Bionic Hand
0 likes94 views

The bionic hand is a superpower of our defenders, with wide cover for all who have lost their limbs and need it. It includes some criteria to reduce the cost of prosthetics and the possibility of picking up small things and working with the laptop.
































More Related Content
Similar to Bionic Hand (20)
Recently uploaded (20)











Bionic Hand
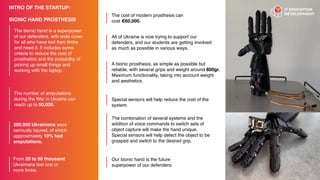
- 1. Special sensors will help reduce the cost of the system. The combination of several systems and the addition of voice commands to switch sets of object capture will make the hand unique. Special sensors will help detect the object to be grasped and switch to the desired grip. INTRO OF THE STARTUP: BIONIC HAND PROSTHESIS The bionic hand is a superpower of our defenders, with wide cover for all who have lost their limbs and need it. It includes some criteria to reduce the cost of prosthetics and the possibility of picking up small things and working with the laptop. The number of amputations during the War in Ukraine can reach up to 50,000. 200,000 Ukrainians were seriously injured, of which approximately 10% had amputations. From 20 to 50 thousand Ukrainians lost one or more limbs. The cost of modern prosthesis can cost âŽ60,000. All of Ukraine is now trying to support our defenders, and our students are getting involved as much as possible in various ways. A bionic prosthesis, as simple as possible but reliable, with several grips and weight around 800gr. Maximum functionality, taking into account weight and aesthetics. Our bionic hand is the future superpower of our defenders.
- 2. Functions of the bionic hand The prosthesis is a myoelectric robotic with a camera and a real-time object recognition model. âĒ with the help of built-in elements of arti fi cial intelligence, automatic selection and recognition of captured objects is carried out âĒ based on the recognition results, a grip algorithm is calculated for each object âĒ control of BPR using pre-con fi gured algorithms of behaviour with objects. âĒ The system can work completely autonomously without connecting to the network; if necessary, you can use a model in the cloud to improve recognition quality or add new functions. âĒ the possibility of using voice commands âĒ simple implementation using a publicly available element base. Differences from existing systems and advantages: âĒThe cost of the proposed implementation is several times lower than the existing solutions on the market, as it involves the use of standard and easily accessible mechanisms and microcontrollers, as well as the possibility of printing on 3D printers of general use. âĒUnlike solutions that require a device to be connected to the network to use AI, the proposed solution is autonomous. âĒIndependence from the surviving hand (possibility of using two prostheses simultaneously by one person). Most existing solutions on the market lack autonomy and require using the surviving hand to place the thumb in the desired position, turn the hand, and switch grip modes (through the interface integrated into the case or mobile application). This complicates and slows the speed of work, and for people who have both limbs amputated, it completely makes it impossible to use the provided functions.
- 3. Agenda THE TEAM Anatoliy Boyko Partnership Lead Prof Alexander Rolik Head of the Robotics laboratory Oleksandra Novikova Project Coordinator International Projects / Novikova Agency Communications Oksana Lovochkina Project Lead Shynkevych Mykola Stepan Korol Developer of the Bionic Hand Olena Khalus Deputy Dean of the Faculty of Informatics and Computer Engineering of the Kyiv Polytechnic Institute Yehor Sklyarov Presentation creator Yevheniia Boichuk Graphic designer Developer