A visual compass for robot soccer
Download as pptx, pdf1 like301 views
This document summarizes a final year project on developing a visual compass for global localization of a robot soccer player. The student developed a prototype desktop application using OpenCV and SURF/SIFT algorithms to build a panoramic visual map from images and determine the robot's direction by matching query images to the map. Experimental results found errors of 18% for SURF and 29% for SIFT. Future work involves porting the application to the Nao robot and reducing errors by creating visual maps from multiple positions on the pitch.
1 of 18
Download to read offline



Ad
Recommended
Framework for hand gesture controlled video game
Framework for hand gesture controlled video gameVanjikumaran Sivajothy
╠²
This document presents a framework for controlling video games using hand gestures. It discusses researching hand gesture recognition including hand anatomy and feature extraction techniques like edge detection. An algorithm is proposed for gesture recognition. The framework was tested under different light conditions and gesture detection rates were analyzed. Limitations are noted along with possibilities for future work, with the goal of creating an affordable gesture-based natural user interface solution.Autonomous Navigation Robot
Autonomous Navigation Robot WAI HONG KEET
╠²
The document describes an autonomous navigation robot project. The aim of the project is to design a robot that can navigate autonomously within an indoor environment using different navigation methods. The robot needs to be able to navigate a specific room, recognize verbal commands, and avoid obstacles. Two navigation methods are discussed: an infrared line following method using a line tracking array, and a video processing method using edge detection in images to detect corridors and navigate. The conclusion discusses implementing the navigation methods, building a prototype robot, and testing and demonstrating it."The Roomba 980: Computer Vision Meets Consumer Robotics," a Presentation fro...
"The Roomba 980: Computer Vision Meets Consumer Robotics," a Presentation fro...Edge AI and Vision Alliance
╠²
The document discusses the Roomba 980's navigation technology which integrates various sensors including cameras for efficient localization, object recognition, and obstacle avoidance. It highlights challenges such as cost-effectiveness, efficient implementation, and the need for systematic navigation systems. The future focus includes addressing long-term mapping appearance changes and semantic scene understanding.Map reduce
Map reduceSyed Zaid Irshad
╠²
This document describes how to use MapReduce to process video from CCTV cameras to identify faces and their locations. The process involves:
1. The mappers take chunks of video as input, detect faces, extract features, and output face data with identifiers.
2. A shuffler redistributes the face data to reducers based on the identifiers.
3. The reducers calculate distances between the extracted features and a database of known faces. Faces that match are output along with their locations from the video frames. This allows identifying 20 people across 470,000 cameras in Beijing.Soccer Robot
Soccer RobotTim Michael
╠²
Scientists have designed a humanoid soccer playing robot named NimbRo-OP that is 95 cm tall and weighs 6.6 kg, similar to a small child. It has 20 actuators that allow it to kick a soccer ball and get up like a human. The robot is also capable of using tools, climbing stairs, and passing through narrow spaces, and its open source code and design allow others to modify and improve upon it.Soccer robot TURTLE-5k - Corporate Social Responsibility throughout collabora...
Soccer robot TURTLE-5k - Corporate Social Responsibility throughout collabora...Frank Steeghs
╠²
ACE Ingenieurs- & Adviesbureau, established in 1977, focuses on developing low-cost soccer robots to promote technology and facilitate entry into RoboCup leagues as a part of its corporate social responsibility initiatives. The project aims to redesign an existing robot to reduce costs significantly while maintaining functionality, and to foster collaboration with partners and technical universities. Results included a prototype showcased at RoboCup Brazil 2014, demonstrating the potential for future innovations in autonomous robotics.Soccer robot TURTLE-5k - How and why we developed a soccer robot for everybod...
Soccer robot TURTLE-5k - How and why we developed a soccer robot for everybod...Frank Steeghs
╠²
The Turtle-5k project aims to develop an affordable soccer robot, reducing costs from Ōé¼25,000 to Ōé¼5,000 through innovative hardware and software design. Key advancements include the use of open-source technologies, industrial-grade components, and simplified manufacturing processes. The project emphasizes collaboration within the robotic community to exchange designs and enhance robotics accessibility.Robot soccer
Robot soccerTarek Muallim
╠²
This document discusses different types and sizes of rescue robots including kid-sized, teen-sized, and adult-sized rescue robots. It also lists several robot brands and models like HuroSot, AndroSot, Robosot, MiroSot, and SimuroSot that come in kid and adult sizes for rescue simulations.Mobile Robot: Applications and Design
Mobile Robot: Applications and Design Deep Patel
╠²
The document outlines various applications and designs of mobile robots, including their use in search and rescue, exploration, manufacturing, agriculture, and education. It presents the engineering design process for creating robots, highlighting steps from defining a problem to testing prototypes. Acknowledgments are given to various teams and institutions involved in robotics research and development.01 cie552 introduction
01 cie552 introductionElsayed Hemayed
╠²
This document provides an introduction to computer vision. It defines computer vision as using image processing and computer algorithms to interpret images and videos. The goal of computer vision is to bridge the gap between pixels in an image and the meaningful objects and scenes that humans perceive. Computer vision systems aim to interpret images at low, mid, and high semantic levels, from basic measurements and features to activities and deep understandings. The document outlines challenges in computer vision like viewpoint and illumination variations, occlusions, scales, deformations, and clutter. It also discusses how human vision differs from computer interpretations.MRL Team Description Paper for Humanoid KidSize League Of 2015
MRL Team Description Paper for Humanoid KidSize League Of 2015Emad Farrokhi
╠²
The document is a team description paper for the MRL humanoid robot team participating in the RoboCup 2015 humanoid kidsize soccer league competition. It describes the team's modified DARwIn-OP and new Rabo humanoid robots, including their physical specifications and customized operating system. It also summarizes the team's developments in areas like motion control using an evolutionary algorithm, robot vision using color segmentation and line/goal detection, self-localization using a combined MCL/UKF method, cooperative occupancy grid mapping, and ball tracking using Kalman filtering.Philipp Nagele (Wikitude): What's Next with Wikitude
Philipp Nagele (Wikitude): What's Next with WikitudeAugmentedWorldExpo
╠²
Wikitude is a leading augmented reality (AR) platform, established in 2008, that has evolved through various innovations and partnerships, achieving 25 million downloads globally. Recent updates to the Wikitude SDK have introduced improved performance, new tracking technologies, and enhanced tools for AR app development across various devices and platforms. The document also outlines specific features for creating AR experiences similar to Pok├®mon Go, highlighting how to define location-based interactions and 3D model animations.Portfolio - Ramsundar K G
Portfolio - Ramsundar K GRamsundar K G
╠²
Ramsundar Kalpagam Ganesan is a graduate student in Computer Engineering at ASU, with research interests in Computer Vision. He is currently working as a graduate researcher at the Interactive Robotics Lab, advised by Prof. Heni Ben Amor. His master's thesis involves developing an augmented projection system that can track objects and project information onto them using Computer Vision techniques. He has experience with various Computer Vision and machine learning projects involving facial expression recognition, obstacle detection, spike sorting, and more.RMV robot programming
RMV robot programminganand hd
╠²
The document discusses various methods of robot programming in robotics and machine vision systems, emphasizing leadthrough methods and textual programming languages. Leadthrough programming involves moving the robot through desired paths for memory recording, while textual programming resembles computer coding, allowing for more complex operations. It also explores additional programming methods, including limited sequence robots and the importance of defining points in space to ensure accuracy and avoid obstacles during operations.Nirav joshi mechanical engineer - portfolio
Nirav joshi mechanical engineer - portfolioNirav Joshi
╠²
This document is a mechanical engineering portfolio for Nirav Joshi. It summarizes his educational and professional experience in mechanical design and robotics. Over the past 1.5 years, he has worked as a Mechatronics Engineer designing robot components in Solidworks, coordinating vendors, and testing robots. He also has experience developing algorithms for autonomous robots using MATLAB from participating in national robotics competitions. His portfolio provides details on several robot design projects and competitions he has contributed to.Mapping mobile robotics
Mapping mobile roboticsDevasena Inupakutika
╠²
This document describes a project that uses SLAM (Simultaneous Localization and Mapping) to create maps of an unknown environment using a Turtlebot mobile robot equipped with a Kinect sensor. The GMapping ROS package is used to implement SLAM and build occupancy grid maps while simultaneously localizing the robot. Issues arose from using the Kinect's RGB sensor instead of a laser scanner for mapping. The resulting maps showed the robot's trajectory and obstacles but were less precise than if a laser scanner was used. Autonomous navigation on the created maps demonstrated the basic SLAM approach.RobotStudiopp.ppt
RobotStudiopp.pptNhaTruongThanh
╠²
RobotStudio is an offline robot programming software that allows users to graphically design robot worlds, define robot paths, generate RAPID code, and simulate programs. Key steps include designing the robot and workspace components in the software's libraries, assembling them to match the real setup, specifying the robot's motion paths between targets, generating and verifying the program in a virtual simulation, and then transferring it to the physical robot controller. Offline programming offers advantages like reduced risk, uninterrupted production, optimization of cycle times, and higher part quality.ie450RobotStudio.ppt
ie450RobotStudio.pptNhaTruongThanh
╠²
RobotStudio is an offline robot programming software that allows defining robot motions and worlds without using the physical teach pendant. It has libraries of robots, tools and other objects that can be assembled to model the robot workspace. Paths are then defined by specifying target points for the robot to reach. The program can be simulated, verified and optimized in RobotStudio before generating RAPID code and transferring to the real robot controller. Offline programming offers advantages like reduced risk, uninterrupted production, and optimized paths for higher productivity and quality. SIMULTANEOUS MAPPING AND NAVIGATION FOR RENDEZVOUS IN SPACE APPLICATIONS
SIMULTANEOUS MAPPING AND NAVIGATION FOR RENDEZVOUS IN SPACE APPLICATIONS Nandakishor Jahagirdar
╠²
The document outlines a project aimed at developing an autonomous navigation system for robots that use image-based tracking to follow paths and avoid collisions, with a focus on space applications. The system employs a robot equipped with a camera and infrared sensors, processing images via MATLAB to navigate effectively. Future work aims to enhance performance using OpenCV for image processing and testing additional sensors.Why MOVO? Insights into the new beta community.
Why MOVO? Insights into the new beta community.Marie-Pier Faucher
╠²
The Movo beta program aims to foster a research community focused on advancing mobile manipulation technologies for robotics, emphasizing human-robot interaction and collaboration. By participating, members will influence Movo's development while having access to unique capabilities, including advanced motion planning and a robust modular platform. The program features practical applications like assisted tele-operation and mapping, providing a foundation for research and innovation in mobile manipulators.Computer Vision (CV) based Raspberry Pi robot vehicle
Computer Vision (CV) based Raspberry Pi robot vehicleAhammed Shoyeb
╠²
The document outlines the development of a computer vision-based autonomous robot utilizing a Raspberry Pi 4, emphasizing its efficiency and cost-effectiveness. The robot employs a convolutional neural network for object classification and navigation, successfully identifying targets and obstacles while maintaining specific distances. The project has achieved its objectives, resulting in a functional robotic guidance system with documented performance and plans for future enhancements.Design of a Library of Motion Functions for a Humanoid Robot for a Soccer Game
Design of a Library of Motion Functions for a Humanoid Robot for a Soccer GameUniversidad Complutense de Madrid
╠²
This document describes a senior design project to develop a library of motion functions for a humanoid robot to play soccer. The project involves reviewing literature on biped walking motion, the robot hardware manual, and previous teams' specs. The design options considered are using different serial interface libraries. The implemented solution and testing results are discussed. The library allows the robot to walk forward and backward, turn, and kick a ball.ž©█ī┘垦█ī█ī ┘ģž¦ž┤█ī┘å
ž©█ī┘垦█ī█ī ┘ģž¦ž┤█ī┘åShiraz LUG
╠²
Computer vision is the study of analyzing images and videos to understand and interpret visual content. It involves developing techniques to achieve tasks like object detection and recognition. Computer vision has many applications including optical character recognition, face detection, 3D modeling, robotics, medical imaging, and self-driving cars. OpenCV is a popular open source library for computer vision that contains over 2500 optimized algorithms and supports languages like C++, Python, and Java.OpenCV
OpenCVMarie Behzadi
╠²
Computer vision is the study of analyzing images and videos to understand and interpret visual content. It involves developing techniques to achieve tasks like object detection and recognition. Computer vision has many applications including optical character recognition, face detection, 3D modeling, robotics, medical imaging, and self-driving cars. OpenCV is a popular open source library for computer vision that contains over 2500 optimized algorithms and supports languages like C++, Python, and Java.Mobile robotics fuzzylogic and pso
Mobile robotics fuzzylogic and psoDevasena Inupakutika
╠²
This document describes an assignment involving the development of controllers for mobile robots using artificial intelligence techniques.
The controllers were developed using fuzzy logic and particle swarm optimization (PSO) algorithms to enable optimal target reaching with obstacle avoidance. Fuzzy logic was used to navigate an unknown environment using a Turtlebot robot equipped with a Kinect sensor. PSO was used to simulate path planning coordination between multiple robots.
The document outlines the objectives, theory, methodology, and technical approaches used. It provides details on setting up the ROS navigation stack, developing a fuzzy inference system using Mamdani fuzzy logic, and the PSO algorithm flow. Results and discussions are also presented.[Project1] Information Virtual Reality [Exam]
[Project1] Information Virtual Reality [Exam]Yati Dumrongsukit
╠²
The document discusses the development of a virtual reality information display system using technologies like Oculus Rift, Leap Motion, and Unity3D. It outlines objectives, principles, and results of the system, highlighting the use of hand gestures and head tracking for interaction. The conclusion indicates successful connectivity of components but notes that some functionalities require further improvement.Computer Vision Crash Course
Computer Vision Crash CourseJia-Bin Huang
╠²
This document provides an overview of a computer vision crash course. It begins with an agenda for the course that includes introductions, fundamentals of computer vision, and recent advances. It then discusses some of the challenges of computer vision and provides examples of computer vision applications such as face detection, recognition, tracking, hand tracking, biometrics, optical character recognition, computer vision in sports, scene reconstruction, and more. It also provides a brief history of the field and discusses some of the fundamentals including light, matching, alignment, geometry, grouping, and recognition.A Review On AI Vision Robotic Arm Using Raspberry Pi
A Review On AI Vision Robotic Arm Using Raspberry PiAngela Shin
╠²
This document summarizes a research project that designed an artificial intelligence (AI) vision robotic arm using a Raspberry Pi microcontroller. The robotic arm has 6 degrees of freedom and is intended to perform multifunctional tasks like detecting, identifying, grasping, and repositioning objects. A computer vision system with a camera is used to recognize objects and their spatial positions to control the robotic arm's movement. The vision system is processed using the Raspberry Pi's computing power to recognize objects in real-time based on software commands. The study aims to interest and automate various axes of the manipulator to lift, carry and place objects as desired using integrated electric motors and a vision-based control system.The Power of religious Symbols: A scientific and spiritual analysis
The Power of religious Symbols: A scientific and spiritual analysisDr. Anshula Garg
╠²
All about the Power of religious Symbols: A scientific and spiritual analysisMore Related Content
Similar to A visual compass for robot soccer (20)
Mobile Robot: Applications and Design
Mobile Robot: Applications and Design Deep Patel
╠²
The document outlines various applications and designs of mobile robots, including their use in search and rescue, exploration, manufacturing, agriculture, and education. It presents the engineering design process for creating robots, highlighting steps from defining a problem to testing prototypes. Acknowledgments are given to various teams and institutions involved in robotics research and development.01 cie552 introduction
01 cie552 introductionElsayed Hemayed
╠²
This document provides an introduction to computer vision. It defines computer vision as using image processing and computer algorithms to interpret images and videos. The goal of computer vision is to bridge the gap between pixels in an image and the meaningful objects and scenes that humans perceive. Computer vision systems aim to interpret images at low, mid, and high semantic levels, from basic measurements and features to activities and deep understandings. The document outlines challenges in computer vision like viewpoint and illumination variations, occlusions, scales, deformations, and clutter. It also discusses how human vision differs from computer interpretations.MRL Team Description Paper for Humanoid KidSize League Of 2015
MRL Team Description Paper for Humanoid KidSize League Of 2015Emad Farrokhi
╠²
The document is a team description paper for the MRL humanoid robot team participating in the RoboCup 2015 humanoid kidsize soccer league competition. It describes the team's modified DARwIn-OP and new Rabo humanoid robots, including their physical specifications and customized operating system. It also summarizes the team's developments in areas like motion control using an evolutionary algorithm, robot vision using color segmentation and line/goal detection, self-localization using a combined MCL/UKF method, cooperative occupancy grid mapping, and ball tracking using Kalman filtering.Philipp Nagele (Wikitude): What's Next with Wikitude
Philipp Nagele (Wikitude): What's Next with WikitudeAugmentedWorldExpo
╠²
Wikitude is a leading augmented reality (AR) platform, established in 2008, that has evolved through various innovations and partnerships, achieving 25 million downloads globally. Recent updates to the Wikitude SDK have introduced improved performance, new tracking technologies, and enhanced tools for AR app development across various devices and platforms. The document also outlines specific features for creating AR experiences similar to Pok├®mon Go, highlighting how to define location-based interactions and 3D model animations.Portfolio - Ramsundar K G
Portfolio - Ramsundar K GRamsundar K G
╠²
Ramsundar Kalpagam Ganesan is a graduate student in Computer Engineering at ASU, with research interests in Computer Vision. He is currently working as a graduate researcher at the Interactive Robotics Lab, advised by Prof. Heni Ben Amor. His master's thesis involves developing an augmented projection system that can track objects and project information onto them using Computer Vision techniques. He has experience with various Computer Vision and machine learning projects involving facial expression recognition, obstacle detection, spike sorting, and more.RMV robot programming
RMV robot programminganand hd
╠²
The document discusses various methods of robot programming in robotics and machine vision systems, emphasizing leadthrough methods and textual programming languages. Leadthrough programming involves moving the robot through desired paths for memory recording, while textual programming resembles computer coding, allowing for more complex operations. It also explores additional programming methods, including limited sequence robots and the importance of defining points in space to ensure accuracy and avoid obstacles during operations.Nirav joshi mechanical engineer - portfolio
Nirav joshi mechanical engineer - portfolioNirav Joshi
╠²
This document is a mechanical engineering portfolio for Nirav Joshi. It summarizes his educational and professional experience in mechanical design and robotics. Over the past 1.5 years, he has worked as a Mechatronics Engineer designing robot components in Solidworks, coordinating vendors, and testing robots. He also has experience developing algorithms for autonomous robots using MATLAB from participating in national robotics competitions. His portfolio provides details on several robot design projects and competitions he has contributed to.Mapping mobile robotics
Mapping mobile roboticsDevasena Inupakutika
╠²
This document describes a project that uses SLAM (Simultaneous Localization and Mapping) to create maps of an unknown environment using a Turtlebot mobile robot equipped with a Kinect sensor. The GMapping ROS package is used to implement SLAM and build occupancy grid maps while simultaneously localizing the robot. Issues arose from using the Kinect's RGB sensor instead of a laser scanner for mapping. The resulting maps showed the robot's trajectory and obstacles but were less precise than if a laser scanner was used. Autonomous navigation on the created maps demonstrated the basic SLAM approach.RobotStudiopp.ppt
RobotStudiopp.pptNhaTruongThanh
╠²
RobotStudio is an offline robot programming software that allows users to graphically design robot worlds, define robot paths, generate RAPID code, and simulate programs. Key steps include designing the robot and workspace components in the software's libraries, assembling them to match the real setup, specifying the robot's motion paths between targets, generating and verifying the program in a virtual simulation, and then transferring it to the physical robot controller. Offline programming offers advantages like reduced risk, uninterrupted production, optimization of cycle times, and higher part quality.ie450RobotStudio.ppt
ie450RobotStudio.pptNhaTruongThanh
╠²
RobotStudio is an offline robot programming software that allows defining robot motions and worlds without using the physical teach pendant. It has libraries of robots, tools and other objects that can be assembled to model the robot workspace. Paths are then defined by specifying target points for the robot to reach. The program can be simulated, verified and optimized in RobotStudio before generating RAPID code and transferring to the real robot controller. Offline programming offers advantages like reduced risk, uninterrupted production, and optimized paths for higher productivity and quality. SIMULTANEOUS MAPPING AND NAVIGATION FOR RENDEZVOUS IN SPACE APPLICATIONS
SIMULTANEOUS MAPPING AND NAVIGATION FOR RENDEZVOUS IN SPACE APPLICATIONS Nandakishor Jahagirdar
╠²
The document outlines a project aimed at developing an autonomous navigation system for robots that use image-based tracking to follow paths and avoid collisions, with a focus on space applications. The system employs a robot equipped with a camera and infrared sensors, processing images via MATLAB to navigate effectively. Future work aims to enhance performance using OpenCV for image processing and testing additional sensors.Why MOVO? Insights into the new beta community.
Why MOVO? Insights into the new beta community.Marie-Pier Faucher
╠²
The Movo beta program aims to foster a research community focused on advancing mobile manipulation technologies for robotics, emphasizing human-robot interaction and collaboration. By participating, members will influence Movo's development while having access to unique capabilities, including advanced motion planning and a robust modular platform. The program features practical applications like assisted tele-operation and mapping, providing a foundation for research and innovation in mobile manipulators.Computer Vision (CV) based Raspberry Pi robot vehicle
Computer Vision (CV) based Raspberry Pi robot vehicleAhammed Shoyeb
╠²
The document outlines the development of a computer vision-based autonomous robot utilizing a Raspberry Pi 4, emphasizing its efficiency and cost-effectiveness. The robot employs a convolutional neural network for object classification and navigation, successfully identifying targets and obstacles while maintaining specific distances. The project has achieved its objectives, resulting in a functional robotic guidance system with documented performance and plans for future enhancements.Design of a Library of Motion Functions for a Humanoid Robot for a Soccer Game
Design of a Library of Motion Functions for a Humanoid Robot for a Soccer GameUniversidad Complutense de Madrid
╠²
This document describes a senior design project to develop a library of motion functions for a humanoid robot to play soccer. The project involves reviewing literature on biped walking motion, the robot hardware manual, and previous teams' specs. The design options considered are using different serial interface libraries. The implemented solution and testing results are discussed. The library allows the robot to walk forward and backward, turn, and kick a ball.ž©█ī┘垦█ī█ī ┘ģž¦ž┤█ī┘å
ž©█ī┘垦█ī█ī ┘ģž¦ž┤█ī┘åShiraz LUG
╠²
Computer vision is the study of analyzing images and videos to understand and interpret visual content. It involves developing techniques to achieve tasks like object detection and recognition. Computer vision has many applications including optical character recognition, face detection, 3D modeling, robotics, medical imaging, and self-driving cars. OpenCV is a popular open source library for computer vision that contains over 2500 optimized algorithms and supports languages like C++, Python, and Java.OpenCV
OpenCVMarie Behzadi
╠²
Computer vision is the study of analyzing images and videos to understand and interpret visual content. It involves developing techniques to achieve tasks like object detection and recognition. Computer vision has many applications including optical character recognition, face detection, 3D modeling, robotics, medical imaging, and self-driving cars. OpenCV is a popular open source library for computer vision that contains over 2500 optimized algorithms and supports languages like C++, Python, and Java.Mobile robotics fuzzylogic and pso
Mobile robotics fuzzylogic and psoDevasena Inupakutika
╠²
This document describes an assignment involving the development of controllers for mobile robots using artificial intelligence techniques.
The controllers were developed using fuzzy logic and particle swarm optimization (PSO) algorithms to enable optimal target reaching with obstacle avoidance. Fuzzy logic was used to navigate an unknown environment using a Turtlebot robot equipped with a Kinect sensor. PSO was used to simulate path planning coordination between multiple robots.
The document outlines the objectives, theory, methodology, and technical approaches used. It provides details on setting up the ROS navigation stack, developing a fuzzy inference system using Mamdani fuzzy logic, and the PSO algorithm flow. Results and discussions are also presented.[Project1] Information Virtual Reality [Exam]
[Project1] Information Virtual Reality [Exam]Yati Dumrongsukit
╠²
The document discusses the development of a virtual reality information display system using technologies like Oculus Rift, Leap Motion, and Unity3D. It outlines objectives, principles, and results of the system, highlighting the use of hand gestures and head tracking for interaction. The conclusion indicates successful connectivity of components but notes that some functionalities require further improvement.Computer Vision Crash Course
Computer Vision Crash CourseJia-Bin Huang
╠²
This document provides an overview of a computer vision crash course. It begins with an agenda for the course that includes introductions, fundamentals of computer vision, and recent advances. It then discusses some of the challenges of computer vision and provides examples of computer vision applications such as face detection, recognition, tracking, hand tracking, biometrics, optical character recognition, computer vision in sports, scene reconstruction, and more. It also provides a brief history of the field and discusses some of the fundamentals including light, matching, alignment, geometry, grouping, and recognition.A Review On AI Vision Robotic Arm Using Raspberry Pi
A Review On AI Vision Robotic Arm Using Raspberry PiAngela Shin
╠²
This document summarizes a research project that designed an artificial intelligence (AI) vision robotic arm using a Raspberry Pi microcontroller. The robotic arm has 6 degrees of freedom and is intended to perform multifunctional tasks like detecting, identifying, grasping, and repositioning objects. A computer vision system with a camera is used to recognize objects and their spatial positions to control the robotic arm's movement. The vision system is processed using the Raspberry Pi's computing power to recognize objects in real-time based on software commands. The study aims to interest and automate various axes of the manipulator to lift, carry and place objects as desired using integrated electric motors and a vision-based control system.Design of a Library of Motion Functions for a Humanoid Robot for a Soccer Game
Design of a Library of Motion Functions for a Humanoid Robot for a Soccer GameUniversidad Complutense de Madrid
╠²
Recently uploaded (20)
The Power of religious Symbols: A scientific and spiritual analysis
The Power of religious Symbols: A scientific and spiritual analysisDr. Anshula Garg
╠²
All about the Power of religious Symbols: A scientific and spiritual analysisPresenation - compensation plan - Mining Race - NEW - June 2025
Presenation - compensation plan - Mining Race - NEW - June 2025Mining RACE
╠²
ŌŁÉ’ĖÅ Bitcoin - Mining Race ŌŁÉ’ĖÅ The fastest-growing Bitcoin movement ŌŁÉ’ĖÅ english
Mining RACE - WEBINAR in 18 different languages - https://miningracewebinar.com/?id=N6TEA
ŌŁÉ’ĖÅ Referral link - https://miningrace.com/wallet/invite-activate/edA6xDgWMVLBAfCClWJy ŌŁÉ’ĖÅ
Invite code - edA6xDgWMVLBAfCClWJy
Mining Race - The fastest-growing Bitcoin movement
Participate in the ultimate Bitcoin community challenge. Climb to the top in the Mining Race.
Cryptocurrencies are all about the community. And what better way to support the BTC community than with a community-based mining program?
By participating in the Mining Race, you not only support the Bitcoin blockchain, but also receive additional rewards for being a member of the Mining Race community!
Ready for the Bitcoin Mining Race Challenge?
ŌŁÉ’ĖÅ Mining RACE - WEBINAR in 18 different languages - https://miningracewebinar.com/?id=N6TEASeminar Presented by Natnael Dechasa Title: Brain Cheat Codes: The Science-Ba...
Seminar Presented by Natnael Dechasa Title: Brain Cheat Codes: The Science-Ba...Nati1986
╠²
This engaging and well-structured presentation offers a psychologically grounded exploration of key personal development "codes" designed to inspire and equip young professionals and university students. Through clear, actionable insights and practical takeaways, the session empowers attendees to unlock their potential, build resilience, and achieve their goals. Ideal for workshops, seminars, or motivational events, the content is delivered in a visually appealing, easy-to-follow format that encourages reflection and growth.The Caribbean Challenge: Fostering Growth and Resilience Amidst Global Uncert...
The Caribbean Challenge: Fostering Growth and Resilience Amidst Global Uncert...Caribbean Development Bank
╠²
25th William G. Demas Memorial Lecture delivered by Dr. Nigel Clarke, Deputy Managing Director, International Monetary Fund on June 10, 2025 at the 55th Annual Meeting of the Caribbean Development Bank in Brasilia, Brazil.Types of Information Sources (Primary, Secondary, and Tertiary Sources)
Types of Information Sources (Primary, Secondary, and Tertiary Sources)jenicahmendoza1
╠²
Sources of information come in various forms and serve different educational purposes. AI Intelligence: Exploring the Future of Artificial Intelligence
AI Intelligence: Exploring the Future of Artificial Intelligencesayalikerimova20
╠²
AI Intelligence is a forward-thinking event designed to unite AI enthusiasts, developers, researchers, and industry professionals under one roof. The event explores the dynamic and rapidly evolving world of Artificial Intelligence ŌĆö from foundational theories to advanced, real-world applications.
Over the course of the event, participants engage in in-depth discussions, practical demonstrations, and expert-led talks covering a wide range of topics such as machine learning, natural language processing, generative AI, computer vision, and the ethics of AI deployment. The program aims not only to educate but also to inspire collaboration across disciplines and skill levels.
Whether you're just stepping into the world of AI or are already building solutions powered by it, AI Intelligence provides the perfect environment to discover cutting-edge tools, ask bold questions, and meet others who are shaping the future of technology.
This initiative is more than a tech event ŌĆö it's a community-driven journey into the mind of intelligent machines and the possibilities they unlock for society.
2025-06-15 Abraham 03 (shared slides).pptx
2025-06-15 Abraham 03 (shared slides).pptxDale Wells
╠²
Lesson 3 of 9 in a Heritage Bible Master Class study of Abraham, the man God called ŌĆØMy friendŌĆØ (Isa. 41:8)
The Heritage Bible Master Class is a non-denominational discussion-based adult Bible class. We meet every Sunday morning at 10:15 in the Administration Building at Heritage Palms Country Club, on the south side of Fred Waring, just east of Jefferson Street in Indio, CA. WeŌĆÖd love to have you drop by to check us out.Analysis of Tausog Language English.pptx
Analysis of Tausog Language English.pptxMervieJadeBabao
╠²
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language English
Analysis of Tausog Language EnglishFood Truck Business Plan | Sakthi Sundar.pptx
Food Truck Business Plan | Sakthi Sundar.pptxSakthi Sundar
╠²
"Food Truck Bus Plan ŌĆō A Mobile Culinary Venture"
This plan outlines the concept, strategy, and execution model for a mobile food truck business set up inside a modified bus. It covers market research, menu planning, location strategies, revenue models, and operational logistics. The goal is to deliver fresh, affordable, and on-the-go meals in high-traffic areas, events, and tech parks, combining mobility with modern street food culture. Perfect for aspiring entrepreneurs looking to enter the food business creatively.The Caribbean Challenge: Fostering Growth and Resilience Amidst Global Uncert...
The Caribbean Challenge: Fostering Growth and Resilience Amidst Global Uncert...Caribbean Development Bank
╠²
Ad
A visual compass for robot soccer
- 1. Final Year Project Final Presentation Student: Adil Mahmood Supervisor: Dr John McDonald
- 2. What is RoboCup ŌĆóRoboCup is an annual international robotics soccer competition founded in 1997. ŌĆóThe official goal of the RoboCup: robots that are capable of beating the FIFA World Cup winning team by 2050. ŌĆóRoboEireann, MaynoothŌĆÖs RoboCup team, have competed in the Standard Platform League (SPL) since 2008.
- 3. Overview of Background ’éŚ Mobile robot localisation can be separated into two separate problems, ’āś Local localisation (a.k.a. incremental localisation) ’āś the robot has an initial estimate of its pose ’āś Global localisation (a.k.a. kidnapped robot) ’āś robot doesnŌĆÖt have initial position information
- 4. Estimated line Real Pose Estimated Pose Real line Loop closure correction Local Localisation
- 5. Global Localisation Where IŌĆÖm? Which direction IŌĆÖm facing?
- 6. Research Questions ’éŚ Is visual compass effective to find the direction of robot is currently looking? ’éŚ What is the measurement of success?
- 7. Goals of Project ’éŚ Develop a visual compass for global localisation ’éŚ Images of visual appearance of fixed objects surrounding the pitch (or potential above the pitch) ’üČconstruct a panorama ’üČ using a sequence of images ’üČmatch query image to the panorama ’üČ detect features and matched features. ’üČCompute the direction of robot
- 8. Approach to Goals ’éŚ Build a visual map using OpenCV and SURF algorithms ’éŚ Visual map represent 360┬░ ’éŚ find the direction the robot is currently looking.
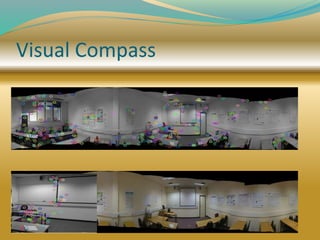
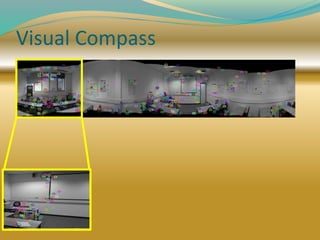
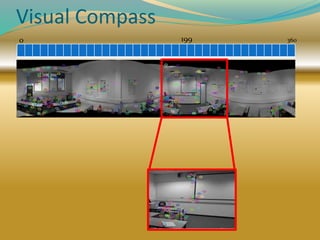
- 10. Visual Compass
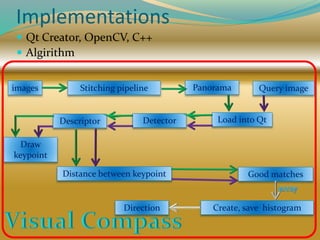
- 13. Implementations ’éŚ Qt Creator, OpenCV, C++ ’éŚ Algirithm images Stitching pipeline Panorama Query image Load into QtDetectorDescriptor Draw keypoint Distance between keypoint Good matches Create, save histogramDirection
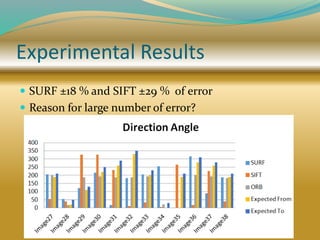
- 14. Experimental Results ’éŚ SURF ┬▒18 % and SIFT ┬▒29 % of error ’éŚ Reason for large number of error?
- 15. Experimental Results ’éŚ Weakness in technique image29 image30 image35
- 16. Conclusions & Future Work ’éŚ Developed prototype desktop visual compass application ’éŚ Evaluated on real image dataset ’éŚ Problems Encountered ’éŚ Ubuntu OS troubleshooting, QT toolkit, and OpenCV libraries ’éŚ Design the GUI application in QT ’éŚ Creating a histogram ’éŚ Future Work: Port to Nao robot.
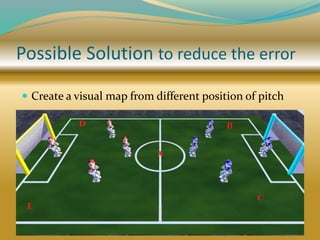
- 17. Possible Solution to reduce the error ’éŚ Create a visual map from different position of pitch
- 18. A Visual Compass for Robot Soccer
Editor's Notes
- #3: By the middle of the 21st century, a team of fully╠²autonomous humanoid robot soccer╠²players shall win a╠²soccer╠²game, complying with the official rules of FIFA, against the winner of the most recent╠²World Cup.
- #4: localisation problem tracks the pose of the robot over time, where the robot has an initial estimate of its pose, which it updates through the robots odometry and information it gathers for its sensors. The more challenging problem of global localisation occurs where a robot doesnŌĆÖt have initial position information, i.e., they can handle the kidnapped robot problem, in which a robot is kidnapped and carried to some unknown location.
- #7: YES: that it is possible to use a panoramic image representation as an visual map of the area surrounding of a pitch, by matching un-seen images to find the direction the robot is currently looking . A measurement of success is you can take random image from inside the lab for example, and know what direction are you looking for, you know IŌĆÖm pointing in that direction of lab.
- #8: using a sequence of images create a panorama, using panorama and one query image, detect features in both images and find the best matched features.
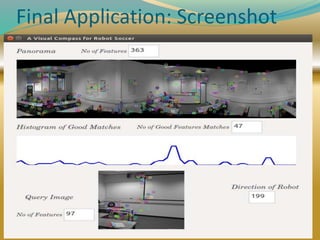
- #10: This is the final view of project, displaying panorama and query images with feature detected and also shown the number of detected features, and SURF algorithm match the best features, then create the histogram of these good matches. And find the direction of robot from peak of histogram.
- #11: This is the final view of project, displaying panorama and query images with feature detected and also shown the number of detected features, and SURF algorithm match the best features, then create the histogram of these good matches. And find the direction of robot from peak of histogram.
- #12: This is the final view of project, displaying panorama and query images with feature detected and also shown the number of detected features, and SURF algorithm match the best features, then create the histogram of these good matches. And find the direction of robot from peak of histogram.
- #13: This is the final view of project, displaying panorama and query images with feature detected and also shown the number of detected features, and SURF algorithm match the best features, then create the histogram of these good matches. And find the direction of robot from peak of histogram.
- #14: This is the final view of project, displaying panorama and query images with feature detected and also shown the number of detected features, and SURF algorithm match the best features, then create the histogram of these good matches. And find the direction of robot from peak of histogram.
- #15: This is the graph of experimental result, shown the result direction of angle with different algorithm and expected result. By comparing the expected result and actual output result, we find the 18 % error with SURF and 29% error with SIFT algorithm.
- #16: In the previous slide graph shown direction for image29 and image30 both have same direction of view 327 with SIFT. image35 have zero feature detected, direction of view never find with SUF but SIFT detector result 266 degree
- #18: The reason is weŌĆÖll have a different visual map those possible covered much more features to compare query image, and reduced the number of error.