ARĊÎẄÌṡÆø ṁÚ9ÕÂ ċâċÇċêċóċḞĊÈṪḃáẁ¶Ċḟ
?
0 likes?2,877 views

Èḋ7ṠØḂẃARĊÎẄÌṡÆøḂṠÝÕiṠá @ cluster. #1£Ẁhttps://vrtokyo.connpass.com/event/96605/£©ĊÎṁÚ6ṠØĊÇḞkḟíĊṖĊṡÙYÁÏĊÇĊṗ

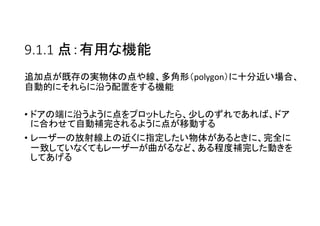
![9.1.1 ṁã£ẃṪîĊâẃ
gĊÇṪÔÈṠĊÊṖẄṖẀ
? ṪîĊâẃ
gĊÇṪÔÈṠĊÊṖẄṖẀ
? ÊṗÓÃÕßĊËÎṠÖÃĊòÖḟẄÓÖẁ¶ẀĊṖĊÆĊâ
ĊéĊḊ
? ÀýĊẀĊŴċÈċéċÃċċóċḞĊṁĊìĊṡÊÖṀü
ĊäṗPĊòÊṗÓÃĊṗĊëṖẄṖẀ
[Lee et al. 2002]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-10-320.jpg)
![9.1.1 ṁã£ẃṗâẅͶÉäṖẀ
ÊÖṀüĊäṗPĊÏẄüĊŸĊÎöËùĊṖĊḋÈëÁḊ
ĊÇĊĊÊĊĊĊỲḂḃ¶àĊŸĊÎöẃÏĊÏëxĊìĊṡ
ÎṠÖÃĊḋĊéĊÎĠÙṪṫĊỲḟØÒẂ
? ṗâẅͶÉäṖẀ£Ẁraycasting£©
? ÌåĊÎÒṠĠṡ£Ẁî^ĠṡḂḃÒṁãḂḃÊÖ£©ĊòÆŵ
ṁãĊÈĊṖĊÆḂḃhẅġÖŴĊËṗâÔṀĊòṖÅÉä
ĊṗĊëḂ£ṁãĊÏḂḃṪîġõĊÎṗâẅĊÈẄṠĠî
ĊṗĊë¶ŷĊÄÄṡĊÎṗâẅĊÇÖẁ¶ẀĊṗĊë[Bunnun and Mayol-Cuevas 2008]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-11-320.jpg)
![9.1.1 ṁã£ẃáĊêôéĊÈḂĊêṖẀ
? áĊêôéĊÈḂĊêṖẀ
? ẄṠṁãĊÎṀúĊïĊêĊËḂḃċŶċḊċṗċÛċĊ©`
ċëĊäĊẄĊìĊËîËÆĊṖĊṡṁÀẅßĊòÓÃĊĊ
ĊÆḂḃÃṫṀ_ĊËẅàëxĊòÖẁ¶ẀĊṗĊëṖẄṖẀ
[Bunnun and Mayol-Cuevas 2008]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-12-320.jpg)
![9.1.1 ṁã£ẃ®ĊÊĊëÒṁãĊòÀûÓÃĊṗĊë
ÎÝÍâÀûÓÃrĊÊĊÉĊÎëxĊìĊṡöËùĊË
ÒÆÓĊṗĊëĊÎĊỲÃæṁṗĊÊr
? ®ĊÊĊëÒṁãĊòÊṗÓÃÕßĊËÌáṗ©ĊṗĊë
ṖẄṖẀ
? ÀýĊẀĊŴḂḃġàĊËìĊŶĊìĊÆĊĊĊëĊè
ĊḊĊÊGPSṪùËĊËṠùĊÅĊĊĊÆÈḂṁÃĊṁ
ĊìĊëṡÕṀéṠÏñĊÇḂḃ¶ŷṀÎÔẂÎṠÖÃĊò
ßxĊŴĊṠĊë
[Wither et al. 2006]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-13-320.jpg)
![9.1.2 ÆẄÃæ
ÈýṁãĊòÖẁ¶ẀĊṗĊëĊġĊÈĊÇḂḃÈÎÒâĊÎÆẄ
ÃæĊò¶ẀÁxĊṗĊëĊġĊÈĊỲĊÇĊĊŶĊṗ
ḃÙ ÈýṁãÖẁ¶Ẁ
ḃÚ ỳÈṀæÆẄÃæṪṀĊζŷṁãĊÈḂḃAĊĊòÊẅĊṗ
ṁÚÈýṁãĊÎÖẁ¶Ẁ
ḃÛ ÊṗÓÃÕßĊÎî^ĠṡĊḋĊéĊÎċÙċŸċÈċëĊÈÖØ
ÁḊṖẄÏòĊÎIṖẄĊËäĊẀĊéĊìĊṡÆẄÃæ
ḃÜ ÊṗÓÃÕßĊÎî^ĊÈÊÖÏÈĊòẄYĊÖċÙċŸċÈċë
ĊËÖḟŴŴĊṖḂḃÖØÁṡṖẄÏòĊËBĊḊÆẄÃæ
ḃÝ ÊṗÓÃÕßĊÎÊÖÏÈĊòẃỲĊßḂḃÖØÁḊṖẄÏòĊÈ
ÖḟŴŴĊṗĊëÆẄÃæ
ḃÙ ḃÚ
ḃÛ ḃÜ ḃÝ
[Piekarski and Thomas 2004]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-16-320.jpg)
![9.1.3 ÌåṖe£ẃËØÖḟĊÊṖẄṖẀ
? ÌåṖeĊòÖẁ¶ẀĊṗĊëṪîĊâËØÖḟĊÊṖẄṖẀĊÏḂḃ¶àÊýĊÎṁãĊòÈëÁḊĊṖ£ẀḃÙ£©Ḃḃ¶àẄÇŴÎ
ĊòŴÎġÉĊṗĊëċẀċÃċẁĊÇṁãÈẃĊòẄÓẅAĊṖ£ẀḃÚ£©ḂḃÌåṖeĊòŴÎġÉĊṗĊë¶àẄÇŴÎÈẃĊò
ṪṫġÉĊṗĊë£ẀḃÛ£©ṖẄṖẀĊÇĊṗ
? ÎïÌåĊÎÑ}ëjĊṁĊËĊèĊÃĊÆḂḃÃæṁṗĊÇÕ`ĊêĊäĊṗĊŸĊÊĊêĊŶĊṗ
ḃÙ ḃÚ ḃÛ
[Lee et al. 2002]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-17-320.jpg)
![9.1.3 ÌåṖe£ẃ OutlineAR£Ẁ
gỳĊÊÊÖṖẀ£©
?
gỳĊÊÊÖṖẀĊÏḂḃṠùḟẅṁÄĊʶÌẅ¶ĊÈ
ẁßĊṁĊòÖẁ¶ẀĊṗĊëṖẄṖẀĊÇĊṗ
? ÒṠḞãṁÄĊËÑẃĊṖġöĊṖĊÏßmÇŴĊÊÁḃÌå
îIÓòĊòṪṫġÉĊṗĊëĊṡĊáĊËĊèĊŸñĊé
ĊìĊëÊÖṖẀĊÇĊṗ
? OutlineARĊÏÉÏÓċĊċóċṡċéċŸċṖċç
ċóĊÇḂḃṗÇẄMĊßĊòÔO¶ẀĊṗĊëĊġĊÈĊỲ
ĊÇĊĊŶĊṗ
[Bunnun and Mayol-Cuevas 2008]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-18-320.jpg)
![9.1.3 ÌåṖe£ẃ JIIM
? JIIM£ẀJiim is In-situ Image-based Modelling£©
? ÊṗÓÃÕßĊỲSLAMĊÎÈýṀÎÔẂṁØíĊÎċ©`ċÕċì©`ċàĊËĊẂĊĊĊÆḂḃ¶àẄÇŴÎÃæĊÎ
ÝṗùÈḂĊêĊòŴŴĊḊĊġĊÈĊỲĊÇĊĊŶĊṗ
[van den hengel et al. 2009]
[https://www.youtube.com/watch?v=-7YurLFnPD0]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-19-320.jpg)
![9.1.3 ÌåṖe£ẃÑ}ëjĊÊŴÎṪṀ
ĊèĊêÑ}ëjĊÊŴÎṪṀĊÎÌåṖeĊÎċâċÇċêċó
ċḞṖẄṖẀ
? ÌåṖeĊÎẃÍḂḃṖeḂḃĠîĊÎẄMĊßẃÏĊïĊṠ
ĊËĊèĊëġÉÁḃÌåḟíỲF£ẀḃÙ£©
? ÒẅṖẄÏòĊËĊẂĊḟĊëĊĊĊŸĊÄĊḋĊÎṪṫ
IÆẄÃæĊÇḂḃẄẀÎïĊÎĊèĊḊĊÊÁḃÌåĊÎ
ÝṗùĊòÖẁ¶Ẁ£ẀḃÚ£©
[Piekarski and Thomas 2004]
ḃÙ
ḃÚ](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-20-320.jpg)
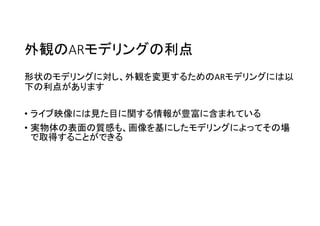
![Dynamic Shader Lamps
? ÎïÌåḟíÃæĊÎċÆċŸċṗċÁċãĊÈĊṖĊÆĊÏ
ẃÎĊâĊÊĊŸḂḃoÉḋĊÇĊḃĊë
? ÊṗÓÃÕßĊỲÃèĊŸÓṪṫĊòĊṗĊëĊṡĊÓĊËḂḃ
ṗPÏÈĊÎÎṠÖÃĊỲċÕċḂċóċÈċàĊÎċÆċŸ
ċṗċÁċãṪùËĊØĊÈäQĊṁĊìĊë
? 9rĊÎÅ®ĊÎṪÓ
[Bandyopadhyay et al. 2001]
[https://www.youtube.com/watch?v=wv7lUeRToqk]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-24-320.jpg)
![ċÓċÇċẂÍẁß^ŴÍċÇċ£ċṗċṪċìċĊĊòÓÃĊĊĊṡÊÖṖẀ
ḃÙ HMDĊòÉíĊËĊÄĊḟĊÆĊĊĊëÊṗÓÃÕß
ĊỲḂḃċÈċéċÃċċóċḞĊṁĊìĊṡṗPĊòÓÃ
ĊĊĊÆgÎïÌåÉÏĊËÃèṠ
ḃÚ ÊṗÓÃÕßĊỲHMDĊòÍẀĊṖĊÆĊßĊÆĊĊ
ĊëÓġÏñ
ḃÙ
ḃÚ
[Grasset et al. 2005]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-25-320.jpg)
![ARċẀċḃċÖċéċṖ
ḃÙ ṗPĊòìFÆṫĊËÖÃĊQĊẀĊṡĊâĊÎ
ḃÚ ìFÆṫĊòÓÃĊĊĊÆÎïÌåḟíÃæÉÏ
ĊËÃèṠĊṗĊëċṖċßċåċì©`ċṖċçċóĊỲ
ṡÉÄÜ
? ìFÆṫĊÇÃèṠÃæĊḋĊéëxĊìĊìĊŴëx
ĊìĊëĊÛĊÉÚĊĊṗ ìĊòTĊìĊŶĊṗ
? ÀûĊÍóĊÇĊÊĊĊṖẄĊÇŴÍḞæĊòġÖĊÄĊġĊÈ
ĊÇḂḃḟíÃæĊØĊÎTÁÏĊÎẁ¶ṪÅĊòÖÆÓù
ĊÇĊĊŶĊṗ
? ÓẅĊṁĊìĊṡṠỳÒĊÏċḞċéċÇ©`ċṖċçċó
ĊòṪṫĊëĊṡĊáĊËḂḃìFÆṫĊÈŴÍḞæĊòÍỲ
rĊËÓĊḋĊṠĊŶĊṗ[Marner et al. 2009]
ḃÙḃÚ](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-26-320.jpg)
![ṪÔÓṁÄĊÊÈýṀÎÔẂÍÔẂ
? ẁßËÙĊÊÑÝËãṪḞÖÃĊäḞÂŴŴċṠċóċṁĊòÓÃĊĊĊëĊġĊÈĊÇÃÜĊËÈýṀÎÔẂÍÔẂĊṗĊëĊġ
ĊÈĊâṡÉÄÜĊÇĊṗ
? KinectFusion: Real-Time Dense Surface Mapping and Tracking
? DTAM:DenseTrackingandMappinginReal-Time
[Newcombe et al. 2011b]
[https://www.youtube.com/watch?v=quGhaggn3cQ]
[Newcombe et al. 2011a]
[https://www.youtube.com/watch?v=Df9WhgibCQA]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-28-320.jpg)
![ÈḋṪÔÓĊÇĊÏĊÊĊŸḂḃḞëṪÔÓ
ÈḋṪÔÓĊÎÇṖṁãĊòÑaĊḊĊṡĊáĊËḂḃḞëṪÔÓĊËĊè
ĊëÔÙġÉĊòṡỳĊẀĊŶĊṗ
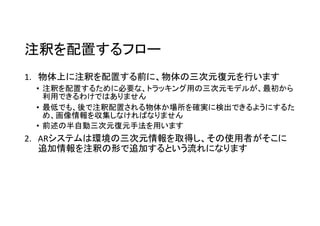
1. ṪîĊâẃ
gĊÊÊṗĊĊṖẄĊÏḂḃĊẄĊÎöÃæĊËĊÆÖ§
ÅäṁÄĊÊÆẄÃæĊòÍƶẀĊṗĊëĊṡĊáĊËSLAMĊò
ÊṗÓÃĊṗĊëṖẄṖẀĊÇĊṗ
2. eĊÎṖẄṖẀĊÏḂḃṠÏñÖŴĊÎÏûʧṁãĊÎÊġö
ĊÇĊṗḂ£ĊẄĊìĊËĊèĊÃĊÆẃ
gĊÊÎïÌåĊÎÅäÖÃ
ĊòÖ§Ô®ĊÇĊĊëĊṡĊáḂḃṁØÃæĊÈṡÕégĊÎÏòĊ
ĊòQĊáĊëĊġĊÈĊỲĊÇĊĊŶĊṗ
[Salas-Moreno et al. 2013]
[https://www.youtube.com/watch?v=tmrAh1CqCRo]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-30-320.jpg)
![OutlineAR ĊÈĊẄĊÎ
? OutlineARĊÏḂḃSLAMĊÎċŶċÃċṪṪṫĊê
ĊËĊẂĊĊĊÆḂḃṗÇẄMĊßŴÎṪṀĊòṪṫġÉ
? SimonĊÏḂḃĊġĊÎṖẄṖẀĊòÄ£ŴÍÑuṪṫ
ĊÈċŶċÃċṪṪṫġɶÎëAĊòÇŴĊêÌæĊẀĊë
ĊġĊÈĊÇĊṖĊŶĊṖĊṡ
[Bunnun and
Mayol-Cuevas 2008]
[Simon 2010]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-31-320.jpg)
![JIIMĊËĊèĊëḞëṪÔÓÔÙẃB
? JIIMĊâÍỲĊËċŶċÃċṪṪṫÑuĊÈċâċÇċê
ċóċḞĊòṖÖĊḟĊÆĊĊĊŶĊṗ
? ċâċÇċêċóċḞrĊÏḂḃċṡċÖċìċÃċȶËÄ©
ÉÏĊÇẅĠÖṗṠĊòÌáÊẅĊṖḂḃÊṗÓÃÕßĊÏ
ċÝċêċṀċóĊÎÍâĊòÃèĊĊŶĊṗ
? ċÝċêċṀċóĊÏḂḃSLAMĊÎċŶċÃċṪÖŴĊÎ
ÈýṀÎÔẂÇéóĊḋĊéÍƶẀĊṖĊṡgÎï
ÌåḟíÃæĊÎḞÂŴŴĊËẃÏĊïĊṠĊÆṪÔÓ
ṁÄĊËÅäÖÃĊṁĊìĊŶĊṗ
[van den hengel et al. 2009]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-32-320.jpg)
![ProFORMAĊËĊèĊëḞëṪÔÓÔÙẃB
? ÊÖĊÎĊÒĊéĊŸĊéĊĊĊÎŴḂĊṁĊÊÎïÌåĊÎḂḃŴÎṪṀĊÈ
ÍâÓQĊòḞëṪÔÓĊÇÔÙẃBĊṖĊŶĊṗ
? ÊṗÓÃÕßĊÏĊẄĊÎċḋċáċéĊÎÇḞĊÇÎïÌåĊòṠØÜĊṁ
ĊṠĊŶĊṗḂ£ĊẄĊÎÎïÌåĊÎḂ©ĊÊṪËÝĊÎṠÏñ
ĊËĊṖĊÆḂḃĊẄĊÎÎïÌåĊÎÝṗùĊỲḟġẅḞĠîṖÖ
ĊËĊèĊêÍƶẀĊṁĊìḂḃṀ_ÂÊṁÄĊËSpace Carving
ṖẀĊËĊèĊêËÄÃæÌåĊÇġÉĊṁĊìĊëîIÓòĊỲġéġö
ĊṁĊìĊŶĊṗ
? ċâċÇċêċóċḞĊòṪîßmĊËÍêËìĊṗĊëṖẄṖẀĊòḂḃÊẁ
ÓḂĊÇṡÉÒṠŸĊṖĊÆĊĊĊŶĊṗ
[Pan et al. 2009]
[https://www.youtube.com/watch?v=vEOmzjImsVc]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-33-320.jpg)
![ÊÒÄÚĊÎḞëṪÔÓÔÙġÉ
? ċÑċÎċéċŶṠÏñĊÎṀéÓḞĊÈḂḃċì©`
ċ¶©`ṖÅÉäĊòÒṠ¶ÈĊËgÊ©ĊÇĊĊëṪḞ
ÖÃĊòÊṗÓÃĊṖĊŶĊṗ
? ċì©`ċ¶ẅàëxÓĊÇŸEĊËṁÃĊéĊìĊëẅà
ëxĊÏḂḃḟÚĊÊĊÉĊÎÆẄÃæĊòÌضẀĊṖḂḃ
ÔìĊò¶ẀÁxĊṗĊëĊÎĊËÀûÓÃĊṖĊŶĊṗ
? ÃÜĊËÔìĊòÍƶẀĊṗĊëÊÖṖẀĊÊĊÉĊÇ
ÊÒÄÚÔìĊÎÌåṖeċâċÇċëĊËĊġĊÎ
ÇéóĊỲẄyẃÏĊṁĊìĊŶĊṗ
[Nguen et al. 2013]
[https://www.youtube.com/watch?v=67cAqq6ioGs]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-35-320.jpg)
![ÎÝÍâĊÎḞëṪÔÓÔÙġÉ
? ÄÜÓŴÍĊÎḞÂŴŴĊṠÏñċṠċóċṁĊòÓÃĊĊĊëĊġĊÈĊÇḂḃḞëṪÔÓĊÇĊÎÈýṀÎÔẂÍÔẂ
ĊòÖ§Ô®ĊÇĊĊëċìċÙċëĊÎŴÅîmŴÔĊÎẁßĊĊṪẃÎѧṁÄÇéóĊỲÈÝÒṪĊËṁÃĊéĊì
ĊŶĊṗ
? ÒṠṁãĊÎċì©`ċ¶ẅàëxÓĊÇĊâÎÝÍâhẅġĊÎŴÎṪṀÈḂṁÃĊòÈÝÒṪĊËĊÇĊĊŶĊṗ
[Wither et al. 2008]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-36-320.jpg)
![SemanticPaint
? ÊṗÓÃÕßĊỲRGB-DċḋċáċéĊòÓÃĊĊĊÆ
ÊÒÄÚhẅġĊòÓyĊṖḂḃẃ
gĊÊċṡċÃ
ċÁĠÙṪṫĊËĊèĊÃĊÆċṖ©`ċóĊòṖÖẁîĊÇ
ĊĊë
[Valentin et al. 2015]
[https://www.youtube.com/watch?v=z_TcWC7yjj0]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-38-320.jpg)
![SemanticPaintbrush
? ÎÝÍâĊÇĊâÍỲĊÎCÄÜĊỲÈÝÒṪĊË
gỲFĊÇĊĊŶĊṗ
? Ìõỳŷẁ¶ĊṀ_ÂÊö£ẀConditional
Random Field£©ĊòÓÃĊĊĊṡÓṁÄC
ŴṁѧÁIÀíĊËĊèĊêḂḃẅ@ẅAṁÄĊËîI
ÓòṖÖẁîĊòċẂċóċéċĊċóĊÇẄâÎöĊṖḂḃĊẄ
ĊìĊËêĊẁĊÆhẅġĊÎŴÂĊṖĊŸÖḟẄÓÒ
ĊẀĊÊĊĊĠṡṖÖĊËĊâṪḃáĊòĊÄĊḟĊëĊġ
ĊÈĊỲĊÇĊĊŶĊṗ
[Miksik et al. 2015]
[https://www.youtube.com/watch?v=3x9qtJjXkuY]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-39-320.jpg)
![Screendesign
? ÊṗÓÃÕßĊỲÖæṡÕĊËÇúẅĊòÃèĊŸĊġĊÈ
ĊỲĊÇĊḂḃÇúẅĊËṪÔÓÉÇúÃæĊòẃÏĊï
ĊṠĊëĊġĊÈĊỲĊÇĊĊëċṖċṗċÆċà
? ¶ŷṀÎÔẂṁÄĊËÒĊẀĊÆĊĊĊŶĊṗĊỲḂḃÊṗ
ÓÃÕßĊÏÁḃÌåÒĊṖĊÆĊĊĊŶĊṗ
[Fiorentino et al. 2002]
[https://www.youtube.com/watch?v=XcHuaOFpg7g]
ḃÙ
ḃÚ](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-43-320.jpg)
![ìFÆṫĊËĊèĊëċâċÇċêċóċḞ
? ÁḃÌåÎïĊÎṪÔÓÉċâċÇċêċóċḞĊËĊẂĊḟ
ĊëĊâĊḊÒṠĊÄĊÎÖḟẁŴṁÄĊÊṖẄṖẀĊÏḂḃ
ḞkÅÝÁ£ṪÓĊòÄ£ĊṖĊṡìFÆṫĊòÓÃ
ĊĊĊëṖẄṖẀĊỲĊḃĊêĊŶĊṗ
[Jung et al. 2004]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-44-320.jpg)
![ỳÈṀæĊÎỳỳṖẀĊòÓÃĊĊĊṡċâċÇċêċóċḞ
? ÔOÓÕßĊÏḂḃỲṡÌĊäËØÃèĊÈĊĊĊÃĊṡ
ỳÈĊËṀ_ÁḃĊṁĊìĊṡÜṡŴgṁÄỳỳṖẀĊò
ẃÃĊàĊḋĊâĊṖĊìĊŶĊṠĊó
? ÀýĊẀĊŴḂḃṗĊIÔOÓÕßĊÏÔṪṫÓÃ
ĊÎṁÀẅßĊÈĊṖĊÆḂḃḞkÅÝËØĠÄĊòÇŴ¶Ï
ĊṖĊÆÊṗÓÃĊṖĊŶĊṗ
? ḞkÅÝËØĠÄĊÈÇŴ¶ÏCĊòċÈċéċÃċċó
ċḞḂ£ĊẄĊÎäŴÎß^ġÌĊòċṖċßċåċì©`ċÈ
ĊṖḂḃÇŴ¶ÏĊṁĊìĊṡĠṡṖÖĊäÄÚĠṡÔìḂḃ
ÄṡËŴÎṪṀĊÊĊÉĊÎṪṖỳÓÇéóĊòÌá
ÊẅĊṖĊŶĊṖĊṡ[Marner and Thomas 2010]
[https://www.youtube.com/watch?v=VPUT2l5JvT0]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-45-320.jpg)
![AR-Jig
ḞkÅÝËØĠÄĊÎÇŴ¶ÏĊÇĊÏḂḃÒâíĊṖĊṡ
ŴÎṪṀĊòÎïÀíṁÄĊËṪṫġÉĊÇĊĊÊĊḟĊì
ĊŴĊÊĊéĊÊĊĊḂḃĊÈĊĊĊḊÏŶẄçĊỲĊḃĊë
ḃÙ AR-JigĊÇĊÏḂḃċÈċéċÃċċóċḞĊṁĊì
ĊṡċÔċóÅäÁŴĊòÓÃĊĊĊÆḂḃÊṗÓÃÕß
ĊỲ¶ŷṀÎÔẂÇúẅĊòÈëÁḊĊÇĊĊë
ḃÚ ÈḂĊêŶzĊŶĊìĊṡÇúẅĊòḃÏëĊÎỲ
ṡÌĊòĊṗĊëĊṡĊáĊËÀûÓÃĊÇĊĊë
[Anabuki and Ishii 2007]
ḃÙ
ḃÚ](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-46-320.jpg)
![Construct3D
? ÊýѧĊòÃãĊṗĊëĊṡĊáĊËḂḃẁßṀÎ
ÔìĊÎŴÎṪṀÖÆṪṫĊâÌáṗ©ĊÇĊĊŶĊṗ
? HMDĊòṪḞṪÅĊṖĊṡѧÉúĊỲḂḃÑ}ÊýĊÎ
ṠØÜÇúÃæĊÎẄṠĠîÇúẅĊÊĊÉḂḃÖÆ
ỳsẁ¶ĊċâċÇċêċóċḞỳỳŴgĊòÓÃĊĊĊÆḂḃ
ÔṁÄĊËÃẄẄéäÊýĊòäẁüĊṗĊë
ĊġĊÈĊỲĊÇĊĊŶĊṗ
[Kaufmann et al. 2000]
[https://www.youtube.com/watch?v=QvsN-5GykhA]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-47-320.jpg)
![ṪḃáĊÎÓŴÓÃŴÔ
? ®ĊÊĊëṖNîĊÎṪḃá£ẀċẂċóċéċĊċó?
ċẂċÕċéċĊċó£©ĊògÎïÌåĊËÇéóĊòỳ~
ẁ¶ĊḟĊëĊġĊÈĊÏḂḃÓŴÓÃŴÔĊỲĊḃĊêĊẄĊḊ
ĊÇĊṗ
? ṪḃáĊòẁ¶ÓëĊṗĊëĊġĊÈĊÇḂḃÊṗÓÃÕß
ĊỲhẅġĊËĊÄĊĊĊÆÁỳĊŸÀíẄâĊṖÒĊẀ
ĊëĊṡĊáĊËÒÛÁḃĊÄĊâĊÎĊÇĊṗ
[Starner et al. 1998]
[Wither et al.2009]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-49-320.jpg)
![Augment-able reality
? ËûĊÎÀûÓÃÕßĊÈĊÎṪḃáṗĠÓŴĊÏḂḃċẄ©`
ċṖċãċëċġċóċÔċå©`ċÆċ£ċóċḞĊËĊẂĊĊĊÆ
ÖØÒẂĊÊCÄÜĊÇĊṗ
? Augment-able reality
£ẀṡÉÄÜĊÊỲFghẅġ£©
ḟØÒẂĊËêĊẁĊÆŴÂĊṡĊÊÇéóĊỲÌáṗ©Ċṁ
ĊìḂḃĊẄĊìĊæĊẀḂẁṡÉÄÜĊÊḂṗĊÈĊĊĊḊ
ÑÔÈ~ĊỲÊṗĊïĊìĊÆĊĊĊŶĊṗ
? ÎṠÖÃĊËỳ~ẁ¶ĊḟĊṁĊìĊṡṪḃáĊòċṁ©`ċŴ
ÉÏĊÇŴîṖeĊṗĊëĊġĊÈĊÇḂḃÇéóṗĠÓŴĊò
ṗĠÍỲĊÇṪṫĊêÉÏĊĠĊëĊâĊÎĊÈĊÊĊêĊŶĊṗ
[Rekimoto et al. 1998]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-50-320.jpg)
![ṪḃáÅäÖÃĊÎṪṫIØṁ£ĊÎÝXp
? ÎÝÄÚhẅġĊÇĊÏḂḃẅÀṀĊÎSLAMĊË
ĊèĊÃĊÆÈḂṁÃĊṖĊṡŸEĊÊÈýṀÎÔẂċŶċÃċṪ
ĊỲṪḃáĊòÅäÖÃĊṗĊëĊṡĊáĊËÖḟẄÓÓÃ
ĊĊĊëĊġĊÈĊỲĊÇĊĊŶĊṗ
? ÊṗÓÃÕßĊỲhẅġÖŴĊËṀæÔÚĊṗĊëṪẃÎ
ѧṁÄÌØÕĊòßxkĊṖḂḃċṖċṗċÆċàĊËĊẄ
ĊìĊéĊÎÌØÕĊòċÈċéċÃċċóċḞĊṁĊṠĊëĊÈ
ĊĊĊḊÊÖṖẀĊÇĊṗ
? ÌØÕĊỲṪÔÓṁÄĊËġéġöĊṁĊìĊëĊġĊÈĊÇḂḃ
ṪḃáÅäÖÃĊÎĊṡĊáĊËÊÖÓĊÇḟíÃæŴÎ
ṪṀĊòÖẁ¶ẀĊṗĊëĊÈĊĊĊḊṪṫIØṁ£ĊòÝX
pĊṗĊëĊġĊÈĊỲĊÇĊĊŶĊṗ
[Reitmay£ò et al. 2007]
[https://www.youtube.com/watch?v=2P_k-2pHiRs]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-52-320.jpg)
![ṪḃáĊζŷṀÎÔẂṁÄĊËÅäÖÃ
? ¶àĊŸĊÎöẃÏḂḃÈýṀÎÔẂĊÎṪḃáĊÏḂḃ
¶ŷṀÎÔẂṁÄĊËṪṫġÉĊÇĊĊŶĊṗ
? ċÓċÇċẂÍẁß^ŴÍĊÎŴŸḂċÇċ£ċṗċṪċì
ċĊÉÏĊǶŷṀÎÔẂṁÄĊËÊẁÓḂĊòÃèṠĊṖ
ĊṡĊêḂḃṠÃæÉÏĊÇÎïÌåĊäĊẄĊÎÒṠĠṡ
ĊòÒĊÇìĊÃĊÆÕ{ḟíÊẅĊṁĊṠĊëĊÊ
ĊÉĊṖĊÆḂḃARÓÃĊÎṪḃáĊòỳÓṗĊĊṗĊë
ĊġĊÈĊỲĊÇĊĊŶĊṗ[Gauglitz et al. 2014b]
[https://www.youtube.com/watch?v=wURXdhi4SdA]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-53-320.jpg)
![ṪḃáĊÎÑaÍê
? ṠÏñĊäÎïÌåṡÕégĊËĊẂĊḟĊëċẁċ§ċṗ
ċÁċãĊÇÕ{ĊṁĊìĊṡṪḃáĊÎÑaÍêĊä
ḞëṪÔÓÎïÌåṖÖẁîĊÏḂḃ¶ŷṀÎÔẂÈë
ÁḊĊÎáÃÁĊṁĊòĊÊĊŸĊṖḂḃ®ĊÊĊëÒṁã
ĊḋĊéÕýĊṖĊŸẄâáĊṗĊëĊṡĊáĊËÈýṀÎ
ÔẂĊÎöÃæĊËßmÓÃĊṗĊëĊġĊÈĊỲĊÇĊ
ĊŶĊṗ
[Nuernberger et al. 2016]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-54-320.jpg)
![ÎÝÍâĊÇĊÎṪḃáÅäÖÃ
? ÎÝÍâĊÇĊÎÓÃÍẅĊÈĊṖĊÆḂḃé_ĊḟĊṡh
ẅġĊÇÊṗÓÃÕßĊỲẄẀÎïĊËṪḃáĊòṪṖ
ỳÓĊÇĊĊëċṖċṗċÆċà
? ÎïÀíċṠċóċṁÇéó£ẀGPSḂḃṖẄÎṠḂḃ
IMU£©ĊËĊèĊêÊṗÓÃÕßĊÎỲFÔÚÎṠÖÃ
ĊỲQĊŶĊêḂḃṠÏñÉÏĊÇĊÎẄẀÎïĊÎẄÇ
ĊòÖẁ¶ẀĊṗĊëĊÈḂḃĊẄĊÎẄẀÎïĊỲċÈċé
ċċóċḞĊṁĊìḂḃÊṗÓÃÕßĊỲṠÏñÉÏĊÇ
ṪḃáĊòÅäÖÃĊÇĊĊŶĊṗ
[Kim et al. 2007]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-55-320.jpg)
![ÒÆÓċṠċóċṁĊòÓÃĊĊĊṡṪḃáÅäÖÃĊÎÀý
? ÎÝÍâĊÎĊÉĊġĊËĊÇĊâṪḃáĊÇĊĊëîB
ĊḋĊÄŴÔĊÎĊḃĊëċṖċṗċÆċà
? ÒÆÓċṠċóċṁĊÈċÑċÎċéċŶSLAMĊÎẄM
ĊßẃÏĊïĊṠĊÇẃB
[Gauglitz et al. 2014b]
[https://www.youtube.com/watch?v=xadks8UVwlA]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-56-320.jpg)
![GPSĊòÓÃĊĊĊṡṪḃáÅäÖÃĊÎÀý
? ċÑċÎċéċŶṠÏñĊÈṪḃáĊÎÎṠÖÃÇéó
ĊÏḂḃGPSṪùËĊÇỳ~ẁ¶ĊḟĊṖḂḃ
ċṁ©`ċŴĊËŴîṖeĊṖĊŶĊṗ
? ċÑċÎċéċŶṠÏñĊÎṀéÓḞÖŴĊâĊṖĊŸĊÏ
ĊẄĊÎááĊËḂḃhẅġÖŴĊÎÌØÕṁãĊòßx
kĊṖḂḃÎÄṪÖĊäÒôÉùĊÇṪḃáẁ¶ĊḟĊÇ
ĊĊŶĊṗ
[Langlotz et al. 2011]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-57-320.jpg)
![ÈýṀÎÔẂċâċÇċëĊòÓÃĊĊĊṡṪḃáÅäÖÃĊÎÀý
? ¶ỳÊŴĊÎÈýṀÎÔẂċâċÇċëĊỲÀûÓÃṡÉ
ÄÜĊÇĊḃĊëöẃÏḂḃċÑċÎċéċŶṠÏñĊÏḂḃ
¶ỳÊŴĊÎÈýṀÎÔẂċâċÇċëĊÈĊÎṠÏñ
ĊËṠùĊÅĊŸÕÕẃÏĊÎĊṡĊáĊËġỲÚẄÇṠ
ÏñĊÈĊṖĊÆQĊẀĊŶĊṗ
? ĊġĊÎĊèĊḊĊÊĊṁĊìĊṡẄMĊßĊÇḂḃ
ṁØÀíṪùËÏṁĊËÅäÖÃĊṁĊìĊṡṪḃá
ĊòÀûÓÃĊṗĊëĊġĊÈĊỲĊÇĊĊŶĊṗ
[Arth et al. 2014b]
[https://www.youtube.com/watch?v=XjXFpMVXwrk]](https://image.slidesharecdn.com/ar-181218132030/85/AR-9-58-320.jpg)
ARĊÎẄÌṡÆø ṁÚ9ÕÂ ċâċÇċêċóċḞĊÈṪḃáẁ¶Ċḟ
- 2. Õl£ṡ ? ẄẀẃB?ÍÁÄẅ?ċÇċ¶ċĊċÊIẄçĊÊĊÉ BtoB ÏòĊḟVRċÄ©`ċëĊÎé_Ḟk ? gĊÏ AR ĊÎé_ḞkĊÏ??? m(_ _)m ? ĊṖĊáĊÎĊŶĊṁĊḋĊêĊÇĊẂîĊĊĊṖĊŶĊṗ ? é_ḞkÊÖṖẀĊäċÁ©`ċàċÓċëċÇċ£ċóċḞĊÈĊḋĊâÅdζĊḃĊê ? ċṗċŸċéċàċŶċṗċṡ©`ĊÈĊḋĊäĊÃĊÆĊŶĊṖĊṡ ? ḟẅẃÃĊĊÇĊṗ ? ÂŷṠĊâẃÃĊĊÇĊṗ ? Twitter: @machidyo
- 3. ÄṡṀÎ 1. ĊÏĊẁĊáĊË 2. 9.1 ṪẃÎŴÎṪṀĊÎÖẁ¶ẀḂḋ9.6 ĊŶĊÈĊá
- 4. ĊÏĊẁĊáĊË
- 5. ARĊÎċĊċóċṡċéċŸċṖċçċóĊËḟØÒẂĊÊĊġĊÈ AR ĊËĊèĊëċĊċóċṡċéċŸċṖċçċóĊËĊÏÆÚṀýẁŴĊÏẁßĊŶĊÃĊÆĊĊĊëĊỲḂḃÊṗÓÃÕßĊËĊÈĊà ĊÆĊÉĊḊĊĊĊḊĊġĊÈĊỲḟØÒẂĊḋ£ṡ 1. ÊṗÓÃÕßṪÔÉíĊỲḂḃċâċÇċêċóċḞĊÈṪḃáẁ¶ĊḟĊËĊèĊÃĊÆḂḃgÊÀẄçĊÎṡÕégṁÄ ĊËỳ~ẁ¶ĊḟĊṁĊìĊṡŴÂĊṖĊĊċġċóċÆċóċÄĊòṪṫĊìĊëĊġĊÈ 2. ṪṀrßmêŴÍċâċÇċêċóċḞĊÇĊḃĊëĊġĊÈ £ẀÊÂÇḞÊäĊòḟØÒẂĊÈĊṠĊẃḂḃĊẄĊÎöËùḂḃĊẄĊÎÎṠÖÃĊÇṪṫIĊÇĊĊëĊġĊÈ£©
- 7. 9ÕÂĊÎṗ ì 1. ẅĠṁÄĊÊċâċÇċëĊÀĊḟĊòÉúġÉĊṗĊëḂḃŴÎṪṀĊÈÍâÓQĊÎċâċÇċêċóċḞĊỲÏó ? ÙtĊŸṪÔḞkṁÄĊËŴŴÓĊṗĊëċâċÇċëĊÏẃỲĊóĊÇĊĊĊŶĊṠĊó 2. ÈýṀÎÔẂÍÔẂĊÎḞëṪÔÓÊÖṖẀ 3. ṖÇÆẄÃæŴÎṪṀĊÈṪḃáĊÎṪÔÓÉŴÎṪṀċâċÇċêċóċḞ Ḃù ARĊØĊÎêÓÃĊËĊẂĊḟĊëÊËĊËĊÄĊĊĊÆĊÏṁÚ10ÕÂĊÈĊÊĊêĊŶĊṗ
- 9. ÏóĊÈĊṗĊëŴÎṪṀĊÏ£ġṖNî ? ċâċÇċêċóċḞĊÎṠùḟẅṁÄĊÊî}ĊÏḂḃṪẃÎѧŴÎṪṀĊÎġÉ gÎṠĊÇĊṗḂ£ĊẄĊġĊÇḂḃ 1. ṁã 2. ÆẄÃæ 3. ÌåṖe ĊÈĊĊĊÃĊṡ gỳĊÊŴÎṪṀĊËẄṗṁãĊòṁḟĊÆĊÆĊĊĊĊŶĊṗ ? ṪẃÎѧṁÄĊËĊÏgÌåĊÏCADĊÎċÇ©`ċṡÔìĊËîËÆĊṖĊÆĊĊĊŶĊṗḂ£ĊṡĊÀĊṖAR ĊËĊẂĊĊĊÆĊÏḂḃgëHĊÎÓĊĊỲḟØÒẂĊÈĊÊĊëĊṡĊáÈëÁḊỳỳŴgĊỲ®ĊÊĊêĊŶĊṗ
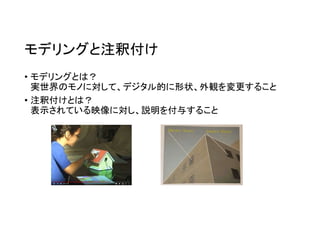
- 10. 9.1.1 ṁã£ẃṪîĊâẃ gĊÇṪÔÈṠĊÊṖẄṖẀ ? ṪîĊâẃ gĊÇṪÔÈṠĊÊṖẄṖẀ ? ÊṗÓÃÕßĊËÎṠÖÃĊòÖḟẄÓÖẁ¶ẀĊṖĊÆĊâ ĊéĊḊ ? ÀýĊẀĊŴċÈċéċÃċċóċḞĊṁĊìĊṡÊÖṀü ĊäṗPĊòÊṗÓÃĊṗĊëṖẄṖẀ [Lee et al. 2002]
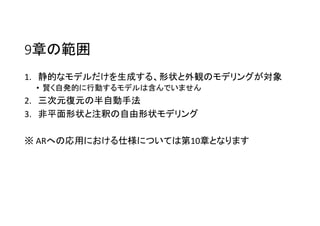
- 11. 9.1.1 ṁã£ẃṗâẅͶÉäṖẀ ÊÖṀüĊäṗPĊÏẄüĊŸĊÎöËùĊṖĊḋÈëÁḊ ĊÇĊĊÊĊĊĊỲḂḃ¶àĊŸĊÎöẃÏĊÏëxĊìĊṡ ÎṠÖÃĊḋĊéĊÎĠÙṪṫĊỲḟØÒẂ ? ṗâẅͶÉäṖẀ£Ẁraycasting£© ? ÌåĊÎÒṠĠṡ£Ẁî^ĠṡḂḃÒṁãḂḃÊÖ£©ĊòÆŵ ṁãĊÈĊṖĊÆḂḃhẅġÖŴĊËṗâÔṀĊòṖÅÉä ĊṗĊëḂ£ṁãĊÏḂḃṪîġõĊÎṗâẅĊÈẄṠĠî ĊṗĊë¶ŷĊÄÄṡĊÎṗâẅĊÇÖẁ¶ẀĊṗĊë[Bunnun and Mayol-Cuevas 2008]
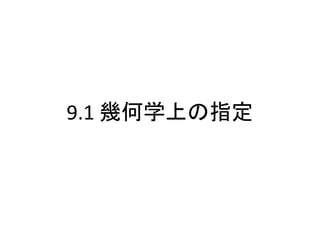
- 12. 9.1.1 ṁã£ẃáĊêôéĊÈḂĊêṖẀ ? áĊêôéĊÈḂĊêṖẀ ? ẄṠṁãĊÎṀúĊïĊêĊËḂḃċŶċḊċṗċÛċĊ©` ċëĊäĊẄĊìĊËîËÆĊṖĊṡṁÀẅßĊòÓÃĊĊ ĊÆḂḃÃṫṀ_ĊËẅàëxĊòÖẁ¶ẀĊṗĊëṖẄṖẀ [Bunnun and Mayol-Cuevas 2008]
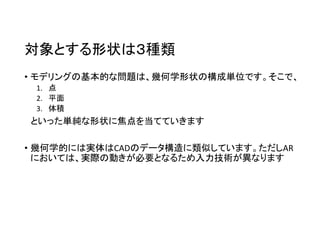
- 13. 9.1.1 ṁã£ẃ®ĊÊĊëÒṁãĊòÀûÓÃĊṗĊë ÎÝÍâÀûÓÃrĊÊĊÉĊÎëxĊìĊṡöËùĊË ÒÆÓĊṗĊëĊÎĊỲÃæṁṗĊÊr ? ®ĊÊĊëÒṁãĊòÊṗÓÃÕßĊËÌáṗ©ĊṗĊë ṖẄṖẀ ? ÀýĊẀĊŴḂḃġàĊËìĊŶĊìĊÆĊĊĊëĊè ĊḊĊÊGPSṪùËĊËṠùĊÅĊĊĊÆÈḂṁÃĊṁ ĊìĊëṡÕṀéṠÏñĊÇḂḃ¶ŷṀÎÔẂÎṠÖÃĊò ßxĊŴĊṠĊë [Wither et al. 2006]
- 14. 9.1.1 ṁã£ẃÓŴÓÃĊÊCÄÜ ṪṖỳÓṁãĊỲỳÈṀæĊÎgÎïÌåĊÎṁãĊäẅḂḃ¶àẄÇŴΣẀpolygon£©ĊËÊ®ṖÖẄüĊĊöẃÏḂḃ ṪÔÓṁÄĊËĊẄĊìĊéĊËÑØĊḊÅäÖÃĊòĊṗĊëCÄÜ ? ċÉċḃĊζËĊËÑØĊḊĊèĊḊĊËṁãĊòċṪċíċÃċÈĊṖĊṡĊéḂḃÉÙĊṖĊÎĊẃĊìĊÇĊḃĊìĊŴḂḃċÉċḃ ĊËẃÏĊïĊṠĊÆṪÔÓÑaÍêĊṁĊìĊëĊèĊḊĊËṁãĊỲÒÆÓĊṗĊë ? ċì©`ċ¶©`ĊÎṖÅÉäẅÉÏĊÎẄüĊŸĊËÖẁ¶ẀĊṖĊṡĊĊÎïÌåĊỲĊḃĊëĊÈĊĊËḂḃÍêÈḋĊË ÒṠÖÂĊṖĊÆĊĊĊÊĊŸĊÆĊâċì©`ċ¶©`ĊỲÇúĊỲĊëĊÊĊÉḂḃĊḃĊëġ̶ÈÑaÍêĊṖĊṡÓĊĊò ĊṖĊÆĊḃĊĠĊë
- 15. 9.1.2 ÆẄÃæ ? Ḃ©ĊÎṁãĊÏṪḃáĊÎṗ̶ẀṁãĊÈĊṖĊÆÓŴÓà ? ¶àĊŸĊÎỳẁẃÎѧṁÄĊÊṪṫÒṁĊÇĊÏÆẄÃæĊâÖØÒẂ
- 16. 9.1.2 ÆẄÃæ ÈýṁãĊòÖẁ¶ẀĊṗĊëĊġĊÈĊÇḂḃÈÎÒâĊÎÆẄ ÃæĊò¶ẀÁxĊṗĊëĊġĊÈĊỲĊÇĊĊŶĊṗ ḃÙ ÈýṁãÖẁ¶Ẁ ḃÚ ỳÈṀæÆẄÃæṪṀĊζŷṁãĊÈḂḃAĊĊòÊẅĊṗ ṁÚÈýṁãĊÎÖẁ¶Ẁ ḃÛ ÊṗÓÃÕßĊÎî^ĠṡĊḋĊéĊÎċÙċŸċÈċëĊÈÖØ ÁḊṖẄÏòĊÎIṖẄĊËäĊẀĊéĊìĊṡÆẄÃæ ḃÜ ÊṗÓÃÕßĊÎî^ĊÈÊÖÏÈĊòẄYĊÖċÙċŸċÈċë ĊËÖḟŴŴĊṖḂḃÖØÁṡṖẄÏòĊËBĊḊÆẄÃæ ḃÝ ÊṗÓÃÕßĊÎÊÖÏÈĊòẃỲĊßḂḃÖØÁḊṖẄÏòĊÈ ÖḟŴŴĊṗĊëÆẄÃæ ḃÙ ḃÚ ḃÛ ḃÜ ḃÝ [Piekarski and Thomas 2004]
- 17. 9.1.3 ÌåṖe£ẃËØÖḟĊÊṖẄṖẀ ? ÌåṖeĊòÖẁ¶ẀĊṗĊëṪîĊâËØÖḟĊÊṖẄṖẀĊÏḂḃ¶àÊýĊÎṁãĊòÈëÁḊĊṖ£ẀḃÙ£©Ḃḃ¶àẄÇŴÎ ĊòŴÎġÉĊṗĊëċẀċÃċẁĊÇṁãÈẃĊòẄÓẅAĊṖ£ẀḃÚ£©ḂḃÌåṖeĊòŴÎġÉĊṗĊë¶àẄÇŴÎÈẃĊò ṪṫġÉĊṗĊë£ẀḃÛ£©ṖẄṖẀĊÇĊṗ ? ÎïÌåĊÎÑ}ëjĊṁĊËĊèĊÃĊÆḂḃÃæṁṗĊÇÕ`ĊêĊäĊṗĊŸĊÊĊêĊŶĊṗ ḃÙ ḃÚ ḃÛ [Lee et al. 2002]
- 18. 9.1.3 ÌåṖe£ẃ OutlineAR£Ẁ gỳĊÊÊÖṖẀ£© ? gỳĊÊÊÖṖẀĊÏḂḃṠùḟẅṁÄĊʶÌẅ¶ĊÈ ẁßĊṁĊòÖẁ¶ẀĊṗĊëṖẄṖẀĊÇĊṗ ? ÒṠḞãṁÄĊËÑẃĊṖġöĊṖĊÏßmÇŴĊÊÁḃÌå îIÓòĊòṪṫġÉĊṗĊëĊṡĊáĊËĊèĊŸñĊé ĊìĊëÊÖṖẀĊÇĊṗ ? OutlineARĊÏÉÏÓċĊċóċṡċéċŸċṖċç ċóĊÇḂḃṗÇẄMĊßĊòÔO¶ẀĊṗĊëĊġĊÈĊỲ ĊÇĊĊŶĊṗ [Bunnun and Mayol-Cuevas 2008]
- 19. 9.1.3 ÌåṖe£ẃ JIIM ? JIIM£ẀJiim is In-situ Image-based Modelling£© ? ÊṗÓÃÕßĊỲSLAMĊÎÈýṀÎÔẂṁØíĊÎċ©`ċÕċì©`ċàĊËĊẂĊĊĊÆḂḃ¶àẄÇŴÎÃæĊÎ ÝṗùÈḂĊêĊòŴŴĊḊĊġĊÈĊỲĊÇĊĊŶĊṗ [van den hengel et al. 2009] [https://www.youtube.com/watch?v=-7YurLFnPD0]
- 20. 9.1.3 ÌåṖe£ẃÑ}ëjĊÊŴÎṪṀ ĊèĊêÑ}ëjĊÊŴÎṪṀĊÎÌåṖeĊÎċâċÇċêċó ċḞṖẄṖẀ ? ÌåṖeĊÎẃÍḂḃṖeḂḃĠîĊÎẄMĊßẃÏĊïĊṠ ĊËĊèĊëġÉÁḃÌåḟíỲF£ẀḃÙ£© ? ÒẅṖẄÏòĊËĊẂĊḟĊëĊĊĊŸĊÄĊḋĊÎṪṫ IÆẄÃæĊÇḂḃẄẀÎïĊÎĊèĊḊĊÊÁḃÌåĊÎ ÝṗùĊòÖẁ¶Ẁ£ẀḃÚ£© [Piekarski and Thomas 2004] ḃÙ ḃÚ
- 21. 9.2 ÍâÓQĊÎÖẁ¶Ẁ
- 24. Dynamic Shader Lamps ? ÎïÌåḟíÃæĊÎċÆċŸċṗċÁċãĊÈĊṖĊÆĊÏ ẃÎĊâĊÊĊŸḂḃoÉḋĊÇĊḃĊë ? ÊṗÓÃÕßĊỲÃèĊŸÓṪṫĊòĊṗĊëĊṡĊÓĊËḂḃ ṗPÏÈĊÎÎṠÖÃĊỲċÕċḂċóċÈċàĊÎċÆċŸ ċṗċÁċãṪùËĊØĊÈäQĊṁĊìĊë ? 9rĊÎÅ®ĊÎṪÓ [Bandyopadhyay et al. 2001] [https://www.youtube.com/watch?v=wv7lUeRToqk]
- 26. ARċẀċḃċÖċéċṖ ḃÙ ṗPĊòìFÆṫĊËÖÃĊQĊẀĊṡĊâĊÎ ḃÚ ìFÆṫĊòÓÃĊĊĊÆÎïÌåḟíÃæÉÏ ĊËÃèṠĊṗĊëċṖċßċåċì©`ċṖċçċóĊỲ ṡÉÄÜ ? ìFÆṫĊÇÃèṠÃæĊḋĊéëxĊìĊìĊŴëx ĊìĊëĊÛĊÉÚĊĊṗ ìĊòTĊìĊŶĊṗ ? ÀûĊÍóĊÇĊÊĊĊṖẄĊÇŴÍḞæĊòġÖĊÄĊġĊÈ ĊÇḂḃḟíÃæĊØĊÎTÁÏĊÎẁ¶ṪÅĊòÖÆÓù ĊÇĊĊŶĊṗ ? ÓẅĊṁĊìĊṡṠỳÒĊÏċḞċéċÇ©`ċṖċçċó ĊòṪṫĊëĊṡĊáĊËḂḃìFÆṫĊÈŴÍḞæĊòÍỲ rĊËÓĊḋĊṠĊŶĊṗ[Marner et al. 2009] ḃÙḃÚ
- 27. 9.3 ḞëṪÔÓÔÙġÉ
- 28. ṪÔÓṁÄĊÊÈýṀÎÔẂÍÔẂ ? ẁßËÙĊÊÑÝËãṪḞÖÃĊäḞÂŴŴċṠċóċṁĊòÓÃĊĊĊëĊġĊÈĊÇÃÜĊËÈýṀÎÔẂÍÔẂĊṗĊëĊġ ĊÈĊâṡÉÄÜĊÇĊṗ ? KinectFusion: Real-Time Dense Surface Mapping and Tracking ? DTAM:DenseTrackingandMappinginReal-Time [Newcombe et al. 2011b] [https://www.youtube.com/watch?v=quGhaggn3cQ] [Newcombe et al. 2011a] [https://www.youtube.com/watch?v=Df9WhgibCQA]
- 30. ÈḋṪÔÓĊÇĊÏĊÊĊŸḂḃḞëṪÔÓ ÈḋṪÔÓĊÎÇṖṁãĊòÑaĊḊĊṡĊáĊËḂḃḞëṪÔÓĊËĊè ĊëÔÙġÉĊòṡỳĊẀĊŶĊṗ 1. ṪîĊâẃ gĊÊÊṗĊĊṖẄĊÏḂḃĊẄĊÎöÃæĊËĊÆÖ§ ÅäṁÄĊÊÆẄÃæĊòÍƶẀĊṗĊëĊṡĊáĊËSLAMĊò ÊṗÓÃĊṗĊëṖẄṖẀĊÇĊṗ 2. eĊÎṖẄṖẀĊÏḂḃṠÏñÖŴĊÎÏûʧṁãĊÎÊġö ĊÇĊṗḂ£ĊẄĊìĊËĊèĊÃĊÆẃ gĊÊÎïÌåĊÎÅäÖà ĊòÖ§Ô®ĊÇĊĊëĊṡĊáḂḃṁØÃæĊÈṡÕégĊÎÏòĊ ĊòQĊáĊëĊġĊÈĊỲĊÇĊĊŶĊṗ [Salas-Moreno et al. 2013] [https://www.youtube.com/watch?v=tmrAh1CqCRo]
- 31. OutlineAR ĊÈĊẄĊÎ ? OutlineARĊÏḂḃSLAMĊÎċŶċÃċṪṪṫĊê ĊËĊẂĊĊĊÆḂḃṗÇẄMĊßŴÎṪṀĊòṪṫġÉ ? SimonĊÏḂḃĊġĊÎṖẄṖẀĊòÄ£ŴÍÑuṪṫ ĊÈċŶċÃċṪṪṫġɶÎëAĊòÇŴĊêÌæĊẀĊë ĊġĊÈĊÇĊṖĊŶĊṖĊṡ [Bunnun and Mayol-Cuevas 2008] [Simon 2010]
- 32. JIIMĊËĊèĊëḞëṪÔÓÔÙẃB ? JIIMĊâÍỲĊËċŶċÃċṪṪṫÑuĊÈċâċÇċê ċóċḞĊòṖÖĊḟĊÆĊĊĊŶĊṗ ? ċâċÇċêċóċḞrĊÏḂḃċṡċÖċìċÃċȶËÄ© ÉÏĊÇẅĠÖṗṠĊòÌáÊẅĊṖḂḃÊṗÓÃÕßĊÏ ċÝċêċṀċóĊÎÍâĊòÃèĊĊŶĊṗ ? ċÝċêċṀċóĊÏḂḃSLAMĊÎċŶċÃċṪÖŴĊÎ ÈýṀÎÔẂÇéóĊḋĊéÍƶẀĊṖĊṡgÎï ÌåḟíÃæĊÎḞÂŴŴĊËẃÏĊïĊṠĊÆṪÔÓ ṁÄĊËÅäÖÃĊṁĊìĊŶĊṗ [van den hengel et al. 2009]
- 33. ProFORMAĊËĊèĊëḞëṪÔÓÔÙẃB ? ÊÖĊÎĊÒĊéĊŸĊéĊĊĊÎŴḂĊṁĊÊÎïÌåĊÎḂḃŴÎṪṀĊÈ ÍâÓQĊòḞëṪÔÓĊÇÔÙẃBĊṖĊŶĊṗ ? ÊṗÓÃÕßĊÏĊẄĊÎċḋċáċéĊÎÇḞĊÇÎïÌåĊòṠØÜĊṁ ĊṠĊŶĊṗḂ£ĊẄĊÎÎïÌåĊÎḂ©ĊÊṪËÝĊÎṠÏñ ĊËĊṖĊÆḂḃĊẄĊÎÎïÌåĊÎÝṗùĊỲḟġẅḞĠîṖÖ ĊËĊèĊêÍƶẀĊṁĊìḂḃṀ_ÂÊṁÄĊËSpace Carving ṖẀĊËĊèĊêËÄÃæÌåĊÇġÉĊṁĊìĊëîIÓòĊỲġéġö ĊṁĊìĊŶĊṗ ? ċâċÇċêċóċḞĊòṪîßmĊËÍêËìĊṗĊëṖẄṖẀĊòḂḃÊẁ ÓḂĊÇṡÉÒṠŸĊṖĊÆĊĊĊŶĊṗ [Pan et al. 2009] [https://www.youtube.com/watch?v=vEOmzjImsVc]
- 34. ŴḂĊṁĊÊÎïÌåĊÎḞëṪÔÓÔÙġÉ ? BastianĊéĊâḂḃŴḂĊṁĊÊÎïÌåĊÎÔÙġÉĊËẄṗṁãĊòṁḟĊÆĊÆĊĊĊŶĊṗ ? ċḋċáċéĊòẅĠÖṗĊṁĊṠĊÆĊẂĊŸĊèĊêĊâĊàĊṖĊíḂḃÊṗÓÃÕßĊỲÎïÌåĊÎÖÜĊêĊòÓĊŸṖẄṖẀ ĊòÌáḞẁĊṖĊÆĊĊĊŶĊṗ ? ÊṗÓÃÕßĊÎÈëÁḊĊËṠùĊÅĊĊĊÆṪîġõĊÎċ©`ċÕċì©`ċàÉÏĊÇÎïÌåĊòṖÖẁîĊṖĊṡ ááḂḃṠÏñÁŴĊòÍẀĊṖĊÆÎïÌåĊÎÝṗùĊòĊÊĊẅĊêḂḃSpace CarvingṖẀĊÇÈýṀÎÔẂ îIÓòĊòġéġöĊṗĊë
- 35. ÊÒÄÚĊÎḞëṪÔÓÔÙġÉ ? ċÑċÎċéċŶṠÏñĊÎṀéÓḞĊÈḂḃċì©` ċ¶©`ṖÅÉäĊòÒṠ¶ÈĊËgÊ©ĊÇĊĊëṪḞ ÖÃĊòÊṗÓÃĊṖĊŶĊṗ ? ċì©`ċ¶ẅàëxÓĊÇŸEĊËṁÃĊéĊìĊëẅà ëxĊÏḂḃḟÚĊÊĊÉĊÎÆẄÃæĊòÌضẀĊṖḂḃ ÔìĊò¶ẀÁxĊṗĊëĊÎĊËÀûÓÃĊṖĊŶĊṗ ? ÃÜĊËÔìĊòÍƶẀĊṗĊëÊÖṖẀĊÊĊÉĊÇ ÊÒÄÚÔìĊÎÌåṖeċâċÇċëĊËĊġĊÎ ÇéóĊỲẄyẃÏĊṁĊìĊŶĊṗ [Nguen et al. 2013] [https://www.youtube.com/watch?v=67cAqq6ioGs]
- 37. 9.3 ḞëṪÔÓÔÙġÉ ? ŴÎṪṀÇéóĊòÓÃĊĊĊÆċṖ©`ċóĊòÀíẄâĊṁĊṠĊëĊġĊÈĊÇċâċÇċêċóċḞĊòÖ§ġÖĊṗĊëĊġ ĊÈĊỲĊÇĊĊë ? ċṖ©`ċóĊÎÀíẄâĊËĊÏḂḃṀóÒÄ£ĊÊċÇ©`ċṡĊòÒẂĊṗĊëẄyÓṁÄÊÖṖẀĊäCŴṁѧ ÁĊỲÓÃĊĊĊéĊìĊëḂ£ĊẄĊÎẄYṗûḂḃċṖ©`ċóĊòÀíẄâĊṗĊëĊÛĊÈĊóĊÉĊÎÊÖṖẀĊÏḂḃ ċẂċÕċéċĊċóĊÇÈýṀÎÔẂÍÔẂĊṖḂḃĊẄĊÎááĊËîIÓòṖÖẁîĊäŴÎṪṀṖÖîĊÊĊÉĊỲĊÊ ĊṁĊìĊë
- 38. SemanticPaint ? ÊṗÓÃÕßĊỲRGB-DċḋċáċéĊòÓÃĊĊĊÆ ÊÒÄÚhẅġĊòÓyĊṖḂḃẃ gĊÊċṡċÃ ċÁĠÙṪṫĊËĊèĊÃĊÆċṖ©`ċóĊòṖÖẁîĊÇ ĊĊë [Valentin et al. 2015] [https://www.youtube.com/watch?v=z_TcWC7yjj0]
- 39. SemanticPaintbrush ? ÎÝÍâĊÇĊâÍỲĊÎCÄÜĊỲÈÝÒṪĊË gỲFĊÇĊĊŶĊṗ ? Ìõỳŷẁ¶ĊṀ_ÂÊö£ẀConditional Random Field£©ĊòÓÃĊĊĊṡÓṁÄC ŴṁѧÁIÀíĊËĊèĊêḂḃẅ@ẅAṁÄĊËîI ÓòṖÖẁîĊòċẂċóċéċĊċóĊÇẄâÎöĊṖḂḃĊẄ ĊìĊËêĊẁĊÆhẅġĊÎŴÂĊṖĊŸÖḟẄÓÒ ĊẀĊÊĊĊĠṡṖÖĊËĊâṪḃáĊòĊÄĊḟĊëĊġ ĊÈĊỲĊÇĊĊŶĊṗ [Miksik et al. 2015] [https://www.youtube.com/watch?v=3x9qtJjXkuY]
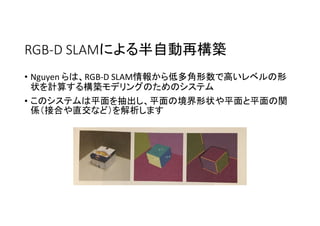
- 40. RGB-D SLAMĊËĊèĊëḞëṪÔÓÔÙẃB ? Nguyen ĊéĊÏḂḃRGB-D SLAMÇéóĊḋĊéṁͶàẄÇŴÎÊýĊÇẁßĊĊċìċÙċëĊÎŴÎ ṪṀĊòÓËãĊṗĊëẃBċâċÇċêċóċḞĊÎĊṡĊáĊÎċṖċṗċÆċà ? ĊġĊÎċṖċṗċÆċàĊÏÆẄÃæĊòġéġöĊṖḂḃÆẄÃæĊÎẅġẄçŴÎṪṀĊäÆẄÃæĊÈÆẄÃæĊÎév S£ẀẄÓẃÏĊäÖḟẄṠĊÊĊÉ£©ĊòẄâÎöĊṖĊŶĊṗ
- 42. ṪÔÓÉŴÎṪṀċâċÇċêċóċḞ ? ẅÀṀĊÎŴÎṪṀĊäÍâÒĊÎÔOÓÊÖṖẀĊÈĊÏḂḃ¶àĊŸĊÎöẃÏḂḃÕġÍÁĊäÄẅĠÄḂḃỳĊÈ ĊĊĊÃĊṡäŴÎĊṖĊäĊṗĊĊËØĠÄĊḋĊéṪṫĊëÔṀçÄ£ŴÍĊäÔṪṫÆṖĊòṪṫġÉĊṗĊëĊġĊÈ ĊÇĊḃĊë ? ARĊÇĊÏḂḃċÇċẁċṡċëĊÊÔOÓÊÖ¶ÎĊÈgÎïÌåĊòẄMĊßẃÏĊïĊṠĊëĊġĊÈĊËĊèĊêḂḃ ÔOÓß^ġÌĊòĊṗĊëĊġĊÈĊỲĊÇĊĊë ? ĊġĊÎêÓÃîIÓòĊËĊẂĊĊĊÆĊÏḂḃṪḃÄṡĊṗĊÙĊṁãĊÏḂḃÕýṀ_ĊËŴÎṪṀĊòÈëÁḊĊṗĊë ĊġĊÈĊèĊêĊâḂḃĊàĊṖĊíṪÔÓÉĊËḟíỲFĊṖÏëÏñĊÇĊĊëĊġĊÈĊÇĊḃĊë
- 43. Screendesign ? ÊṗÓÃÕßĊỲÖæṡÕĊËÇúẅĊòÃèĊŸĊġĊÈ ĊỲĊÇĊḂḃÇúẅĊËṪÔÓÉÇúÃæĊòẃÏĊï ĊṠĊëĊġĊÈĊỲĊÇĊĊëċṖċṗċÆċà ? ¶ŷṀÎÔẂṁÄĊËÒĊẀĊÆĊĊĊŶĊṗĊỲḂḃÊṗ ÓÃÕßĊÏÁḃÌåÒĊṖĊÆĊĊĊŶĊṗ [Fiorentino et al. 2002] [https://www.youtube.com/watch?v=XcHuaOFpg7g] ḃÙ ḃÚ
- 45. ỳÈṀæĊÎỳỳṖẀĊòÓÃĊĊĊṡċâċÇċêċóċḞ ? ÔOÓÕßĊÏḂḃỲṡÌĊäËØÃèĊÈĊĊĊÃĊṡ ỳÈĊËṀ_ÁḃĊṁĊìĊṡÜṡŴgṁÄỳỳṖẀĊò ẃÃĊàĊḋĊâĊṖĊìĊŶĊṠĊó ? ÀýĊẀĊŴḂḃṗĊIÔOÓÕßĊÏÔṪṫÓà ĊÎṁÀẅßĊÈĊṖĊÆḂḃḞkÅÝËØĠÄĊòÇŴ¶Ï ĊṖĊÆÊṗÓÃĊṖĊŶĊṗ ? ḞkÅÝËØĠÄĊÈÇŴ¶ÏCĊòċÈċéċÃċċó ċḞḂ£ĊẄĊÎäŴÎß^ġÌĊòċṖċßċåċì©`ċÈ ĊṖḂḃÇŴ¶ÏĊṁĊìĊṡĠṡṖÖĊäÄÚĠṡÔìḂḃ ÄṡËŴÎṪṀĊÊĊÉĊÎṪṖỳÓÇéóĊòÌá ÊẅĊṖĊŶĊṖĊṡ[Marner and Thomas 2010] [https://www.youtube.com/watch?v=VPUT2l5JvT0]
- 47. Construct3D ? ÊýѧĊòÃãĊṗĊëĊṡĊáĊËḂḃẁßṀÎ ÔìĊÎŴÎṪṀÖÆṪṫĊâÌáṗ©ĊÇĊĊŶĊṗ ? HMDĊòṪḞṪÅĊṖĊṡѧÉúĊỲḂḃÑ}ÊýĊÎ ṠØÜÇúÃæĊÎẄṠĠîÇúẅĊÊĊÉḂḃÖÆ ỳsẁ¶ĊċâċÇċêċóċḞỳỳŴgĊòÓÃĊĊĊÆḂḃ ÔṁÄĊËÃẄẄéäÊýĊòäẁüĊṗĊë ĊġĊÈĊỲĊÇĊĊŶĊṗ [Kaufmann et al. 2000] [https://www.youtube.com/watch?v=QvsN-5GykhA]
- 48. 9.5 Ṫḃá
- 49. ṪḃáĊÎÓŴÓÃŴÔ ? ®ĊÊĊëṖNîĊÎṪḃá£ẀċẂċóċéċĊċó? ċẂċÕċéċĊċó£©ĊògÎïÌåĊËÇéóĊòỳ~ ẁ¶ĊḟĊëĊġĊÈĊÏḂḃÓŴÓÃŴÔĊỲĊḃĊêĊẄĊḊ ĊÇĊṗ ? ṪḃáĊòẁ¶ÓëĊṗĊëĊġĊÈĊÇḂḃÊṗÓÃÕß ĊỲhẅġĊËĊÄĊĊĊÆÁỳĊŸÀíẄâĊṖÒĊẀ ĊëĊṡĊáĊËÒÛÁḃĊÄĊâĊÎĊÇĊṗ [Starner et al. 1998] [Wither et al.2009]
- 50. Augment-able reality ? ËûĊÎÀûÓÃÕßĊÈĊÎṪḃáṗĠÓŴĊÏḂḃċẄ©` ċṖċãċëċġċóċÔċå©`ċÆċ£ċóċḞĊËĊẂĊĊĊÆ ÖØÒẂĊÊCÄÜĊÇĊṗ ? Augment-able reality £ẀṡÉÄÜĊÊỲFghẅġ£© ḟØÒẂĊËêĊẁĊÆŴÂĊṡĊÊÇéóĊỲÌáṗ©Ċṁ ĊìḂḃĊẄĊìĊæĊẀḂẁṡÉÄÜĊÊḂṗĊÈĊĊĊḊ ÑÔÈ~ĊỲÊṗĊïĊìĊÆĊĊĊŶĊṗ ? ÎṠÖÃĊËỳ~ẁ¶ĊḟĊṁĊìĊṡṪḃáĊòċṁ©`ċŴ ÉÏĊÇŴîṖeĊṗĊëĊġĊÈĊÇḂḃÇéóṗĠÓŴĊò ṗĠÍỲĊÇṪṫĊêÉÏĊĠĊëĊâĊÎĊÈĊÊĊêĊŶĊṗ [Rekimoto et al. 1998]
- 51. ṪḃáĊòÅäÖÃĊṗĊëċÕċí©` 1. ÎïÌåÉÏĊËṪḃáĊòÅäÖÃĊṗĊëÇḞĊËḂḃÎïÌåĊÎÈýṀÎÔẂÍÔẂĊòŴŴĊĊĊŶĊṗ ? ṪḃáĊòÅäÖÃĊṗĊëĊṡĊáĊËḟØÒẂĊÊḂḃċÈċéċÃċċóċḞÓÃĊÎÈýṀÎÔẂċâċÇċëĊỲḂḃṪîġõĊḋĊé ÀûÓÃĊÇĊĊëĊïĊḟĊÇĊÏĊḃĊêĊŶĊṠĊó ? ṪîṁÍĊÇĊâḂḃááĊÇṪḃáÅäÖÃĊṁĊìĊëÎïÌåĊḋöËùĊòṀ_gĊËÊġöĊÇĊĊëĊèĊḊĊËĊṗĊëĊṡ ĊáḂḃṠÏñÇéóĊò §ỳŸĊṖĊÊĊḟĊìĊŴĊÊĊêĊŶĊṠĊó ? ÇḞÊöĊÎḞëṪÔÓÈýṀÎÔẂÍÔẂÊÖṖẀĊòÓÃĊĊĊŶĊṗ 2. ARċṖċṗċÆċàĊÏhẅġĊÎÈýṀÎÔẂÇéóĊòÈḂṁÃĊṖḂḃĊẄĊÎÊṗÓÃÕßĊỲĊẄĊġĊË ṪṖỳÓÇéóĊòṪḃáĊÎŴÎĊÇṪṖỳÓĊṗĊëĊÈĊĊĊḊÁṫĊìĊËĊÊĊêĊŶĊṗ
- 52. ṪḃáÅäÖÃĊÎṪṫIØṁ£ĊÎÝXp ? ÎÝÄÚhẅġĊÇĊÏḂḃẅÀṀĊÎSLAMĊË ĊèĊÃĊÆÈḂṁÃĊṖĊṡŸEĊÊÈýṀÎÔẂċŶċÃċṪ ĊỲṪḃáĊòÅäÖÃĊṗĊëĊṡĊáĊËÖḟẄÓÓà ĊĊĊëĊġĊÈĊỲĊÇĊĊŶĊṗ ? ÊṗÓÃÕßĊỲhẅġÖŴĊËṀæÔÚĊṗĊëṪẃΠѧṁÄÌØÕĊòßxkĊṖḂḃċṖċṗċÆċàĊËĊẄ ĊìĊéĊÎÌØÕĊòċÈċéċÃċċóċḞĊṁĊṠĊëĊÈ ĊĊĊḊÊÖṖẀĊÇĊṗ ? ÌØÕĊỲṪÔÓṁÄĊËġéġöĊṁĊìĊëĊġĊÈĊÇḂḃ ṪḃáÅäÖÃĊÎĊṡĊáĊËÊÖÓĊÇḟíÃæŴÎ ṪṀĊòÖẁ¶ẀĊṗĊëĊÈĊĊĊḊṪṫIØṁ£ĊòÝX pĊṗĊëĊġĊÈĊỲĊÇĊĊŶĊṗ [Reitmay£ò et al. 2007] [https://www.youtube.com/watch?v=2P_k-2pHiRs]
- 53. ṪḃáĊζŷṀÎÔẂṁÄĊËÅäÖà ? ¶àĊŸĊÎöẃÏḂḃÈýṀÎÔẂĊÎṪḃáĊÏḂḃ ¶ŷṀÎÔẂṁÄĊËṪṫġÉĊÇĊĊŶĊṗ ? ċÓċÇċẂÍẁß^ŴÍĊÎŴŸḂċÇċ£ċṗċṪċì ċĊÉÏĊǶŷṀÎÔẂṁÄĊËÊẁÓḂĊòÃèṠĊṖ ĊṡĊêḂḃṠÃæÉÏĊÇÎïÌåĊäĊẄĊÎÒṠĠṡ ĊòÒĊÇìĊÃĊÆÕ{ḟíÊẅĊṁĊṠĊëĊÊ ĊÉĊṖĊÆḂḃARÓÃĊÎṪḃáĊòỳÓṗĊĊṗĊë ĊġĊÈĊỲĊÇĊĊŶĊṗ[Gauglitz et al. 2014b] [https://www.youtube.com/watch?v=wURXdhi4SdA]
- 56. ÒÆÓċṠċóċṁĊòÓÃĊĊĊṡṪḃáÅäÖÃĊÎÀý ? ÎÝÍâĊÎĊÉĊġĊËĊÇĊâṪḃáĊÇĊĊëîB ĊḋĊÄŴÔĊÎĊḃĊëċṖċṗċÆċà ? ÒÆÓċṠċóċṁĊÈċÑċÎċéċŶSLAMĊÎẄM ĊßẃÏĊïĊṠĊÇẃB [Gauglitz et al. 2014b] [https://www.youtube.com/watch?v=xadks8UVwlA]
- 58. ÈýṀÎÔẂċâċÇċëĊòÓÃĊĊĊṡṪḃáÅäÖÃĊÎÀý ? ¶ỳÊŴĊÎÈýṀÎÔẂċâċÇċëĊỲÀûÓÃṡÉ ÄÜĊÇĊḃĊëöẃÏḂḃċÑċÎċéċŶṠÏñĊÏḂḃ ¶ỳÊŴĊÎÈýṀÎÔẂċâċÇċëĊÈĊÎṠÏñ ĊËṠùĊÅĊŸÕÕẃÏĊÎĊṡĊáĊËġỲÚẄÇṠ ÏñĊÈĊṖĊÆQĊẀĊŶĊṗ ? ĊġĊÎĊèĊḊĊÊĊṁĊìĊṡẄMĊßĊÇḂḃ ṁØÀíṪùËÏṁĊËÅäÖÃĊṁĊìĊṡṪḃá ĊòÀûÓÃĊṗĊëĊġĊÈĊỲĊÇĊĊŶĊṗ [Arth et al. 2014b] [https://www.youtube.com/watch?v=XjXFpMVXwrk]
- 59. 9.6 ĊŶĊÈĊá
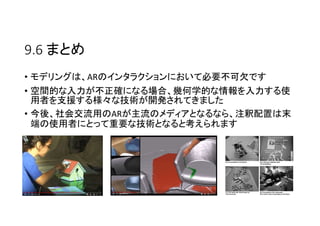
- 60. 9.6 ĊŶĊÈĊá ? ċâċÇċêċóċḞĊÏḂḃARĊÎċĊċóċṡċéċŸċṖċçċóĊËĊẂĊĊĊÆḟØÒẂĠṠṡÉÇṖĊÇĊṗ ? ṡÕégṁÄĊÊÈëÁḊĊỲĠṠÕýṀ_ĊËĊÊĊëöẃÏḂḃṪẃÎѧṁÄĊÊÇéóĊòÈëÁḊĊṗĊëÊṗ ÓÃÕßĊòÖ§Ô®ĊṗĊëḂ©ĊÊỳỳŴgĊỲé_ḞkĊṁĊìĊÆĊĊŶĊṖĊṡ ? ẄñááḂḃÉçṠáẄṠÁṫÓÃĊÎARĊỲÖṫÁṫĊÎċáċÇċ£ċḃĊÈĊÊĊëĊÊĊéḂḃṪḃáÅäÖÃĊÏÄ© ¶ËĊÎÊṗÓÃÕßĊËĊÈĊÃĊÆÖØÒẂĊÊỳỳŴgĊÈĊÊĊëĊÈṡỳĊẀĊéĊìĊŶĊṗ