Artificial Neural Networks fuzzy logic
ŌĆóDownload as PPTX, PDFŌĆó
3 likesŌĆó2,890 views

Fuzzy logic control systems can be used to control the speed of automated automobiles based on obstacles sensed. Fuzzy logic is well-suited for control applications like automated driving where there is ambiguity. For more complex driving systems, fuzzy logic provides a powerful and robust method of control compared to mathematical models or neural networks. A fuzzy logic system for automated vehicle speed control uses sensors to detect obstacles and membership functions to characterize fuzzy sets that define the relationship between speed and sensed distance to determine appropriate defuzzified speed values. This fuzzy control system can help prevent accidents by relieving driver tension.








Artificial Neural Networks fuzzy logic
- 1. ARTIFICIAL NEURAL NETWORKS FUZZY LOGIC (AUTOMATED AUTOMOBILES)
- 2. Introduction ’āś Fuzzy Logic control system is used to control the speed of the car based on the obstacle sensed. ’āś Fuzzy logic is best suited for control applications, such as temperature control, traffic control or process control.
- 3. Fuzzy Vs. Probability ’āś Fuzziness describes the ambiguity of an event. ’āś whereas probability describes the uncertainty in the occurrence of the event.
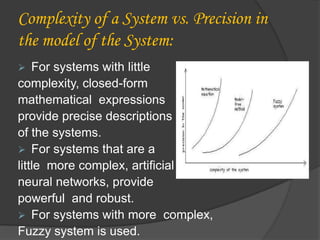
- 4. Complexity of a System vs. Precision in the model of the System: ’āś For systems with little complexity, closed-form mathematical expressions provide precise descriptions of the systems. ’āś For systems that are a little more complex, artificial neural networks, provide powerful and robust. ’āś For systems with more complex, Fuzzy system is used.
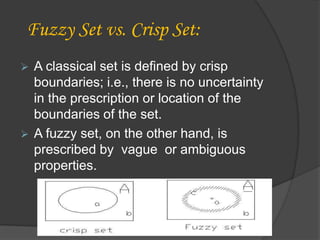
- 5. Fuzzy Set vs. Crisp Set: ’āś A classical set is defined by crisp boundaries; i.e., there is no uncertainty in the prescription or location of the boundaries of the set. ’āś A fuzzy set, on the other hand, is prescribed by vague or ambiguous properties.
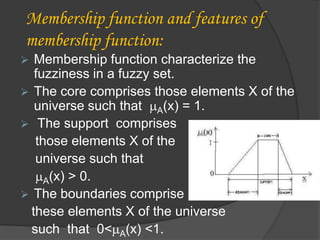
- 6. Membership function and features of membership function: ’āś Membership function characterize the fuzziness in a fuzzy set. ’āś The core comprises those elements X of the universe such that A(x) = 1. ’āś The support comprises those elements X of the universe such that A(x) > 0. ’āś The boundaries comprise these elements X of the universe such that 0< A(x) <1.
- 7. Fuzzification and Defuzzification ’āś Fuzzification is the process of making a crisp quantity fuzzy. ’āś Defuzzification is the conversion of a fuzzy quantity to a precise quantity.
- 8. Fuzzy Logic Control System ’āś Obstacle Sensor Unit: The car consists of a sensor in the front panel to sense the presence of the obstacle.
- 9. Sensing Distance ’āś The sensing distance depends upon the speed of the car and the speed can be controlled by gradual anti skid braking system. ’āś The speed of the car is taken as the input and the distance sensed by the sensor is controlled.
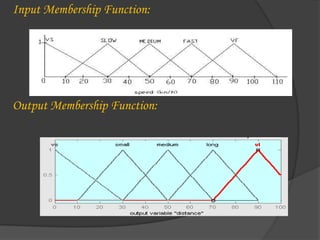
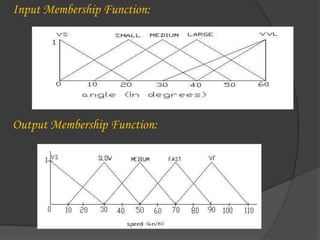
- 10. Input Membership Function: Output Membership Function:
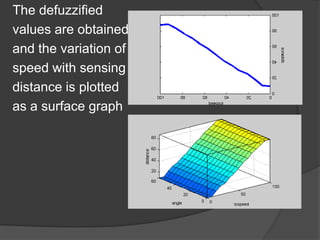
- 11. The defuzzified values are obtained and the variation of speed with sensing distance is plotted as a surface graph
- 12. Speed Control ’āś Speed breaker
- 13. ’āś Fly Over
- 14. The angle is taken as the input and output speed is controlled.
- 15. Input Membership Function: Output Membership Function:
- 16. From the graph it is clear that the speed becomes zero when the angle of the obstacle is greater than 60 .
- 17. This fuzzy control can be extended to rear sensing by placing a sensor at the back side of the car
- 18. Conclusion: ’āś The fuzzy logic control system can relieve the driver from tension and can prevent accidents. ’āś This fuzzy control unit when fitted in all the cars result in an accident free world.