺ—Ä—Ė–Ĺ –í–ł–ľ—Ė—Ä—Ź –Ĺ—Ė —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł Si, –ľ –Ě–į–Ļ—Ė–ľ–ĺ–≤—Ė—Ä–Ĺ—Ė—ą—Ė –Ņ–ĺ–Ņ—Ä–į–≤–ļ–ł Vi, –ľ –ó–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –≤–ł—Ä—Ė–≤–Ĺ—Ź–Ĺ–ł—Ö —Ā—ā–ĺ—Ä—Ė–Ĺ Si, –ľ ‚ĄĖ –Ņ—É–Ĺ–ļ—ā—É –ľ–Ķ—Ä–Ķ–∂—Ė –ó–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź –≤–ł—Ä—Ė–≤–Ĺ—Ź–Ĺ–ł—Ö –Ņ–į—Ä–į–ľ–Ķ—ā—Ä—Ė–≤ (–ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā) (–•—Ė;Y—Ė), –ľ 1 2 - 1 7637,6 2 0,03 7637,65 1 6484042,03 75074441,59 2 2 ‚Äď 4 5615,1 8 0 5615,18 3 1 - 4 4152,4 0 0,06 4152,34 2 6481139,55 7499241,33 4 1 - 5 4046,4 0 0,04 4046,44 5 5 - 4 2020,9 1 0,04 2020,87 3 6481651,47 7500528,35 6 5 - 6 5714,1 1 0,05 5714,16 7 4 - 6 4742,5 5 0,07 4742,62 4 6479278,27 7503998,74 8 6 - 3 4273,2 2 0,11 4273,33 9 3 - 4 8698,7 6 0,15 8698,61 5 6480398,83 7505680,32 10 3 - 2 7869,8 0 0,05 7869,85 11 2 - 6 6473,6 6 0,05 6473,61 6 6484020,74 7504083,83
- 13. –ü—Ä–ł –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–Ĺ—Ė –ľ–Ķ—Ä–Ķ–∂—Ė —ā—Ä–ł–Ľ–į—ā–Ķ—Ä–į—Ü—Ė—ó –Ņ–į—Ä–į–ľ–Ķ—ā—Ä–ł—á–Ĺ–ł–ľ –ľ–Ķ—ā–ĺ–ī–ĺ–ľ, –ĺ–ī–Ķ—Ä–∂–į–Ĺ—Ė –Ņ–ĺ–Ņ—Ä–į–≤–ļ–ł –ī–ĺ–ī–į—é—ā—Ć—Ā—Ź –ī–ĺ –ī–ĺ–≤–∂–ł–Ĺ —Ā—ā–ĺ—Ä—Ė–Ĺ –ľ–Ķ—Ä–Ķ–∂—Ė –Ē–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł–Ļ –ļ—É—ā –Ĺ–į—Ā—ā—É–Ņ–Ĺ–ĺ—ó —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł —Ä—Ė–≤–Ĺ–ł–Ļ –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ĺ–ľ—É –ļ—É—ā—É –Ņ–ĺ–Ņ–Ķ—Ä–Ķ–ī–Ĺ—Ć–ĺ—ó —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –Ņ–Ľ—é—Ā 180¬į —ā–į –ľ—Ė–Ĺ—É—Ā –ļ—É—ā, —Č–ĺ –Ľ–Ķ–∂–ł—ā—Ć —Ā–Ņ—Ä–į–≤–į –Ņ–ĺ —Ö–ĺ–ī—É –Į–ļ—Č–ĺ –∑–į–ī–į–Ĺ–ĺ –Ņ–ĺ—á–į—ā–ļ–ĺ–≤—Ė —ā–į –ļ—Ė–Ĺ—Ü–Ķ–≤—Ė –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –Ņ—É–Ĺ–ļ—ā—Ė–≤ —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł K—Ė, —ā–ĺ –ī–ĺ–≤–∂–ł–Ĺ—É –ī–į–Ĺ–ĺ—ó —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –ľ–ĺ–∂–Ĺ–į –≤–ł–∑–Ĺ–į—á–ł—ā–ł –∑–į —ā–Ķ–ĺ—Ä–Ķ–ľ–ĺ—é –ü—Ė—Ą–į–≥–ĺ—Ä–į –í—Ö—Ė–ī–Ĺ–ł–ľ–ł –ī–į–Ĺ–ł–ľ–ł –ī–ĺ –≤–ł—Ä—Ė—ą–Ķ–Ĺ–Ĺ—Ź –Ņ—Ä—Ź–ľ–ĺ—ó –≥–Ķ–ĺ–ī–Ķ–∑–ł—á–Ĺ–ĺ—ó –∑–į–ī–į—á—Ė —Ē –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –ĺ–ī–Ĺ–ĺ–≥–ĺ –∑ –Ņ—É–Ĺ–ļ—ā—Ė–≤ —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł, —ó—ó –ī–ĺ–≤–∂–ł–Ĺ–į —ā–į –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł–Ļ –ļ—É—ā –£ —Ä–Ķ–∑—É–Ľ—Ć—ā–į—ā—Ė —Ä–ĺ–∑–≤'—Ź–∑–ļ—É –Ņ—Ä—Ź–ľ–ĺ—ó –≥–Ķ–ĺ–ī–Ķ–∑–ł—á–Ĺ–ĺ—ó –∑–į–ī–į—á—Ė –ĺ–ī–Ķ—Ä–∂—É—é—ā—Ć –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –ī—Ä—É–≥–ĺ–≥–ĺ (–Ĺ–Ķ–≤—Ė–ī–ĺ–ľ–ĺ–≥–ĺ) –Ņ—É–Ĺ–ļ—ā—É —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –í—Ö—Ė–ī–Ĺ–ł–ľ–ł –ī–į–Ĺ–ł–ľ–ł –ī–ĺ –≤–ł—Ä—Ė—ą–Ķ–Ĺ–Ĺ—Ź –ĺ–Ī–Ķ—Ä–Ĺ–Ķ–Ĺ–ĺ—ó –≥–Ķ–ĺ–ī–Ķ–∑–ł—á–Ĺ–ĺ—ó –∑–į–ī–į—á—Ė —Ē: –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –ļ—Ė–Ĺ—Ü–Ķ–≤–ł—Ö –Ņ—É–Ĺ–ļ—ā—Ė–≤ —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł –£ —Ä–Ķ–∑—É–Ľ—Ć—ā–į—ā—Ė —Ä–ĺ–∑–≤'—Ź–∑–ļ—É –ĺ–Ī–Ķ—Ä–Ĺ–Ķ–Ĺ–ĺ—ó –≥–Ķ–ĺ–ī–Ķ–∑–ł—á–Ĺ–ĺ—ó –∑–į–ī–į—á—Ė –ĺ–ī–Ķ—Ä–∂—É—é—ā—Ć –ī–ĺ–≤–∂–ł–Ĺ—É —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł —ā–į —ó—ó –ī–ł—Ä–Ķ–ļ—Ü—Ė–Ļ–Ĺ–ł–Ļ –ļ—É—ā –ü—Ä–ł –≤–ł—Ä—Ė–≤–Ĺ—é–≤–į–Ĺ–Ĺ—Ź –ľ–Ķ—Ä–Ķ–∂—Ė —ā—Ä–ł–Ľ–į—ā–Ķ—Ä–į—Ü—Ė—ó, –≤–Ĺ—É—ā—Ä—Ė—ą–Ĺ—Ė –ļ—É—ā–ł —ā—Ä–ł–ļ—É—ā–Ĺ–ł–ļ—Ė–≤ –≤–ł–∑–Ĺ–į—á–į—é—ā—Ć –∑–į —ā–Ķ–ĺ—Ä–Ķ–ľ–ĺ—é –ļ–ĺ—Ā–ł–Ĺ—É—Ā—Ė–≤ –Į–ļ—Č–ĺ —á–Ķ—Ä–Ķ–∑ kx , ky —ā–į ix , iy –Ņ–ĺ–∑–Ĺ–į—á–ł—ā–ł –Ĺ–į–Ļ—Ė–ľ–ĺ–≤—Ė—Ä–Ĺ—Ė—ą—Ė –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā–ł –ī–≤–ĺ—Ö –Ī—É–ī—Ć-—Ź–ļ–ł—Ö —Ā—É—Ā—Ė–ī–Ĺ—Ė—Ö –Ņ—É–Ĺ–ļ—ā—Ė–≤, —Č–ĺ –≤—Ö–ĺ–ī—Ź—ā—Ć –≤ –ľ–Ķ—Ä–Ķ–∂—É —ā—Ä–ł–Ľ–į—ā–Ķ—Ä–į—Ü—Ė—ó, —ā–ĺ —Ä—Ė–≤–Ĺ—Ź–Ĺ–Ĺ—Ź –Ņ–ĺ–Ņ—Ä–į–≤–ĺ–ļ, —Č–ĺ –≤—Ė–ī–Ņ–ĺ–≤—Ė–ī–į—Ē –ī–į–Ĺ–ł–Ļ —Ā—ā–ĺ—Ä–ĺ–Ĺ—Ė –ľ–ĺ–∂–Ĺ–į –∑–į–Ņ–ł—Ā–į—ā–ł —É –≤–ł–≥–Ľ—Ź–ī—Ė '2)(2)( kiSkyiykxixkiv ÔÄ≠ÔÄ≠ÔÄęÔÄ≠ÔÄĹ , –ī–Ķ 2)(2)( kyiykxixkiS ÔÄ≠ÔÄęÔÄ≠ÔÄĹ ‚Äď —Ü–Ķ –ī–ĺ–≤–∂–ł–Ĺ–į —Ā—ā–ĺ—Ä–ĺ–Ĺ–ł KI –≤–ł–∑–Ĺ–į—á–Ķ–Ĺ–į –∑–į –≤–ł—Ä—Ė–≤–Ĺ—Ź–Ĺ–ł–ľ–ł –∑–Ĺ–į—á–Ķ–Ĺ–Ĺ—Ź–ľ–ł –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā kx , ky —ā–į ix , iy ;