coma Study Room vol.2 Arduino Workshop
?
6 likes?5,064 views

This slide explains how to control motors by Arduino and Processing. You can see one of the applications of motor control in this vid: youtu.be/0nw3DtXrLLI (Raspberry Pi is used here instead of Arduino) coma Study Room vol.2 3.22(Sat) 18:00-22:30@BulletĪ»s http://coma.io/coma-study-room-vol-2/


![?ó█Processingż½żķ╗ž▄×╩²ż“ēõĖ³ż╣żļ
int
?speed;
?
?
?
void
?setup(){
?
?
?Serial.begin(9600);
?
?//źĘźĻźóźļ═©ą┼ż“9600bpsżŪķ_╩╝
?
?
?
?
?
}
?
?
?
void
?loop(){
?
//źĘźĻźóźļ═©ą┼żŪ╦═żķżņżŲżŁż┐źŪ®`ź┐ż¼żóżņżąęįŽ┬ż“īgąą
?
?if
?(Serial.available()>0){
?
?
?
?
?speed
?=
?Serial.read();
?
?
?
?
?
?//ēõ╩²speedż╦╩▄ą┼żĘż┐éÄż“╚ļżņżļ
?
?
?
?
?analogWrite(6,
?speed);
?
?
?
?
?
?//╗ž▄×╩²=speedżŪźŌ®`ź┐®`ż“╗ž▄׿Ąż╗żļ
?
?
?
?
?digitalWrite(5,
?LOW);
?
?
?
?}
?
}
?
!
!
Arduino ?
dcmotor_?3.ino ?
źĘźĻźóźļżŪ╩▄ą┼żĘż┐éÄż“╗ž▄×╩²ż╦╩╣ż”ź╣ź▒ź├ź┴
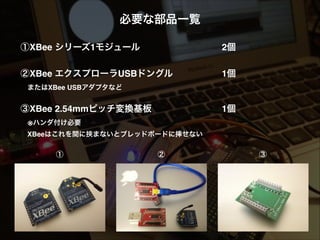
?źĘźĻźóźļ═©ą┼żŪProcessingż½żķźŌ®`ź┐®`ż╬╗ž▄×╩²ż“ųŲė∙żĘżŲż▀ż▐ż╣?
?Processingż“╩╣ż”ż│ż╚żŪźŁ®`żõGUIż╦żĶżļųŲė∙ż¼║åģgż╦żŪżŁż▐ż╣
import
?processing.serial.*;
?//źĘźĻźóźļ═©ą┼źķźżźųźķźĻż╬źżź¾ź▌®`ź╚
?
Serial
?myPort;
?
?
? //ź¬źųźĖź¦ź»ź╚ēõ╩²ż╬ą¹čį
?
int
?ArduinoPortNum
?=
?5;
?
? //ź│ź¾źĮ®`źļż╦▒Ē╩ŠżĄżņż┐ź▌®`ź╚Ę¼║┼ż╦įOČ©
?
int
?speed;
?
?
? //╗ž▄×╩²ż╬ēõ╩²
?
?
?
void
?setup(){
?
?
?frameRate(30);
?
? //╗Ł├µż╬źšźņ®`źÓźņ®`ź╚ż“30fpsż╦
?
?
?size(255,
?300);
?
? //╗Ł├µźĄźżź║ż╬įOČ©
?
?
?println(Serial.list());
? //ź│ź¾źĮ®`źļż╦ź▌®`ź╚ę╗ėEż“▒Ē╩Š
?
?
?//ź▌®`ź╚Ę¼║┼ArduinoPortNumż“9600bpsżŪź¬®`źūź¾ż╣żļ
?
?
?myPort
?=
?new
?Serial(this,
?Serial.list()[ArduinoPortNum],
?9600);
?
}
?
?
?
void
?draw(){
?
?
?background(100,250,250);
?
?
?
?
?stroke(255);
?
?
?line(0,235,250,235);
?
?
?//ź▐ź”ź╣Xū∙ś╦ż“╗ž▄×╩²ż╬éÄż╦╩╣ż”
?
?
?speed
?=
?mouseX;
?
?
?
?
?//ź╣źķźżź└®`ż╚żĘżŲāęż“▒Ē╩Š
?
?
?
?
?fill(0,110,220);
?
?
?ellipse(mouseX,235,10,10);
?
?
?//╗Ł├µż╦╗ž▄×╩²ż╬éÄż“▒Ē╩Šż╣żļ
?
?
?textAlign(CENTER,
?CENTER);
?
?
?text("speed",width/2,80);
?
?
?
?
?text(speed,width/2,100);
?
?
?//╗ž▄×╩²ż╬éÄż“╦═ą┼
?
?
?myPort.write(speed);
?
}
?
! !
!
Processing ?
dcmotorController.pde ?
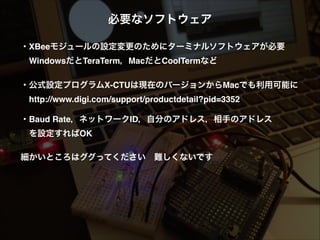
ź▐ź”ź╣ū∙ś╦ż“Arduinoż╦╦═ą┼ż╣żļź╣ź▒ź├ź┴
źĘźĻźóźļ═©ą┼ż╦ż─żżżŲżŽŪ░╗žź’®`ź»źĘźńź├źū┘Y┴Žż╦żĶżĻįö╝Üż╩šh├„ż¼żóżĻż▐ż╣!
ż╬żŪ▓╬┐╝ż╦żĘżŲż▀żŲż»ż└żĄżż?
http://coma.io/coma-study-room-vol-1/
ź▐ź”ź╣ż“äėż½ż╣ż╚?
źŌ®`ź┐®`ż╬╗ž▄×╩²ż¼ēõż’żĻż▐ż╣](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-25-320.jpg)
![ó┌Processingż½żķźĄ®`ź▄ż“äėż½ż╣
#include
?<Servo.h>
? //źĄ®`ź▄źķźżźųźķźĻż“╩╣ė├ż╣żļ
?
Servo
?servo0;
?
? //źżź¾ź╣ź┐ź¾ź╣servo0ż“ū„żļ
?
?
?
int
?deg;
?
? //ĮŪČ╚ż╬ēõ╩²degż“ą¹čį
?
?
?
?
?
void
?setup(){
?
?
?servo0.attach(2);
? //źĄ®`ź▄źŌ®`ź┐ą┼║┼ŠĆż“ż─ż╩ż░źįź¾ż“2Ę¼źįź¾ż╦ųĖČ©
?
?
?Serial.begin(9600);
?//źĘźĻźóźļ═©ą┼ż“9600bpsżŪķ_╩╝
?
?
?
}
?
?
?
void
?loop(){
?
?
?//źĘźĻźóźļ═©ą┼żŪ╦═żķżņżŲżŁż┐źŪ®`ź┐ż¼żóżņżąęįŽ┬ż“īgąą
?
?
?if
?(Serial.available()>0){
?
?
?
?
?deg
?=
?Serial.read();
?
?//źĘźĻźóźļ═©ą┼żŪ╦═żķżņżŲżŁż┐źŪ®`ź┐ż“degż╦┤·╚ļ
?
?
?
?
?servo0.write(deg);
?
?
?
?//źĄ®`ź▄źŌ®`ź┐ż╬╗ž▄×ĮŪČ╚ż“degż╦ź╗ź├ź╚
?
?
?}
?
}
?
!
!
?DCźŌ®`ź┐®`żŪżõż├ż┐ż│ż╚ż╚╗∙▒ŠĄ─ż╦ę╗ŠwżŪż╣
import
?processing.serial.*;
? //źĘźĻźóźļ═©ą┼źķźżźųźķźĻż╬źżź¾ź▌®`ź╚
?
Serial
?myPort;
?
?
? //ź¬źųźĖź¦ź»ź╚ēõ╩²ż╬ą¹čį
?
int
?ArduinoPortNum
?=
?5;
?
? //ź│ź¾źĮ®`źļż╦▒Ē╩ŠżĄżņż┐ź▌®`ź╚Ę¼║┼ż╦įO
Č©
?
int
?degree;
?
?
? //ĮŪČ╚ż╬ēõ╩²
?
?
?
void
?setup(){
?
?
?frameRate(30);
?
? //╗Ł├µż╬źšźņ®`źÓźņ®`ź╚ż“30fpsż╦
?
?
?size(220,
?300);
?
? //╗Ł├µźĄźżź║ż╬įOČ©
?
?
?println(Serial.list());
?//ź│ź¾źĮ®`źļż╦ź▌®`ź╚ę╗ėEż“▒Ē╩Š
?
?
?//ź▌®`ź╚Ę¼║┼ArduinoPortNumż“9600bpsżŪź¬®`źūź¾ż╣żļ
?
?
?myPort
?=
?new
?Serial(this,
?Serial.list()[ArduinoPortNum],
?9600);
?
}
?
?
?
void
?draw(){
?
?
?background(100,250,250);
?
?
?
?
?stroke(255);
?
?
?line(0,235,250,235);
?
?
?fill(0,110,220);
?
?
?
?
?textAlign(CENTER,
?CENTER);
?
?
?text("degree",width/2,80);
?
?
?//ź▐ź”ź╣ū∙ś╦ż“źĄ®`ź▄ż╬╗ž▄×ĮŪČ╚ż╦╩╣ż”
?
?
?if(20<=mouseX
?&&
?mouseX<=200){
?
?
?
?
?degree
?=
?mouseX-?®\20;
?
?
?
?
?ellipse(mouseX,235,10,10);
?
?
?
?
?text(degree,width/2,100);
?
?
?}
?
?
?
?
?if(20>mouseX){
?
?
?
?
?degree
?=
?0;
?
?
?
?
?ellipse(20,235,10,10);
?
?
?
?
?text(degree,width/2,100);
?
?
?}
?
?
?
?
?if(200<mouseX){
?
?
?
?
?degree
?=
?180;
?
?
?
?
?ellipse(200,235,10,10);
?
?
?
?
?text(degree,width/2,100);
?
?
?}
?
?
?myPort.write(degree);
? //╗ž▄×ĮŪČ╚degreeż“╦═ą┼
?
}
?
Arduino ?
servo_?3.ino ?
źĘźĻźóźļżŪ╩▄ą┼żĘż┐éÄż“╗ž▄×?ĮŪČ╚Č╚ż╦╩╣ż”ź╣ź▒ź├ź┴
Processing ?
servoController.pde ?
ź▐ź”ź╣ū∙ś╦ż“0?Ī½180ż╬╣ĀćņżŪArduinoż╦╦═ą┼
ź▐ź”ź╣ż“äėż½ż╣ż╚?
źĄ®`ź▄ż╬?ĮŪČ╚Č╚ż¼ēõż’żĻż▐ż╣](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-30-320.jpg)

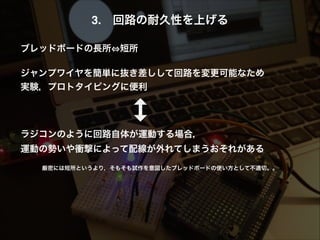
![ó┘ŠÓļxź╗ź¾źĄż╚ż╬▀Bą»
Šė├▀żĻĘ└?ų╣źįź│źįź│źŽź¾ź▐®`ż╬ź╣ź▒ź├ź┴ż╚╗ž┬Ę┬Ę/*ŠÓļxź╗ź¾źĄżŽźĘźŃ®`źū£yŠÓźŌźĖźÕ®`źļGP2Y0A21YKż“╩╣ė├*/
?
#include
?<Servo.h>
?
?//źĄ®`ź▄źķźżźųźķźĻż╬źżź¾ź▌®`ź╚
?
Servo
?servo0;
?
?//źżź¾ź╣ź┐ź¾ź╣servo0ż“ū„│╔
?
int
?sensorPin
?=
?0;
?
?//źóź╩źĒź░0Ę¼źįź¾(A0)ż“ŠÓļxź╗ź¾źĄż╚ĮėŠA
?
int
?sensorValue
?=
?0;
?
?//ź╗ź¾źĄż╬šiż▀╚ĪżĻéÄż“╚ļżņżļēõ╩²
?
int
?tempValue
?=
?0;
?
?//ź╗ź¾źĄż╬šiż▀╚ĪżĻéÄż“╚ļżņżļēõ╩²
?
?
?
void
?setup(){
?
?
?Serial.begin(9600);
?
?//źĘźĻźóźļ═©ą┼ż“ķ_╩╝
?
?
?servo0.attach(2);
?
?//źŪźĖź┐źļ2Ę¼źįź¾ż╦źĄ®`ź▄ż“ż─ż╩ż░
?
}
?
?
?
void
?loop(){
?
?
?sensorValue
?=
?analogRead(sensorPin);
?
?//ź╗ź¾źĄéÄż╬šiż▀╚ĪżĻ
?
?
?tempValue
?=
?sensorValue;
?
?//tempValueż╦éÄż“▒Ż╣▄
?
?
?
?
?/*ŠÓļxż¼Į³▀^ż«ż┐ż╚żŁź╗ź¾źĄż╬éÄż¼░k╔óż╣żļż│ż╚ż“¤oęĢ*/
?
?
?if
?(sensorValue
?<
?70){
?
?
?
?
?sensorValue
?=
?70;
?
?
?}
?
?
?else{
?
?
?
?
?sensorValue
?=
?tempValue;
?
?
?}
?
?
?/*ŠÓļxź╗ź¾źĄż╬šiż▀╚ĪżĻéÄż“ŠÓļx[cm]ż╦ēõōQ*/
?
?
?int
?range
?=
?(6787
?/
?(
?sensorValue
?-?®\
?3))
?-?®\
?4;
?
?
?/*źĘźĻźóźļźŌź╦ź┐ż╦ēõōQßßż╬ŠÓļx[cm]ż╚╔·źŪ®`ź┐ż“▒Ē╩Š*/
?
?
?Serial.print(range);
?
?
?Serial.print("
?,
?");
?
?
?Serial.print(sensorValue);
?
?
?Serial.print("na");
?
?
?/*īØŽ¾╬’ż╚ź╗ź¾źĄż╚ż╬ŠÓļxż¼20cmęįŽ┬ż╬ż╚żŁźĄ®`ź▄ż“äėū„*/
?
?
?
?
?if
?(range
?<
?20){
?
?
?
?
?servo0.write(110);
?
?
?
?
?delay(500);
?
?
?
?
?servo0.write(10);
?
?
?
?
?delay(1500);
?
?
?
?
?servo0.write(110);
?
?
?
?
?delay(100);
?
?
?}
?
?
?else{
?
?
?
?
?servo0.write(90);
?
?
?}
?
}
ŠÓļxļxź╗ź¾źĄŻ║źĘźŃ®`źū£yŠÓźŌźĖźÕ®`źļGPY0A21YK ?
żĄżŁż█ż╔ĮMż¾ż└RCźĄ®`ź▄ż╬╗ž┬Ę┬Ęż“żĮż╬ż▐ż▐╩╣żżż▐ż╣ ?
ŠÓļxļxź╗ź¾źĄżŽźĘźŃ®`źū£yŠÓźŌźĖźÕ®`źļGPY0A21YKŻ©1éĆ400ā꯮ż“╩╣?ė├
?░ūŻ║ź╗ź¾źĄ│÷?┴”┴” ?
?│ÓŻ║ź░źķź¾ź╔ ?
!
?³\Ż║Vcc(5V) ?
ą┤šµż╬żĶż”ż╦Ż¼ ?
ą░ÉÖż╩┼õŠĆ?╔½╩╦śöż╦ż╩ż├żŲżżżļż╬żŪ ?
┼õŠĆĢrż╦żŽķg▀`ż©ż╩żżżĶż” ?
ż┤ūóęŌż»ż└żĄżż](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-33-320.jpg)
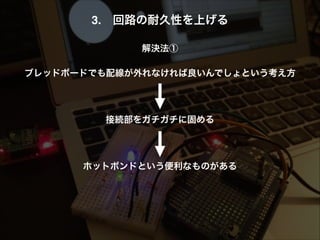
![ó█ż┴żńż├ż╚ż└ż▒č}ļjż╩ųŲė∙
└²└²Ż║īØŽ¾ż“ūĘ╬▓ż╣żļźĒź▄ź├ź╚źó®`źÓ
?Processingż╬źĄź¾źūźļReach ?2 ?http://www.processing.org/examples/reach2.html ?
?Ž╚Č╦ż¼ź▐ź”ź╣ū∙ś╦ż“ūĘżżż½ż▒żļČÓķv╣ØźŌźŪźļ ?
!
!
!
!
!
!
!
!
!
!
ųą?╔Ēż“ęįŽ┬ż╬żĶż”ż╦Ė─įņŻ║ ?
?īgļHż╬RCźĄ®`ź▄ż╬éĆ╩²ż╚ķv╣Ø╩²ż“?ę╗ų┬żĄż╗żŲ ?
?ĪĪļO²ĀżĻ║Žż”źĄ®`ź▄ķgż╬ŽÓīØĄ─ż╩?ĮŪČ╚Č╚[ĪŃ]ż“╚ĪĄ├żĘŻ¼ ?
?ĪĪźĘźĻźóźļżŪArduinożž╦═ą┼ ?
!
?ź½źßźķżŪšJūRūRżĘż┐īØŽ¾ż“ūĘż’ż╗ż┐żĻŻ¼ ?
?ĪĪKinectżõLeapż╚▀Bą»żĄż╗żŲźóźąź┐®`źĒź▄ź├ź╚ż“ū„żļż│ż╚ż¼┐╔─▄?
?ĪĪŻ©?ūįĘųż¼?╩ųż“š±żļż╚?╩ųż“š±żĻż½ż©ż╣źĒź▄ź├ź╚ż╩ż╔Ż® ?
!
?Processingż╦żŽ╦¹ż╦żŌźßź½ż“ū„żļ╔ŽżŪ▒Ń▒Ń└¹└¹ż╩źĄź¾źūźļż¼ż┐ż»żĄż¾żóżĻż▐ż╣
RCźĄ®`ź▄ż╚źóźżź╣ż╬░¶żŪųŲū„żĘż┐└²└² ?](https://image.slidesharecdn.com/comastudyroomvol2up-140323082247-phpapp02/85/coma-Study-Room-vol-2-Arduino-Workshop-35-320.jpg)
coma Study Room vol.2 Arduino Workshop
- 1. coma Study Room!! 2014.03.22! @BULLETĪ»S! presented by coma team Arduino! Workshop! ! ż¬żŌż┴żŃźŽź├ź»?Ī½äėż»żŌż╬ż“ż─ż»żĒż”ŻĪĪ½! ! coma team ?Eto Haruhiko 1.! źżź¾ź╚źĒź└ź»źĘźńź¾! ! ! ! ! ! ? 2. ! Arduinoż╚żŽ! ! ! ! ! ! ! 3.! DCźŌ®`ź┐®`ż│ż╚żŽżĖżß! ! ! ! ! ! ! 4.! źĄ®`ź▄źŌ®`ź┐®`ż│ż╚żŽżĖżß! ! ! ! 5.! ÅĻė├└²! 6.! īgė├ż╦Ž“ż▒żŲż╬Tips! ! ! ! ! !
- 3. comaż╚żŽ coma?=?communication art project? ?Webź┌®`źĖŻ║http://coma.io/! ! ?Technologyż“╩╣ż├ż┐ū„ŲĘż“═©żĘżŲŻ¼! ?╚╦ż╬ķgż╦ź│ź▀źÕź╦ź▒®`źĘźńź¾ż“ż─ż»żĻż└ż╣ż│ż╚ż“─┐Ą─ż╚żĘżŲżżż▐ż╣ĪŻ! ! ?Ü░į┬1╗žĪó╬„┬ķ▓╝BulletĪ»sż╦żŲķ_┤▀żĘżŲżżż▐ż╣ĪŻ comaDiscotheque coma Study Room coma CreatorĪ»s Session
- 4. coma Study Room vol.1 ArduinożŪ ? źŪ®`ź┐ż“╚ĪĄ├ ? źĘźĻźóźļ═©ą┼? Ż©ėąŠĆŻ® ╝ė╦┘Č╚Č╚ź╗ź¾źĄżŪ? ╝ė╦┘Č╚Č╚ż“Ś╩│÷ ? ProcessingżŪ? źŪ®`ź┐ż“╚ĪĄ├ ╝ė╦┘Č╚ź╗ź¾źĄ+Arduino PC ╝ė╦┘Č╚Č╚ż╦ÅĻżĖżŲ ? RGB-®\??LEDż“ĄŃĄŲ Ū░╗žż╬ź’®`ź»źĘźńź├źū─┌╚▌ ╝ė╦┘Č╚Č╚ż“? źėźĖźÕźóźķźżź║ ?ź╗ź¾źĄż“╩╣ż├ż┐?╣żū„?╚ļ?ķTż╚żĘżŲŻ¼╝ė╦┘Č╚Č╚ź╗ź¾źĄż╬Ūķł¾ż“ęĢęÖ╗»ż╣żļźĘź╣źŲźÓż“ū„żĻż▐żĘż┐ ? ! ?ź┘®`ź╣ż╦ż╩ż├żŲżżżļż╬żŽcomaDiscothequeVer0.02ż╦│÷č▌żĘż┐comakumaźĘź╣źŲźÓżŪż╣ ĪŅź’®`ź»źĘźńź├źūż╚comakumaż╬įö╝ÜżŽ ? ?ĪĪcomaź┌®`źĖŻ©http://coma.io/Ż® ? ?ĪĪż╦żŲ╣½ķ_żĘżŲżżż▐ż╣ ź╗ź¾źĄż“š±żļż╚Ū“ż¼äėż» ?
- 5. Į±╗žż╬ź’®`ź»źĘźńź├źū─┌╚▌ äėż»żŌż╬ż“ū„żĒż”ŻĪ ?¼Fīg╩└ĮńżŪżŌż╬ż¼äėż»ż╬żŽżĮżņż└ż▒żŪż¬żŌżĘżĒżżŻĪ ? ! ?Arduinoż╦żĶżļDCźŌ®`ź┐®`ż╚źĄ®`ź▄źŌ®`ź┐®`ż╬äėż½żĘ?ĘĮż╬╗∙▒Šż“覿¾żŪŻ¼ ? ?ĪĪ?ūįżķ▀\äėż╣żļųiż╬┤µį┌ż“ųŲū„żĘżŲżżżŁż▐żĘżńż” ź½źßźķ┤Ņ▌dźķźĖź│ź¾ ?궜Sż╦żóż’ż╗żŲė╗żļż╠żżż░żļż▀ Šė├▀żĻĘ└?ų╣źįź│źįź│źŽź¾ź▐®` ╝╚┤µż╬ż¬żŌż┴żŃż“źŽź├ź»żĘż┐żĻŻ¼ ? ź╗ź¾źĄż╚ĮMż▀║Žż’ż╗żņżą┐╔─▄ąįżŽżżżĒżżżĒ ╔Žę░╣½ł@żŪŻĪ ź»źķźųżŪŻĪ ?ūįš¼š¼żŪŻĪ
- 6. źóź»ź┴źÕź©®`ź┐ż╚żŽŻ┐! ! ?ÖCąĄż╦ż╚ż├żŲż╬▀\äėŲ„ ?ź╗ź¾źĄŻ©ĖąęÖŲ„Ż®ż╚│÷┴”ū░ų├Ż©╔Ē╠ÕŻ®ż¼żóżļż│ż╚żŪŻ¼! ?ÖCąĄżŽ═ŌĮńż╦ķ_ż½żņż┐źżź¾ź┐źķź»źŲźŻźųż╩źĘź╣źŲźÓż╦ż╩żļ! ! ?źŌ®`ź┐®`ż╩ż╔ż╬źóź»ź┴źÕź©®`ź┐żŽŻ¼! ?┴”żõ▀\äėż“īg¼FżĘŻ¼ÖCąĄż╦ż╚ż├żŲż╬ĮŅ╚Ōż╬ę█ĖŅż“żŌż─ ź©ź═źļź«®`ēõōQ ? ź╗ź¾źĄ ? Arduino? PC ? │÷?┴”┴”ū░ų├ ĖąęÖŲ„ ├Śż▀żĮ ╔Ē╠Õ ?ę¶?ĪĪ╣Ō?ĪĪ?┴”┴”?ĪĪ ? ļŖÜ▌?ĪĪ┤┼Ü▌?ĪĪ ? ╗»č¦╬’┘| ? ╬┬Č╚Č╚?ĪĪ╩¬Č╚Č╚ ? Ę┼╔õŠĆ ? ė│Ž± ? ŠÓļxļx?ĪĪ╝ė╦┘Č╚Č╚ ? ?ĮŪČ╚Č╚?ĪĪ?ĘĮ╬╗ ? łR?┴”┴”?ĪĪš±äė ? ż╩ż╔ż╩ż╔ ? ╬’└Ē└Ē┴┐┴┐Ż¼╗»č¦┴┐┴┐ ? ! ę¶ ! ╣Ō ! ┴” ! ¤ß? ! etc. ═Ō ! ! ! ! Įń ═Ō ! ! ! ! Įń ! ! ! ! ! ! ! ! ź©ź═źļź«®`ēõōQ ?
- 9. Arduinoż╚żŽŻ┐! ! ! ?źčźĮź│ź¾ż╚USBź▒®`źųźļżŪż─ż╩żżżŪŻ¼ī¤ė├ż╬ķ_░kŁhŠ│Ż©IDEŻ®! ?żŪąąż’ż╗ż┐żżäI└Ēż“źūźĒź░źķź▀ź¾ź░ż╣żļ! ! ?Arduinoż╬źūźĒź░źķźÓżŽź╣ź▒ź├ź┴ż╚║¶żążņżļ! ?źįź¾╩²Ż¼ź»źĒź├ź»Ż¼źßźŌźĻŻ¼źĄźżź║ż╩ż╔ż¼«Éż╩żļ! ?╔½ż¾ż╩ĘNŅÉż¼żóżĻŻ¼─┐Ą─ż╦ÅĻżĖżŲ╩╣żżĘųż▒żļ! ?╗∙▒ŠżŽArduino UnoŻ©żóż▐żĻż│ż└ż’żļ▒žę¬ż╩żĘŻ®! ! ! ź¬®`źūź¾źŽ®`ź╔ź”ź¦źóż╩ż╬żŪ! ! ▓┐ŲĘż“┘Iż├żŲżŁżŲūįū„żŌ┐╔─▄
- 10. ?źŪźĖź┐źļ│÷?┴”┴”źįź¾ ? ??Ī½ż¼ĖČżżżŲżżżļż╬żŽę╔╦Ųźóź╩źĒź░│÷?┴”┴”Ż©PWMŻ®ż╦╩╣ż©żļŻ©0?Ī½5VŻ®?ĪĪ ? ?ĪĪĪ· ?źŌ®`ź┐®`ż╬╗ž▄×╦┘Č╚Č╚ż“ēõż©żļŻ¼LEDż╬├„żļżĄż“ēõż©żļż╩ż╔ ?źóź╩źĒź░?╚ļ?┴”┴”źįź¾ ? ?ĪĪź╗ź¾źĄż╬│÷?┴”┴”źįź¾ż╚ĮėŠA ?5Vźįź¾Ż¼3.3Vźįź¾ ? ?ĪĪ╦ž?ūėżžż╬ļŖį┤╣®Įoż╦╩╣?ė├ ? ?ĪĪĮ±╗žżŽźŌ®`ź┐®`ź╔źķźżźąż╬ļŖį┤ż╚żĘżŲ5Vż“╩╣?ė├ ?źóź╩źĒź░╗∙£╩ļŖłRźįź¾? ?ĪĪźóź╩źĒź░?╚ļ?┴”┴”źįź¾ż╬╗∙£╩ļŖłRż“ ? ?ĪĪ?╚ļ?┴”┴”ż╣żļ ? ?ĪĪ╗∙▒ŠĄ─ż╦ź╗ź¾źĄż╬ļŖį┤ļŖłRż╚ ? ?ĪĪ═¼żĖż╦ż╣żņżąOK ?ź░źķź¾ź╔źįź¾Ż©č}╩²ėąŻ®? ?ĪĪ╦ž?ūėż╬ź░źķź¾ź╔ż“ ? ?ĪĪż│ż│ż╦ĮėŠA ?USBČ╦?ūė ? ?ĪĪ5VĮoļŖ ? ?ĪĪ═©ą┼ Arduinoż╬śŗ│╔ ? ?Ī½Unoż╬ł÷║Ž?Ī½ ? ? ╦¹żŌ╗∙▒ŠżŽ═¼żĖ
- 12. DCźŌ®`ź┐®`ż╚żŽ ?ė└Š├┤┼?╩»ż╦ćņż▐żņżŲź│źżźļż¼?╚ļż├żŲż▐ż╣ ? ?┤┼ł÷ųążŪżŽļŖ┴„┴„ż╦?┴”┴”ż¼āPżŁż▐ż╣ ? ?ż│ż╬?┴”┴”ż“╗ž▄×?┴”┴”ż╦└¹└¹?ė├żĘżŲżżż▐ż╣ ? ! ?ļŖ┴„┴„ż“┴„┴„ż╗żąŻ©ļŖ│žż╦┐Äż▓żąŻ®ż╚ż╦ż½ż»╗žżļ ? ?ļŖ┴„┴„ż╬Ž“żŁż“─µ▄׿Ąż╗żļż╚╗ž▄×?ĘĮŽ“żŌ─µ▄× ?ź█źė®`?ė├═Šż╦żŽź▐źųź┴źŌ®`ź┐®`ż╬čuŲĘż¼ų„┴„┴„żŪż╣ ? ??╣żū„ż╦żŽź┐ź▀źõčuŲĘŻ©ź«źõź▄ź├ź»ź╣Ą╚Ż¼ĖČ╩¶źŌ®`ź┐®`żŽź▐źųź┴čuŻ®ż¼▒Ń▒Ń└¹└¹żŪż╣ ? ?źŌ®`ź┐®`ż╬╗ž▄×╩²Ż¼╗ž▄×?ĘĮŽ“ż“ųŲė∙żŪżŁżļż╚?╔½ż¾ż╩?╣żū„żžż╬Ą└ż¼Ä┌ż¼żĻż▐ż╣ żęż┐ż╣żķ╗ž▄׿╣żļż┐żßż└ż▒ż╦?╔·ż▐żņż┐┤µį┌ ėūżżĒĢ?ĪĪź▀ź╦╦─±lż“═©żĖżŲ ? źŌ®`ź┐®`ż╦ėHżĘż¾ż└?╚╦żŽČÓżżżŽż║ĪŁ
- 13. ų▒ĮėArduinożŪDCźŌ®`ź┐®`żŽ╗žż╗ż╩żż ?ę╗?ĘĮŻ¼Arduinoż╬DC│÷?┴”┴”ļŖ┴„┴„żŽ40mAż▐żŪ źŌ®`ź┐®`FA-®\??130RAż╬źŪ®`ź┐źĘ®`ź╚ż“?ęŖęŖżŲż▀żļż╚ĪŁ ź▐źųź┴źŌ®`ź┐®`ųĻ╩Į╗ß╔ń ?http://www.mabuchi-®\??motor.co.jp/en_?US/cat_??les/fa_?130ra.pdf ?żĶżĻę²?ė├ ¤ožō║╔ū┤æBżŪ0.15A=150mAęį╔ŽŻ¼? Č©Ė±żŪ0.56A=560mAęį╔ŽżŌļŖ┴„ż¼┴„żņżļ ź╣ź╚®`źļĢr(żŌż”Ž▐ĮńĪŁū┤æB)ż╬éÄ Arduinoż╦ų▒ĮėźŌ®`ź┐®`ż“ĮėŠAż╣żļż╚▀^ļŖ┴„┴„żŪArduinoż¼╦└ż╠ ? ż└ż½żķż╚żżż├żŲļŖ│žżŪ╗žż╣ż╚╗ž▄×?ĘĮŽ“żõ╗ž▄×╩²ż╬ųŲė∙ż¼?├µĄ╣ŻĪ
- 14. żĮż│żŪ═Ō▓┐ļŖį┤ż╚źŌ®`ź┐®`ź╔źķźżźąż“╩╣żżż▐ż╣ ╗ž▄×?ĘĮŽ“ż╚╗ž▄×╩²ż“ųĖ?╩Š źŌ®`ź┐®`żžż╬ĮoļŖ ųĖ?╩Šż╦ÅŠż├żŲ ? ļŖ┴„┴„┴┐┴┐ż╚?ĘĮŽ“ż“ųŲė∙ źŌ®`ź┐®`±läė?ė├ źąź├źŲźĻ®` źŌ®`ź┐®` Arduino źŌ®`ź┐®`ź╔źķźżźą Arduinoż╚źŌ®`ź┐®`żŽ ? źŌ®`ź┐®`ź╔źķźżźąż╦żĶż├żŲŪąŪążĻļxļxżĄżņżŲżżżļż╬żŪ ? Arduinoż╦?┤¾ļŖ┴„┴„ż¼┴„┴„żņżļż│ż╚żŽżóżĻż▐ż╗ż¾ Arduinoż½żķźŌ®`ź┐®`ż╬╗ž▄×?ĘĮŽ“ż╚╗ž▄×╩²ż“ųŲė∙żŪżŁżļŻĪ
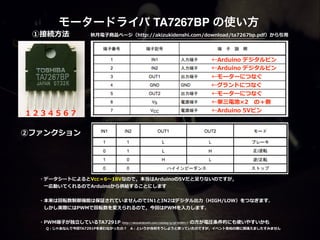
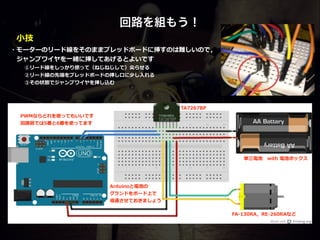
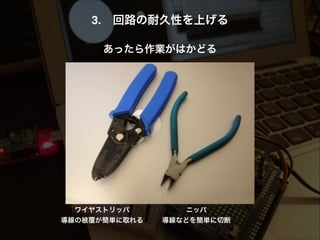
- 15. źŌ®`ź┐®`ź╔źķźżźą TA7267BP ż╬╩╣żżĘĮ ?źŪ®`ź┐źĘ®`ź╚ż╦żĶżļż╚VccŻĮ6?Ī½18Vż╩ż╬żŪŻ¼▒ŠĄ▒żŽArduinoż╬5Vż└ż╚?ūŃżĻż╩żżż╬żŪż╣ż¼Ż¼ ? ?ĪĪ?ę╗ÅĻäėżżżŲż»żņżļż╬żŪArduinoż½żķ╣®Įoż╣żļż│ż╚ż╦żĘż▐ż╣ ? ! ?▒Š└┤żŽ╗ž▄×╩²ųŲė∙ÖC─▄żŽ▒Żį^żĄżņżŲżżż▐ż╗ż¾ż╬żŪIN1ż╚IN2żŽźŪźĖź┐źļ│÷?┴”┴”Ż©HIGH/LOWŻ®ż“ż─ż╩ż«ż▐ż╣Ż« ? ?ĪĪżĘż½żĘīgļHż╦żŽPWMżŪ╗ž▄×╩²ż“ēõż©żķżņżļż╬żŪŻ¼Į±╗žżŽPWMż“?╚ļ?┴”┴”żĘż▐ż╣Ż«? ? ?PWMČ╦?ūėż¼Č└?┴ó┴óżĘżŲżżżļTA7291PŻ©http://akizukidenshi.com/catalog/g/gI-®\??02001/Ż®ż╬?ĘĮż¼ļŖłR╠§╝■Ą─ż╦żŌ╩╣żżżõż╣żżż½żŌ ? ?ĪĪ?ĪĪQŻ║żĖżŃżóż╩ż¾żŪĮ±╗žTA7291Pż“╩╣ż’ż╩ż½ż├ż┐ż╬Ż┐?ĪĪAŻ║ż╚żżż”ż½Ą▒│§żĮż”żĘżĶż”ż╚╦╝ż├żŲżżż┐ż╬żŪż╣ż¼Ż¼źżź┘ź¾ź╚Ėµų¬ż╬ļHż╦ķg▀`ż©ż▐żĘż┐ż╣ż▀ż▐ż╗ż¾ 1 ?2 ?3 ?4 ?5 ?6 ?7 Ū’?į┬ļŖ?ūė╔╠ŲĘź┌®`źĖŻ©http://akizukidenshi.com/download/ta7267bp.pdfŻ®ż½żķę²?ė├ Ī¹Arduino ?5Vźįź¾ Ī¹ģg╚²ļŖ│žĪ┴2?ĪĪż╬Ż½é╚ Ī¹źŌ®`ź┐®`ż╦ż─ż╩ż░ Ī¹źŌ®`ź┐®`ż╦ż─ż╩ż░ Ī¹ź░źķź¾ź╔ż╦ż─ż╩ż░ Ī¹Arduino ?źŪźĖź┐źļźįź¾ Ī¹Arduino ?źŪźĖź┐źļźįź¾ ó┘ĮėŠA?ĘĮĘ© ó┌źšźĪź¾ź»źĘźńź¾
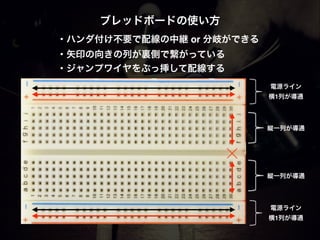
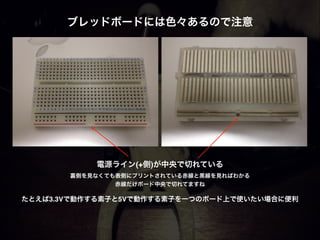
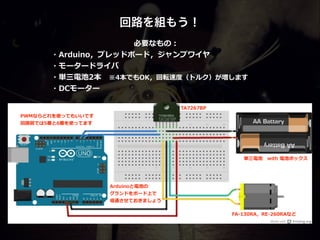
- 18. ╗ž┬Ęż“ĮMżŌż”ŻĪ PWMż╩żķż╔żņż“╩╣ż├żŲżŌżżżżżŪż╣ ? ╗ž┬Ę┬ĘćĒżŪżŽ5Ę¼ż╚6Ę¼ż“╩╣ż├żŲż▐ż╣ Arduinoż╚ļŖ│žż╬ ? ź░źķź¾ź╔ż“ź▄®`ź╔╔ŽżŪ ? ī¦═©żĄż╗żŲż¬żŁż▐żĘżńż” ▒žę¬ż╩żŌż╬Ż║ ? ?ArduinoŻ¼źųźņź├ź╔ź▄®`ź╔Ż¼źĖźŃź¾źūź’źżźõ ? ?źŌ®`ź┐®`ź╔źķźżźą ? ?ģg╚²ļŖ│ž2▒Š?ĪĪĪ∙4▒ŠżŪżŌOKŻ¼╗ž▄×╦┘Č╚Č╚Ż©ź╚źļź»Ż®ż¼ēłżĘż▐ż╣ ? ?DCźŌ®`ź┐®` FA-®\??130RAŻ¼RE-®\??260RAż╩ż╔ TA7267BP ģg╚²ļŖ│ž?ĪĪwith ?ļŖ│žź▄ź├ź»ź╣
- 19. ╗ž┬Ęż“ĮMżŌż”ŻĪ PWMż╩żķż╔żņż“╩╣ż├żŲżŌżżżżżŪż╣ ? ╗ž┬Ę┬ĘćĒżŪżŽ5Ę¼ż╚6Ę¼ż“╩╣ż├żŲż▐ż╣ Arduinoż╚ļŖ│žż╬ ? ź░źķź¾ź╔ż“ź▄®`ź╔╔ŽżŪ ? ī¦═©żĄż╗żŲż¬żŁż▐żĘżńż” ?źŌ®`ź┐®`ż╬źĻ®`ź╔ŠĆż“żĮż╬ż▐ż▐źųźņź├ź╔ź▄®`ź╔ż╦ÆĘż╣ż╬żŽļyżĘżżż╬żŪŻ¼ ? ?ĪĪźĖźŃź¾źūź’źżźõż“?ę╗Šwż╦ÆʿʿŲżóż▓żļż╚żĶżżżŪż╣ ? ? ó┘źĻ®`ź╔ŠĆż“żĘż├ż½żĻōėōėż├żŲŻ©ż═żĖż═żĖżĘżŲŻ®╝Ōżķż╗żļ? ? ó┌źĻ®`ź╔ŠĆż╬Ž╚Č╦ż“źųźņź├ź╔ź▄®`ź╔ż╬ÆĘżĘ?┐┌ż╦╔┘żĘ?╚ļżņżļ ? ? ó█żĮż╬ū┤æBżŪźĖźŃź¾źūź’źżźõż“ÆĘżĘ▐zżÓ FA-®\??130RAŻ¼RE-®\??260RAż╩ż╔ TA7267BP ģg╚²ļŖ│ž?ĪĪwith ?ļŖ│žź▄ź├ź»ź╣ ?ąĪ╝╝
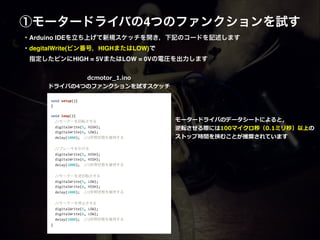
- 21. ó┘źŌ®`ź┐®`ź╔źķźżźąż╬4ż─ż╬źšźĪź¾ź»źĘźńź¾ż“įćż╣ void ?setup(){ ? } ? ? ? void ?loop(){ ? ? ?//źŌ®`ź┐®`ż“╗ž▄׿Ąż╗żļ ? ? ?digitalWrite(5, ?HIGH); ? ? ?digitalWrite(6, ?LOW); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? ? ?//źųźņ®`źŁż“ż½ż▒żļ ? ? ?digitalWrite(5, ?HIGH); ? ? ?digitalWrite(6, ?HIGH); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? ? ? ?//źŌ®`ź┐®`ż“─µ╗ž▄׿Ąż╗żļ ? ? ?digitalWrite(5, ?LOW); ? ? ?digitalWrite(6, ?HIGH); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? ? ? ?//źŌ®`ź┐®`ż“═Żų╣żĄż╗żļ ? ? ?digitalWrite(5, ?LOW); ? ? ?digitalWrite(6, ?LOW); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? } dcmotor_?1.ino ? ź╔źķźżźąż╬4ż─ż╬źšźĪź¾ź»źĘźńź¾ż“įćż╣ź╣ź▒ź├ź┴ ?Arduino IDEż“┴óż┴╔Žż▓żŲą┬ęÄź╣ź▒ź├ź┴ż“ķ_żŁŻ¼Ž┬ėøż╬ź│®`ź╔ż“ėø╩÷żĘż▐ż╣? ?degitalWrite(źįź¾Ę¼║┼Ż¼HIGHż▐ż┐żŽLOW)żŪ! ?ųĖČ©żĘż┐źįź¾ż╦HIGH = 5Vż▐ż┐żŽLOW = 0Vż╬ļŖłRż“│÷┴”żĘż▐ż╣ źŌ®`ź┐®`ź╔źķźżźąż╬źŪ®`ź┐źĘ®`ź╚ż╦żĶżļż╚Ż¼ ? ─µ▄׿Ąż╗żļļHż╦żŽ100ź▐źżź»źĒ├ļŻ©0.1ź▀źĻ├ļŻ®ęį╔Žż╬ ? ź╣ź╚ź├źūĢrķgż“ą«żÓż│ż╚ż¼═ŲŖXżĄżņżŲżżż▐ż╣
- 22. ź╣ź▒ź├ź┴ż╬Ģ°żŁ▐zż▀?╩ųĒś ? (1)źĘźĻźóźļź▌®`ź╚▀xÆk ? ! ! ! ?ź─®`źļĪ·źĘźĻźóźļź▌®`ź╚? ?ĪĪżŪArduinoż¼┐Äż¼ż├żŲżżżļź▌®`ź╚ż“▀xżų ? ! ķg▀`ż├żŲżżżļū┤æBżŪ ? Ģ°żŁ▐zżŌż”ż╚ż╣żļż╚ź©źķ®`ż¼│÷ż▐ż╣
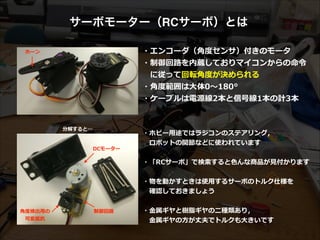
- 23. ź╣ź▒ź├ź┴ż╬Ģ°żŁ▐zż▀ ? (2)ź▐źżź│ź¾ź▄®`ź╔▀xÆk ? ! ?ź─®`źļĪ·ź▐źżź│ź¾ź▄®`ź╔? ?ĪĪżŪ?ūįĘųż╬Arduinoż╚═¼żĖżŌż╬ż“ ? ?ĪĪ▀xżų ? ! ?Unoż╩żķUno ? ?Nanoż╩żķnano ?w/ATmega328 ? ?Leonardoż╩żķLeonardo ? ?Microż╩żķMicro ? ! ?ĪĪķg▀`ż├żŲżļū┤æBżŪĢ°żŁ▐zżŌż” ? ?ĪĪż╚ż╣żļż╚ź©źķ®`ż¼│÷ż▐ż╣ ? ! ż│ż│ż▐żŪżŪżŁż┐żķĢ°żŁ▐zż▀ź▄ź┐ź¾ ? Ż©Ī·ź▄ź┐ź¾Ż®ż“č║ż╣ ?
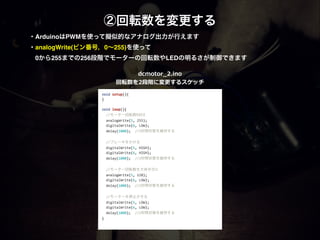
- 24. ó┌╗ž▄×╩²ż“ēõĖ³ż╣żļ void ?setup(){ ? } ? ? ? void ?loop(){ ? ? ?//źŌ®`ź┐®`╗ž▄×╩²MAX ? ? ?analogWrite(5, ?255); ? ? ?digitalWrite(6, ?LOW); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? ? ?//źųźņ®`źŁż“ż½ż▒żļ ? ? ?digitalWrite(5, ?HIGH); ? ? ?digitalWrite(6, ?HIGH); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? ? ? ?//źŌ®`ź┐®`╗ž▄×╩²ż“┤¾╠Õ░ļĘųż╦ ? ? ?analogWrite(5, ?128); ? ? ?digitalWrite(6, ?LOW); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? ? ? ?//źŌ®`ź┐®`ż“═Żų╣żĄż╗żļ ? ? ?digitalWrite(5, ?LOW); ? ? ?digitalWrite(6, ?LOW); ? ? ?delay(1000); ? ?//1├ļķgū┤æBż“ŠS│ųż╣żļ ? ? ? } ? ! ! dcmotor_?2.ino ? ╗ž▄×╩²ż“2Č╬ļAż╦ēõĖ³Ė³ż╣żļź╣ź▒ź├ź┴ ?ArduinożŽPWMż“╩╣ż├żŲöM╦ŲĄ─ż╩źóź╩źĒź░│÷┴”ż¼ąąż©ż▐ż╣! ?analogWrite(źįź¾Ę¼║┼Ż¼0Ī½255)ż“╩╣ż├żŲ! ?0ż½żķ255ż▐żŪż╬256Č╬ļAżŪźŌ®`ź┐®`ż╬╗ž▄×╩²żõLEDż╬├„żļżĄż¼ųŲė∙żŪżŁż▐ż╣?
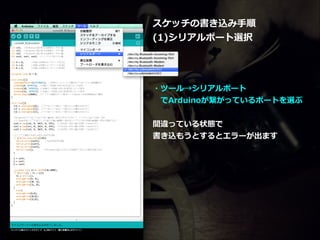
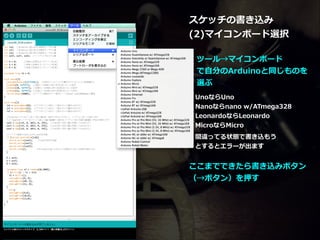
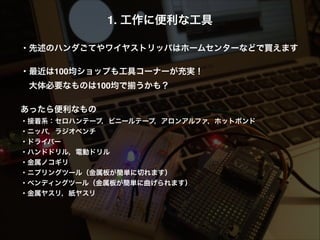
- 25. ?ó█Processingż½żķ╗ž▄×╩²ż“ēõĖ³ż╣żļ int ?speed; ? ? ? void ?setup(){ ? ? ?Serial.begin(9600); ? ?//źĘźĻźóźļ═©ą┼ż“9600bpsżŪķ_╩╝ ? ? ? ? ? } ? ? ? void ?loop(){ ? //źĘźĻźóźļ═©ą┼żŪ╦═żķżņżŲżŁż┐źŪ®`ź┐ż¼żóżņżąęįŽ┬ż“īgąą ? ?if ?(Serial.available()>0){ ? ? ? ? ?speed ?= ?Serial.read(); ? ? ? ? ? ?//ēõ╩²speedż╦╩▄ą┼żĘż┐éÄż“╚ļżņżļ ? ? ? ? ?analogWrite(6, ?speed); ? ? ? ? ? ?//╗ž▄×╩²=speedżŪźŌ®`ź┐®`ż“╗ž▄׿Ąż╗żļ ? ? ? ? ?digitalWrite(5, ?LOW); ? ? ? ?} ? } ? ! ! Arduino ? dcmotor_?3.ino ? źĘźĻźóźļżŪ╩▄ą┼żĘż┐éÄż“╗ž▄×╩²ż╦╩╣ż”ź╣ź▒ź├ź┴ ?źĘźĻźóźļ═©ą┼żŪProcessingż½żķźŌ®`ź┐®`ż╬╗ž▄×╩²ż“ųŲė∙żĘżŲż▀ż▐ż╣? ?Processingż“╩╣ż”ż│ż╚żŪźŁ®`żõGUIż╦żĶżļųŲė∙ż¼║åģgż╦żŪżŁż▐ż╣ import ?processing.serial.*; ?//źĘźĻźóźļ═©ą┼źķźżźųźķźĻż╬źżź¾ź▌®`ź╚ ? Serial ?myPort; ? ? ? //ź¬źųźĖź¦ź»ź╚ēõ╩²ż╬ą¹čį ? int ?ArduinoPortNum ?= ?5; ? ? //ź│ź¾źĮ®`źļż╦▒Ē╩ŠżĄżņż┐ź▌®`ź╚Ę¼║┼ż╦įOČ© ? int ?speed; ? ? ? //╗ž▄×╩²ż╬ēõ╩² ? ? ? void ?setup(){ ? ? ?frameRate(30); ? ? //╗Ł├µż╬źšźņ®`źÓźņ®`ź╚ż“30fpsż╦ ? ? ?size(255, ?300); ? ? //╗Ł├µźĄźżź║ż╬įOČ© ? ? ?println(Serial.list()); ? //ź│ź¾źĮ®`źļż╦ź▌®`ź╚ę╗ėEż“▒Ē╩Š ? ? ?//ź▌®`ź╚Ę¼║┼ArduinoPortNumż“9600bpsżŪź¬®`źūź¾ż╣żļ ? ? ?myPort ?= ?new ?Serial(this, ?Serial.list()[ArduinoPortNum], ?9600); ? } ? ? ? void ?draw(){ ? ? ?background(100,250,250); ? ? ? ? ?stroke(255); ? ? ?line(0,235,250,235); ? ? ?//ź▐ź”ź╣Xū∙ś╦ż“╗ž▄×╩²ż╬éÄż╦╩╣ż” ? ? ?speed ?= ?mouseX; ? ? ? ? ?//ź╣źķźżź└®`ż╚żĘżŲāęż“▒Ē╩Š ? ? ? ? ?fill(0,110,220); ? ? ?ellipse(mouseX,235,10,10); ? ? ?//╗Ł├µż╦╗ž▄×╩²ż╬éÄż“▒Ē╩Šż╣żļ ? ? ?textAlign(CENTER, ?CENTER); ? ? ?text("speed",width/2,80); ? ? ? ? ?text(speed,width/2,100); ? ? ?//╗ž▄×╩²ż╬éÄż“╦═ą┼ ? ? ?myPort.write(speed); ? } ? ! ! ! Processing ? dcmotorController.pde ? ź▐ź”ź╣ū∙ś╦ż“Arduinoż╦╦═ą┼ż╣żļź╣ź▒ź├ź┴ źĘźĻźóźļ═©ą┼ż╦ż─żżżŲżŽŪ░╗žź’®`ź»źĘźńź├źū┘Y┴Žż╦żĶżĻįö╝Üż╩šh├„ż¼żóżĻż▐ż╣! ż╬żŪ▓╬┐╝ż╦żĘżŲż▀żŲż»ż└żĄżż? http://coma.io/coma-study-room-vol-1/ ź▐ź”ź╣ż“äėż½ż╣ż╚? źŌ®`ź┐®`ż╬╗ž▄×╩²ż¼ēõż’żĻż▐ż╣
- 27. źĄ®`ź▄źŌ®`ź┐®`Ż©RCźĄ®`ź▄Ż®ż╚żŽ ?ź©ź¾ź│®`ź└Ż©?ĮŪČ╚Č╚ź╗ź¾źĄŻ®ĖČżŁż╬źŌ®`ź┐ ? ?ųŲė∙╗ž┬Ę┬Ęż“─┌╩iżĘżŲż¬żĻź▐źżź│ź¾ż½żķż╬├³┴Ņ┴Ņ ? ?ĪĪż╦ÅŠż├żŲ╗ž▄×?ĮŪČ╚Č╚ż¼øQżßżķżņżļ ? ??ĮŪČ╚Č╚╣ĀćņżŽ?┤¾╠Õ0?Ī½180ĪŃ ? ?ź▒®`źųźļżŽļŖį┤ŠĆ2▒Šż╚ą┼║┼ŠĆ1▒Šż╬ėŗ3▒Š ĘųĮŌż╣żļż╚ĪŁ ?ĮŪČ╚Č╚Ś╩│÷?ė├ż╬ ? ź▌źŲź¾źĘźńźß®`ź┐ DCźŌ®`ź┐®` ųŲė∙╗ž┬Ę┬Ę ź█®`ź¾ ?ź█źė®`?ė├═ŠżŪżŽźķźĖź│ź¾ż╬ź╣źŲźóźĻź¾ź░Ż¼ ? ?ĪĪźĒź▄ź├ź╚ż╬ķv╣Øż╩ż╔ż╦╩╣ż’żņżŲżżż▐ż╣ ? ! ?ĪĖRCźĄ®`ź▄Ī╣żŪŚ╩╦„╦„ż╣żļż╚?╔½ż¾ż╩╔╠ŲĘż¼?ęŖęŖĖČż½żĻż▐ż╣ ? ! ?╬’ż“äėż½ż╣ż╚żŁżŽ╩╣?ė├ż╣żļźĄ®`ź▄ż╬ź╚źļź»╩╦śöż“ ? ?ĪĪ┤_šJżĘżŲż¬żŁż▐żĘżńż” ? ! ??ĮĮ╩¶ź«źõż╚śõų¼ź«źõż╬?Č■ĘNŅÉżóżĻŻ¼ ? ?ĪĪ?ĮĮ╩¶ź«źõż╬?ĘĮż¼š╔Ę“żŪź╚źļź»żŌ?┤¾żŁżżżŪż╣
- 28. ╗ž┬Ęż“ĮMżŌż”ŻĪ ?═Ō▓┐źąź├źŲźĻ®`ż╚ą┼║┼ŠĆż“ż─ż╩ż░ż└ż▒ ? ?īgżŽźĄ®`ź▄1éĆ│╠Č╚Č╚żŪżóżņżą═Ō▓┐ļŖį┤ż╩żĘżŪArduinoż└ż▒żŪ▓┘ū„żŪżŁż▐ż╣ż¼Ż¼ ? ?ĪĪDCźŌ®`ź┐®`ż╬ł÷║Žż╚═¼żĖżŪļŖ┴„┴„žō║╔ż¼?┤¾żŁżżż╬żŪż¬ż╣ż╣żßżŽżĘż▐ż╗ż¾ ?│ÓŻ║═Ō▓┐ļŖį┤ż╬+ż╦ ? ?³\Ż║═Ō▓┐ļŖį┤ż╬-®\??ż╦? żĮż╬╦¹ż╬?╔½Ż©?░ūżõź¬źņź¾źĖż└ż├ż┐żĻżĘż▐ż╣Ż®Ż║Arduinoż╬źŪźĖź┐źļźįź¾ż╦ źŪźĖź┐źļ2Ę¼źįź¾ż╦ĮėŠAżĘżŲżżż▐ż╣ ?┤¾╠Õż╬RCźĄ®`ź▄żŪ▒žę¬ļŖłRżŽ5V│╠Č╚Č╚żŪż╣ ? Į±╗žģg╚²ļŖ│ž2▒ŠŻĮ3Vż╩ż╬żŪ ? īgżŽż┴żńż├ż╚?ūŃżĻż╩żżżŪż╣ ? Arduinoż╚ļŖ│žż╬ź░źķź¾ź╔(-®\??é╚)żŽī¦═©żĄż╗ż▐ż╣ ?
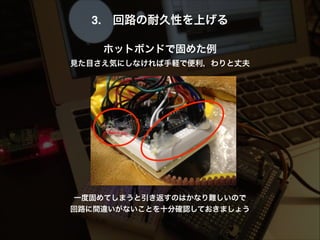
- 29. ó┘RCźĄ®`ź▄ż“äėż½żĘżŲż▀żĶż” #include ?<Servo.h> ? //źĄ®`ź▄źķźżźųźķźĻż“╩╣ė├ż╣żļ ? Servo ?servo0; ? ? //źżź¾ź╣ź┐ź¾ź╣ż╬ū„│╔ ? /*č}╩²ż╬źĄ®`ź▄ż“ÆQż”ł÷║ŽżŽŻ¼«Éż╩żļ├¹Ū░ż╬źżź¾ź╣ź┐ź¾ź╣ż“£╩éõ ? Servo ?servo1; ? ? //2éĆ─┐ż╬źĄ®`ź▄ ? Servo ?servo2; ? ? //3éĆ─┐ż╬źĄ®`ź▄ ? */ ? ? ? void ?setup(){ ? ? ?servo0.attach(2); ? //źĄ®`ź▄źŌ®`ź┐ą┼║┼ŠĆż“ż─ż╩ż░źįź¾ż“2Ę¼ źįź¾ż╦ųĖČ© ? } ? ? ? void ?loop(){ ? ? ?servo0.write(90); ? //╗ž▄×ĮŪČ╚ż“0ĪŃĪ½180ĪŃż╬╣ĀćņżŪųĖČ© ? } ? ! ! Servo_?1.ino ? ╗ž▄×?ĮŪČ╚Č╚ż“1ż─ż└ż▒ź╗ź├ź╚ż╣żļ ?Arduino IDEż“┴óż┴╔Žż▓żŲą┬ęÄź╣ź▒ź├ź┴ż“ķ_żŁŻ¼Ž┬ėøż╬ź│®`ź╔ż“ėø╩÷żĘż▐ż╣? ?ServoźķźżźųźķźĻż“╩╣ż”ż│ż╚żŪ0Ī½180ĪŃż╬╣ĀćņżŪĮŪČ╚ż“ųĖČ©żŪżŁż▐ż╣ #include ?<Servo.h> ? ?//źĄ®`ź▄źķźżźųźķźĻż“╩╣ė├ż╣żļ ? Servo ?servo0; ? ? ? ? ? ? ?//źżź¾ź╣ź┐ź¾ź╣ż╬ū„│╔ ? ? ? void ?setup(){ ? ? ?servo0.attach(2); ? ?//źĄ®`ź▄źŌ®`ź┐ą┼║┼ŠĆż“ż─ż╩ż░źįź¾ż“2Ę¼ źįź¾ż╦ųĖČ© ? } ? ? ? void ?loop(){ ? ? ?servo0.write(90); ? ?//╗ž▄×ĮŪČ╚ż“90ĪŃż╦ź╗ź├ź╚ ? ? ?delay(500); ? ? ? ? ? ? ? ?//500ź▀źĻ├ļ┤²ż─ ? ? ? ? ? ?servo0.write(180); ?//╗ž▄×ĮŪČ╚ż“180ĪŃż╦ź╗ź├ź╚ ? ? ?delay(500); ? ? ? ? ? ? ? ?//500ź▀źĻ├ļ┤²ż─ ? ? ? ? ? ?servo0.write(0); ? ? ?//╗ž▄×ĮŪČ╚ż“0ĪŃż╦ź╗ź├ź╚ ? ? ?delay(500); ? ? ? ? ? ? ? ?//500ź▀źĻ├ļ┤²ż─ ? } ? ! ! Servo_?2.ino ? żżż»ż─ż½╗ž▄×?ĮŪČ╚Č╚ż“ēõż©żŲż»żĻĘĄżĘäėż½ż╣ ź█®`ź¾ż╬╚ĪżĻĖČż▒?ĮŪČ╚Č╚ż“ ? øQżßżļż╚żŁż╦▒Ń▒Ń└¹└¹żŪż╣
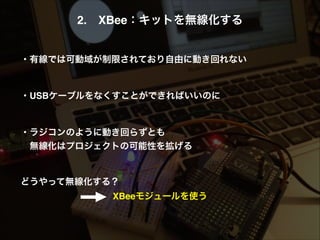
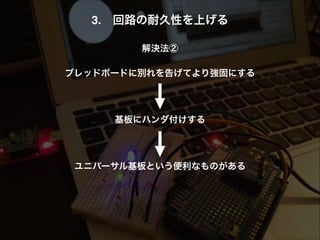
- 30. ó┌Processingż½żķźĄ®`ź▄ż“äėż½ż╣ #include ?<Servo.h> ? //źĄ®`ź▄źķźżźųźķźĻż“╩╣ė├ż╣żļ ? Servo ?servo0; ? ? //źżź¾ź╣ź┐ź¾ź╣servo0ż“ū„żļ ? ? ? int ?deg; ? ? //ĮŪČ╚ż╬ēõ╩²degż“ą¹čį ? ? ? ? ? void ?setup(){ ? ? ?servo0.attach(2); ? //źĄ®`ź▄źŌ®`ź┐ą┼║┼ŠĆż“ż─ż╩ż░źįź¾ż“2Ę¼źįź¾ż╦ųĖČ© ? ? ?Serial.begin(9600); ?//źĘźĻźóźļ═©ą┼ż“9600bpsżŪķ_╩╝ ? ? ? } ? ? ? void ?loop(){ ? ? ?//źĘźĻźóźļ═©ą┼żŪ╦═żķżņżŲżŁż┐źŪ®`ź┐ż¼żóżņżąęįŽ┬ż“īgąą ? ? ?if ?(Serial.available()>0){ ? ? ? ? ?deg ?= ?Serial.read(); ? ?//źĘźĻźóźļ═©ą┼żŪ╦═żķżņżŲżŁż┐źŪ®`ź┐ż“degż╦┤·╚ļ ? ? ? ? ?servo0.write(deg); ? ? ? ?//źĄ®`ź▄źŌ®`ź┐ż╬╗ž▄×ĮŪČ╚ż“degż╦ź╗ź├ź╚ ? ? ?} ? } ? ! ! ?DCźŌ®`ź┐®`żŪżõż├ż┐ż│ż╚ż╚╗∙▒ŠĄ─ż╦ę╗ŠwżŪż╣ import ?processing.serial.*; ? //źĘźĻźóźļ═©ą┼źķźżźųźķźĻż╬źżź¾ź▌®`ź╚ ? Serial ?myPort; ? ? ? //ź¬źųźĖź¦ź»ź╚ēõ╩²ż╬ą¹čį ? int ?ArduinoPortNum ?= ?5; ? ? //ź│ź¾źĮ®`źļż╦▒Ē╩ŠżĄżņż┐ź▌®`ź╚Ę¼║┼ż╦įO Č© ? int ?degree; ? ? ? //ĮŪČ╚ż╬ēõ╩² ? ? ? void ?setup(){ ? ? ?frameRate(30); ? ? //╗Ł├µż╬źšźņ®`źÓźņ®`ź╚ż“30fpsż╦ ? ? ?size(220, ?300); ? ? //╗Ł├µźĄźżź║ż╬įOČ© ? ? ?println(Serial.list()); ?//ź│ź¾źĮ®`źļż╦ź▌®`ź╚ę╗ėEż“▒Ē╩Š ? ? ?//ź▌®`ź╚Ę¼║┼ArduinoPortNumż“9600bpsżŪź¬®`źūź¾ż╣żļ ? ? ?myPort ?= ?new ?Serial(this, ?Serial.list()[ArduinoPortNum], ?9600); ? } ? ? ? void ?draw(){ ? ? ?background(100,250,250); ? ? ? ? ?stroke(255); ? ? ?line(0,235,250,235); ? ? ?fill(0,110,220); ? ? ? ? ?textAlign(CENTER, ?CENTER); ? ? ?text("degree",width/2,80); ? ? ?//ź▐ź”ź╣ū∙ś╦ż“źĄ®`ź▄ż╬╗ž▄×ĮŪČ╚ż╦╩╣ż” ? ? ?if(20<=mouseX ?&& ?mouseX<=200){ ? ? ? ? ?degree ?= ?mouseX-?®\20; ? ? ? ? ?ellipse(mouseX,235,10,10); ? ? ? ? ?text(degree,width/2,100); ? ? ?} ? ? ? ? ?if(20>mouseX){ ? ? ? ? ?degree ?= ?0; ? ? ? ? ?ellipse(20,235,10,10); ? ? ? ? ?text(degree,width/2,100); ? ? ?} ? ? ? ? ?if(200<mouseX){ ? ? ? ? ?degree ?= ?180; ? ? ? ? ?ellipse(200,235,10,10); ? ? ? ? ?text(degree,width/2,100); ? ? ?} ? ? ?myPort.write(degree); ? //╗ž▄×ĮŪČ╚degreeż“╦═ą┼ ? } ? Arduino ? servo_?3.ino ? źĘźĻźóźļżŪ╩▄ą┼żĘż┐éÄż“╗ž▄×?ĮŪČ╚Č╚ż╦╩╣ż”ź╣ź▒ź├ź┴ Processing ? servoController.pde ? ź▐ź”ź╣ū∙ś╦ż“0?Ī½180ż╬╣ĀćņżŪArduinoż╦╦═ą┼ ź▐ź”ź╣ż“äėż½ż╣ż╚? źĄ®`ź▄ż╬?ĮŪČ╚Č╚ż¼ēõż’żĻż▐ż╣
- 31. 5.!! ÅĻė├└²
- 32. ó┘ŠÓļxź╗ź¾źĄż╚ż╬▀Bą» └²└²Ż║Šė├▀żĻĘ└?ų╣źįź│źįź│źŽź¾ź▐®` ŠÓļxļxź╗ź¾źĄ? Ż©╗·ż╬╔Žż╦įOų├Ż® RCźĄ®`ź▄ źįź│źįź│ ? źŽź¾ź▐®` Arduino? ?ęŖęŖŪąŪążņżŲż▐ż╣ šš├„?ė├ź╣ź┐ź¾ź╔ ?Ņ^ż¼┤╣żņżļäėū„ż“ŠÓļxļxź╗ź¾źĄżŪŚ╩│÷ż╣żļŠė├▀żĻŚ╩│÷źĘź╣źŲźÓ ? ! ?ŠÓļxļxź╗ź¾źĄż╚Ņ^ż╚ż╬ŠÓļxļxż¼?ę╗Č©éÄęįŽ┬ż╦ż╩żļż╚źĄ®`ź▄ż¼äėū„ ? ! ?źżź¾ź┴źŁż»żĄżż?ĘĮĘ©żŪż╣ż¼Ż©ż▐żĪźżź¾ź┴źŁż╩ż╬żŪż╣ż¼Ż®Ż¼ ? ?ĪĪź¼ź┴ż╩Šė├▀żĻŚ╩│÷Ę©ż╦ż¬żżżŲżŌ ? ?ĪĪ├▀Ü▌żĮż╬żŌż╬ż“ėŗ£yżĘżŲżżżļż╬żŪżŽż╩ż»Ż¼ ? ?ĪĪ├▀Ü▌ż╚ŽÓķvż╬żóżļ╬’└Ē└Ē┴┐┴┐ż“ėŗ£yżĘżŲżżż▐ż╣ ? ?ĪĪŻ©?▄ć▄ćż╬▓┘┐kźčź┐®`ź¾żõ?ą─┼─Ż¼?謳RŻ¼║¶╬³żõč█Ū“▀\äėż╩ż╔Ż® ? ! ?10Ęųżóżņżąū„│╔┐╔─▄ Šė├▀żĻż╣żļż╚Ņ^ż“▀ĄżżżŲŲż│żĘżŲż»żņż▐ż╣ ▀Ąż»ŻĪ
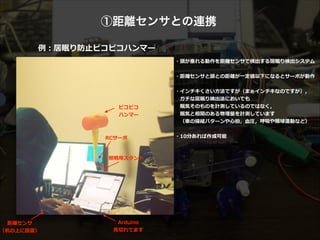
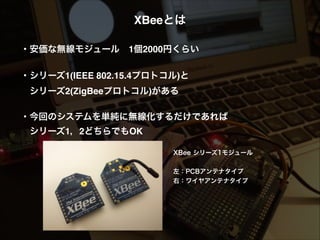
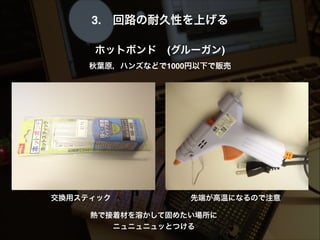
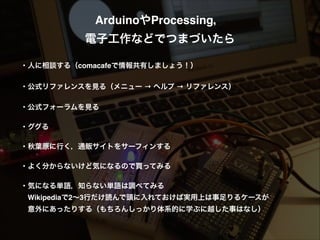
- 33. ó┘ŠÓļxź╗ź¾źĄż╚ż╬▀Bą» Šė├▀żĻĘ└?ų╣źįź│źįź│źŽź¾ź▐®`ż╬ź╣ź▒ź├ź┴ż╚╗ž┬Ę┬Ę/*ŠÓļxź╗ź¾źĄżŽźĘźŃ®`źū£yŠÓźŌźĖźÕ®`źļGP2Y0A21YKż“╩╣ė├*/ ? #include ?<Servo.h> ? ?//źĄ®`ź▄źķźżźųźķźĻż╬źżź¾ź▌®`ź╚ ? Servo ?servo0; ? ?//źżź¾ź╣ź┐ź¾ź╣servo0ż“ū„│╔ ? int ?sensorPin ?= ?0; ? ?//źóź╩źĒź░0Ę¼źįź¾(A0)ż“ŠÓļxź╗ź¾źĄż╚ĮėŠA ? int ?sensorValue ?= ?0; ? ?//ź╗ź¾źĄż╬šiż▀╚ĪżĻéÄż“╚ļżņżļēõ╩² ? int ?tempValue ?= ?0; ? ?//ź╗ź¾źĄż╬šiż▀╚ĪżĻéÄż“╚ļżņżļēõ╩² ? ? ? void ?setup(){ ? ? ?Serial.begin(9600); ? ?//źĘźĻźóźļ═©ą┼ż“ķ_╩╝ ? ? ?servo0.attach(2); ? ?//źŪźĖź┐źļ2Ę¼źįź¾ż╦źĄ®`ź▄ż“ż─ż╩ż░ ? } ? ? ? void ?loop(){ ? ? ?sensorValue ?= ?analogRead(sensorPin); ? ?//ź╗ź¾źĄéÄż╬šiż▀╚ĪżĻ ? ? ?tempValue ?= ?sensorValue; ? ?//tempValueż╦éÄż“▒Ż╣▄ ? ? ? ? ?/*ŠÓļxż¼Į³▀^ż«ż┐ż╚żŁź╗ź¾źĄż╬éÄż¼░k╔óż╣żļż│ż╚ż“¤oęĢ*/ ? ? ?if ?(sensorValue ?< ?70){ ? ? ? ? ?sensorValue ?= ?70; ? ? ?} ? ? ?else{ ? ? ? ? ?sensorValue ?= ?tempValue; ? ? ?} ? ? ?/*ŠÓļxź╗ź¾źĄż╬šiż▀╚ĪżĻéÄż“ŠÓļx[cm]ż╦ēõōQ*/ ? ? ?int ?range ?= ?(6787 ?/ ?( ?sensorValue ?-?®\ ?3)) ?-?®\ ?4; ? ? ?/*źĘźĻźóźļźŌź╦ź┐ż╦ēõōQßßż╬ŠÓļx[cm]ż╚╔·źŪ®`ź┐ż“▒Ē╩Š*/ ? ? ?Serial.print(range); ? ? ?Serial.print(" ?, ?"); ? ? ?Serial.print(sensorValue); ? ? ?Serial.print("na"); ? ? ?/*īØŽ¾╬’ż╚ź╗ź¾źĄż╚ż╬ŠÓļxż¼20cmęįŽ┬ż╬ż╚żŁźĄ®`ź▄ż“äėū„*/ ? ? ? ? ?if ?(range ?< ?20){ ? ? ? ? ?servo0.write(110); ? ? ? ? ?delay(500); ? ? ? ? ?servo0.write(10); ? ? ? ? ?delay(1500); ? ? ? ? ?servo0.write(110); ? ? ? ? ?delay(100); ? ? ?} ? ? ?else{ ? ? ? ? ?servo0.write(90); ? ? ?} ? } ŠÓļxļxź╗ź¾źĄŻ║źĘźŃ®`źū£yŠÓźŌźĖźÕ®`źļGPY0A21YK ? żĄżŁż█ż╔ĮMż¾ż└RCźĄ®`ź▄ż╬╗ž┬Ę┬Ęż“żĮż╬ż▐ż▐╩╣żżż▐ż╣ ? ŠÓļxļxź╗ź¾źĄżŽźĘźŃ®`źū£yŠÓźŌźĖźÕ®`źļGPY0A21YKŻ©1éĆ400ā꯮ż“╩╣?ė├ ?░ūŻ║ź╗ź¾źĄ│÷?┴”┴” ? ?│ÓŻ║ź░źķź¾ź╔ ? ! ?³\Ż║Vcc(5V) ? ą┤šµż╬żĶż”ż╦Ż¼ ? ą░ÉÖż╩┼õŠĆ?╔½╩╦śöż╦ż╩ż├żŲżżżļż╬żŪ ? ┼õŠĆĢrż╦żŽķg▀`ż©ż╩żżżĶż” ? ż┤ūóęŌż»ż└żĄżż
- 34. ó┌궿╚ż╬▀Bą» └²└²Ż║ż¬ż╔żļż╠żżż░żļż▀ ?RGB-®\??LEDżŌ╩╣?ė├żĘż┐ż┐żßArduino1╠©żŪżŽźįź¾╩²ż¼?ūŃżĻż║Ż¼ ? ?ĪĪ2╠©ż╬Arduinoż“═¼Ų┌żĄż╗żļż│ż╚żŪīØÅĻżĘż▐żĘż┐ ? ?ĪĪ╦¹ż╦żŌż├ż╚ź╣ź▐®`ź╚ż╩żõżĻ?ĘĮżŽżóżļż½żŌżĘżņż▐ż╗ż¾ ? ?ProcessingżŪż╬ź¬®`źŪźŻź¬źķźżźųźķźĻminimż╬╩╣?ė├ż╦ż─żżżŲżŽ ? ?ĪĪŪ░╗žź’®`ź»źĘźńź├źū┘Y┴Ž┴Žż╦ėø╩÷żĘżŲżżż▐ż╣ üI?╩ų?üI?ūŃż╦RCźĄ®`ź▄ż“ź╗ź├ź╚ ? DCźŌ®`ź┐®`1éĆżŪäėż»ż¬ż╔żļż¬żŌż┴żŃż“źŽź├ź» ? Ż©źŪźšź®źļź╚żŪżŽ?ę╗Č©ż╬źŲź¾ź▌żŪżĘż½ż¬ż╔żņż╩żżŻ® ? I2CżŪ═¼Ų┌ ? źĘźĻźóźļ═©ą┼ ? ź▐źżź»ż½żķż╬?ę¶?╚ļ?┴”┴”ż“? ź¬®`źŪźŻź¬źķźżźųźķźĻż“╩╣ż├żŲĘų╬÷ ? źĄ®`ź▄ųŲė∙ ? DCźŌ®`ź┐®`ųŲė∙ ?
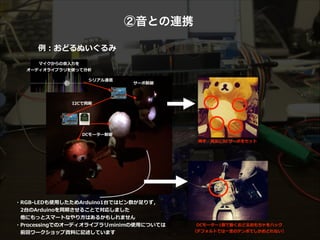
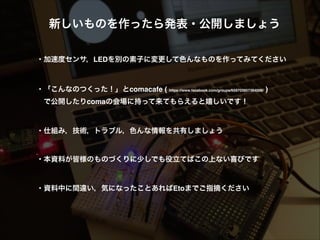
- 35. ó█ż┴żńż├ż╚ż└ż▒č}ļjż╩ųŲė∙ └²└²Ż║īØŽ¾ż“ūĘ╬▓ż╣żļźĒź▄ź├ź╚źó®`źÓ ?Processingż╬źĄź¾źūźļReach ?2 ?http://www.processing.org/examples/reach2.html ? ?Ž╚Č╦ż¼ź▐ź”ź╣ū∙ś╦ż“ūĘżżż½ż▒żļČÓķv╣ØźŌźŪźļ ? ! ! ! ! ! ! ! ! ! ! ųą?╔Ēż“ęįŽ┬ż╬żĶż”ż╦Ė─įņŻ║ ? ?īgļHż╬RCźĄ®`ź▄ż╬éĆ╩²ż╚ķv╣Ø╩²ż“?ę╗ų┬żĄż╗żŲ ? ?ĪĪļO²ĀżĻ║Žż”źĄ®`ź▄ķgż╬ŽÓīØĄ─ż╩?ĮŪČ╚Č╚[ĪŃ]ż“╚ĪĄ├żĘŻ¼ ? ?ĪĪźĘźĻźóźļżŪArduinożž╦═ą┼ ? ! ?ź½źßźķżŪšJūRūRżĘż┐īØŽ¾ż“ūĘż’ż╗ż┐żĻŻ¼ ? ?ĪĪKinectżõLeapż╚▀Bą»żĄż╗żŲźóźąź┐®`źĒź▄ź├ź╚ż“ū„żļż│ż╚ż¼┐╔─▄? ?ĪĪŻ©?ūįĘųż¼?╩ųż“š±żļż╚?╩ųż“š±żĻż½ż©ż╣źĒź▄ź├ź╚ż╩ż╔Ż® ? ! ?Processingż╦żŽ╦¹ż╦żŌźßź½ż“ū„żļ╔ŽżŪ▒Ń▒Ń└¹└¹ż╩źĄź¾źūźļż¼ż┐ż»żĄż¾żóżĻż▐ż╣ RCźĄ®`ź▄ż╚źóźżź╣ż╬░¶żŪųŲū„żĘż┐└²└² ?
- 40. ▒žę¬ż╩▓┐ŲĘę╗ėE! ! ó┘XBee źĘźĻ®`ź║1źŌźĖźÕ®`źļ! ! ! ! ! ! 2éĆ! ! ó┌XBee ź©ź»ź╣źūźĒ®`źķUSBź╔ź¾ź░źļ! ! ! ! 1éĆ! ?ż▐ż┐żŽXBee USBźóź└źūź┐ż╩ż╔! ! ó█XBee 2.54mmźįź├ź┴ēõōQ╗∙░Õ! ! ! ! ! 1éĆ! ?Ī∙źŽź¾ź└ĖČż▒▒žę¬! ?XBeeżŽż│żņż“ķgż╦ą«ż▐ż╩żżż╚źųźņź├ź╔ź▄®`ź╔ż╦ÆĘż╗ż╩żż! ó┘ ó┌ ó█
- 49. ArduinożõProcessingŻ¼! ļŖūė╣żū„ż╩ż╔żŪż─ż▐ż┼żżż┐żķ! ! ?╚╦ż╦ŽÓšäż╣żļŻ©comacafeżŪŪķł¾╣▓ėążĘż▐żĘżńż”ŻĪŻ®! ! ?╣½╩ĮźĻźšźĪźņź¾ź╣ż“ęŖżļŻ©źßź╦źÕ®` Ī· źžźļźū Ī· źĻźšźĪźņź¾ź╣Ż®! ! ?╣½╩Įźšź®®`źķźÓż“ęŖżļ! ! ?ź░ź░żļ! ! ?Ū’╚~įŁż╦ąąż»Ż¼═©ž£źĄźżź╚ż“źĄ®`źšźŻź¾ż╣żļ! ! ?żĶż»Ęųż½żķż╩żżż▒ż╔Ü▌ż╦ż╩żļż╬żŪ┘Iż├żŲż▀żļ! ! ?Ü▌ż╦ż╩żļģgšZŻ¼ų¬żķż╩żżģgšZżŽš{ż┘żŲż▀żļ! ?WikipediażŪ2Ī½3ąąż└ż▒šiż¾żŪŅ^ż╦╚ļżņżŲż¬ż▒żąīgė├╔ŽżŽ╩┬ūŃżĻżļź▒®`ź╣ż¼! ?ęŌ═Ōż╦żóż├ż┐żĻż╣żļŻ©żŌż┴żĒż¾żĘż├ż½żĻ╠ÕŽĄĄ─ż╦覿ųż╦įĮżĘż┐╩┬żŽż╩żĘŻ®! !
- 50. ą┬żĘżżżŌż╬ż“ū„ż├ż┐żķ░k▒Ē?╣½ķ_żĘż▐żĘżńż”! ! ! ?źŌ®`ź┐®`żõź╗ź¾źĄż╬ĮMż▀║Žż’ż╗żŪ╔½ż¾ż╩żŌż╬ż“ū„ż├żŲż▀żŲż»ż└żĄżż! ! ! ?ĪĖż│ż¾ż╩ż╬ż─ż»ż├ż┐ŻĪĪ╣ż╚comacafe ( https://www.facebook.com/groups/659703957384006/ )? ?żŪ╣½ķ_żĘż┐żĻcomaż╬╗ßł÷ż╦│ųż├żŲ└┤żŲżŌżķż©żļż╚µężĘżżżŪż╣ŻĪ! ! ! ?╩╦ĮMż▀Ż¼╝╝ągŻ¼ź╚źķźųźļŻ¼╔½ż¾ż╩Ūķł¾ż“╣▓ėążĘż▐żĘżńż”! ! ! ?▒Š┘Y┴Žż¼Įįśöż╬żŌż╬ż┼ż»żĻż╦╔┘żĘżŪżŌę█┴óżŲżąż│ż╬╔Žż╩żżŽ▓żėżŪż╣! ! ! ?┘Y┴Žųąż╦ķg▀`żżŻ¼Ü▌ż╦ż╩ż├ż┐ż│ż╚żóżņżąEtoż▐żŪż┤ųĖš¬ż»ż└żĄżż