
















![źĻ®`ź└®`ż╬øQČ©
? źĻ®`ź└®`▀x│÷ż╚żżż”▀^│╠żŽż╩żż
? Ė„źßź¾źą®`ż¼gossipźūźĒź╚ź│źļżŪ═¼Ų┌żĄżņż┐źßź¾źą®`źĻź╣ź╚ż½żķČ└┴óż╦øQżßżļ
? źĻ®`ź└®`żŽunreachableżŪż╩żżźßź¾źą®`ż╬ż”ż┴Upż╚Leavingū┤æBż╬żŌż╬ż“ā׎╚Ą─ż╦▀xÆkżĘĪóźóź╔źņź╣Ēśż╦üKż┘żŲŽ╚Ņ^ż╬żŌż╬
/**
* Up|Leaving, Joining, Exiting, Downż╬Ēśż╦üKż┘Ž╚Ņ^ż╬żŌż╬ż¼źĻ®`ź└®`ĪŻ═¼żĖū┤æBż╬ł÷║ŽūŅąĪż╬źóź╔źąźżź╣ż╬żŌż╬ż“▀xżųĪŻź│®`ź╔żŽęįŽ┬ż“▓╬ššĪŻ
* https://github.com/akka/akka/blob/v2.4.10/akka-cluster/src/main/scala/akka/cluster/Gossip.scala#L190-L196
*/
val leader = reachableMembers.min(Ordering.fromLessThan[Member] { (a, b) ?
(a.status, b.status) match {
case (as, bs) if as == bs ? Member.addressOrdering.compare(a.address, b.address) <= 0
case (Down, _) ? false
case (_, Down) ? true
case (Exiting, _) ? false
case (_, Exiting) ? true
case (Joining, _) ? false
case (_, Joining) ? true
case _ ? Member.addressOrdering.compare(a.address, b.address) <= 0
}
})](https://image.slidesharecdn.com/akkacluster-161008021009/85/Akka-Cluster-19-320.jpg)


















Akka Clusterż╬─═šŽ║”įOėŗ
- 1. Akka Clusterż╬ ─═šŽ║”įOėŗ ░▓╠’įŻĮķ Scala ķv╬„ 2016 ź╣źį®`ź½®`ź╬®`ź╚ https://github.com/TanUkkii007/blog/blob/master/akka_cluster_resilience.md
- 2. ūį╝║ĮBĮķ ? ░▓╠’įŻĮķ ? @TanUkkii007 ? ¢|Š®żŪScalaż╬╩╦╩┬ż“żĘżŲżżż▐ż╣ ? Akka ║├żŁ
- 3. Akka Clusterż╬▀mė├ŅIė“ Basically Soft state Eventually consistent Available client-facingżŪ ż╩Ęų╔óźĘź╣źŲźÓ
- 4. Akka Clusterż“╩╣ż”└¹ĄŃ ? ╬╗ų├═Ė▀^ąį ? źĄ®`źėź╣ż╬│╔ķLż╦║Žż’ż╗żŲź╣ź▒®`źļæķ┬įż“ŪążĻ╠µż©żķ żņżļ ? ź╣ź▒®`źļæķ┬įż¼ēõż’ż├żŲżŌź│®`ź╔ż¼ēõż’żķż╩żż ? ź©ź│źĘź╣źŲźÓ ? źĘźŃ®`źŪźŻź¾ź░żõźņźūźĻź▒®`źĘźńź¾ż╩ż╔ĪóĘų╔óźĘź╣źŲ źÓżŪżĶż»ė├żżżļźóźļź┤źĻź║źÓż“īgū░żĘż┐ÆłÅłż¼żóżļ
- 6. Akka Clusterż╚żŽŻ┐ ? ź»źķź╣ź┐®`ż╬źßź¾źą®`źĘź├źū╣▄└Ēż“ąąż”AkkaÆłÅł ? Amazon Dynamożõriakż╦ė░Ēæż“╩▄ż▒żŲżżżļ ? gossipźūźĒź╚ź│źļż╦żĶżļźßź¾źą®`ż╬ū┤æBü╗▓źż╚Īó failure detectorż╦żĶżļšŽ║”Ś╩ų¬ż“┐╔─▄ż╦ż╣żļ
- 7. failure detector ? ź»źķź╣ź┐®`ż╬źßź¾źą®`żŽ╗źżżż╦źŽ®` ź╚źė®`ź╚ż“╦═żĻ║Žż├żŲżżżļ ? failure detectorżŽźŽ®`ź╚źė®`ź╚ż“żŌ ż╚ż╦źßź¾źą®`ż╬╔·╦└ż“═Ų£yż╣żļ ? ╔·żŁżŲżżżļźßź¾źą®`żŽreachableĪó ╦└ż¾żŪżżżļźßź¾źą®`żŽunreachable ż╚ź▐®`ź»ż╣żļ
- 8. gossipźūźĒź╚ź│źļż╚ źßź¾źą®`źĘź├źūźķźżźšźĄźżź» źļ ? źßź¾źą®`ż╦żŽū┤æBż¼żóżĻĪógossipźūźĒź╚ź│źļżŪ╦¹ż╬źßź¾ źą®`ż╚ū┤æBż“═¼Ų┌ż╣żļ ? gossipģ¦╩°Ģrż╦ę╗ęŌż╦øQż▐żļźĻ®`ź└®`ż╚żżż”ę█ĖŅż¼żóżļ ? źĻ®`ź└®`ż¼źßź¾źą®`ż╬ū┤æBż“ēõż©żļąą×ķż“źĻ®`ź└®`źóź» źĘźńź¾ż╚żżż” ? ź»źķź╣ź┐®`ż╦▓╬╝ėż╣żļźßź¾źą®`żŽjoiningū┤æBż½żķ╩╝ż▐żļ ? źĻ®`ź└®`żŽjoiningū┤æBż╬źßź¾źą®`ż“upū┤æBż╦żĘĪ󟻟ķź╣ ź┐®`ż╦▓╬╝ėżĄż╗żļ ? downū┤æBż╦ż╩ż├ż┐źßź¾źą®`żŽĪóźĻ®`ź└®`ż╦żĶż├żŲ removedū┤æBż╦żĄżņĪ󟻟ķź╣ź┐®`ż½żķ╚ĪżĻ│²ż½żņżļ doc.akka.io
- 10. ╣╩šŽż╬ģg╬╗Ż║źūźĒź╗ź╣ ? ╣╩šŽż╬ģg╬╗ż“źūźĒź╗ź╣ż╚żżż” ? źóź»ź┐®`źūźĒź░źķź▀ź¾ź░żŪżŽźūźĒź╗ź╣żŽźóź»ź┐®` ? ż│ż╬░k▒ĒżŪżŽAkka Clusterż╬Ż▒ź╬®`ź╔ż“źūźĒź╗ź╣ż╚ż╣żļ ? ż─ż▐żĻAkka Clusterż╬UNIXźūźĒź╗ź╣ż╚═¼┴x
- 11. ╣╩šŽż╬ĘNŅÉ ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽ ź¬ź▀ź├źĘźńź¾Ż©ŪążĻÆ╬żŲŻ®╣╩šŽ ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽ źėźČź¾ź┴ź¾Ż©╚╬ęŌŻ®╣╩šŽ Reliable and secure distributed programming, Ch.2
- 12. ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽ ź¬ź▀ź├źĘźńź¾Ż©ŪążĻÆ╬żŲŻ®╣╩šŽ ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽ źėźČź¾ź┴ź¾Ż©╚╬ęŌŻ®╣╩šŽ Reliable and secure distributed programming, Ch.2 ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽ
- 13. ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽ ? š²│Żż╦äI└Ēż“īgąążĘżŲżżż┐źūźĒź╗ź╣ż¼żóżļĢr┐╠ęįĮĄ äI└Ēż“═Żų╣żĘżŲŻ▓Č╚ż╚æ°żķż╩żż╣╩šŽ ? ╣╩šŽż╬ż╩ż½żŪżŌż├ż╚żŌģg╝ā ? Akka Clusterż╬źņźżźõ®`żŪ┐╝ż©ż╩ż▒żņżąż╩żķż╩żż╣╩ šŽż╬ż█ż▄╚½żŲżŽż│żņ
- 14. ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽżŪ ═Żų╣ż╣żļäI└Ē ? unreachableż╩źßź¾źą®`ż¼żżżļż╚ĪógossipźūźĒź╚ź│źļżŪū┤ æBż“═Ļ╚½ż╦═¼Ų┌żŪżŁż╩żżŻ©gissipĘŪģ¦╩°ū┤æBŻ® ? ź»źķź╣ź┐®`ż╬ū┤æBż“ēõż©żļźĻ®`ź└®`źóź»źĘźńź¾ż¼ąąż©ż╩ ż»ż╩żļ ? Ī·źßź¾źą®`ż╬ūĘ╝ėż¼żŪżŁż╩żż
- 15. gossipĘŪģ¦╩°ū┤æBż╬ĮŌøQ ? unreachableż╩źßź¾źą®`ż╬źŽ®`ź╚źė®`ź╚ ż¼╗žÅ═żĘżŲfailure detectorż╦żĶż├żŲį┘żė reachableż╦ż╩żļ ? unreachableż╩źßź¾źą®`ż“downū┤æBż╦ż╣ żļ ź»źķź╣ź┐®`ż╬źßź¾źą®`ż¼ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż“Ųż│ż╣ż╚ĪóżĮż╬źß ź¾źą®`ż╦gossipźūźĒź╚ź│źļż╦żĶż├żŲź»źķź╣ź┐®`ż╬ū┤æBż“ü╗▓źżŪżŁż╩ż» ż╩żļĪŻż│ż╬ż╚żŁgossipżŽģ¦╩°żĘż╩żżĪŻ gossipż╬ĘŪģ¦╩°ż“ĮŌøQż╣żļĘĮĘ© doc.akka.io
- 16. Auto-downing ? źŪźšź®źļź╚żŪżŽunreachableż╩źßź¾źą®`ż“ūįäėĄ─ż╦ downū┤æBż╦żŽżĘż╩żż ? źĻ®`ź└®`ż¼unreachableż╩źßź¾źą®`ż“ųĖČ©Ģrķgßßż╦ ūįäėĄ─ż╦downż╣żļÖC─▄ż╦auto-downż¼żóżļ ? auto-downżŽ╩╣ż├żŲżŽż╩żķż╩żż Ż▀╚╦╚╦╚╦╚╦╚╦╚╦╚╦╚╦Ż▀ ŻŠ Ż╝ Ż■Y^Y^Y^Y^Y^Y^YŻ■ doc.akka.io
- 18. split brainå¢Ņ} ? failure detectorż¼źßź¾źą®`ż“╦└ż╚═Ų Č©żĘż┐ż╚żĘżŲżŌĪóīgļHż╦żŽ╔·żŁżŲżż żļł÷║Žż¼żóżļ ? ╔·żŁżŲżżżļźßź¾źą®`ż“ź»źķź╣ź┐®`ż½ żķĘųļxż╣żļż╚ĪóĮY╣¹Ą─ż╦ź»źķź╣ź┐®` ż¼Ęų┴čż╣żļå¢Ņ}ż“split brainå¢Ņ}ż╚żż ż” ? ĘųļxżĘż┐ź»źķź╣ź┐®`ż╬ū┤æBżŽ═¼Ų┌│÷ └┤ż║Īóš`ż├ż┐Ūķł¾ż“ź»źķźżźóź¾ź╚żõ DBż╦ü╗ż©żļ
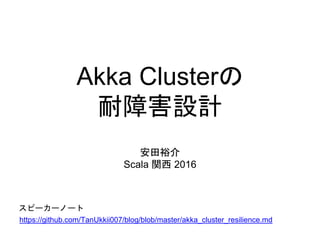
- 19. źĻ®`ź└®`ż╬øQČ© ? źĻ®`ź└®`▀x│÷ż╚żżż”▀^│╠żŽż╩żż ? Ė„źßź¾źą®`ż¼gossipźūźĒź╚ź│źļżŪ═¼Ų┌żĄżņż┐źßź¾źą®`źĻź╣ź╚ż½żķČ└┴óż╦øQżßżļ ? źĻ®`ź└®`żŽunreachableżŪż╩żżźßź¾źą®`ż╬ż”ż┴Upż╚Leavingū┤æBż╬żŌż╬ż“ā׎╚Ą─ż╦▀xÆkżĘĪóźóź╔źņź╣Ēśż╦üKż┘żŲŽ╚Ņ^ż╬żŌż╬ /** * Up|Leaving, Joining, Exiting, Downż╬Ēśż╦üKż┘Ž╚Ņ^ż╬żŌż╬ż¼źĻ®`ź└®`ĪŻ═¼żĖū┤æBż╬ł÷║ŽūŅąĪż╬źóź╔źąźżź╣ż╬żŌż╬ż“▀xżųĪŻź│®`ź╔żŽęįŽ┬ż“▓╬ššĪŻ * https://github.com/akka/akka/blob/v2.4.10/akka-cluster/src/main/scala/akka/cluster/Gossip.scala#L190-L196 */ val leader = reachableMembers.min(Ordering.fromLessThan[Member] { (a, b) ? (a.status, b.status) match { case (as, bs) if as == bs ? Member.addressOrdering.compare(a.address, b.address) <= 0 case (Down, _) ? false case (_, Down) ? true case (Exiting, _) ? false case (_, Exiting) ? true case (Joining, _) ? false case (_, Joining) ? true case _ ? Member.addressOrdering.compare(a.address, b.address) <= 0 } })
- 21. split brainå¢Ņ}ż“ĮŌøQż╣żļż╦żŽ ? źĻ®`ź└®`żĶżĻżŌš¹║Žąįż╬Ė▀żżĘĮĘ©żŪøQČ©żŪżŁĪó downż“╣¹ż┐ż╗żļę█ĖŅżŽ║╬ż½Ż┐ ? Ż▓ż─ęį╔Žż╦ĘųĖŅżĄżņżļł÷║ŽĪóż╔żņż¼š²żĘżżź»źķź╣ź┐ ®`ż╩ż╬ż½Ż┐ ? š²żĘż»ż╩żżź»źķź╣ź┐®`ż“øQżßż┐ż╚żĘżŲĪóżĮż╬źßź¾źą ®`ż“ż╔ż”ż╣ż┘żŁż½Ż┐
- 22. split brain resolver ? Keep Reference ? Keep Oldest ? Static Quorum ? Keep Majority ? Lightbend Reactive Platform ? TanUkkii007/akka-cluster-custom-downing split-brain-resolverż╬ź╣ź╚źķźŲźĖ
- 23. Keep Oldest ? ūŅ╣┼ż╬źßź¾źą®`ż¼żżżļé╚ż“š²ż╬ź»źķź╣ź┐®`ż╚ż╣żļ ? ūŅ╣┼ż╬źßź¾źą®`ż╚żŽŲäėĢrż╬ź┐źżźÓź╣ź┐ź¾źūż¼żŌż├ż╚żŌąĪżĄżżżŌż╬ ? żĮż”żŪż╩żżé╚ż╬źßź¾źą®`żŽūįżķźĘźŃź├ź╚ź└ź”ź¾ż╣żļ ? unreachableż╩źßź¾źą®`ż“downż╣żļę█ĖŅżŽūŅ╣┼źßź¾źą®`ż¼ĄŻż” ? ūŅ╣┼ż╬źßź¾źą®`żŽgossipĘŪģ¦╩°Ģrż╦żŌę╗ęŌż╦øQż▐żļŻ©Ī∙└²═ŌżóżĻŻ® ? ┐╔ė├ąįż╬ĄŃżŪå¢Ņ}żóżĻĪŻūŅ╣┼ż╬źßź¾źą®`ż¼╣╩šŽżĘż┐ł÷║ŽĪó╚½ź»źķź╣ź┐®` ż¼źĘźŃź├ź╚ź└ź”ź¾ż╣żļĪŻŻ©ź¬źūźĘźńź¾żŪ╗ž▒▄┐╔─▄Ż® val oldest = members.filterNot(_.status == Removed).min(Member.ageOrdering)
- 24. Keep Oldest
- 25. Static Quorum ? ▓ą┤µźßź¾źą®`ż¼quorum sizeż╦£║ż┐ż╩żżł÷║ŽĪóżĮż╬źßź¾źą®`ż“ downżĘż╣żļ ? ╦¹ż╬źßź¾źą®`ż“downż╣żļę█ĖŅżŽźĻ®`ź└®`ż¼ĄŻż” ? quorum-size * 2 - 1ż“│¼ż©żļźßź¾źą®`ż“ūĘ╝ėżĘż╩żżŽ▐żĻsplit brainżŽ ż¬żŁż╩żż ? quorum-sizeż╚Štź╬®`ź╔╩²żŪ┐╔ė├ąįż“š{╣Ø┐╔─▄ ? źßź¾źą®`ż╬╩²ż“╣╠Č©żĘż╩ż▒żņżąż╩żķż╩żżĄŃż¼╚§ĄŃĪŻquorumż“▀mė├ ż╣żļźĒ®`źļż“Ž▐Č©żĘżŲ╦¹ż╬źĒ®`źļż╬źßź¾źą®`╩²ż“äėĄ─ż╦ż╣żļż╚┴╝ żżĪŻ
- 26. Static Quorum
- 27. FLP Impossibility Ī░ĘŪ═¼Ų┌ż╩źĘź╣źŲźÓż╦ż¬żżżŲżŽĪó ż┐ż└Ż▒ż─ż╬źūźĒź╗ź╣ż¼╣╩šŽżĘż┐ż└ż▒żŪżŌĪó ═ĻĶĄż╦║ŽęŌżŪżŁżļĘų╔óźóźļź┤źĻź║źÓżŽ┤µį┌żĘż╩żżĪ▒ Fisher, Lynch, Paterson (1985) Impossibility of Distributed Consensus with One Faulty Process ═ĻĶĄż╩split brain resolverż╬ź╣ź╚źķźŲźĖżŽż╩żż
- 28. ź¬ź▀ź├źĘźńź¾Ż©ŪążĻÆ╬żŲŻ®╣╩šŽ ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽ źėźČź¾ź┴ź¾Ż©╚╬ęŌŻ®╣╩šŽ Reliable and secure distributed programming, Ch.2 ź¬ź▀ź├źĘźńź¾Ż©ŪążĻÆ╬żŲŻ®╣╩šŽ ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽ
- 30. Akka Remoteż╦ż¬ż▒żļ ź¬ź▀ź├źĘźńź¾╣╩šŽ ? źĘź╣źŲźÓźßź├ź╗®`źĖż“╦═ą┼żŪżŁż║ĪóźĒ®`ź½źļż╚źĻźŌ®`ź╚ż╬źóź»ź┐®`źĘ ź╣źŲźÓķgż╬ū┤æBż¼═¼Ų┌żŪżŁż╩ż»ż╩ż├ż┐ż╚żŁż╦ź¬ź▀ź├źĘźńź¾╣╩šŽż╚ż╩żļ ? źĘź╣źŲźÓźßź├ź╗®`źĖż╦żŽĪóźĻźŌ®`ź╚ź╣®`źč®`źąźżźČ®`ż╦╣▄└ĒżĄżņż┐źó ź»ź┐®`ż╬źķźżźšźĄźżź»źļźżź┘ź¾ź╚Īówatchż╦żĶżļ╦└╗Ņ▒OęĢĪóźĻźŌ®`ź╚ źóź»ź┐®`ż╬źŪźūźĒźżźßź¾ź╚ż¼żóżļ ? ż│ż╬ż╚żŁAkka Remoteż╬ū┤æBżŽquarantinedż╦ż╩żĻĪóżĮż╬źßź¾źą®`żŽ unreachableż½żķæ°ż├żŲż│żņż╩ż»ż╩żļ ? split brain resolverż“╩╣ė├żĘżŲżżżļł÷║ŽĪóunreachableż╩źßź¾źą®`żŽź» źķź╣ź┐®`ż½żķ╚ĪżĻ│²ż½żņĪó╚ĪżĻ│²ż½żņż┐źßź¾źą®`żŽźĘźŃź├ź╚ź└ź”ź¾ż╣ żļĪ·ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż╚╚½ż»═¼żĖÆQżżż╦ż╩żļ
- 31. ź¬ź▀ź├źĘźńź¾Ż©ŪążĻÆ╬żŲŻ®╣╩šŽ ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽ źėźČź¾ź┴ź¾Ż©╚╬ęŌŻ®╣╩šŽ Reliable and secure distributed programming, Ch.2 ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽ ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽ
- 33. Akka Clusterż╦ż¬ż▒żļ ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽ ? ź»źķź├źĘźÕżĘżŲ╚ĪżĻ│²ż½żņż┐ź╬®`ź╔ż¼į┘ŲäėżĘżŲź» źķź╣ź┐®`ż╦į┘╝ė╚ļż╣żļż│ż╚ż“Ū░╠ßż╚żĘżŲżżż╩żż ? ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽżŽż¬żŁż╩żż
- 34. źßź¾źą®`ż╬ūRäe ? Akka ClusterżŽźßź¾źą®`ż“hostname:port:uidż╬Ż│ż─ż╬ūRäeūėżŪ šJūRż╣żļ ? uidżŽźóź»ź┐®`źĘź╣źŲźÓŲäėĢrż╦░kąążĄżņżļźµź╦®`ź»ż╩ID ? ź█ź╣ź╚ż╚ź▌®`ź╚ż¼═¼żĖżŪżŌĪóį┘ŲäėżĘż┐ßßżŪżŽuidż¼«Éż╩żļ ? ż─ż▐żĻź»źķź├źĘźÕżĘżŲį┘ŲäėżĘż┐źūźĒź╗ź╣żŽĪóęįŪ░ż╬źūźĒź╗ź╣ ż╚äe╬’ż╚šJūRżĄżņżļ ? Ī·ą┬żĘż»ź»źķź╣ź┐®`ż╦╝ė╚ļż╣żļż│ż╚ż╚╚½ż»═¼żĖŻ║ź»źķź├źĘźÕ? źĻź½źąźĻ®`╣╩šŽżŽż¬żŁż╩żż
- 35. ╠KżĻŻ©incarnationŻ®ź╬®`ź╔ ? Q: ź»źķź├źĘźÕżĘż┐źßź¾źą®`żŽunreachableż╚ż╩ż├żŲźĻ®`ź└®`źóź»źĘźńź¾ż¼ ż╚żņż╩ż»ż╩żļż┐żßĪóį┘ŲäėżĘżŲżŌź╬®`ź╔ż¼ź»źķź╣ź┐®`ż╦į┘╝ė╚ļżŪżŁżļż╬ ż½Ż┐ ? A: żŪżŁżļ ? ź»źķź╣ź┐®`ż╬źßź¾źą®`ż╚═¼żĖź█ź╣ź╚Ż║ź▌®`ź╚ż╬ź┌źóż“żŌż─źßź¾źą®`ż¼╝ė ╚ļŻ©joiningŻ®żĘżŲżŁż┐ł÷║ŽĪóźĻ®`ź└®`żŽ╣┼żżźßź¾źą®`ż“ūįäėĄ─ż╦downż╣ żļ ? ═¼żĖź█ź╣ź╚Ż║ź▌®`ź╚ż╬ź┌źóż“żŌż─źßź¾źą®`ż¼═¼Ģrż╦Ż▓ż─┤µį┌ż╣żļż│ż╚żŽ żóżĻż©ż╩żżĪŻ╣┼żżźßź¾źą®`żŽź»źķź├źĘźÕżĘż┐ż│ż╚ż“źĻ®`ź└®`żŽ┼ąČŽżŪżŁ żļĪŻ ? auto-downżõsplit brain resolverż“╩╣ż’ż╩ż»żŲżŌż│ż╬ÖC─▄żŽāPż»
Editor's Notes
- #2: Akka Clusterż╬─═šŽ║”įOėŗż╦ż─żżżŲįÆżĘż▐ż╣ĪŻTISżĄż¾ż╬Ū░ź╗ź├źĘźńź¾ż“┬äżżżŲż½żķż│ż╬░k▒Ēż╦┼RżÓż╬ż¼ż¬äßżßż╩ż╬żŪż╣ż¼ĪóŪ░ż╬ź╗ź├źĘźńź¾ż╦▓╬╝ėżĘż┐╚╦żŽż╔ż╬ż░żķżżżżż▐ż╣ż½Ż┐ żóż╚Akka Clusterż“╩╣ż├ż┐żĻįćżĘż┐ż│ż╚ż╬żóżļĘĮżŽż╔żņż░żķżżżżż▐ż╣ż½Ż┐ ┘|å¢OKż╦ż╣żļż½ĪŻ ź╣źį®`ź½®`ź╬®`ź╚ż╬źĻź¾ź»ż“Åłż├żŲżóżļż╬żŪż┤╗Ņė├ż»ż└żĄżżĪŻ
- #3: ūį╝║╔▄ĮķżŪż╣ĪŻ░▓╠’įŻĮķż╚żżżżż▐ż╣ĪŻ┤Ī░ņ░ņ▓╣║├żŁżŪż╣ĪŻżĶżĒżĘż»ż¬įĖżżżĘż▐ż╣ĪŻ
- #4: Akka Clusterż╚żŽ║╬ż½ż“šh├„ż╣żļż▐ż©ż╦Īóż╔ż│żŪ╗Ņ▄Sż╣żļ╝╝ągż½ż“żŽżĖżßż╦ż¬įÆżĘż▐ż╣ĪŻAkka ClusterżŽBASEż╩źĘź╣źŲźÓż“śŗ║Bż╣żļļHż╦šµü²ż“░kō]żĘż▐ż╣ĪŻBASEż╚żŽsoft-stateż╦żĶżļĖ▀żż┐╔ė├ąįż╚ĮY╣¹š¹║Žąįż╦żĶżļĖ▀żżź╣ź▒®`źķźėźĻźŲźŻż“ų„▌Sż╦ż╣żļźóźūźĒ®`ź┴żŪż╣ĪŻź»źķź”ź╔ż╬ĄŪł÷ż╦żĶżĻĪóęįŪ░żĶżĻ꯿½ż╦║åģgż╦źĄ®`źą®`ż“ź╣ź▒®`źļźóź”ź╚/ź╣ź▒®`źļźżź¾żĄż╗żļż│ż╚ż¼żŪżŁżļżĶż”ż╦ż╩żĻż▐żĘż┐ż¼Īóė└ŠA╗»īėżŽź└źżź╩ź▀ź├ź»ż╦ź╣ź▒®`źļżĄż╗żļż│ż╚żŽż▐ż└ļyżĘżżż╬ż¼¼Fū┤żŪż╣ĪŻ┐╔ė├ąįż“Ė▀żßżļż╦żŽź»źķźżźóź¾ź╚ż╦żĶżĻĮ³żżźņźżźõ®`żŪsoft-stateż“ÆQż”ż│ż╚ż¼ųžę¬ż╦ż╩ż├żŲżŁż▐ż╣ĪŻź└źżź╩ź▀ź├ź»ż╩źßź¾źą®`╣▄└Ēż╚ū┤æB╣▄└Ēż“Ą├ęŌż╚ż╣żļż╬ż¼Akka ClusterżŪż╣ĪŻ
- #5: BASEż╩źĘź╣źŲźÓż“śŗ║Bż╣żļ╝╝ągż╬ųążŪżŌAkka Clusterż“▀xżų└Ēė╔żŽĪóźóź»ź┐®`ż╬╬╗ų├═Ė▀^ąįż¼┤¾żŁżżżŪżĘżńż”ĪŻAkkażõErlangż“╩╝żßż╚ż╣żļźóź»ź┐®`źūźĒź░źķź▀ź¾ź░żŪżŽĪó╬╗ų├═Ė▀^ąįż╦żĶżĻż╔ż╬ź╣źņź├ź╔żŪźóź»ź┐®`ż¼äėżżżŲżŌ═¼żĖżĶż”ż╦äėū„ż╣żļż│ż╚ż¼▒Żį^żĄżņżŲżżż▐ż╣ĪŻż│ż╬ąį┘|ż╦żĶżĻź▐źĘź¾ż╦ź│źóż“ūĘ╝ėż╣żņżąź│®`ź╔ż“ēõż©żļż│ż╚ż╩ż»źóźūźĻź▒®`źĘźńź¾ż“ź╣ź▒®`źļźóź├źūż╣żļż│ż╚ż¼żŪżŁż▐ż╣ĪŻ═¼śöż╦źóź»ź┐®`żŽż╔ż╬źĄ®`źą®`żŪäėżżżŲżŌ═¼żĖżĶż”ż╦äėū„ż╣żļżŪĪóż█ż╚ż¾ż╔ź│®`ź╔ż“ēõż©ż║ż╦ź╣ź▒®`źļźóź”ź╚ż╦æķ┬įż“ŪążĻ╠µż©żļż│ż╚ż¼żŪżŁż▐ż╣ĪŻ╬╗ų├═Ė▀^ąįżŽźĄ®`źėź╣ż╬Ė„Č╬ļAż╦ż¬żżżŲ▀mżĘż┐ź╣ź▒®`źļæķ┬įż“╔┘ż╩żżź│ź╣ź╚żŪ┐╔─▄ż╦żĘż▐ż╣ĪŻĄ═ź│ź╣ź╚ż╚żŽŠ▀╠ÕĄ─ż╦żŽĪóż╔ż╬żĶż”ż╩ź╣ź▒®`źļæķ┬įż“ż╚żļż½ż╦żĶż├żŲź│®`ź╔ż“ēõż©żļ▒žę¬ż¼ż╩żżż╚żżż”ĄŃż╚Īóź╣źņź├ź╔żõč}╩²ź▐źĘź¾żžż╬Ęų╔óŁhŠ│ż╬č}ļjż╩źŲź╣ź╚ż“Ģ°ż»┴┐ż¼╔┘ż╩ż»żŲ£gżÓĄŃż╚Īóż╣ż┘żŲż╬ź┴®`źÓźßź¾źą®`ż¼Ęų╔óźūźĒź░źķź▀ź¾ź░ż╦Š½═©żĘżŲżżżļ▒žę¬ż¼ż╩żżż╚żżż”ĄŃżŪż╣ĪŻż▐ż┐ź©ź│źĘź╣źŲźÓżŌ„╚┴”ż╬Ż▒ż─żŪż╣ĪŻ
- #6: Akka Clusterż╬╗∙▒Šż“įÆżĘż▐ż╣ĪŻŪ░ż╬ź╗ź├źĘźńź¾żŪTISżĄż¾ż¼Akka Clusterż“įöżĘż»šh├„żĘżŲż»żņż┐ż╬żŪĪóż│ż│żŪżŽ╗∙ĄAż“żĄżķżĻż╚šh├„ż╣żļż╦ż╚ż╔żßż▐ż╣ĪŻ
- #7: Akka Clusterż╚żŽĪ󟻟ķź╣ź┐®`ż╬źßź¾źą®`źĘź├źū╣▄└Ēż“ąąż”Akkaż╬ÆłÅłżŪż╣ĪŻAmazon Dynamożõriakż╦ė░Ēæż“╩▄ż▒żŲż¬żĻĪóĘŪųąčļ╝»śžĄ─żŪīØ│Ųż╩Ęų╔óźĘź╣źŲźÓż“śŗ║Bż╣żļż┐żßż╬╗∙▒Pż╚ż╩żĻż▐ż╣ĪŻAkka Clusterż╦żŽų„ż╦Ż▓ż─ż╬ÖC─▄ż¼żóżĻż▐ż╣ĪŻgossipźūźĒź╚ź│źļż╦żĶżļźßź¾źą®`ż╬ū┤æBü╗▓źż╚Īófailure detectorż╦żĶżļšŽ║”Ś╩ų¬żŪż╣ĪŻ
- #8: Akka Clusterż╬źßź¾źą®`żŽ╗źżżż╦źŽ®`ź╚źė®`ź╚ż“╦═żĻ║Žż├żŲżżż▐ż╣ĪŻfailure detectorżŽźŽ®`ź╚źė®`ź╚ż“żŌż╚ż╦źßź¾źą®`ż╬╔·╦└ż“═Ų£yżĘż▐ż╣ĪŻfailure detectorżŽ╔·żŁżŲżżżļźßź¾źą®`ż“reachableĪó╦└ż¾żŪżżżļźßź¾źą®`ż“unreachableż╚ź▐®`ź»żĘż▐ż╣ĪŻ
- #9: Akka Clusterż╬źßź¾źą®`ż╦żŽū┤æBż¼żóżĻż▐ż╣ĪŻgossipźūźĒź╚ź│źļż“╩╣ż├żŲż¬╗źżżż╦ū┤æBż“═¼Ų┌żĘż▐ż╣ĪŻgossipźūźĒź╚ź│źļżŪ╚½źßź¾źą®`ż╦ū┤æBż“═¼Ų┌żĘż┐ż╚żŁż╦Īóę╗ęŌż╦øQż▐żļźĻ®`ź└®`ż╚żżż”ę█ĖŅż¼żóżĻż▐ż╣ĪŻźĻ®`ź└®`żŽźßź¾źą®`ż╬ū┤æBż“ēõż©żļż│ż╚ż╦ž¤╚╬ż¼żóżĻĪóżĮż╬ąą×ķż“źĻ®`ź└®`źóź»źĘźńź¾ż╚żżżżż▐ż╣ĪŻ ź»źķź╣ź┐®`ż╦▓╬╝ėż╣żļźßź¾źą®`żŽjoiningū┤æBż½żķ╩╝ż▐żĻż▐ż╣ĪŻźĻ®`ź└®`żŽjoiningū┤æBż╬źßź¾źą®`ż“upū┤æBż╦żĘĪ󟻟ķź╣ź┐®`ż╦▓╬╝ėżĄż╗ż▐ż╣ĪŻupū┤æBż½żķź»źķź╣ź┐®`ż╬źßź¾źą®`ż╚šJūRżĄżņż▐ż╣ĪŻż▐ż┐downū┤æBż╦ż╩ż├ż┐źßź¾źą®`żŽĪóźĻ®`ź└®`ż╦żĶż├żŲremovedū┤æBż╦żĄżņĪ󟻟ķź╣ź┐®`ż½żķ╚ĪżĻ│²ż½żņż▐ż╣ĪŻż│żņż¼ź»źķź╣ź┐®`źßź¾źą®`ż╬źķźżźšźĄźżź»źļżŪż╣ĪŻ
- #10: ż│ż│ż½żķż¼ż│ż╬░k▒Ēż╬▒ŠŅ}żŪż╣ĪŻŪ░ż╬TISżĄż¾ż╬ź╗ź├źĘźńź¾ż¼Akka Clusterż╬╣Ōż“╩ŠżĘż┐ż╚żĘż┐żķĪóż│ż│ż½żķżŽė░ż╬▓┐ĘųżŪż╣ĪŻż│żņż½żķAkka ClusterżŪż╔ż╬żĶż”ż╩šŽ║”ż¼ŲżŁżļż╬ż½įÆżĘż▐ż╣ĪŻż╣ż┘żŲż╬Ęų╔óźĘź╣źŲźÓż╦čįż©żļż│ż╚żŪż╣ż¼Īó─═šŽ║”įOėŗżŽĘŪ│Żż╦ļyżĘżżżŪż╣ĪŻżĘż½żĘż│ż│ż“ü\żĻįĮż©żŲż│żĮü╗ĮyĄ─ż╩źĘź╣źŲźÓżŪżŽĄĮ▀_żŪżŁż╩żżź╣ź▒®`źķźėźĻźŲźŻż╚┐╔ė├ąįż“╩ųż╦╚ļżņżļż│ż╚ż¼żŪżŁżļż╬żŪż╣ĪŻ
- #11: ─═šŽ║”ąįż╬ĮŌšhż╦╚ļżļŪ░ż╦Īó╣╩šŽż╬ģg╬╗ż“Č©┴xżĘżŲż¬żŁż▐żĘżńż”ĪŻ╣╩šŽż╬ģg╬╗ż“źūźĒź╗ź╣ż╚żżżżż▐ż╣ĪŻźóź»ź┐®`źūźĒź░źķź▀ź¾ź░żŪżŽšŽ║”ż╬ģg╬╗żŽźóź»ź┐®`żŪż╣ż¼Īóż│ż│żŪżŽAkka Clusterż╬Ż▒ź╬®`ź╔ż╚Č©┴xżĘż▐ż╣ĪŻż│żņżŽAkka ClusterźóźūźĻź▒®`źĘźńź¾ż╬UNIXźūźĒź╗ź╣ż╚═¼┴xż╦ż╩żĻż▐ż╣ĪŻ
- #12: ─═šŽ║”ąįż“ūhšōż╣żļļHż╦Īóż╔ż╬żĶż”ż╩╣╩šŽż╦īØäIż╣żļż╬ż½ż“Č©┴xżĘż╩ż▒żņżąż╩żĻż▐ż╗ż¾ĪŻ╣╩šŽż╦żŽų„ż╦Ż┤ż─ż╬ĘųŅÉż¼żóżĻż▐ż╣ĪŻ ż│ż╬Ż┤ż─ż╬╣╩šŽżŽżĮżņżŠżņŽ┬╬╗ż╬╣╩šŽż╬╔Ž╬╗╝»║Žż╦ż╩ż├żŲżżż▐ż╣ĪŻ╔Ž╬╗ż╬╣╩šŽż█ż╔īØäIż¼ļyżĘżżżŪż╣ĪŻ
- #14: š²│Żż╦äI└Ēż“īgąążĘżŲżżż┐źūźĒź╗ź╣ż¼żóżļĢr┐╠ęįĮĄäI└Ēż“═Żų╣żĘżŲŻ▓Č╚ż╚æ°żķż╩żż╣╩šŽż“ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż╚żżżżż▐ż╣ĪŻ╣╩šŽż╬ż╩ż½żŪżŌż├ż╚żŌģg╝āż╩╣╩šŽżŪż╣ĪŻßßż╦żĶżĻ╔Ž╬╗ż╬╣╩šŽż“šh├„żĘż▐ż╣ż¼ĪóAkka Clusterż╬źņźżźõ®`żŪ┐╝ż©ż╩ż▒żņżąż╩żķż╩żż╣╩šŽż╬ż█ż▄╚½żŲżŽź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽżŪż╣ĪŻ
- #15: ź»źķź╣ź┐®`ż╬źßź¾źą®`ż╬Ż▒ż─ż¼ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż“Ųż│żĘż┐ł÷║ŽĪóż╔ż╬äI└Ēż¼ų╣ż▐żļż╬ż½├„żķż½ż╦żĘż▐żĘżńż”ĪŻAkka Clusterż╬źņźżźõ®`żŪżŽĪóż│ż╬ż╚żŁ═Żų╣ż╣żļäI└ĒżŽźĻ®`ź└®`źóź»źĘźńź¾żŪż╣ĪŻźßź¾źą®`ż╬ę╗▓┐ż¼ź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż“Ųż│żĘż┐ł÷║ŽĪóżĮż╬źßź¾źą®`żŽfailure detectorż╦żĶż├żŲunreachableż╚┼ąČ©żĄżņż▐ż╣ĪŻż│ż╬ż╚żŁź»źķź╣ź┐®`żŽ▒Ż╩žĄ─ż╦š±żļ╬ĶżżĪ󟻟ķź╣ź┐®`ż╬ū┤æBż“ēõż©żļźĻ®`ź└®`źóź»źĘźńź¾ż“ąąż”ż│ż╚ż“żõżßż▐ż╣ĪŻŠ▀╠ÕĄ─ż╦żŽź»źķź╣ź┐®`ż╦ą┬ż┐ż╩źßź¾źą®`ż“ūĘ╝ėż╣żļż│ż╚ż¼żŪżŁż╩ż»ż╩żĻż▐ż╣ĪŻ
- #16: źĻ®`ź└®`źóź»źĘźńź¾ż“į┘żėąąż©żļżĶż”ż╦ż╣żļż╦żŽĪóunreachableż╩źßź¾źą®`ż¼failure detectorż╦żĶż├żŲį┘żėreachableż╚ż╩żļż½Īódownū┤æBż╦ż╣żļ▒žę¬ż¼żóżĻż▐ż╣ĪŻdownū┤æBż╦ż╣żļż╚ĪóżĮż╬ū┤æBēõ╗»ż“ż█ż½ż╬╚½źßź¾źą®`ż¼ėQ£yżĘżŲź┤źĘź├źūżŽģ¦╩°żĘĪóżõż¼żŲźĻ®`ź└®`żŽdownżĘż┐źßź¾źą®`ż“removedū┤æBż╦żĘżŲź»źķź╣ź┐®`ż½żķ╚ĪżĻ│²żŁż▐ż╣ĪŻdownū┤æBż╦ż╩żļż╚źßź¾źą®`ż╬ūĘ╝ėż¼┐╔─▄ż╦ż╩żĻż▐ż╣ĪŻ
- #17: źŪźšź®źļź╚żŪżŽĪóAkka ClusterżŽunreachableż╩źßź¾źą®`ż“ūįäėĄ─ż╦downū┤æBż╦żŽżĘż▐ż╗ż¾ĪŻż─ż▐żĻ╚╦ż╬╩ųżŪdownż╣żļ▒žę¬ż¼żóżĻż▐ż╣ĪŻ ūįäėĄ─ż╦╣╩šŽżĘż┐źßź¾źą®`ż“downż╣żļż╦żŽĪóauto-downż╚żżż”ź¬źūźĘźńź¾ż“ėąä┐ż╦żĘż▐ż╣ĪŻż│ż╬ÖC─▄ż“ėąä┐ż╦ż╣żļż╚Īóunreachableż╩źßź¾źą®`żŽųĖČ©Ģrķgßßż╦ūįäėĄ─ż╦downżĘż▐ż╣ĪŻżĘż½żĘż│ż╬ÖC─▄żŽ╩╣ż├żŲżŽżżż▒ż▐ż╗ż¾ĪŻż╩ż╝╩╣ż├żŲżŽż╩żķż╩żżż╬ż½Īó┐╝ż©żŲż▀ż▐żĘżńż”ĪŻ
- #18: Ė∙▒ŠĄ─ż╩å¢Ņ}żŽĪófailure detectorż¼źßź¾źą®`ż“unreachableż╚┼ąČ©żĘż┐ż╚żŁĪóżĮż╬źßź¾źą®`żŽ▒ŠĄ▒ż╦╦└ż¾żŪżżżļż╬ż½Īóź═ź├ź╚ź’®`ź»▀WčėżõĘųČŽż╩ż╬ż½ĪóGCż╦żĶżļ▀Wčėż╩ż╬ż½ż¼Ęųż½żķż╩żżż╚żżż”ż│ż╚żŪż╣ĪŻżĶżżfailure detectorż╚żŽĪóżóż»ż▐żŪź╬®`ź╔ż¼ź└ź”ź¾żĘżŲżżżļż│ż╚ż“Š½Č╚┴╝ż» **═ŲČ©**żŪżŁżļż└ż▒ż╦ż╣ż«ż▐ż╗ż¾ĪŻż│ż╬å¢Ņ}żŽż╣ż┘żŲż╬Ęų╔óźĘź╣źŲźÓż╦čįż©żļż│ż╚żŪĪóĘų╔óźĘź╣źŲźÓż¼ļyżĘżż└Ēė╔ż╬Ż▒ż─żŪż╣ĪŻdownżĘż┐źßź¾źą®`ż¼īgżŽ╔·żŁżŲżżż┐ł÷║ŽĪósplit brainå¢Ņ}ż¼ż¬żŁż▐ż╣ĪŻ
- #19: downż╚┼ąČ©żĘż┐źßź¾źą®`ż¼▒ŠĄ▒ż╦═Żų╣żĘżŲżżżļż’ż▒żŪżŽż╩ż»Īó╔·żŁżŲżżż┐ł÷║Žż“┐╝ż©ż▐żĘżńż”ĪŻż│ż╬źßź¾źą®`żŽż╣żŪż╦ź»źķź╣ź┐®`ż½żķŪążĻļxżĄżņĪóū┤æBżŽ═¼Ų┌żŪżŁż╩ż»ż╩ż├żŲżżż▐ż╣ĪŻż│ż╬źßź¾źą®`ż¼ź»źķźżźóź¾ź╚ż╦╣½ķ_żĄżņżŲżĘż▐ż”ż╚Īóš`ż├ż┐Ūķł¾ż“ź»źķźżźóź¾ź╚ż╦ü╗ż©Īóż▐ż┐żĮż╬š`ż├ż┐ū┤æBż“żŌż╚ż╦źŪ®`ź┐ź┘®`ź╣ż╩ż╔ż╬╣▓ėąźĻźĮ®`ź╣ż“ēõĖ³żĘżŲżĘż▐żżż▐ż╣ĪŻż│ż╬żĶż”ż╦ź»źķź╣ź┐®`ż¼Ęų┴čżĘżŲżĘż▐ż”ż│ż╚ż“split brainå¢Ņ}ż╚żżżżż▐ż╣ĪŻ
- #20: auto-downż╬╬ŻĻōąįż“żĶż»└ĒĮŌż╣żļż┐żßż╦żŽAkka ClusterżŪźĻ®`ź└®`ż¼ż╔ż╬żĶż”ż╦øQČ©żĄżņżļż½ż“ų¬ż├żŲż¬ż»▒žę¬ż¼żóżĻż▐ż╣ĪŻż╩ż╝ż╩żķauto-downÖC─▄żŪźßź¾źą®`ż“downū┤æBż╦ż╣żļż╬żŽźĻ®`ź└®`ż└ż½żķżŪż╣ĪŻAkka Clusterż╦żŽźĻ®`ź└®`▀x│÷ż╚żżż”▀^│╠żŽ┤µį┌żĘż▐ż╗ż¾ĪŻźĻ®`ź└®`żŽgossipźūźĒź╚ź│źļżŪ═¼Ų┌żĄżņż┐źßź¾źą®`źĻź╣ź╚ż½żķøQČ©šōĄ─ż╦øQČ©żŪżŁż▐ż╣ĪŻźĻ®`ź└®`żŽunreachableżŪż╩żżźßź¾źą®`ż╬ż”ż┴Upż╚Leavingū┤æBż╬żŌż╬ż“ā׎╚Ą─ż╦▀xÆkżĘĪóźóź╔źņź╣Ēśż╦üKż┘żŲŽ╚Ņ^ż╬żŌż╬żŪż╣ĪŻ
- #21: ż│ż╬øQČ©ĘĮĘ©żŪżŽunreachableż╩źßź¾źą®`ż¼żżż╩żżł÷║ŽĪóż─ż▐żĻź┤źĘź├źūż¼ģ¦╩°żĘżŲżżżļż╚żŁż╦ź»źķź╣ź┐®`─┌żŪźĻ®`ź└®`ż“źµź╦®`ź»ż╦øQČ©żŪżŁż▐ż╣ĪŻżĘż½żĘunreachableż╩źßź¾źą®`ż¼┤µį┌ż╣żļż╚Īóźßź¾źą®`ż╦żĶż├żŲż╔ż╬źßź¾źą®`ż¼unreachableż╦ęŖż©żļż╬ż½ż¼«Éż╩żļż┐żßĪóźßź¾źą®`ż╦żĶż├żŲ«Éż╩żļźĻ®`ź└®`ż“øQČ©ż╣żļł÷║Žż¼żóżĻż▐ż╣ĪŻ└²ż©żąź═ź├ź╚ź’®`ź»ĘųČŽż╦żĶżĻź»źķź╣ź┐®`ż¼Ż▓ż─ż╦ĘųČŽżĄżņż┐ł÷║ŽĪóźĻ®`ź└®`żŽŻ▓ż─żŪżŁż▐ż╣ĪŻĖ„źĻ®`ź└®`ż¼ŽÓ╩ųé╚ż“downż╣żļż╬żŪĪósplit brainū┤æBż╦ż╩żĻż▐ż╣ĪŻAkka Clusterż╬źĻ®`ź└®`▀x│÷żŽż╔ż╬żĶż”ż╩ū┤ørżŪżŌ┐╔─▄żŪ┐╔ė├ąįż¼Ė▀żż┤·ż’żĻż╦Īóš¹║Žąįż“Āū╔³ż╦żĘżŲżżż▐ż╣ĪŻż│żņżŽš¹║Žąįż“╚Īż├żŲżżżļPaxosżõRaftż╩ż╔ż╬Ęų╔ó║ŽęŌźūźĒź╚ź│źļż╚«Éż╩żļĄŃżŪż╣ĪŻ
- #22: split brainå¢Ņ}ż╦īØäIż╣żļż┐żßż╦żŽżżż»ż─ż½ż╬ėQĄŃż¼żóżĻĪóżĮżņż╦ż╔ż╬żĶż”ż╩┤ż©ż“│÷ż╣ż½ż╦żĶż├żŲsplit brainå¢Ņ}ż“ĮŌøQż╣żļĘĮĘ©ż¼ēõż’żĻż▐ż╣ĪŻ - ź»źķź╣ź┐®`ż╬ųążŪźĻ®`ź└®`żĶżĻżŌżŌż├ż╚š¹║Žąįż╬Ė▀żżĘĮĘ©żŪøQČ©żŪżŁĪódownż“╣¹ż┐ż╗żļę█ĖŅżŽżżż╩żżżŪżĘżńż”ż½Ż┐ - ź»źķź╣ź┐®`ż¼Ż▓ż─ż╦ĘųĖŅżĄżņżļł÷║ŽĪóż╔ż┴żķż¼š²żĘżżź»źķź╣ź┐®`ż╩ż╬żŪżĘżńż”ż½Ż┐ - š²żĘż»ż╩żżź»źķź╣ź┐®`ż“øQżßż┐ż╚żĘżŲĪóżĮż╬ź»źķź╣ź┐®`ż╬źßź¾źą®`ż“ż╔ż”ż╣ż┘żŁżŪżĘżńż”ż½Ż┐
- #23: split brainå¢Ņ}ż“śöĪ®ż╩ĘĮĘ©żŪĮŌøQż╣żļsplit brain resolverż“ĮBĮķżĘż▐ż╣ĪŻīgū░żŽLightbend╔ńż╦żĶżļźūźĒźūźķźżź©ź┐źĻż╩żŌż╬ż╚Īó╦Įż¼ū„ż├ż┐ź¬®`źūź¾źĮ®`ź╣īgū░ż¼żóżĻż▐ż╣ĪŻ split brain resolverż╬ź╣ź╚źķźŲźĖż╦żŽżżż»ż─ż½żóżĻĪóż│ż╬ųąż╬Ż▓ż─ż“ĮBĮķżĘż▐ż╣ĪŻ
- #24: Keep Oldestź╣ź╚źķźŲźĖżŽĪ󟻟ķź╣ź┐®`ż¼ź═ź├ź╚ź’®`ź»ĘųČŽż“Ųż│żĘż┐ż╚żŁż╦ĪóūŅ╣┼ż╬źßź¾źą®`ż¼żżżļé╚ż“š²ż╬ź»źķź╣ź┐®`ż╚żĘż▐ż╣ĪŻżĮż”żŪż╩żżé╚ż╬źßź¾źą®`żŽūįżķźĘźŃź├ź╚ź└ź”ź¾żĘż▐ż╣ĪŻunreachableż╩źßź¾źą®`ż“downż╣żļę█ĖŅżŽūŅ╣┼źßź¾źą®`ż¼ĄŻżżż▐ż╣ĪŻ ūŅ╣┼źßź¾źą®`ż¼ż╔ż╬żĶż”ż╦øQż▐żļż╬ż½ż“ĮŌšhżĘż▐ż╣ĪŻź»źķź╣ź┐®`ż╬źßź¾źą®`żŽŲäėżĘż┐ż╚żŁż╬ź┐źżźÓź╣ź┐ź¾źūż“│ųż├żŲżżż▐ż╣ĪŻū┤æBż¼RemovedżŪż╩żżźßź¾źą®`ż╬ųążŪż│ż╬ź┐źżźÓź╣ź┐ź¾źūż¼ūŅąĪż╬źßź¾źą®`ż¼ūŅ╣┼źßź¾źą®`żŪż╣ĪŻźĻ®`ź└®`ż╚żŽ«Éż╩żĻĪóūŅ╣┼źßź¾źą®`żŽż┐ż╚ż©gossipż¼ģ¦╩°żĘżŲżżż╩ż»żŲżŌż╣ż┘żŲż╬źßź¾źą®`żŪę╗ęŌż╦øQż▐żĻż▐ż╣ĪŻ Keep Oldestź╣ź╚źķźŲźĖżŽ┐╔ė├ąįż╬ĄŃżŪå¢Ņ}ż¼żóżĻż▐ż╣ĪŻūŅ╣┼źßź¾źą®`ż¼ź»źķź├źĘźÕżĘż┐ł÷║ŽĪó╚½ź»źķź╣ź┐®`źßź¾źą®`ż¼źĘźŃź├ź╚ź└ź”ź¾żĘż▐ż╣ĪŻż│żņż“Ę└ż░ż┐żßż╦żŽĪó`down-if-alone`ź¬źūźĘźńź¾ż“ėąä┐ż╦żĘż▐ż╣ĪŻż│żņż╦żĶżĻūŅ╣┼źßź¾źą®`ż╬ż▀ż¼ź»źķź├źĘźÕżĘż┐ł÷║ŽĪó┤·ż’żĻż╦ūŅ╣┼źßź¾źą®`ż¼downżĄżņż▐ż╣ĪŻ
- #25: ūŅ╣┼źßź¾źą®`ż╬øQČ©żŽunreachableż╩źßź¾źą®`ż╦ę└┤µżĘż╩żżż╬żŪĘųČŽżĄżņżŲżżżŲżŌ╚½źßź¾źą®`żŪę╗ęŌż╦øQż▐żĻż▐ż╣ĪŻūŅ╣┼źßź¾źą®`ż“╗∙£╩ż╦ż╣żļŽ▐żĻsplit brainżŽż█ż▄ż¬żŁż▐ż╗ż¾ĪŻ
- #26: Static Quorumź╣ź╚źķźŲźĖżŽź═ź├ź╚ź’®`ź»ĘųČŽż╬żĄżż▓ą┤µźßź¾źą®`ż¼quorum sizeż╦£║ż┐ż╩żżł÷║ŽĪóżĮż╬źßź¾źą®`ż“downżĘż▐ż╣ĪŻźßź¾źą®`╩²ż¼Ż╣żŪquorum sizeż¼ŻĄż╬ł÷║Žż╦ŻĄŻ║Ż┤ż╦ĘųČŽżĘż┐ł÷║ŽĪóŻĄż╬é╚ż¼╔·żŁ▓ążĻŻ┤ż╬é╚żŽdownżĘż▐ż╣ĪŻ ╦¹ż╬źßź¾źą®`ż“downż╣żļę█ĖŅżŽźĻ®`ź└®`ż¼ĄŻżżż▐ż╣ĪŻquorum-size * 2 - 1ż“│¼ż©żļźßź¾źą®`ż“ūĘ╝ėżĘż╩żżŽ▐żĻsplit brainżŽż¬żŁż▐ż╗ż¾ĪŻStatic Quorumż╬┐╔ė├ąįżŽŠtź╬®`ź╔╩²ż╚quorum sizeżŪš{╣Ø┐╔─▄żŪż╣ĪŻStatic QuorumżŽźßź¾źą®`ż╬╩²ż“╣╠Č©żĘż╩ż▒żņżąż╩żķż╩żżĄŃż¼╚§ĄŃżŪż╣ż¼Īó╠žČ©ż╬źĒ®`źļż╦╣╠Č©ż╣żļż│ż╚żŪĪó╦¹ż╬źĒ®`źļżŽź└źżź╩ź▀ź├ź»ż╦źßź¾źą®`╩²ż“ēõż©żļż│ż╚ż¼żŪżŁżļż╬żŪĪóż│ż╬įOČ©ż“ż¬ä߿߿ʿ▐ż╣ĪŻ
- #27: ĘųČŽżĄżņż┐ł÷║ŽleaderżŽŻ▓ż─żŪżŁżļĄŃżŽēõż’żķż╩żżż╬żŪż╣ż¼Īó▓ą┤µź╬®`ź╔ż¼quorum sizeż“£║ż┐żĘżŲżżżļżŌż╬żŽŲ¼ĘĮż└ż▒żŪż╣ĪŻ
- #28: ▓ą─Ņż╩ż¼żķ═ĻĶĄż╩split brain resolverż╬ź╣ź╚źķźŲźĖżŽżóżĻż▐ż╗ż¾ĪŻFLPż╚żĘżŲų¬żķżņżļėą├¹ż╩蹊┐ż╬ĮY╣¹żŪżŽĪóĘŪ═¼Ų┌ż╩źĘź╣źŲźÓż╦ż¬żżżŲżŽĪóż┐ż└Ż▒ż─ż╬źūźĒź╗ź╣ż¼╣╩šŽżĘż┐ż└ż▒żŪżŌĪóĘų╔óźóźļź┤źĻź║źÓż╦żĶżļ║ŽęŌżŽżŪżŁż╩żżż╚ĮYšōĖČż▒żŲżżż▐ż╣ĪŻ split brain resolverż╬Ė„ź╣ź╚źķźŲźĖżŽĪó║ŽęŌżŪżŁż╩żżź▒®`ź╣ż¼¼Fīgż╬źĘź╣źŲźÓżŪżŽż┤ż»ŽĪż╩└²═Ōż╦ż╩ż├żŲż¬żĻĪó¼FīgĄ─ż╩ĮŌĘ©ż╚żżż©ż▐ż╣ĪŻ
- #30: ź¬ź▀ź├źĘźńź¾╣╩šŽż╚żŽĪóźūźĒź╗ź╣ż¼╦═żļż┘żŁźßź├ź╗®`źĖż“╦═żķż╩żżĪóżóżļżżżŽ╩▄ą┼ż╣żļż┘żŁźßź├ź╗®`źĖż“╩▄ą┼żŪżŁż╩żż╣╩šŽżŪż╣ĪŻźūźĒź╗ź╣ż¼ź»źķź├źĘźÕżĘż┐│Ī║ŽżŌ╦═żļż┘żŁźßź├ź╗®`źĖż“╦═żņż╩żżż╬żŪĪ󟬟▀ź├źĘźńź¾╣╩šŽżŽź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż╬żĶżĻę╗░ŃĄ─ż╩│Ī║Žż╚╝¹żļż│ż╚ż¼żŪżŁż▐ż╣ĪŻ
- #31: Akka ClusterżŪżŽĪó╦═żļż┘żŁżŽż║ż╬źĘź╣źŲźÓźßź├ź╗®`źĖż“╦═ą┼żŪżŁż║ĪóźĒ®`ź½źļż╚źĻźŌ®`ź╚ż╬źóź»ź┐®`źĘź╣źŲźÓķgż╬ū┤æBż¼═¼Ų┌żŪżŁż╩ż»ż╩ż├ż┐ż╚żŁż╦ź¬ź▀ź├źĘźńź¾╣╩šŽż╚ż╩żĻż▐ż╣ĪŻźĘź╣źŲźÓźßź├ź╗®`źĖżŽźµ®`źČ®`źßź├ź╗®`źĖż╚żŽ«Éż╩żĻĪóexactly-once╦═ą┼▒Żį^żŪīgū░żĄżņżŲżżż▐ż╣ĪŻŠ▀╠ÕĄ─ż╦źĘź╣źŲźÓźßź├ź╗®`źĖż╚żŽĪóźĻźŌ®`ź╚ź╣®`źč®`źąźżźČ®`ż╦╣▄└ĒżĄżņż┐źóź»ź┐®`ż╬źķźżźšźĄźżź»źļźżź┘ź¾ź╚Īówatchż╦żĶżļ╦└╗Ņ▒OęĢĪóźĻźŌ®`ź╚źóź»ź┐®`ż╬źŪźūźĒźżźßź¾ź╚ż¼įōĄ▒żĘż▐ż╣ĪŻż│żņżķż╬╦═ą┼ż¼┤_šJżŪżŁż╩żżż╚żŁż╦Akka Remoteż╬ū┤æBżŽquarantinedż╦ż╩żĻż▐ż╣ĪŻquarantinedż╦ż╩żļż╚ĪóżĮż╬źßź¾źą®`żŽunreachableż½żķæ°ż├żŲż│żņż╩ż»ż╩żĻż▐ż╣ĪŻĮŌŽ¹ż╣żļż╦żŽź»źķź╣ź┐®`ż½żķ╚ĪżĻ│²ż»ż½źóź»ź┐®`źĘź╣źŲźÓż“į┘Ųäėż╣żļ▒žę¬ż¼żóżĻż▐ż╣ĪŻauto-downżõsplit brain resolverż“╩╣ė├żĘżŲżżżļł÷║ŽĪóunreachableż╩źßź¾źą®`ż“ź»źķź╣ź┐®`ż½żķ╚ĪżĻ│²ż»ū„śIżŽūįäėżŪąąż’żņĪó╚ĪżĻ│²ż½żņż┐źßź¾źą®`żŽźóź»ź┐®`źĘź╣źŲźÓż“źĘźŃź├ź╚ź└ź”ź¾żĘż▐ż╣ĪŻż─ż▐żĻż│ż╬ł÷║ŽAkka Clusterż╦ż¬żżżŲź¬ź▀ź├źĘźńź¾╣╩šŽżŽź»źķź├źĘźÕź╣ź╚ź├źū╣╩šŽż╚╚½ż»═¼żĖÆQżżż╦ż╩żĻż▐ż╣ĪŻ
- #33: ź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽżŽźūźĒź╗ź╣ż¼ź»źķź├źĘźÕżĘż┐ż└ż▒żŪż╩ż»ĪóżĮż│ż½żķźĻź½źąźĻ®`żŪżŁż╩żżĪóżóżļżżżŽź»źķź├źĘźÕż╚į┘ŲČ»ż“└RżĻĘĄżĘżŲżĘż▐ż”╣╩šŽżŪż╣ĪŻźĻź½źąźĻ®`żŪżŁż╩żż│Ī║ŽĪó╦═żļż┘żŁżŽż║ż╬źßź├ź╗®`źĖż“╦═żņż╩żżż╬żŪĪ󟬟▀ź├źĘźńź¾╣╩šŽż╚╝¹żļż│ż╚żŌżŪżŁż▐ż╣ĪŻ
- #34: Akka Clusterż╬źņźżźõ®`żŪżŽź»źķź├źĘźÕżĘżŲź»źķź╣ź┐®`ż½żķ╚ĪżĻ│²ż½żņż┐ź╬®`ź╔ż¼į┘ŲäėżĘżŲź»źķź╣ź┐®`ż╦į┘╝ė╚ļż╣żļż│ż╚ż“Ū░╠ßż╚żĘżŲżżż▐ż╗ż¾ĪŻż╩ż╬żŪź»źķź├źĘźÕżĘż┐ż▐ż▐żŪżŌå¢Ņ}żŽż╩ż»Ī󟻟ķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽżŽż¬żŁż▐ż╗ż¾ĪŻ
- #35: Akka Clusterż¼į┘ŲäėżĘż┐ź╬®`ź╔ż“ż╔ż╬żĶż”ż╦ÆQż”ż½ż“ĮŌšhżĘż▐ż╣ĪŻAkka ClusterżŽźßź¾źą®`ż“Ż│ż─ż╬ūRäeūėż╬ź┐źūźļżŪšJūRżĘż▐ż╣ĪŻhostname:port:uidżŪż╣ĪŻuidżŽźóź»ź┐®`źĘź╣źŲźÓŲäėĢrż╦░kąążĄżņżļźµź╦®`ź»ż╩IDżŪż╣ĪŻż│ż╬uidż╦żĶż├żŲż┐ż╚ż©ź█ź╣ź╚ż╚ź▌®`ź╚ż¼═¼żĖżŪżŌĪóį┘ŲäėżĘż┐ßßżŪżŽuidż¼«Éż╩żĻż▐ż╣ĪŻż─ż▐żĻį┘ŲäėżĘżŲź»źķź╣ź┐®`ż╦į┘╝ė╚ļż╣żļż│ż╚żŽĪóą┬żĘżżźßź¾źą®`ż¼ź»źķź╣ź┐®`ż╦╝ė╚ļż╣żļż│ż╚ż╚╚½ż»═¼żĖżŪż╣ĪŻż│ż”ż╣żļż│ż╚ż╦żĶż├żŲAkka ClusterżŽź»źķź├źĘźÕ?źĻź½źąźĻ®`╣╩šŽż“┐╝æ]ż╣żļ▒žę¬ż¼ż╩ż»Īóģg╝ā╗»żĘżŲżżż▐ż╣ĪŻ
- #36: ź╬®`ź╔ż¼ź»źķź├źĘźÕżĘż┐ßßį┘ŲäėżĘżŲź»źķź╣ź┐®`ż╦╝ė╚ļż╣żļļHĪ󟻟ķź├źĘźÕżĘż┐źßź¾źą®`żŽunreachableż╚ż╩ż├żŲźĻ®`ź└®`źóź»źĘźńź¾ż¼ż╚żņż╩żżż┐żßĪóź╬®`ź╔ż¼į┘╝ė╚ļżŪżŁżļż╬ż½ę╔å¢ż¼▓ążĻż▐ż╣ĪŻż│ż╬żĶż”ż╩╠KżĻ(incarnation)ź╬®`ź╔ż╬ÆQżżż╦ż─żżżŲĮŌšhżĘż▐ż╣ĪŻź»źķź╣ź┐®`ż╬źßź¾źą®`ż╚═¼żĖź█ź╣ź╚Ż║ź▌®`ź╚ż╬ź┌źóż“żŌż─źßź¾źą®`ż¼╝ė╚ļżĘżŲżŁż┐ł÷║ŽĪóLeaderżŽ╣┼żżźßź¾źą®`ż“ūįäėĄ─ż╦downżĘż▐ż╣ĪŻż│żņżŽauto-downżõsplit brain resolverż“╩╣ż’ż╩ż»żŲżŌąąż’żņż▐ż╣ĪŻż│żņż╦żĶż├żŲį┘ŲäėżĘż┐ź╬®`ź╔żŽź»źķź╣ź┐®`ż╦▓╬╝ėż╣żļż│ż╚ż¼żŪżŁż▐ż╣ĪŻż╩ż╝ż│ż╬ź▒®`ź╣żŪdownż¼░▓╚½ż╦┐╔─▄ż½ż╚żżż”ż╚Īó═¼żĖź█ź╣ź╚Ż║ź▌®`ź╚ż╬ź┌źóż“żŌż─źßź¾źą®`ż¼═¼Ģrż╦Ż▓ż─┤µį┌ż╣żļż│ż╚żŽżóżĻż©ż╩żżż½żķżŪż╣ĪŻ╣┼żżźßź¾źą®`żŽź»źķź├źĘźÕżĘż┐ż╚żżż”ż│ż╚ż“LeaderżŽ┤_īgż╦┼ąČŽżŪżŁż▐ż╣ĪŻż│ż╬żĶż”ż╩╠žÅšż¼żóżļż╬żŪĪó╗∙▒ŠĄ─ż╦źūźĒź╗ź╣ż“į┘Ųäėż╣żļż│ż╚ż“äßżßż▐ż╣ĪŻżĮż”ż╣żņżąź»źķź├źĘźÕżĘżŲżŌź»źķź╣ź┐®`ż¼┐sąĪż╣żļż│ż╚żŽż╩ż»ĪóūįäėĄ─ż╦żŌż╚ż╬┤¾żŁżĄż╦æ°żĻż▐ż╣ĪŻ
- #37: č}╩²ż╬DCż╦Akka Clusterż“źŪźūźĒźżżĘżŲżżżļł÷║ŽĪóį┘Ųäėż╦żŽūóęŌż¼▒žę¬żŪż╣ĪŻŻ▓ż─ż╬AZķgżŪź═ź├ź╚ź’®`ź»ĘųČŽż“Ųż│żĘż┐ł÷║ŽĪósplit brain resolverż╦żĶż├żŲŲ¼ĘĮż╬AZż╬źßź¾źą®`ż╬ż▀ż¼╔·żŁ▓ążĻż▐ż╣Ż©AZ2ż╚żĘż▐ż╣Ż®ĪŻūįżķ╦└ż“▀xż¾ż└żŌż”ę╗ĘĮż╬AZŻ©AZ1ż╚żĘż▐ż╣Ż®ż╬źßź¾źą®`żŽį┘ŲäėżĘż┐ßßĪóż│ż╬ćĒż╬żĶż”ż╦joiningū┤æBżŪź═ź├ź╚ź’®`ź»ĘųČŽż¼ĮŌŽ¹żĄżņżļż▐żŪ┤²ż┴ŠAż▒Īóź═ź├ź╚ź’®`ź»ĘųČŽż¼ĮŌŽ¹żĄżņż┐żķį┘żėź»źķź╣ź┐®`ż╦æ°żļż│ż╚ż¼└ĒŽļżŪż╣ĪŻż│ż╬ż╚żŁź»źķź╣ź┐®`ż╦╝ė╚ļż╣żļż┐żßż╬Ą┌ę╗seedź╬®`ź╔żŽĪó╔·żŁ▓ąż├ż┐ĘĮż╬AZ2ż╦┤µį┌żĘż╩ż▒żņżąż╩żĻż▐ż╗ż¾ĪŻĄ┌ę╗seedź╬®`ź╔ż╚żŽź»źķź╣ź┐®`ż“Ż░ż½żķśŗ║Bż╣żļļHż╬ŲĄŃż╦ż╩żļź╬®`ź╔ż╬ż│ż╚żŪĪóįOČ©ż╦ėø╩÷żĘż▐ż╣ĪŻ
- #38: ż│żņż¼ź»źķź╣ź┐®`ż╦╝ė╚ļż╣żļż┐żßż╬Ą┌ę╗seedź╬®`ź╔ż“ĪóAZ1ż╦įOČ©żĘżŲżĘż▐ż├ż┐ł÷║ŽżŪż╣ĪŻį┘ŲäėżĘż┐AZ1ż╬ź╬®`ź╔ż┐ż┴żŽĪóżĮżņżķż└ż▒żŪź»źķź╣ź┐®`ż“ū„ż├żŲżĘż▐żżĪósplit brainū┤æBż╦ż╩ż├żŲżĘż▐żżż▐ż╣ĪŻĄ┌ę╗seedź╬®`ź╔żŽź»źķź╣ź┐®`ż“Ż░ż½żķśŗ║Bż╣żļļHż╬ŲĄŃż╦ż╩żļż╬żŪĪósplit brain resolverżŪ▓ąż╣┼ąČŽż╬╗∙£╩ż╦ż╩żļź╬®`ź╔╚║Ż©ż│ż╬ł÷║Žquorum sizeż╬Ż│ż“£║ż┐ż╗żļé╚ż╬AZ2Ż®ż¼żóżļAZż╦ų├ż»▒žę¬ż¼żóżĻż▐ż╣ĪŻźūźĒź╗ź╣ż╬į┘Ųäėż“ėąä┐ż╦żĘżŲč}╩²ż╬AZżŪ└¹ė├ż╣żļļHżŽĪóż╔ż╬AZż“ź»źķź╣ź┐®`ż╬š²ż╚ż╣żļż½øQżßĪóżĮżņż“╣╠Č©ż╣żļż│ż╚ż“ż¬ä߿߿ʿ▐ż╣ĪŻ