A Mimicking Human Arm with 5 DOF Controlled by LabVIEW
0 likes988 views

This document describes a 5 degree of freedom robotic arm that mimics the motion of a human arm. The robotic arm is controlled using a portable human arm that senses motion through potentiometers at each joint. The motion signals from the portable arm are sent to a LabVIEW controller via a data acquisition card. The controller then directs servo motors at each joint of the static robotic arm to mimic the movement of the portable human arm. The goal is to allow intuitive control of the robotic arm through natural movements of the user's own arm.
![IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011
ISSN: 1793-8236
A Mimicking Human Arm with 5 DOF
Controlled by LabVIEW
Basil Hamed
discomfort for non-experts. Moreover, in most of the cases
AbstractŌĆöIn this paper, a proposed design of 5 DOF arm the user should be trained to map his/her action (i.e. three
robot is presented; each of the armŌĆÖs joints will be generated dimensions motion of a joystick) to the resulted motion of the
by the corresponding human armŌĆÖs joints . The paper will robot. In this paper, a new mean of interface is proposed,
present a full design of a robot arm that mimics the human arm
motion. Also, a graphical simulator will be designed to mimic
according to which, the user can directly control 5 DOF a
the human arm simultaneously with the mechanical robot arm. robot arm, by performing natural motions with his/her own
Both of the arms are controlled using LabVIEW and data arm, using LabVIEW software and data acquisition card.
acquisition card NI-PCI 6024E. For control applications, The robot-arm has 5 degrees of freedom (DOF). The
LabVIEW Real-Time provide a single software development shoulder is bowing and rotating, the elbow and the wrist are
tool that can implement the functions to PC-based control only bowing and the hand itself is rotating
systems, thus acting as a programmable automation controller.
The first and foremost factor in designing the robotic arm
is the decision making of the number of DOF. This decision
Index TermsŌĆöControl, Human-Machine Interface,
LabVIEW, Data Acquisition, 5DOF, and Human Motion is mainly dependent on the task which the manipulator has to
perform and the workspace it has to cover. In simple pick and
place operations the suitable DOFs can make a system robust
I. INTRODUCTION but complicated as well. The larger the DOF the more
efficient and dexterous the manipulator is. But on the other
Among social infrastructure technologies, Robot
hand, system complication in design and control also
technology is expected to play an important role in solving
increases [7]. In this paper 5 DOF arm robot has been
the world problems. One of the most important fields in the
designed.
development of successful robotics systems is the
Human-Machine Interaction. A control system is a collection Design Criteria
The arm robot system must achieve the following design
of components working together under the direction of some
criterions:
machine intelligence [1]. Nowadays, many kinds of
The arm robot system should have compatible shape to be
mechanical arms are used in various applications such as in
suitable for human usage.
semiconductor fabrications, automobile manufacturing,
Stability of the arm robot system is the main factor that
various industries, medical operations, transportations,
reflects the quality of the design.
educations, or even in space missions [2][3]. Robots are most
useful in executing the same defined job repeatedly and in
II. SYSTEM OVERVIEW
precisely the same fashion. When working on tasks that are
continuously duplicated, these automated machines are able To achieve the design criteria, the system consists of three
to overcome certain types of errors better than humans. In parts. Figure (1) shows the main parts of the system and the
most cases, electronic circuits provide the intelligence, and flow of data from input to output passing through the
electromechanical components such as sensors and motors controller.
provide the interface to the physical world and by this work it
introduces intelligence to the system by computer providing
via LabVIEW software with Data Acquisition Card utility.
Robot arms are versatile tools found in a wide range of
applications. In recent years, applications where humans and
robot arms interact, have received increased attention. The
case where the interaction entails the human controlling a
remote robot is called robot teleoperation. The latter case
requires a user interface to translate the operator commands
to the robot. A large number of interfaces have been proposed
on this issue in previous works, where some examples of
them can be found in [4], [5], and [6]. However, most of them
involve complex mechanisms or systems of sensors, that the
user should be acquaint with, resulting to a feeling of
Figure 1. System block diagram
The following subsections explain the arm robot system
9](https://image.slidesharecdn.com/bachelor-130130073122-phpapp01/85/A-Mimicking-Human-Arm-with-5-DOF-Controlled-by-LabVIEW-1-320.jpg)
![IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011
ISSN: 1793-8236
parts in details: The static robot arm consist generally three components,
which can perform its task:
A. Portable arm
Each of the human armŌĆÖs joints will be the signal generator ŌĆó Mechanical arm: As shown in Figure (4), the
for the corresponding joint of the robotic armŌĆÖs joints. The mechanical design of the robot consists of five
portable arm shown in Figure (2) is the part responsible for parts: the base, shoulder, elbow, wrist and gripper.
sensing the human arm movements, converting these Plastic is used as the essential material to build
the static arm.
mechanical signals into electrical signals and then passing
them to the controller for processing. ŌĆó Motors: are used to move the arm to its correct
The portable arm consists of four segments with five joints position. In this paper ŌĆ£Servo motorŌĆØ is used as
shown in Figure (5).
that represent (shoulder, arm, elbow, wrist and gripper) the
real human arm. Each of these joints has ŌĆó Controller: that processes the input and makes the
mechanical-to-electrical signal transducers. The transducer robot perform its task. LabVIEW, and Data
Acquisition Card used as a controller.
should be chosen to be capable to convert mechanical motion
to electrical signal and it is preferable to be rotational
according to human's arm joints.
Figure 2. Portable arm
The material used to build the portable arm is aluminum Figure 4. Static Arm
which is preferable to plastic or other materials because itŌĆÖs
light weight, ease to fabricate, hard to broke and acceptable
appearance.
The potentiometer as shown in Figure (3) is accepted to be
the transducer at each joint of the portable arm.
Potentiometers are placed on each joint of the arm to measure
the rotation. As the joint rotates, the resistance of each sensor
varies. This resistance change in turn gives us analog
voltages which are fed in to the ADC. Limit switches are Figure 5. RC Servo Motor
placed at all joints to get the extreme positions of the links
within the workspace. Limit switches act as over-riding Servo motor
controls for the links. The potentiometer is chosen over other Servo motors (as shown in Figure (5)) were selected as
transducer especially optical encoder because it can tell the actuators to meet the force/ torque requirements, due to their
initial position of the joint at the starting point, it has better fast response and less maintenance problems [8]. Five servo
resolution than optical encoder, and it has analog input. motors have been used to drive each of the five joints.
Stepper motor or other DC motors can be used to control the
arm except that; the DC motor does not have a feedback as
servo motor does. Advantages of servo motor over other
motors:
1. The stepper motor is controlled by 4-5 digital bits
but the servo used one bit for controlling. As
known the DAQ have 8 I/O digital bit and then
can control two stepper motor only but can
control 8 servos motor.
2. Most of stepper motors does not have a feedback
line.
3. The voltage feedback servo motor is commonly
Figure 3. Potentiometer as a transducer
used for position control than encoder (pulse)
B. Static arm feedback one.
10](https://image.slidesharecdn.com/bachelor-130130073122-phpapp01/85/A-Mimicking-Human-Arm-with-5-DOF-Controlled-by-LabVIEW-2-320.jpg)
![IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011
ISSN: 1793-8236
4. The cost of the servo is feasible and appropriate. III. COMPUTER INTERFACING
Each motor can move from 0 to 180 degree and can be Data acquisition system involves gathering signals from
modified to move from 0 to 360 degree as shown in Figure measurement sources and digitizing the signal for storage,
(18), but most joint in human arm doesnŌĆÖt need 360 degree analysis and presentation on computer. The National
rotation. The motors of a robot arm can be best controlled by Instruments (NI) offers different versions for data acquisition
PWM signals, because the associated power amplifiers will cards: 6023E, 6024E, 6025E. In this paper 6024E shown in
then be able to operate in the pulsed mode which results in Figure (7), has been chosen which features 16 channels of
minimal power losses. analog input, two channels of analog output, a 68-pin
The advantage of PWM system to produce high voltage connector and eight lines of digital I/O . This board uses
and current peaks has been fully utilized to produce larger National Instruments DAQ-STC system timing controller for
torques while remaining inside the maximum continuous time-related functions. DAQ-STC consists of three timing
ratings of the motor. The current surge and voltage spike at groups that control analog input, analog output, and
startup has been catered for by the PWM control. general-purpose counter/timer functions. These groups
C. Software Control include a total of seven 24-bit and three 16-bit counters and a
The software will be divided into: maximum timing resolution of 50 ns [9]. DAQ-STC makes
1. Direct Control Mode: possible such applications as buffered pulse generation,
In this mode the user carries a portable arm which sends equivalent time sampling, and seamless changing of the
the information that represents the rotated angles for each sampling rate. Three main components to be considered in
joint to the computer through the data acquisition card the systems are [10]:
(DAQ). 1) Signals: The signals are standard logic pulses coming
The LabVIEW software program works as a processor that from the detectors.
can handle the inputs and interfacing with outputs. As said 2) DAQ hardware: DAQ hardware acts as the interface
before the input is represented by the human portable arm and between the computer and the outside world.
the output will be the static robot arm that simulates the 3) Driver and software
motion of the human arm. In addition, a graphical arm
simulation developed beside the static arm.
The program can record a motion with unlimited time by
values it captured from the input.
2. Manual Control Mode:
In this mode changes has been made on the direct mode
that increases the available options of the program and added
a new facility of control. The option is focused on controlling
the static arm by the program itself, and the inputs in this case
will be a numeric angle inputs. As mentioned above the
program can record a motion with unlimited time but here the
numeric values will play as inputs. Figure 7. DAQ 6024E and the pin connector
3. Preview & Repeat Mode: Data acquisition begins with the physical phenomenon to
This mode is for browsing a saved motion and can preview be measured. This physical phenomenon could be the
the motion or repeats this motion for a specific time. The temperature of a room, the intensity of a light source, the
motion can be break at any time. pressure inside a chamber, the force applied to an object, or
The block diagram of the robot arm with the controller is many other things. An effective DAQ system can measure all
shown in Figure (6). phenomena. The ability of DAQ system to measure different
phenomena depends on the transducer to convert the physical
phenomena into signals measurable by the DAQ hardware.
Transducers are synonymous with sensors in DAQ systems
[11].
Joint Channel Channel pin
number
Shoulder ACH0 68
Arm ACH1 33
Elbow ACH2 65
Wrist ACH3 30
Gripper ACH4 28
TABLE 1’╝Ä PORTABLE ARM & DAQ CONNECTION
Joint Channel Channel pin
number
Shoulder DCH0 52
Figure 6. Robot Arm & Controller Block Diagram
Arm DCH1 17
Elbow DCH2 49
11](https://image.slidesharecdn.com/bachelor-130130073122-phpapp01/85/A-Mimicking-Human-Arm-with-5-DOF-Controlled-by-LabVIEW-3-320.jpg)
![IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011
ISSN: 1793-8236
Wrist DCH3 47
Gripper DCH4 19
TABLE 2’╝Ä STATIC ARM ŌĆō DAQ INTERFACING
All these features served the arm robotic system to perform
its task.
The portable arm has five joints so it will have five signals
and these signals need five analog input channels of DAQ.
Table 1 shows the name of the joint and its corresponding
input channel in DAQ as connected.
The operation of the static arm depends on sending the
signals from DAQ to every motor's control line. The static
arm connected to DAQ by connecting every control line to a
digital output pin in DAQ. Table 2 shows these connections.
IV. LABVIEW SOFTWARE
Figure 9. Main Control Panel
LabVIEW, (Laboratory Virtual Instrumentation
Engineering Workbench) developed by National Instruments, 1. Direct Control mode enables the user to control the
is a graphical programming environment suited for high level static arm and a graphical simulator arm using the
or system level design. It allows integrating different signal portable arm. The flow chart and LabVIEW of the
processing components or subsystems within a graphical direct control panel is presented in Figure (10) and
framework. This software package is one of the first Figure (11).
graphical programming products, and is currently used in Start
academia and industries for data acquisition, remote control,
simulation, and analysis [12]. LabVIEW uses dataflow Read voltage
from DAQ
programming, where the flow of data determines execution.
LabVIEW incorporates a graphical user interface (GUI) Convert
programming environment to produce programs that mimic
voltage to
angle
laboratory instruments. These programs are called Virtual
Instruments (VI).Each VI contains three main parts as shown Convert angle Yes
in Figure (8): Graphical Arm to suitable
PWM
If Record ?
ŌĆó Front Panel. How the user interacts with the VI. NO
If Return ?
Yes
Record
ŌĆó Block Diagram. The code that controls the Out to DAQ
program. END
ŌĆó Icon/Connector. Means of connecting a VI to other Static Arm
VIs.
Figure 10. Flow Chart of Direct Control Panel
Figure 8. LabVIEW VI
Figure (9) shows the main control panel of the system. The Figure 11. Direct Control Panel
robotic arm system is composed of three parts:
1. Direct motion control A block diagram of data collected from the portable arm
2. Manual motion control for the direct control mode build using LabVIEW is shown in
3. Preview & repeat mode Figure (12).
12](https://image.slidesharecdn.com/bachelor-130130073122-phpapp01/85/A-Mimicking-Human-Arm-with-5-DOF-Controlled-by-LabVIEW-4-320.jpg)
![IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011
ISSN: 1793-8236
robotic arm. Software has been designed in such a way to Dr. Basil Hamed is Assistant Professor of Electrical Engineering
Department, Islamic University of Gaza, Palestine, since 1999. He has
make it more user-friendly and understandable. It has been Bachelor Degree in Electrical Engineering from New Mexico State
tested in many areas and competitions. Its performance was University, NM. USA in the year of 1989, he received Master degree from
observed to be excellent. Just as it was an educating University of New Orleans, La. USA in the year of 1992, and earned his PhD
experience conducting this project, its outcome, can be used (Fuzzy Control System) from New Mexico State University, NM USA in the
year 1999. He has 15 years of teaching experience and has published many
as an educational tool for introducing the LabVIEW based papers in national and international journals. His fields of interest include
data acquisition card real-time applications. Control Systems, Fuzzy Control, Simulation & Modeling, FPGA, Signal and
Image Processing
REFERENCES
[1] Norman S. Nise.ŌĆØControl Systems EngineeringŌĆØ, 4th edition. 2004,
John Wily & Sons, Inc
[2] The Canandarm: Remote Manipulator System (RMS),
Available:http://ffden-2.phys.uaf.edu/211.web.stuff/Adamczak/rms.ht
m
[3] G. Hirzinger, N. Sporer, M. Schedl, J. Butterfass, M. Grebenstein,
ŌĆ£Robotics and Mechatronics in aerospace,ŌĆØ The 7th International
Workshop on Advanced Motion Control, 2002, pp. 19-27.
[4] Y. Woo-Keun, T. Goshozono, H. Kawabe, M. Kinami, Y. Tsumaki, M.
Uchiyama, M. Oda, and T. Doi, ŌĆ£Model-based space robot
teleoperation of ets-vii manipulator,ŌĆØ IEEE Trans. on Robotics and
Automation, vol. 20, no. 3, pp. 602ŌĆō612, 2004.
[5] T. Tayh-Jong, A. Bejczy, G. Chuanfan, and X. Ning, ŌĆ£Intelligent
planning and control for telerobotic operations,ŌĆØ Proc. of IEEE/RSJ Int.
Conf. Intelligent Robots and Systems, pp. 389ŌĆō396, 1994.
[6] J. Park and O. Khatib, ŌĆ£A haptic teleoperation approach based on
contact force control,ŌĆØ International Journal of Robotics Research, vol.
25, no. 5-6, pp. 575ŌĆō591, 2006.
[7] T. Asfour and R. Dillmann, ŌĆ£Human-like motion of a HumanoidRobot
Arm Based on a Closed-Form Solution of the InverseKinematics
ProblemŌĆØ, Industrial Application of Informatics andMicrosystems
(IAIM), Computer science Department, University ofKarlsruhe,
Germany.
[8] John. J. Craig, ŌĆ£Introduction to RoboticsŌĆØ, Mechanics and Control,2nd
Edition, Addison-Wesley, 1989.
[9] National Instruments, DAQ 6023E/ 6024E/ 6025E, user manual:
January 1999 Edition.
[10] D. F. Styer, The strange world of quantum mechanics ~cambridge U.P.,
New York, 2000.
[11] http://www.omega.com/prodinfo/data acquisition.html
[12] Korrapati R.; Anderson, J.A; Swain, N.K; Swain M; ŌĆ£System Modeling
Using Virtual InstrumentsŌĆØ Southeast Con, 2002.Proceedings IEEE
Digital Object Identifier:10.1109/ .2002.995570Publication Year:
2002, Page(s): 121 ŌĆō 126
14](https://image.slidesharecdn.com/bachelor-130130073122-phpapp01/85/A-Mimicking-Human-Arm-with-5-DOF-Controlled-by-LabVIEW-6-320.jpg)
A Mimicking Human Arm with 5 DOF Controlled by LabVIEW
- 1. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 A Mimicking Human Arm with 5 DOF Controlled by LabVIEW Basil Hamed discomfort for non-experts. Moreover, in most of the cases AbstractŌĆöIn this paper, a proposed design of 5 DOF arm the user should be trained to map his/her action (i.e. three robot is presented; each of the armŌĆÖs joints will be generated dimensions motion of a joystick) to the resulted motion of the by the corresponding human armŌĆÖs joints . The paper will robot. In this paper, a new mean of interface is proposed, present a full design of a robot arm that mimics the human arm motion. Also, a graphical simulator will be designed to mimic according to which, the user can directly control 5 DOF a the human arm simultaneously with the mechanical robot arm. robot arm, by performing natural motions with his/her own Both of the arms are controlled using LabVIEW and data arm, using LabVIEW software and data acquisition card. acquisition card NI-PCI 6024E. For control applications, The robot-arm has 5 degrees of freedom (DOF). The LabVIEW Real-Time provide a single software development shoulder is bowing and rotating, the elbow and the wrist are tool that can implement the functions to PC-based control only bowing and the hand itself is rotating systems, thus acting as a programmable automation controller. The first and foremost factor in designing the robotic arm is the decision making of the number of DOF. This decision Index TermsŌĆöControl, Human-Machine Interface, LabVIEW, Data Acquisition, 5DOF, and Human Motion is mainly dependent on the task which the manipulator has to perform and the workspace it has to cover. In simple pick and place operations the suitable DOFs can make a system robust I. INTRODUCTION but complicated as well. The larger the DOF the more efficient and dexterous the manipulator is. But on the other Among social infrastructure technologies, Robot hand, system complication in design and control also technology is expected to play an important role in solving increases [7]. In this paper 5 DOF arm robot has been the world problems. One of the most important fields in the designed. development of successful robotics systems is the Human-Machine Interaction. A control system is a collection Design Criteria The arm robot system must achieve the following design of components working together under the direction of some criterions: machine intelligence [1]. Nowadays, many kinds of The arm robot system should have compatible shape to be mechanical arms are used in various applications such as in suitable for human usage. semiconductor fabrications, automobile manufacturing, Stability of the arm robot system is the main factor that various industries, medical operations, transportations, reflects the quality of the design. educations, or even in space missions [2][3]. Robots are most useful in executing the same defined job repeatedly and in II. SYSTEM OVERVIEW precisely the same fashion. When working on tasks that are continuously duplicated, these automated machines are able To achieve the design criteria, the system consists of three to overcome certain types of errors better than humans. In parts. Figure (1) shows the main parts of the system and the most cases, electronic circuits provide the intelligence, and flow of data from input to output passing through the electromechanical components such as sensors and motors controller. provide the interface to the physical world and by this work it introduces intelligence to the system by computer providing via LabVIEW software with Data Acquisition Card utility. Robot arms are versatile tools found in a wide range of applications. In recent years, applications where humans and robot arms interact, have received increased attention. The case where the interaction entails the human controlling a remote robot is called robot teleoperation. The latter case requires a user interface to translate the operator commands to the robot. A large number of interfaces have been proposed on this issue in previous works, where some examples of them can be found in [4], [5], and [6]. However, most of them involve complex mechanisms or systems of sensors, that the user should be acquaint with, resulting to a feeling of Figure 1. System block diagram The following subsections explain the arm robot system 9
- 2. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 parts in details: The static robot arm consist generally three components, which can perform its task: A. Portable arm Each of the human armŌĆÖs joints will be the signal generator ŌĆó Mechanical arm: As shown in Figure (4), the for the corresponding joint of the robotic armŌĆÖs joints. The mechanical design of the robot consists of five portable arm shown in Figure (2) is the part responsible for parts: the base, shoulder, elbow, wrist and gripper. sensing the human arm movements, converting these Plastic is used as the essential material to build the static arm. mechanical signals into electrical signals and then passing them to the controller for processing. ŌĆó Motors: are used to move the arm to its correct The portable arm consists of four segments with five joints position. In this paper ŌĆ£Servo motorŌĆØ is used as shown in Figure (5). that represent (shoulder, arm, elbow, wrist and gripper) the real human arm. Each of these joints has ŌĆó Controller: that processes the input and makes the mechanical-to-electrical signal transducers. The transducer robot perform its task. LabVIEW, and Data Acquisition Card used as a controller. should be chosen to be capable to convert mechanical motion to electrical signal and it is preferable to be rotational according to human's arm joints. Figure 2. Portable arm The material used to build the portable arm is aluminum Figure 4. Static Arm which is preferable to plastic or other materials because itŌĆÖs light weight, ease to fabricate, hard to broke and acceptable appearance. The potentiometer as shown in Figure (3) is accepted to be the transducer at each joint of the portable arm. Potentiometers are placed on each joint of the arm to measure the rotation. As the joint rotates, the resistance of each sensor varies. This resistance change in turn gives us analog voltages which are fed in to the ADC. Limit switches are Figure 5. RC Servo Motor placed at all joints to get the extreme positions of the links within the workspace. Limit switches act as over-riding Servo motor controls for the links. The potentiometer is chosen over other Servo motors (as shown in Figure (5)) were selected as transducer especially optical encoder because it can tell the actuators to meet the force/ torque requirements, due to their initial position of the joint at the starting point, it has better fast response and less maintenance problems [8]. Five servo resolution than optical encoder, and it has analog input. motors have been used to drive each of the five joints. Stepper motor or other DC motors can be used to control the arm except that; the DC motor does not have a feedback as servo motor does. Advantages of servo motor over other motors: 1. The stepper motor is controlled by 4-5 digital bits but the servo used one bit for controlling. As known the DAQ have 8 I/O digital bit and then can control two stepper motor only but can control 8 servos motor. 2. Most of stepper motors does not have a feedback line. 3. The voltage feedback servo motor is commonly Figure 3. Potentiometer as a transducer used for position control than encoder (pulse) B. Static arm feedback one. 10
- 3. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 4. The cost of the servo is feasible and appropriate. III. COMPUTER INTERFACING Each motor can move from 0 to 180 degree and can be Data acquisition system involves gathering signals from modified to move from 0 to 360 degree as shown in Figure measurement sources and digitizing the signal for storage, (18), but most joint in human arm doesnŌĆÖt need 360 degree analysis and presentation on computer. The National rotation. The motors of a robot arm can be best controlled by Instruments (NI) offers different versions for data acquisition PWM signals, because the associated power amplifiers will cards: 6023E, 6024E, 6025E. In this paper 6024E shown in then be able to operate in the pulsed mode which results in Figure (7), has been chosen which features 16 channels of minimal power losses. analog input, two channels of analog output, a 68-pin The advantage of PWM system to produce high voltage connector and eight lines of digital I/O . This board uses and current peaks has been fully utilized to produce larger National Instruments DAQ-STC system timing controller for torques while remaining inside the maximum continuous time-related functions. DAQ-STC consists of three timing ratings of the motor. The current surge and voltage spike at groups that control analog input, analog output, and startup has been catered for by the PWM control. general-purpose counter/timer functions. These groups C. Software Control include a total of seven 24-bit and three 16-bit counters and a The software will be divided into: maximum timing resolution of 50 ns [9]. DAQ-STC makes 1. Direct Control Mode: possible such applications as buffered pulse generation, In this mode the user carries a portable arm which sends equivalent time sampling, and seamless changing of the the information that represents the rotated angles for each sampling rate. Three main components to be considered in joint to the computer through the data acquisition card the systems are [10]: (DAQ). 1) Signals: The signals are standard logic pulses coming The LabVIEW software program works as a processor that from the detectors. can handle the inputs and interfacing with outputs. As said 2) DAQ hardware: DAQ hardware acts as the interface before the input is represented by the human portable arm and between the computer and the outside world. the output will be the static robot arm that simulates the 3) Driver and software motion of the human arm. In addition, a graphical arm simulation developed beside the static arm. The program can record a motion with unlimited time by values it captured from the input. 2. Manual Control Mode: In this mode changes has been made on the direct mode that increases the available options of the program and added a new facility of control. The option is focused on controlling the static arm by the program itself, and the inputs in this case will be a numeric angle inputs. As mentioned above the program can record a motion with unlimited time but here the numeric values will play as inputs. Figure 7. DAQ 6024E and the pin connector 3. Preview & Repeat Mode: Data acquisition begins with the physical phenomenon to This mode is for browsing a saved motion and can preview be measured. This physical phenomenon could be the the motion or repeats this motion for a specific time. The temperature of a room, the intensity of a light source, the motion can be break at any time. pressure inside a chamber, the force applied to an object, or The block diagram of the robot arm with the controller is many other things. An effective DAQ system can measure all shown in Figure (6). phenomena. The ability of DAQ system to measure different phenomena depends on the transducer to convert the physical phenomena into signals measurable by the DAQ hardware. Transducers are synonymous with sensors in DAQ systems [11]. Joint Channel Channel pin number Shoulder ACH0 68 Arm ACH1 33 Elbow ACH2 65 Wrist ACH3 30 Gripper ACH4 28 TABLE 1’╝Ä PORTABLE ARM & DAQ CONNECTION Joint Channel Channel pin number Shoulder DCH0 52 Figure 6. Robot Arm & Controller Block Diagram Arm DCH1 17 Elbow DCH2 49 11
- 4. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 Wrist DCH3 47 Gripper DCH4 19 TABLE 2’╝Ä STATIC ARM ŌĆō DAQ INTERFACING All these features served the arm robotic system to perform its task. The portable arm has five joints so it will have five signals and these signals need five analog input channels of DAQ. Table 1 shows the name of the joint and its corresponding input channel in DAQ as connected. The operation of the static arm depends on sending the signals from DAQ to every motor's control line. The static arm connected to DAQ by connecting every control line to a digital output pin in DAQ. Table 2 shows these connections. IV. LABVIEW SOFTWARE Figure 9. Main Control Panel LabVIEW, (Laboratory Virtual Instrumentation Engineering Workbench) developed by National Instruments, 1. Direct Control mode enables the user to control the is a graphical programming environment suited for high level static arm and a graphical simulator arm using the or system level design. It allows integrating different signal portable arm. The flow chart and LabVIEW of the processing components or subsystems within a graphical direct control panel is presented in Figure (10) and framework. This software package is one of the first Figure (11). graphical programming products, and is currently used in Start academia and industries for data acquisition, remote control, simulation, and analysis [12]. LabVIEW uses dataflow Read voltage from DAQ programming, where the flow of data determines execution. LabVIEW incorporates a graphical user interface (GUI) Convert programming environment to produce programs that mimic voltage to angle laboratory instruments. These programs are called Virtual Instruments (VI).Each VI contains three main parts as shown Convert angle Yes in Figure (8): Graphical Arm to suitable PWM If Record ? ŌĆó Front Panel. How the user interacts with the VI. NO If Return ? Yes Record ŌĆó Block Diagram. The code that controls the Out to DAQ program. END ŌĆó Icon/Connector. Means of connecting a VI to other Static Arm VIs. Figure 10. Flow Chart of Direct Control Panel Figure 8. LabVIEW VI Figure (9) shows the main control panel of the system. The Figure 11. Direct Control Panel robotic arm system is composed of three parts: 1. Direct motion control A block diagram of data collected from the portable arm 2. Manual motion control for the direct control mode build using LabVIEW is shown in 3. Preview & repeat mode Figure (12). 12
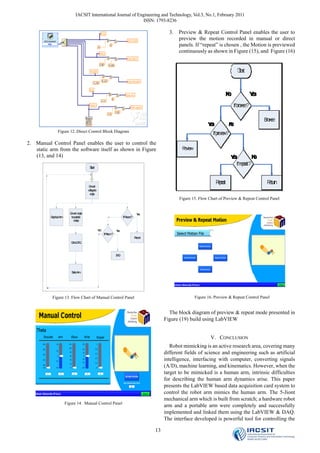
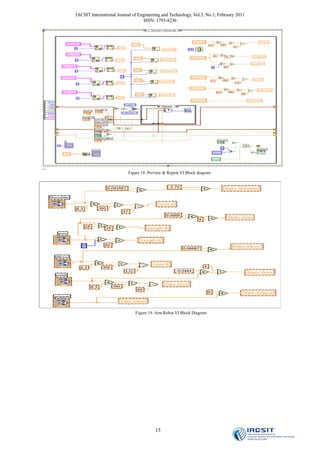
- 5. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 3. Preview & Repeat Control Panel enables the user to preview the motion recorded in manual or direct panels. If ŌĆ£repeatŌĆØ is chosen , the Motion is previewed continuously as shown in Figure (15), and Figure (16) Figure 12. Direct Control Block Diagram 2. Manual Control Panel enables the user to control the static arm from the software itself as shown in Figure (13, and 14) S rt ta Cn e o v rt v lta eto og ag n le Figure 15. Flow Chart of Preview & Repeat Control Panel Cn e a g o v rt n le Ys e G p ic l A ra h a rm tos ita le ub If Rc rd? eo PM W NO Ys e If Rtu ? e rn Rc rd eo Ot toD Q u A ED N S ticA ta rm Figure 13. Flow Chart of Manual Control Panel Figure 16. Preview & Repeat Control Panel The block diagram of preview & repeat mode presented in Figure (19) build using LabVIEW V. CONCLUSION Robot mimicking is an active research area, covering many different fields of science and engineering such as artificial intelligence, interfacing with computer, converting signals (A/D), machine learning, and kinematics. However, when the target to be mimicked is a human arm, intrinsic difficulties for describing the human arm dynamics arise. This paper presents the LabVIEW based data acquisition card system to control the robot arm mimics the human arm. The 5-Jiont mechanical arm which is built from scratch; a hardware robot Figure 14. Manual Control Panel arm and a portable arm were completely and successfully implemented and linked them using the LabVIEW & DAQ. The interface developed is powerful tool for controlling the 13
- 6. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 robotic arm. Software has been designed in such a way to Dr. Basil Hamed is Assistant Professor of Electrical Engineering Department, Islamic University of Gaza, Palestine, since 1999. He has make it more user-friendly and understandable. It has been Bachelor Degree in Electrical Engineering from New Mexico State tested in many areas and competitions. Its performance was University, NM. USA in the year of 1989, he received Master degree from observed to be excellent. Just as it was an educating University of New Orleans, La. USA in the year of 1992, and earned his PhD experience conducting this project, its outcome, can be used (Fuzzy Control System) from New Mexico State University, NM USA in the year 1999. He has 15 years of teaching experience and has published many as an educational tool for introducing the LabVIEW based papers in national and international journals. His fields of interest include data acquisition card real-time applications. Control Systems, Fuzzy Control, Simulation & Modeling, FPGA, Signal and Image Processing REFERENCES [1] Norman S. Nise.ŌĆØControl Systems EngineeringŌĆØ, 4th edition. 2004, John Wily & Sons, Inc [2] The Canandarm: Remote Manipulator System (RMS), Available:http://ffden-2.phys.uaf.edu/211.web.stuff/Adamczak/rms.ht m [3] G. Hirzinger, N. Sporer, M. Schedl, J. Butterfass, M. Grebenstein, ŌĆ£Robotics and Mechatronics in aerospace,ŌĆØ The 7th International Workshop on Advanced Motion Control, 2002, pp. 19-27. [4] Y. Woo-Keun, T. Goshozono, H. Kawabe, M. Kinami, Y. Tsumaki, M. Uchiyama, M. Oda, and T. Doi, ŌĆ£Model-based space robot teleoperation of ets-vii manipulator,ŌĆØ IEEE Trans. on Robotics and Automation, vol. 20, no. 3, pp. 602ŌĆō612, 2004. [5] T. Tayh-Jong, A. Bejczy, G. Chuanfan, and X. Ning, ŌĆ£Intelligent planning and control for telerobotic operations,ŌĆØ Proc. of IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 389ŌĆō396, 1994. [6] J. Park and O. Khatib, ŌĆ£A haptic teleoperation approach based on contact force control,ŌĆØ International Journal of Robotics Research, vol. 25, no. 5-6, pp. 575ŌĆō591, 2006. [7] T. Asfour and R. Dillmann, ŌĆ£Human-like motion of a HumanoidRobot Arm Based on a Closed-Form Solution of the InverseKinematics ProblemŌĆØ, Industrial Application of Informatics andMicrosystems (IAIM), Computer science Department, University ofKarlsruhe, Germany. [8] John. J. Craig, ŌĆ£Introduction to RoboticsŌĆØ, Mechanics and Control,2nd Edition, Addison-Wesley, 1989. [9] National Instruments, DAQ 6023E/ 6024E/ 6025E, user manual: January 1999 Edition. [10] D. F. Styer, The strange world of quantum mechanics ~cambridge U.P., New York, 2000. [11] http://www.omega.com/prodinfo/data acquisition.html [12] Korrapati R.; Anderson, J.A; Swain, N.K; Swain M; ŌĆ£System Modeling Using Virtual InstrumentsŌĆØ Southeast Con, 2002.Proceedings IEEE Digital Object Identifier:10.1109/ .2002.995570Publication Year: 2002, Page(s): 121 ŌĆō 126 14
- 7. IACSIT International Journal of Engineering and Technology, Vol.3, No.1, February 2011 ISSN: 1793-8236 Figure 18. Preview & Repeat VI Block diagram Figure 19. Arm Robot VI Block Diagram 15