Bachelor Presentation
?
0 likes?1,607 views

ż│ż╬źūźņź╝ź¾źŲ®`źĘźńź¾żŽ╦Įż╬č¦▓┐ż╬ż╚żŁż╬ūõśI░k▒ĒżŪż╣ĪŻ į¬ż╬źšźĪźżźļż¼ė¹żĘż▒żņżąĪóźß®`źļżŪż┤▀BĮjż»ż└żĄżżĪŻ



![4 ČÓĮŪą╬ż╬Į³╦ŲäI└Ē
? 4.2 ApproxPoly
? Į³╦ŲäI└Ē?Douglas-Peuckerźóźļź┤źĻź║źÓ (ŠĆż╬ź╗ź░źßź¾źŲ®`źĘ
źńź¾)
? Į³╦ŲŪ·ŠĆż½żķę╗Č©ŠÓļx─┌ż╦į¬ż╬ČÓĮŪą╬ż“śŗ│╔ż╣żļĄŃ
ż¼╚½żŲż¬żĄż▐ż├ż┐ł÷║Žż╦źóźļź┤źĻź║źÓż¼ĮK┴╦
? ūŅĮKĄ─ż╩Į³╦ŲŪ·ŠĆż¼øQČ©
╚²ĮŪą╬ż╦
Į³╦ŲżĘ
ż┐ŻĪ
Douglas-Peucker
źóźļź┤źĻź║źÓ
[2]Į±Š«═žę▓(2006), äėĄ─ż╦├Ķ╗ŁĄŃ╩²ż“┐╝æ]żĘż┐ĘŪ═¼Ų┌╩²éÄĄžćĒ▒Ē╩ŠźĘź╣źŲźÓż╬įO
ėŗż╚īgū░, ŹuĖ∙┤¾č¦ Št║Ž└Ē╣żč¦▓┐ ╩²└Ē?Ūķł¾źĘź╣źŲźÓč¦┐Ų ūõśIšō](https://image.slidesharecdn.com/fahmib4presentationslideshare-111102051139-phpapp02/85/Bachelor-Presentation-16-320.jpg)


Bachelor Presentation
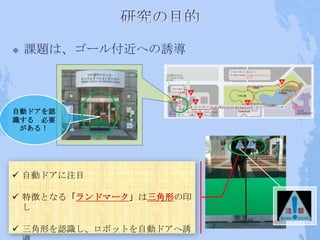
- 1. ŲĮ│╔Ż▓Ż▓─ĻČ╚ ūõśI░k▒Ē╗ß ╚║±R┤¾č¦╣żč¦▓┐Ūķł¾╣żč¦┐Ų ╠½╠’蹊┐╩ę 4─Ļ DZULFAHMI
- 2. ? 蹊┐ż╬▒│Š░ ? ż─ż»żąź┴źŃźņź¾źĖ2010 ? 蹊┐ż╬─┐Ą─ ? ČÓĮŪą╬╚Ž╩Čż╬źóźļź┤źĻź║źÓ ? Ė„äI└Ēż╬įö╝Ü ? īg“Y?ĮY╣¹ ? ż▐ż╚żß
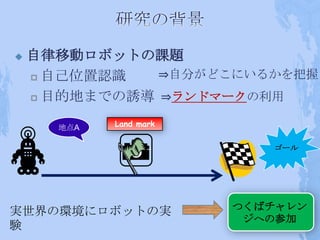
- 4. ? ūį┬╔ęŲäėźĒź▄ź├ź╚ż╬šnŅ} ? ūį╝║╬╗ų├╚Ž╩Č ?ūįĘųż¼ż╔ż│ż╦żżżļż½ż“░č╬š ? ─┐Ą─Ąžż▐żŪż╬šTī¦ ?źķź¾ź╔ź▐®`ź»ż╬└¹ė├ ĄžĄŃA Land mark ź┤®`źļ īg╩└Įńż╬ŁhŠ│ż╦źĒź▄ź├ź╚ż╬īg ż─ż»żąź┴źŃźņź¾ źĖżžż╬▓╬╝ė “Y
- 5. ? ╚╦ż╚źĒź▄ź├ź╚ ż¼ ╣▓┤µż╣żļ ╔ń╗ßżž ? ĪĖ░▓╚½Ī╣ż½ż─ ĪĖ┤_īgĪ╣ż╦äė ż» FINISH START ? ż─ż»żą╩ą ųąčļ╣½ł@1.1km
- 6. ĘŪ│Ż═Żų╣ ź½źß źķ źčźĮź│ź¾ ź©ź¾ź│®` ź└ ųŲė∙ LRF ź½źßźķż“└¹ė├żĘĪóīg“Yż“ąąż”Ż║ ? ČÓĮŪą╬╚Ž╩Čż╬äI└Ē ? ’LŠ░ź▐ź├ź┴ź¾ź░ż╦żĶżļūį╝║╬╗ų├═Ų Č© ? Hough ēõōQż“ė├żżż┐▀MąąĘĮŽ“╦Ń│÷
- 7. ? šnŅ}żŽĪóź┤®`źļĖČĮ³żžż╬šTī¦ ūįäėź╔źóż“šJ ūRż╣żļ ▒žę¬ ż¼żóżļŻĪ ? ūįäėź╔źóż╦ūó─┐ ? ╠žÅšż╚ż╩żļĪĖźķź¾ź╔ź▐®`ź»Ī╣żŽ╚²ĮŪą╬ż╬ėĪ żĘ ? ╚²ĮŪą╬ż“╚Ž╩ČżĘĪóźĒź▄ź├ź╚ż“ūįäėź╔źóżžšT
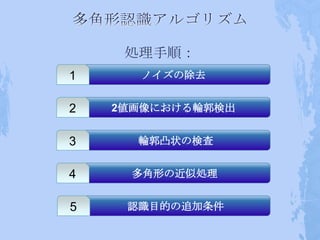
- 8. äI└Ē╩ųĒśŻ║ 1 ź╬źżź║ż╬│²╚ź 2 2éÄ╗ŁŽ±ż╦ż¬ż▒żļ▌å╣∙Ś╩│÷ 3 ▌å╣∙═╣ū┤ż╬Ś╩¢╦ 4 ČÓĮŪą╬ż╬Į³╦ŲäI└Ē 5 ╚Ž╩Č─┐Ą─ż╬ūĘ╝ė╠§╝■
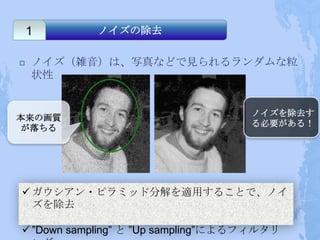
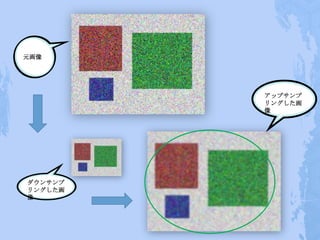
- 9. 1 ź╬źżź║ż╬│²╚ź ? ź╬źżź║Ż©ļj궯®żŽĪóą┤šµż╩ż╔żŪęŖżķżņżļźķź¾ź└źÓż╩┴Ż ū┤ąį ź╬źżź║ż“│²╚źż╣ ▒Š└┤ż╬╗Ł┘| żļ▒žę¬ż¼żóżļŻĪ ż¼┬õż┴żļ ? ź¼ź”źĘźóź¾?źįźķź▀ź├ź╔ĘųĮŌż“▀mė├ż╣żļż│ż╚żŪĪóź╬źż ź║ż“│²╚ź ? Ī▒Down samplingĪ▒ ż╚ Ī▒Up samplingĪ▒ż╦żĶżļźšźŻźļź┐źĻ
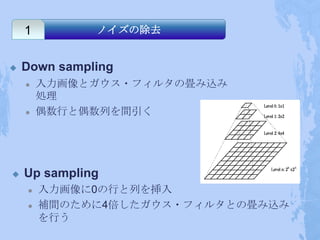
- 10. 1 ź╬źżź║ż╬│²╚ź ? Down sampling ? ╚ļ┴”╗ŁŽ±ż╚ź¼ź”ź╣?źšźŻźļź┐ż╬«Æż▀▐zż▀ äI└Ē ? ┼╝╩²ąąż╚┼╝╩²┴ąż“ķgę²ż» ? Up sampling ? ╚ļ┴”╗ŁŽ±ż╦0ż╬ąąż╚┴ąż“ÆĘ╚ļ ? čaķgż╬ż┐żßż╦4▒ȿʿ┐ź¼ź”ź╣?źšźŻźļź┐ż╚ż╬«Æż▀▐zż▀ ż“ąąż”
- 11. į¬╗ŁŽ± źóź├źūźĄź¾źū źĻź¾ź░żĘż┐╗Ł Ž± ź└ź”ź¾źĄź¾źū źĻź¾ź░żĘż┐╗Ł Ž±
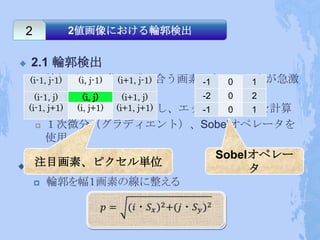
- 12. 2 2éÄ╗ŁŽ±ż╦ż¬ż▒żļ▌å╣∙Ś╩│÷ ? 2.1 ▌å╣∙Ś╩│÷ (i-1,▌å╣∙Ż©ź©ź├źĖŻ®?ļOżĻ║Žż”╗Ł╦žż╬╔½?├„żļżĄż¼╝▒╝ż ? j-1) (i, j-1) (i+1, j-1) -1 0 1 ż╦ēõ╗»żĘżŲżżżļ▓┐Ęų (i-1, j) (i, j) (i+1, j) -2 0 2 (i-1,ź░źņźżź╣ź▒®`źļż╦ēõōQżĘĪóź©ź├źĖż╬ÅŖČ╚(p)ż“ėŗ╦Ń ? j+1) (i, j+1) (i+1, j+1) -1 0 1 ? Ż▒┤╬╬óĘųŻ©ź░źķźŪźŻź©ź¾ź╚Ż®ĪóSobelź¬ź┌źņ®`ź┐ż“ ╩╣ė├ Sobelź¬ź┌źņ®` ūó─┐╗Ł╦žĪóźįź»ź╗źļģg╬╗ ź┐
- 13. 2 2éÄ╗ŁŽ±ż╦ż¬ż▒żļ▌å╣∙Ś╩│÷ į¬╗ŁŽ± ▌å╣∙Ś╩│÷ ╝ÜŠĆ╗»
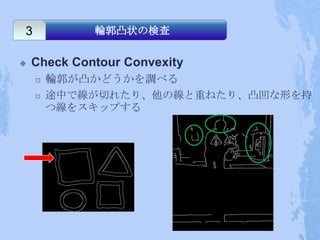
- 14. 3 ▌å╣∙═╣ū┤ż╬Ś╩¢╦ ? Check Contour Convexity ? ▌å╣∙ż¼═╣ż½ż╔ż”ż½ż“š{ż┘żļ ? ═ŠųążŪŠĆż¼Ūążņż┐żĻĪó╦¹ż╬ŠĆż╚ųžż═ż┐żĻĪó═╣░╝ż╩ą╬ż“│ų ż─ŠĆż“ź╣źŁź├źūż╣żļ
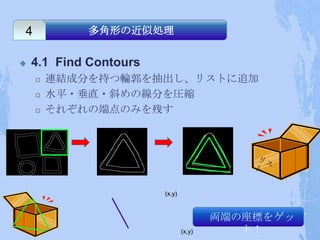
- 15. 4 ČÓĮŪą╬ż╬Į³╦ŲäI└Ē ? 4.1 Find Contours ? ▀BĮY│╔Ęųż“│ųż─▌å╣∙ż“│ķ│÷żĘĪóźĻź╣ź╚ż╦ūĘ╝ė ? ╦«ŲĮ?┤╣ų▒?ą▒żßż╬ŠĆĘųż“łR┐s ? żĮżņżŠżņż╬Č╦ĄŃż╬ż▀ż“▓ąż╣ (x,y) üIČ╦ż╬ū∙ś╦ż“ź▓ź├ (x,y) ź╚ŻĪ
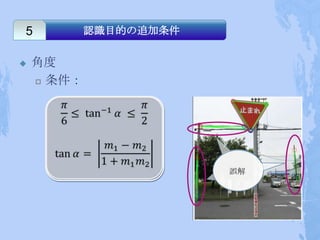
- 16. 4 ČÓĮŪą╬ż╬Į³╦ŲäI└Ē ? 4.2 ApproxPoly ? Į³╦ŲäI└Ē?Douglas-Peuckerźóźļź┤źĻź║źÓ (ŠĆż╬ź╗ź░źßź¾źŲ®`źĘ źńź¾) ? Į³╦ŲŪ·ŠĆż½żķę╗Č©ŠÓļx─┌ż╦į¬ż╬ČÓĮŪą╬ż“śŗ│╔ż╣żļĄŃ ż¼╚½żŲż¬żĄż▐ż├ż┐ł÷║Žż╦źóźļź┤źĻź║źÓż¼ĮK┴╦ ? ūŅĮKĄ─ż╩Į³╦ŲŪ·ŠĆż¼øQČ© ╚²ĮŪą╬ż╦ Į³╦ŲżĘ ż┐ŻĪ Douglas-Peucker źóźļź┤źĻź║źÓ [2]Į±Š«═žę▓(2006), äėĄ─ż╦├Ķ╗ŁĄŃ╩²ż“┐╝æ]żĘż┐ĘŪ═¼Ų┌╩²éÄĄžćĒ▒Ē╩ŠźĘź╣źŲźÓż╬įO ėŗż╚īgū░, ŹuĖ∙┤¾č¦ Št║Ž└Ē╣żč¦▓┐ ╩²└Ē?Ūķł¾źĘź╣źŲźÓč¦┐Ų ūõśIšō
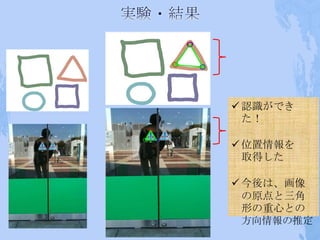
- 17. 5 ╚Ž╩Č─┐Ą─ż╬ūĘ╝ė╠§╝■ ? ĮŪČ╚ ? ╠§╝■Ż║ š`ĮŌ
- 18. ? ╚Ž╩Čż¼żŪżŁ ż┐ŻĪ ? ╬╗ų├Ūķł¾ż“ ╚ĪĄ├żĘż┐ ? Į±ßßżŽĪó╗ŁŽ± ż╬įŁĄŃż╚╚²ĮŪ ą╬ż╬ųžą─ż╚ż╬ ĘĮŽ“Ūķł¾ż╬═ŲČ©
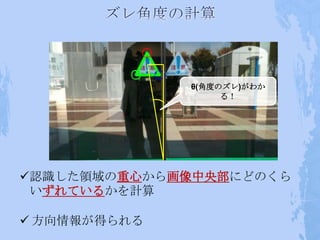
- 19. ”╚(ĮŪČ╚ż╬ź║źņ)ż¼ż’ż½ żļŻĪ ?╚Ž╩ȿʿ┐ŅIė“ż╬ųžą─ż½żķ╗ŁŽ±ųąčļ▓┐ż╦ż╔ż╬ż»żķ żżż║żņżŲżżżļż½ż“ėŗ╦Ń ? ĘĮŽ“Ūķł¾ż¼Ą├żķżņżļ
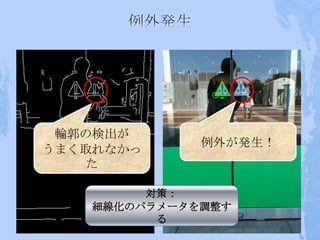
- 20. ┬ų╣∙ż╬Ś╩│÷ż¼ └²═Ōż¼░k╔·ŻĪ ż”ż▐ż»╚Īżņż╩ż½ż├ ż┐ īØ▓▀Ż║ ╝ÜŠĆ╗»ż╬źčźķźß®`ź┐ż“š{š¹ż╣ żļ
- 21. ╚Ž╩Č ╚Ž╩Č
- 22. ╚Ž╩Č ╚Ž╩Č ╚Ž╩Č ╚Ž╩Č
- 23. ? ż▐ż╚żß ? ╗ŁŽ±─┌ż╦żóżļ╬’╠Õż╬▌å╣∙ż╚╚Ž╩Č─┐Ą─ż╬ą╬ū┤ Ż©╚²ĮŪ ą╬Ż®ż╚ż╬ŅÉ╦ŲČ╚ż¼ź▐ź├ź┴ź¾ź░żĘż┐ż│ż╚ż“┤_šJżĘż┐ ĪŻ ? Į±ßßż╬šnŅ} ? š`╚Ž╩Čżžż╬īØÅĻ ? ╗Ł┘|ż¼Ą═żż╗ŁŽ±ż╦ż¬ż▒żļ╚Ž╩ČŠ½Č╚ż╬Ž“╔Ž ? └┤─ĻČ╚ż╬ż─ż»żąź┴źŃźņź¾źĖżŪīgė├╗»ż╣żļż┐żßż╦ ĪóČÓż»ż╬ū▀ąąīg“Yż“ż│ż╩ż╣