『BrandSafe はてな』のアドベリフィケーションのしくみ
?
6 likes?9,552 views

http://www.slideshare.net/oarat/brand-42816575 の Hatena Engineer Seminar #5 版


![AdaBoost [’95 Freund, Schapire]
特徴
? 弱分類器の重みと閾値を自動的に決定
? 弱分類器は弱すぎなければなんでもよい
? 精度が 50%以上なら全体精度も向上
? いろんな弱分類器をいい具合に組み合わせ可能
原理
? 入力にも重みを持たせる (最初はぜんぶ 1)
? 弱分類器を順に学習
? 弱分類器の重みと閾値の最適値を決定
? 前の弱分類器が誤判定した入力は, 後の弱分類
器では重みを上げて学習](https://image.slidesharecdn.com/slide-150618021430-lva1-app6892/85/BrandSafe-24-320.jpg)
![Perceptron [’58 Rosenblatt]
特徴
? 多次元の入力の重みづけをいい感じにする
? 計算がすごく簡単 (実装も簡単)
? 教科書に載ってるレベルで枯れている
? 近年見直されさまざまな改良が
実装方針
? ひとまず単純な実装
? キーワードの出現ベクトルが入力
? 精度を見つつ改良版を試す](https://image.slidesharecdn.com/slide-150618021430-lva1-app6892/85/BrandSafe-27-320.jpg)
![Perceptron [’58 Rosenblatt]
— 原理
学習手続
1. 重みベクトルを w = (0, . . ., 0) で初期化
2. 現在の重みでの判定結果 g
3. 本来の正しい判定結果 a ∈ {1, ?1}
4. a · g > 0 なら判定成功 or フィードバック
判定: 重み w と入力 p の内積 (の正負)
? w · p
フィードバック
? 正しい結果の向きに入力分だけ重みを更新
w := w + ap](https://image.slidesharecdn.com/slide-150618021430-lva1-app6892/85/BrandSafe-28-320.jpg)


『BrandSafe はてな』のアドベリフィケーションのしくみ
- 1. 『BrandSafe はてな』の アドベリフィケーションの しくみ 伊奈 林太郎 id:tarao @oarat 株式会社はてな Hatena Engineer Seminar #5 2015-06-16
- 2. 自己紹介 名前 ? い な 伊奈? ? り ん た ろ う 林太郎? (id:tarao / @oarat ) 所属 はてなブックマークチーム 2008-08 はてなインターン 2008-10 はてなアルバイト (ブックマークチーム) 2010-04 日本学術振興会 特別研究員 (DC1) 2013-04 はてな正社員 2013-12 ブックマークチーム
- 3. 自己紹介 — やってること インターン / アルバイト時代 2008-08 本文抽出エンジン 2008-12 おすすめユーザ 2009-04 検索欄「もしかして」 2009-07 ユーザページ全文検索 2009-10 地域別エントリ 最近 2014-08 BrandSafe はてな 2014-09 Presso Twitter 連携 2015-04 Scala 三昧
- 4. 自己紹介 — やってること インターン / アルバイト時代 2008-08 本文抽出エンジン 2008-12 おすすめユーザ 2009-04 検索欄「もしかして」 2009-07 ユーザページ全文検索 2009-10 地域別エントリ 最近 2014-08 BrandSafe はてな 2014-09 Presso Twitter 連携 2015-04 Scala 三昧 ? 検索技術 > 機械学習 ? アドテク
- 5. 自己紹介 — やってること インターン / アルバイト時代 2008-08 本文抽出エンジン 2008-12 おすすめユーザ 2009-04 検索欄「もしかして」 2009-07 ユーザページ全文検索 2009-10 地域別エントリ 最近 2014-08 BrandSafe はてな 2014-09 Presso Twitter 連携 2015-04 Scala 三昧 ? 検索技術 > 機械学習 ? アドテク ? (大学時代の専門は型理論)
- 6. BrandSafe はてなBrandSafe はてなBrandSafe はてなBrandSafe はてなBrandSafe はてなBrandSafe はてなBrandSafe はてな
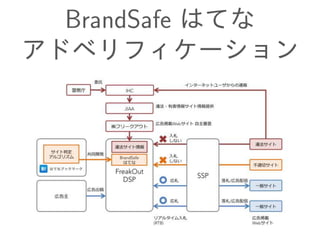
- 8. BrandSafe はてな アドベリフィケーション 広告配信先をフィルタリング ? アダルトサイト ? 2ch まとめ ? 違法ダウンロード 技術的には ? 任意の Web ページ (URL) の分類問題 ? 各属性に対して二値判定
- 9. どうやって判定? いろいろなやり方の選択肢 ? 手動...orz ? ルールベース ? 機械学習 etc. できるだけ楽にシンプルに ? 工数を抑えたい ? 計算量を抑えたい ? 複雑すぎてメンテできないと困る
- 10. URLの判定が走るまで 1. ユーザによる URL のブックマーク 2. GET 3. 本文抽出 4. メタ情報抽出 ? キーワード ? リンク先 ? 画像 5. カテゴリ判定 6. アドベリ判定 ? 1をブックマーク以外のトリガからも実行
- 12. 素朴なフィルタの例 NG ワード判定 ? 実装が簡単 ? 正規表現マッチ ? メンテナンスが簡単 ? 単語をリストに追加するだけ ? 精度はあまりよくない リンクの数 ? e.g. 特定ドメインへのリンク ? e.g. アフィリエイトリンクの多さ
- 13. 素朴なフィルタによる誤爆 例 ? 「カブトムシの交尾」で Google AdSense 停止 (実際はもっと複合的な要因ではないかとの指摘も) ? 「やまもといちろう」問題
- 14. 素朴なフィルタによる誤爆 例 ? 「カブトムシの交尾」で Google AdSense 停止 (実際はもっと複合的な要因ではないかとの指摘も) ? 「やまもといちろう」問題
- 15. こんなことでは困る!
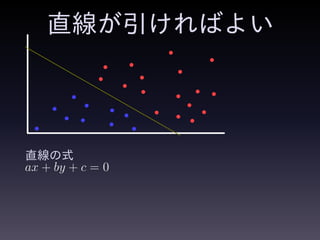
- 19. 直線が引ければよい 直線の式 ax + by + c = 0
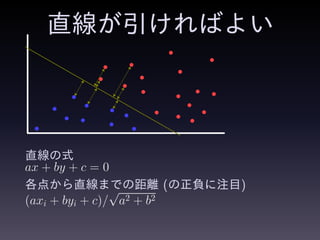
- 20. 直線が引ければよい 直線の式 ax + by + c = 0 各点から直線までの距離 (の正負に注目) (axi + byi + c)/ √ a2 + b2
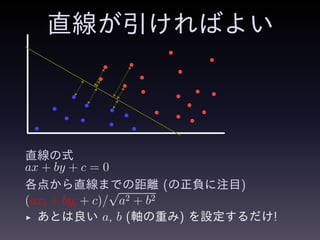
- 21. 直線が引ければよい 直線の式 ax + by + c = 0 各点から直線までの距離 (の正負に注目) (axi + byi + c)/ √ a2 + b2 ? あとは良い a, b (軸の重み) を設定するだけ!
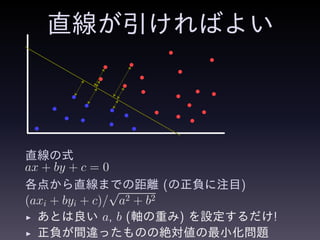
- 22. 直線が引ければよい 直線の式 ax + by + c = 0 各点から直線までの距離 (の正負に注目) (axi + byi + c)/ √ a2 + b2 ? あとは良い a, b (軸の重み) を設定するだけ! ? 正負が間違ったものの絶対値の最小化問題
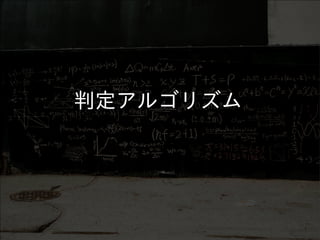
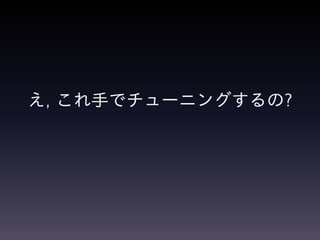
- 24. AdaBoost [’95 Freund, Schapire] 特徴 ? 弱分類器の重みと閾値を自動的に決定 ? 弱分類器は弱すぎなければなんでもよい ? 精度が 50%以上なら全体精度も向上 ? いろんな弱分類器をいい具合に組み合わせ可能 原理 ? 入力にも重みを持たせる (最初はぜんぶ 1) ? 弱分類器を順に学習 ? 弱分類器の重みと閾値の最適値を決定 ? 前の弱分類器が誤判定した入力は, 後の弱分類 器では重みを上げて学習
- 25. BSはてなの弱分類器 ? ブックマークした人のカテゴリの偏り ? タグの出現頻度 ? 特定タグ占有率 ? コメント率 ? 特定属性 URL へのリンク ? キーワードの出現傾向
- 26. BSはてなの弱分類器 ? ブックマークした人のカテゴリの偏り ? タグの出現頻度 ? 特定タグ占有率 ? コメント率 ? 特定属性 URL へのリンク ? キーワードの出現傾向 ブックマークされてなくても 高精度に判定したい!
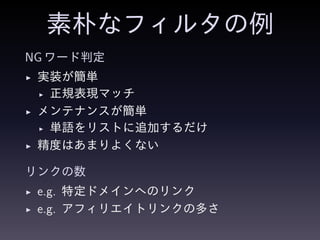
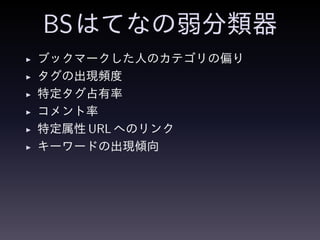
- 27. Perceptron [’58 Rosenblatt] 特徴 ? 多次元の入力の重みづけをいい感じにする ? 計算がすごく簡単 (実装も簡単) ? 教科書に載ってるレベルで枯れている ? 近年見直されさまざまな改良が 実装方針 ? ひとまず単純な実装 ? キーワードの出現ベクトルが入力 ? 精度を見つつ改良版を試す
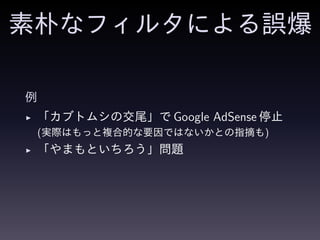
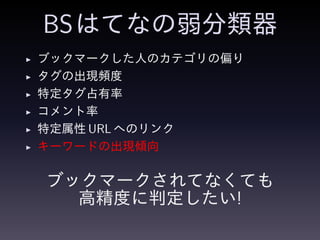
- 28. Perceptron [’58 Rosenblatt] — 原理 学習手続 1. 重みベクトルを w = (0, . . ., 0) で初期化 2. 現在の重みでの判定結果 g 3. 本来の正しい判定結果 a ∈ {1, ?1} 4. a · g > 0 なら判定成功 or フィードバック 判定: 重み w と入力 p の内積 (の正負) ? w · p フィードバック ? 正しい結果の向きに入力分だけ重みを更新 w := w + ap
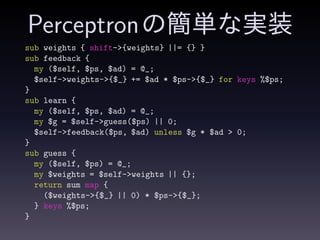
- 29. Perceptronの簡単な実装 sub weights { shift->{weights} ||= {} } sub feedback { my ($self, $ps, $ad) = @_; $self->weights->{$_} += $ad * $ps->{$_} for keys %$ps; } sub learn { my ($self, $ps, $ad) = @_; my $g = $self->guess($ps) || 0; $self->feedback($ps, $ad) unless $g * $ad > 0; } sub guess { my ($self, $ps) = @_; my $weights = $self->weights || {}; return sum map { ($weights->{$_} || 0) * $ps->{$_}; } keys %$ps; }
- 30. なんと, これですごく精度が出た
- 32. 教師データ集めが肝 ? タグ検索等を駆使して傾向を把握 ? 大量の URL を人の目で判定 ? 判定基準のぶれをどう抑えるか ? データは多い方がよい → たいへん ? 誤判定フィードバックを反映していくしくみ
- 33. AdaBoost ? 元々スパムフィルタのために導入されていた ? 単純な実装だが本来の計算と少しだけ違う ? 素直に AdaGrad+RDA にしたら精度が低下...orz
- 34. Perceptron ? 驚くほどシンプルな実装 ? はてなキーワードの見出し語を使う → スラングなどへの対応 ? 入力キーワードを闇雲に増やすと精度が低下 ? 次元の呪い ? 特徴語に絞って入力している
- 35. 今後の展望 ? 判定できる属性の拡充 ? 画像対応 ? フィルタリング以外の用途 ? もう少し大規模に特徴量を扱うしくみ
- 36. まとめ ? はてなブックマークの実装/知見を利用した はてな発のアドベリフィケーションシステム ? 比較的枯れた教科書的な技術の組み合わせ ? AdaBoost ? Perceptron ? 大規模データを扱ってきた知見を発揮
- 37. WE ARE HIRING ? アドテク?機械学習エンジニア 絶賛募集中 ? 東京 / 京都 どちらの勤務でも可
- 38. SUMMER INTERNSHIP 2015.8.10-9.4 ? Scala, Swift も学べる! ? アドテクコースも選べる! 応募締切 6 月 29 日 htn.to/intern2015