Algoritma Kendali Otomatis untuk Differential-Steered Wheeled Robot
ŌĆó
0 likesŌĆó142 views

Algoritma kendali otomatis untuk robot beroda diferensial membahas model kinematika dan dinamika robot, desain kontroler berbasis analisis kestabilan Lyapunov, serta algoritma pengendalian untuk melacak target."



























Algoritma Kendali Otomatis untuk Differential-Steered Wheeled Robot
- 1. Algoritma Kendali Otomatis untuk Differential-Steered Wheeled Robot By: Anugrah K. Pamosoaji, Ph.D. Fakultas Teknologi Industri Universitas Atma Jaya Yogyakarta 2022 13 Maret 2022
- 2. Agenda ŌĆó Pengertian differential-steered robots ŌĆó Konsep pengendalian otomatis (feedback control systems) ŌĆó Pemodelan kinematika robot ŌĆó Konsep kestabilan ŌĆó Desain pengendali dengan pendekatan analisis kestabilan Lyapunov ŌĆó Algoritma pengendalian 1/26
- 3. Differential-Steered Robots ŌĆó Mobile robot / wheeled robot: robot yang mekanisme bergeraknya menggunakan roda. ŌĆó Beberapa jenis wheeled robot: differential-steered robot, unicycle robot, bicycle- like robot, ackermann-steered robot. ŌĆó Differential-steered robot adalah mobile robot yang mekanisme bergeraknya menggunakan kombinasi kecepatan putar roda kiri dan roda kanan. 2/26
- 4. Pemodelan Robot ŌĆó Dalam perancangan robot, sebelum kita melakukan prototyping, terlebih dahulu kita harus melakukan simulasi untuk memperkirakan bagaimana kinerja dari sistem yang akan kita rancang. ŌĆó Agar simulasi tersebut dapat menggambarkan situasi yang (mendekati) sebenarnya, kita perlu membuat model matematik. ŌĆó Model matematik adalah sebuah penggambaran secara matematik yang merepresentasikan karakteristik sebuah sistem. ŌĆó Model pada mobile robot (dan robot pada umumnya) biasanya terbagi ke dalam dua kategori: ŌĆó Model kinematika ( hanya memodelkan jarak, kecepatan, percepatan ) ŌĆó Model dinamika (memodelkan jarak, kecepatan, percepatan, gaya, torsi). 3/26
- 5. Open loop control Actuators Mikrokontroler ŌĆó Open loop control system adalah sistem pengendalian di mana controller hanya mendapatkan informasi set point (desired output) dan informasi awal berupa actual output awal pada saat sistem mulai dijalankan. ŌĆó Set point = desired output = output yang diinginkan. ŌĆó Output process = actual output = output yang sebenarnya. ŌĆó Kelemahan mendasar open loop control adalah setelah sistem (robot) mulai dijalankan, controller tidak mengetahui actual outputnya, sehingga sinyal instruksi yang diberikan ke actuator hanya berdasarkan asumsi actual output (yang didapat dari perkalian kecepatan dan waktu) ŌĆó Padahal, pada kenyataannya, perhitungan kecepatan x waktu belum tentu sama dengan actual outputnya. (ada faktor pengganggu, seperti skidding forces (menyebabkan selip pada roda). 4/26
- 6. Feedback control system (close loop) ŌĆó Feedback control system adalah sistem kendali loop-tertutup, di mana instruksi pengendalian ke actuator didasarkan pada selisih antara set point (desired output) dan actual output. ŌĆó Set point = desired output = output yang diinginkan. ŌĆó Output process = actual output = output yang sebenarnya. ŌĆó Error = set point ŌĆō actual output. ŌĆó Pada prinsipnya, sistem mikrokontroler akan memberikan instruksi ke motor-motor pada setiap roda selama Error masih belum NOL. Autonomous Forklift <Widyotriatmo, Pamosoaji, and Hong (2013)> 5/26
- 7. Fungsi transfer (transfer function) ŌĆó Fungsi transfer adalah rasio output/input. ŌĆó Fungsi transfer merupakan sebuah spesifikasi sub-sistem dalam sebuah sistem kompleks yang dapat digunakan untuk pemodelan matematika sistem kompleks tersebut. ŌĆó Pada wheeled robot, setiap roda terhubung dengan motor dan gear. ŌĆó Untuk motor, fungsi transfernya adalah: TF_motor = rpm_m / Vm Di mana: rpm_m = kecepatan putaran sumbu keluaran motor. Vm = tegangan input ke motor ŌĆó Untuk gear, fungsi transfernya adalah: TF_gear = rpm_w / rpm_m Di mana: rpm_w = kecepatan putaran sumbu keluaran gear. TF_total = TF_motor x TF_gear = rpm_m / V_m x rpm_w / rpm_m = rpm_w / V_m 6/26
- 8. Fungsi transfer pada wheeled robot ŌĆó Setiap blok pada sistem closed loop memiliki transfer function yang statis. ŌĆó Setiap blok pada sistem closed loop memiliki transfer function yang konstan. Contohnya pada motor DC di bawah ini: ŌĆó Tetapi fungsi transfer pada process (wheeled robot secara menyeluruh), transfer functionnya tidak dinyatakan dengan rasio output/input, tetapi dengan persamaan differensial orde 1ŌĆ”. (slide berikutnya). 7/26
- 9. Model Kinematika Unirobot (robot 1 roda) ŌĆó Fungsi transfer pada differential-steered robot dapat direpresentasikan dengan model kinematika atau model dinamika (Dalam webinar ini yang dibahas hanyalah model kinematika saja). ŌĆó Model kinematika differential-steered robot: Øæź╠ć = ØææØæź ØææØæĪ = ØæŻ. cos Ø£ā Øæ”╠ć = ØææØæ” ØææØæĪ = ØæŻ. sin Ø£ā Ø£ā╠ć = ØææØ£ā ØææØæĪ = Žē Øæź ØæĪ + ╬öØæĪ = Øæź ØæĪ + ØæŻ ØæĪ . cos Ø£ā ØæĪ . ╬öØæĪ Ø£ā ØæĪ + ╬öØæĪ = Ø£ā ØæĪ + Žē . ╬öØæĪ Øæ” ØæĪ + ╬öØæĪ = Øæ” ØæĪ + ØæŻ ØæĪ . sin Ø£ā ØæĪ . ╬öØæĪ Simulasi model kinematika differential-steered robot: ØæŻ : kecepatan linear / kecepatan traksi (m/sec) Žē: kecepatan sudut (rad/sec) Control variables 8/26
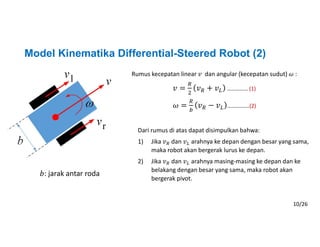
- 10. Model Kinematika Differential-Steered Robot (2) : jarak antar roda Rumus kecepatan linear ØæŻ dan angular (kecepatan sudut) Ø£ö : ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ” (1) ŌĆ”ŌĆ”.ŌĆ”ŌĆ”ŌĆ”(2) Dari rumus di atas dapat disimpulkan bahwa: 1) Jika ØæŻ dan ØæŻ arahnya ke depan dengan besar yang sama, maka robot akan bergerak lurus ke depan. 2) Jika ØæŻ dan ØæŻ arahnya masing-masing ke depan dan ke belakang dengan besar yang sama, maka robot akan bergerak pivot. 10/26
- 11. Navigasi robot: tracking (Huang, 2009) Persamaan kinematika robot: Variabel navigasi (error konfigurasi): (3) Kinematika variable navigasi: Øø╝ ØøĮ Ø£ī ØæŻ Ø£ö Contoh misi robot: target tracking. Pada misi ini, robot bergerak sedemikian rupa sehingga konfigurasinya (Øæź, Øæ”,Ø£Ö) harus sama dengan konfigurasi target
- 12. Desain controller (control law) untuk misi target tracking Problem: apakah rumus untuk input ØæŻ dan w supaya r, a, dan b bernilai nol? Rumusan untuk ØæŻ dan w disebut juga ŌĆ£Control LawŌĆØ. Øø╝ ØøĮ Ø£ī ØæŻ Ø£ö Banyak metode yang dapat digunakan untuk mendesain Control Law. Pada webinar ini kita akan perdalam desain Control Law dengan menggunakan analisis kestabilan Lyapunov dan BarbalatŌĆÖs Lemma. 12/26
- 13. Apakah kestabilan itu? ŌĆó Untuk mempermudah pengertian, kita gunakan contoh untuk sistem 1 dimensi dengan state variabelnya adalah r. ŌĆó Nilai state variabel r dikatakan stabil jika nilainya dan nilai turunan ke-n terhadap waktu (dr/dt, menuju ke nol untuk t menuju tak-hingga. 13/26 time r dr/dt time 0 0
- 14. Teori kestabilan Lyapunov ŌĆó Mari kita lihat model kinematika wheeled robot berikut ini: dengan Øæ×╠ć = Øæō(Øæ×) ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”. (4) Øæ× = Ø£ī Øø╝ ØøĮ dan Øæō(Øæ×)= ØæŻ cosØøĮ ŌłÆ ØæŻcosØø╝ ØæŻ ŌłÆ ØæŻ ŌłÆ Ø£ö ØæŻ ŌłÆ ØæŻ ŌłÆ Ø£Ö╠ć ŌĆó Sistem dikatakan stabil jika dan hanya jika lim ŌåÆ Øæ× ØæĪ = 0 ŌĆó Teori kestabilan Lyapunov mengatakan bahwa jika terdapat sebuah fungsi Øæē(Øæ×) pada sistem pada persamaan (4) yang memiliki karakteristik berikut ini: ŌĆó Nilainya selalu positif kecuali ketika Øæ×=0 (= positive definite) ŌĆó Turunan pertamanya terhadap waktu (dV/dt) selalu non-positive (=negative semi-definite) Maka titik equilibrium (titik origin pada state- space) nya stabil. 14/26
- 15. BarbalatŌĆÖs Lemma ŌĆó BarbalatŌĆÖs Lemma mengatakan bahwa yaitu jika terdapat sebuah fungsi Øæē(Øæ×(ØæĪ)) bernilai antara [0, Ōł×) dan Ōł½ Øæē(Øæ×(ØæĪ)) ØææØæĪ ada dan terbatas (tidak tak-hingga), maka Øæ×(ØæĪ) ’āĀ0 seiring bertambahnya waktu (ØæĪ ŌåÆ Ōł×). ŌĆó Catatan: Øæē(Øæ×(ØæĪ)) bernilai antara [0, Ōł×) disebut positive definite jika nilai 0 terjadi hanya ketika Øæ×(ØæĪ)=0. ŌĆó Mari kita lihat model kinematika wheeled robot berikut ini: dengan Øæ×╠ć = Øæō(Øæ×) ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”. (4) Øæ× = Ø£ī Øø╝ ØøĮ dan Øæō(Øæ×)= ØæŻ cosØøĮ ŌłÆ ØæŻcosØø╝ ØæŻ ŌłÆ ØæŻ ŌłÆ Ø£ö ØæŻ ŌłÆ ØæŻ ŌłÆ Ø£Ö╠ć 15/26
- 16. Analisis kestabilan (1) ŌĆó Untuk menganalisis kestabilan, kita menggunakan analisis kestabilan Lyapunov ŌĆó Langkah 1: carilah sebuah Lyapunov candidate function yang ŌĆ£positive definiteŌĆØ (selalu bernilai positif kecuali ketika semua variabel state bernilai nol). ŌĆó Huang (2009) memilih sebuah Lyapunov candidate function sbb: dengan dan ŌĆó Langkah 2: Turunkan Øæē dan Øæē terhadap waktu adalah sebagai berikut: Øæē╠ć = Ø£Ģ 1 2 Ø£ī Ø£ĢØ£ī . ØææØ£ī ØææØæĪ = Ø£īØ£ī╠ć = Ø£ī ØæŻ cosØøĮ ŌłÆ ØæŻcosØø╝ Øæē╠ć = Øø╝Øø╝╠ć + ØøĮØøĮ╠ć = Øø╝ ØæŻ sinØø╝ Ø£ī ŌłÆ ØæŻ sinØøĮ Ø£ī ŌłÆ Ø£ö + ØøĮ ØæŻ sinØø╝ Ø£ī ŌłÆ ØæŻ sinØøĮ Ø£ī ŌłÆ Ø£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻsinØø╝ ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć 16/26
- 17. Memilih formula untuk kecepatan ØæŻ : ŌĆó Kita sudah punya turunan pertama terhadap waktu: Kecepatan v perlu dibuat formulanya agar selalu bernilai positif ketika Ø£ī ŌēĀ 0 dan Øæē╠ć < 0 ketika Ø£ī ŌēĀ 0 . (Sebenarnya kita bebas menentukan formulanya, asal kedua syarat di atas terpenuhi). Huang (2009) memilih formula berikut ini: , dengan Ø£å > 0. NB: Ø£å adalah konstanta positif (bebas memilih nilainya). Mari kita substitusikan v di atas ke Øæē╠ć : Karena , maka Analisis kestabilan (2) Øæē ØæŻ = ØæŻ cosØøĮ + Ø£å Ø£ī cosØø╝ Øæē╠ć = Ø£ī ØæŻ cosØøĮ ŌłÆ ØæŻcosØø╝ Øæē╠ć = Ø£ī ØæŻ cosØøĮ ŌłÆ ØæŻ cosØøĮ + Ø£å Ø£ī cos Øø╝ Øæē╠ć = Ø£ī ØæŻ cosØøĮ 1 ŌłÆ cos Øø╝ ŌłÆ Ø£å Ø£īcos Øø╝ Øæē╠ć = Ø£īØæŻ cosØøĮsin Øø╝ ŌłÆ Ø£å Ø£ī cos Øø╝ Øæē╠ć = Ø£īØ£ī╠ć Ø£ī╠ć = ØæŻ cosØøĮsin Øø╝ ŌłÆ Ø£å Ø£īcos Øø╝ Ø£īØ£ī╠ć = Ø£īØæŻ cosØøĮsin Øø╝ ŌłÆ Ø£å Ø£ī cos Øø╝ 17/26
- 18. Analisis kestabilan (3) ŌĆó Ada masalah pada !!!! ŌĆó Perhatikan bahwa bagian ŌłÆØ£å Ø£īcos Øø╝ memiliki kontribusi untuk menurunkan nilai Ø£ī, karena nilainya pasti negatif. Tetapi bagian ØæŻ cosØøĮsin Øø╝ dapat bernilai positif atau negatif. Dengan demikian, tanda Ø£ī╠ć dapat bernilai positif dan negatif. Artinya, jarak antara robot dan targetnya bisa saja bertambah atau berkurang. ŌĆó Padahal ’āĀ tujuan kita mendesain pengendali adalah untuk membuat jarak antara robot dan targetnya semakin lama semakin pendek, dan pada satu waktu akan nol. ŌĆó Oleh karena itu, kita perlu mendesain input berikutnya, yaitu Ø£ö. Ø£ī╠ć Ø£ī╠ć = ØæŻ cosØøĮsin Øø╝ ŌłÆ Ø£å Ø£īcos Øø╝ 18/26
- 19. Analisis kestabilan (4) Mencari rumusan untuk Ø£ö. ŌĆó Kembali kita lihat rumusan untuk Øæē╠ć : ŌĆó Dan kita lihat rumusan untuk kecepatan linear ØæŻ : ŌĆó Substitusi persamaan ØæŻ ke Øæē╠ć : ŌĆó Karena sinØø╝cosØø╝ = , maka: Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻsinØø╝ ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć ØæŻ = ØæŻ cosØøĮ + Ø£å Ø£ī cosØø╝ Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻ cosØøĮ + Ø£å Ø£ī cosØø╝ sinØø╝ ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻ cosØøĮ + Ø£å Ø£ī sinØø╝cosØø╝ ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻ cosØøĮ + Ø£å Ø£ī sin2Øø╝ 2 ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć 19/26 AKPSMP1
- 20. ║▌║▌▀Ż 19 AKPSMP1 Anugrah Kusumo Pamosoaji, ST., MT., Ph.D.cand; 13/03/2022
- 21. Analisis kestabilan (5) Mencari rumusan untuk Ø£ö (lanjutan) Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻ cosØøĮ + Ø£å Ø£ī sin2Øø╝ 2 ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻ sin2Øø╝ 2 cosØøĮ + Ø£å Ø£ī sin2Øø╝ 2 ŌłÆ ØæŻ sinØøĮ ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī ØæŻ sin2Øø╝ 2 cosØøĮ ŌłÆ ØæŻ sinØøĮ + Ø£å Ø£ī sin2Øø╝ 2 ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2 cosØøĮ ŌłÆ sinØøĮ ØæŻ + Ø£å Ø£ī Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2 ŌłÆ Øø╝Ø£ö ŌłÆ ØøĮØ£Ö╠ć Øæē╠ć = Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2 cosØøĮ ŌłÆ sinØøĮ ØæŻ ŌłÆ ØøĮØ£Ö╠ć + sin2Øø╝ 2 Øø╝ + ØøĮ Ø£å ŌłÆ Øø╝Ø£ö 20/26
- 22. Analisis kestabilan (6) ŌĆó Sekarang kita sudah punya persamaan untuk Øæē╠ć . ŌĆó Selanjutnya adalah merancang Ø£ö sehingga Øæē╠ć akan selalu bernilai negatif dan nol ketika Øø╝ dan ØøĮ bernilai nol. ŌĆó Langkah-langkahnya adalah sebagai berikut: ŌĆó Set Øæē╠ć = ŌłÆØ£å Øø╝ , di mana Ø£å > 0 adalah parameter konstan. ŌĆó Masukkan Øæē╠ć = ŌłÆØ£å Øø╝ ke dalam persamaan Øæē╠ć sebelumnya: ŌłÆØ£å Øø╝ = Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2 cosØøĮ ŌłÆ sinØøĮ ØæŻ ŌłÆ ØøĮØ£Ö╠ć + sin2Øø╝ 2 Øø╝ + ØøĮ Ø£å ŌłÆ Øø╝Ø£ö Øø╝Ø£ö = Ø£å Øø╝ + Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2 cosØøĮ ŌłÆ sinØøĮ ØæŻ ŌłÆ ØøĮØ£Ö╠ć + sin2Øø╝ 2 Øø╝ + ØøĮ Ø£å Ø£ö = Ø£å Øø╝ + Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2Øø╝ cosØøĮ ŌłÆ sinØøĮ Øø╝ ØæŻ ŌłÆ ØøĮØ£Ö╠ć Øø╝ + sin2Øø╝ 2Øø╝ Øø╝ + ØøĮ Ø£å 21/26
- 23. Analisis kestabilan (7) ŌĆó Dengan demikian, maka dengan menyatakan Ø£ö sebagai maka Øæē╠ć = ŌłÆØ£å Øø╝ dan nilainya selalu negatif dan nol untuk Øø╝=0. ŌĆó Tetapi ingat: pertanyaan ini belum terjawab: apakah Ø£ī╠ć = ØæŻ cosØøĮsin Øø╝ ŌłÆ Ø£å Ø£īcos Øø╝ bernilai negatif? ŌĆó Untuk memastikannya, kita membutuhkan bantuan ŌĆ£BarbalatŌĆÖs LemmaŌĆØ, yaitu jika Øæē (Øø╝(ØæĪ), ØøĮ(ØæĪ)) bernilai antara [0, Ōł×) dan Ōł½ Øæē (Øø╝(t), ØøĮ(t)) ØææØæĪ ada dan terbatas (tidak tak-hingga), maka Øø╝(ØæĪ) ’āĀ0 dan ØøĮ(ØæĪ) ’āĀ0 seiring bertambahnya waktu. ŌĆó Kita tahu bahwa adalah persamaan paraboloid (parabola dalam ruang 3 dimensi) yang nilainya antara [0, Ōł×). Ø£ö = Ø£å Øø╝ + Øø╝ + ØøĮ Ø£ī sin2Øø╝ 2Øø╝ cosØøĮ ŌłÆ sinØøĮ Øø╝ ØæŻ ŌłÆ ØøĮØ£Ö╠ć Øø╝ + sin2Øø╝ 2Øø╝ Øø╝ + ØøĮ Ø£å 22/26
- 24. Analisis kestabilan (8) ŌĆó Mari kita tinjau kembali: , Øæē╠ć = ŌłÆØ£å Øø╝ Ōēż 0. ŌĆó Karena Øæē bernilai antara [0, Ōł×) dan selalu berkurang, maka Ōł½ Øæē (Øø╝(t), ØøĮ(t)) ØææØæĪ tidak akan menuju tak-berhingga. ŌĆó Semakin waktu bertambah menuju ØæĪ ŌåÆ Ōł×, nilai Øæē akan berkurang, karena dengan ØæŻ dan Ø£ö yang sudah dirancang tadi, Øæē╠ć selalu bernilai negatif, berapapun nilai Øø╝. ŌĆó Seandainya pun nilai Øø╝ menjadi konstan sesaat (tidak bergerak), Øæē tetap berkurang. Pengurangan ini pasti disebabkan oleh berkurangnya ØøĮ , yang berarti nilai ØøĮ ŌåÆ 0. ŌĆó Dengan demikian, berdasarkan BarbalatŌĆÖs Lemma, maka seiring berjalannya waktu, Øø╝ ŌåÆ 0 dan ØøĮ ŌåÆ 0. ŌĆó Mari kita tinjau kembali: Ø£ī╠ć = ØæŻ cosØøĮsin Øø╝ ŌłÆ Ø£å Ø£īcos Øø╝ ŌĆó Karena Øø╝ ŌåÆ 0 dan ØøĮ ŌåÆ 0, maka Ø£ī╠ć ŌåÆ ŌłÆØ£å Ø£ī. Dengan demikian, Ø£ī ŌåÆ 0 juga. 23/26
- 25. Control Law untuk differential-steered robot ŌĆó Setelah melalui analisis kestabilan Lyapunov dan verifikasi dari BarbalatŌĆÖs Lemma, maka kita mendapatkan control law: ŌĆó Karena robot yang digunakan adalah differential-steered robot, maka kedua control law di atas disesuaikan untuk kecepatan putar roda kiri (Ø£ö ) dan roda kanan (Ø£ö ). ØæŻ = ØæŻ cosØøĮ + Ø£å Ø£ī cosØø╝ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ”ŌĆ” (5) Ø£ö = Ø£å Øø╝ + cosØøĮ ŌłÆ ØæŻ ŌłÆ ╠ć + Øø╝ + ØøĮ Ø£å ŌĆ”ŌĆ”(6) ØæŻ = Øæģ 2 ØæŻ + ØæŻ Ø£ö = Øæģ ØæÅ ØæŻ ŌłÆ ØæŻ 2ØæŻ Øæģ = ØæŻ + ØæŻ ØæÅØ£ö Øæģ = ØæŻ ŌłÆ ØæŻ Ø£ö = ØæģØæŻ = ØæŻ ŌłÆ ØæÅØ£ö/2 Ø£ö = ØæģØæŻ = ØæŻ + ØæÅØ£ö/2 Control law untuk differential-steered robot ’āĀ Dimasukkan ke program (7) 24/26
- 26. Algoritma tracking Dengan demikian, maka dapat disusun algoritma ringkas untuk memprogram Control Law differential-steered wheeled robot sebagai berikut: 1. Start 2. Set nilai Ø£å dan Ø£å dengan nilai-nilai positif. 3. Identifikasi posisi dari robot (Øæź, Øæ”, ŽĢ) menggunakan sensor (localization) 4. Identifikasi posisi dari target (Øæź , Øæ” , Ø£Ö ). 5. Kalkulasi nilai-nilai Žü, Øø╝, ØøĮ (persamaan (3)) 6. Kalkulasi nilai ØæŻ dan Ø£ö (persamaan (5) dan (6)) 7. Kalkulasi nilai Ø£ö dan Ø£ö (persamaan (7) ) 8. Jika Žü, Øø╝, ØøĮ belum mencapai nol, ulangi Langkah 3-7. 9. Selesai. 25/26
- 27. Kesimpulan ŌĆó Pemodelan dan simulasi berguna untuk memprediksi kinerja dari sistem, dalam hal ini differential-steered wheeled robot. ŌĆó Pemodelan kinematika untuk differential-steered wheeled robot dapat menjelaskan efek dari input ØæŻ dan Ø£ö (atau Ø£ö dan Ø£ö ) terhadap kinerja robot dalam melakukan tracking terhadap targetnya. ŌĆó Agar proses tracking dapat berjalan dengan sukses, salah satu pendekatan analisisnya adalah menggunakan Prinsip Stabilitas Lyapunov dan BarbalatŌĆÖs Lemma. ŌĆó Dengan menggunakan Prinsip Stabilitas Lyapunov dan BarbalatŌĆÖs Lemma, maka input ØæŻ dan Ø£ö (atau Ø£ö dan Ø£ö ) dapat menjamin kesuksesan misi tracking, karena stabilitas variabel-variabel navigasinya pada titik origin dapat dibuktikan. ŌĆó Setelah input ØæŻ dan Ø£ö didapatkan, maka kita dapat menyusun algoritma dan program pada microcontroller/microprocessor. 26/26
- 28. Referensi ŌĆó Huang, L. Control approach for tracking a moving target by a wheeled mobile robot with limited velocities, IET Control Theory and Applications 3(12), pp. 1565-1577, 2009 ŌĆó Widyotriatmo, A., Pamosoaji, A.K. and Hong, K.S. Control architecture of an autonomous material handling vehicle, International Journal of Artificial Intelligence 10, pp. 139-153, 2013. ŌĆó Khalil, H. K. Nonlinear Systems (3rd ed.). Prentice Hall, Upper-Saddle River, New Jersey, USA, 2002.
- 29. Pertanyaan / diskusi lebih lanjut, silakan menghubungi saya: Anugrah K. Pamosoaji, Ph.D. Departemen Teknik Industri, Fakultas Teknologi Industri Universitas Atma Jaya Yogyakarta E-mail: anugrah.pamosoaji@uajy.ac.id