
















Arduino Cloud IoT§»Node-Red§«RumiCar§Ú“䧮§ÎªØ§π§Î
- 1. Arduino IoT Cloud§»Node-RED§« RumiCar•«©`•ø§Ú“䧮§ÎªØ§π§Î æÆ…œ Ô˛(@henjin01_Fab) °æenebular developers•≥•È•Ð°ø•”•∏•Â•¢•Î•◊•Ì•∞•È•þ•Û•∞Ωª¡˜ª· 2021/11/02(ª)
- 2. ◊‘º∫ΩBΩÈ √˚«∞: æÆ…œ Ô˛(Minoru INOUE) ≥ˆ√ªœ»: •≥•þ•Â•À•∆•£°∞§Ê§Î•·•´•»•Ì°± Facebook: minoru.inoue.90 Twitter : @henjin01_Fab ◊ÓΩ¸§œIoT§ •Õ•ø§«µ«âا∑§∆§§§ §´§√§ø°£ § §Œ§«º»¥Ê§Œ•·•´§Úüo¿Ì ∏¿ÌIoTªØ§∑§Þ§π
- 8. ΩÒªÿ§ŒNode-RED§Œ»°§ÍíQ§§ enebular§Ú”√§§§∆heroku§À•«•◊•Ì•§§∑§∆ π”√ & Arduino IoT Cloud”√Õ‚≤ø•’•Ì©`§Ú•§•Û•π•»©`•Î rumicar.herokuapp.com/ •«•◊•Ì•§ @arduino/ node-red-contrib-arduino-iot-cloud skip•∑©`•»
- 12. ΩÒªÿ§ŒRumicar - ToF•ª•Û•µ£∫VL53L0x - •‚©`•ø©`•…•È•§•–£∫DRV8833 - ÷∆”˘•Ð©`•…£∫Arduino MKR WIFI 1010 - §§§±§À§®Ðáã∫•¿•§•Ω©`§Œ600É“•È•∏•≥•Û - •’•Ï©`•ý£∫MDF/•¢•Ø•Í•Î§Ú•Ï©`•∂©`•´•√•»§∑§∆◊˜≥…
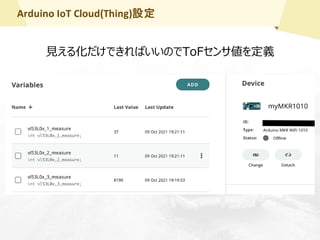
- 13. Rumicar±æçÀﯧ≠Þz§ý•·•§•Û•≥©`•… Arduino IoT Cloud§ÿ§ŒΩ”æA•≥©`•…§œ◊‘Ñ”◊˜≥… §´§ƒ°¢•≥©`•…§Œ÷–…̧œÕ®≥£Rumicar§»¥Û≤Ó§ §∑ #include "RumiCar.h" int before_s1; int s0,s1, s2; int ibound; #include "thingProperties.h" void setup() { Serial.begin(9600); delay(1500); initProperties(); ArduinoCloud.begin(ArduinoIoTPreferredConnectio n); RC_setup(); ibound = 250; before_s1 = 0; setDebugMessageLevel(2); ArduinoCloud.printDebugInfo(); } int sat_value(unsigned intnum){ if(num >= 255){ return 255; } return num; } void loop() { ArduinoCloud.update(); s0=sensor0.readRangeSingleMillimeters(); s1=sensor1.readRangeSingleMillimeters(); s2=sensor2.readRangeSingleMillimeters(); Serial.print("Sensor0:"); Serial.print(s0); vl53L0x_1_measure=s0; Serial.print(" Sensor1:"); Serial.print(s1); vl53L0x_2_measure=s1; Serial.print(" Sensor2:"); Serial.println(s2); vl53L0x_3_measure=s2; if(s1<=100){ if(s0 < s2-10 ){ RC_steer(LEFT); }else if(s0 > s2+10){ RC_steer(RIGHT); } RC_drive(REVERSE,sat_value(300-s1)); return; }else if (s1<=150){ RC_drive(FORWARD,sat_value(s1+50)); }else if(s1<=250){ RC_drive(FORWARD,sat_value(s1*4/5)); }else{ RC_drive(FORWARD,255); } if(s0 < s2+10 && s0 > s2-10){ return; } if(s0>s2){ RC_steer(LEFT); }else if(s2>s0){ RC_steer(RIGHT); } } void onVl53L0x3MeasureChange() {} void onVl53L0x1MeasureChange() {} void onVl53L0x2MeasureChange() {} Green Code:◊‘Ñ”◊˜≥…•≥©`•… Blue Code :Rumicar◊∑”õ•≥©`•… Red Code :Arduino IoT Cloud§ÀÇé§Ú∂…§π•≥©`•…
- 17. §Þ§»§· º»¥Ê•≥©`•…§Ú¡˜”√§∑§ƒ§ƒRumicar§Ú•Õ•√•»§Àøé§≤§È§Ï§ø - Arduino IoT Cloud§œª˘±æ•Ø•Í•√•Ø≤Ÿ◊˜§Œ§þ - Node-RED•’•Ì©`§œ•µ•∏•ß•π•»§µ§Ï§ø‘O∂®§Ú§Ω§Œ§Þ§Þþxík§π§Î§¿§± heroku•¿•√•∑•Â•Ð©`•…§À§Ω§Œ§Þ§Þ§ƒ§ §§§«ΩK§Ô§Í - ◊‘∑÷§´§Èº”§®§øArduino•≥©`•…§œ3––§¿§± §»§À§´§Ø ÷ðX§π§Æ§Î°£ ÷ðX§ §Œ§Àø…”√–‘•‰•–§§ - API•≠©`»°µ√··§œHTTPΩU”…§«Ñe•µ©`•”•π§»þB–Øø…ƒÐ - º»¥Ê§ŒArduino•≥©`•…§œ§€§Ð¡˜”√ø…ƒÐ