






















Content 1324912481
- 1. ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł ( Simple harmonic motion ) (SHM )
- 2. ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł ( Simple harmonic motion ) (SHM ) ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ĆÓĖøÓ╣ć ÓĖÖÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖ Ó╣ł Ó╣ł ÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖźÓĖüÓĖ®ÓĖōÓĖ░ÓĖ¬ÓĖ▒Ó╣łÓĖÖÓĖ½ÓĖŻÓĖĘÓĖŁÓ╣üÓĖüÓĖ¦Ó╣łÓĖć (vibration ) Ó╣éÓĖöÓĖóÓĖĪÓĖĄÓĖŖÓ╣łÓĖ¦ÓĖćÓĖüÓĖ¦Ó╣ēÓĖ▓ÓĖćÓĖ¬ÓĖ╣ ÓĖćÓĖ¬ÓĖĖ ÓĖö ÓĖ▒ ÓĖéÓĖŁÓĖćÓĖüÓĖ▓ÓĖŻÓĖ¬ÓĖ▒Ó╣łÓĖÖÓĖ½ÓĖŻÓĖĘÓĖŁÓ╣üÓĖüÓĖ¦Ó╣łÓĖćÓĖäÓĖćÓĖŚÓĖĄÓ╣ł Ó╣ĆÓĖŻÓĖĄÓĖóÓĖüÓĖŖÓ╣ł ÓĖ¦ÓĖćÓĖüÓĖ¦Ó╣ēÓĖ▓ÓĖćÓĖ¬ÓĖ╣ ÓĖćÓĖ¬ÓĖĖ ÓĖöÓĖÖÓĖĄÓĖ¦Ó╣łÓĖ▓ ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö Ó╣ē (Amplitude) ÓĖüÓĖ▓ÓĖŻÓĖ¬ÓĖ▒Ó╣łÓĖÖÓĖ½ÓĖŻÓĖĘÓĖŁÓ╣üÓĖüÓĖ¦Ó╣łÓĖćÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖĢÓĖ▓ÓĖĪÓĖśÓĖŻÓĖŻÓĖĪÓĖŖÓĖ▓ÓĖĢÓĖ┤ÓĖĪÓĖ▒ÓĖüÓĖłÓĖ░ ÓĖĪÓĖĄÓĖŁÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖöÓ╣äÓĖĪÓ╣ł ÓĖäÓĖćÓĖŚÓĖĄÓ╣ł Ó╣ĆÓĖŻÓĖ▓ÓĖŁÓĖ▓ÓĖłÓĖ×ÓĖ┤ÓĖłÓĖ▓ÓĖŻÓĖōÓĖ▓Ó╣āÓĖÖÓĖŖÓ╣ł ÓĖ¦ÓĖćÓĖŻÓĖŁÓĖÜÓ╣äÓĖĪÓ╣ł ÓĖĪÓĖ▓ÓĖü Ó╣ĆÓĖøÓ╣ć ÓĖÖÓĖüÓĖ▓ÓĖŻ ÓĖ▒ Ó╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖÖÓĖĄÓ╣äÓĖöÓ╣ē Ó╣ĆÓĖŖÓ╣ł ÓĖÖ ÓĖüÓĖ▓ÓĖŻÓ╣üÓĖüÓĖ¦Ó╣łÓĖćÓĖéÓĖŁÓĖćÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓĖÖÓĖ▓ÓĖ¼ÓĖ┤ ÓĖüÓĖ▓ ÓĖüÓĖ▓ÓĖŻÓ╣üÓĖüÓĖ¦Ó╣łÓĖć Ó╣ł Ó╣ē ÓĖéÓĖŁÓĖćÓĖŖÓĖ┤ÓĖćÓĖŖÓ╣ē ÓĖ▓ÓĖüÓĖ▓ÓĖŻÓĖ¬ÓĖ▒Ó╣łÓĖÖÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖŚÓĖĄÓ╣łÓĖóÓĖöÓĖĢÓĖ┤ÓĖöÓĖüÓĖ▒ÓĖÜÓĖ¬ÓĖøÓĖŻÓĖ┤ÓĖć Ó╣ĆÓĖøÓ╣ć ÓĖÖÓĖĢÓ╣ē ÓĖÖ ÓĖČ
- 3. Ó╣āÓĖÖÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖ┤ÓĖłÓĖ▓ÓĖŻÓĖōÓĖ▓ÓĖ¬ÓĖĪÓĖüÓĖ▓ÓĖŻÓĖŚÓĖĄÓ╣łÓ╣üÓĖ¬ÓĖöÓĖćÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖéÓĖŁÓĖć ÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ĆÓĖŻÓĖ▓ÓĖ¬ÓĖ▓ÓĖĪÓĖ▓ÓĖŻÓĖ¢ Ó╣ł ÓĖ×ÓĖ┤ÓĖłÓĖ▓ÓĖŻÓĖōÓĖ▓Ó╣éÓĖöÓĖóÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖŚÓĖĄÓĖóÓĖÜÓĖüÓĖ▒ÓĖÜÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖŚÓĖĄÓ╣ł Ó╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖ¦ÓĖćÓĖüÓĖźÓĖĪ Ó╣éÓĖöÓĖóÓĖüÓĖ▓ÓĖŻÓĖēÓĖ▓ÓĖóÓĖĀÓĖ▓ÓĖ×ÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓ╣āÓĖ½Ó╣ē Ó╣ł ÓĖøÓĖŻÓĖ▓ÓĖüÓĖÅÓ╣ĆÓĖćÓĖ▓ÓĖéÓĖČÓĖÖÓĖÜÓĖÖÓĖēÓĖ▓ÓĖü Ó╣ĆÓĖĪÓĖĘÓ╣łÓĖŁÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖøÓ╣ć ÓĖÖÓ╣üÓĖÜÓĖÜ Ó╣ē Ó╣ł ÓĖ¦ÓĖćÓĖüÓĖźÓĖĪ Ó╣ĆÓĖćÓĖ▓ÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖłÓĖ░Ó╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖüÓĖźÓĖ▒ÓĖÜÓ╣äÓĖøÓĖĪÓĖ▓Ó╣āÓĖÖÓĖźÓĖ▒ÓĖüÓĖ®ÓĖōÓĖ░ Ó╣ł Ó╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä ÓĖöÓĖ▒ÓĖćÓĖÖÓĖĄÓ╣ē
- 4. Simple harmonic motion ( SHM ) ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö ( A ) ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö ( A ) ÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖøÓĖźÓĖ▓ÓĖóÓĖ¬ÓĖĖ ÓĖö ÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖøÓĖźÓĖ▓ÓĖóÓĖ¬ÓĖĖ ÓĖö ÓĖüÓĖ▓ÓĖŻÓĖüÓĖŻÓĖ░ÓĖłÓĖ▒ÓĖöÓĖĪÓĖ▓ÓĖüÓĖ¬ÓĖĖ ÓĖö = A ÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖ¬ÓĖĪÓĖöÓĖĖÓĖź ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ćÓĖ¦ = 0 ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ł ÓĖćÓĖĪÓĖ▓ÓĖüÓĖ¬ÓĖĖ ÓĖö ÓĖüÓĖ▓ÓĖŻÓĖüÓĖŻÓĖ░ÓĖłÓĖ▒ÓĖö = 0 ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ćÓĖ¦ ÓĖĪÓĖ▓ÓĖüÓĖŚÓĖĄÓĖ¬ÓĖĖÓĖö Ó╣ł ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ł ÓĖć = 0
- 6. ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł Ó╣ł ( Simple hamonic motion )
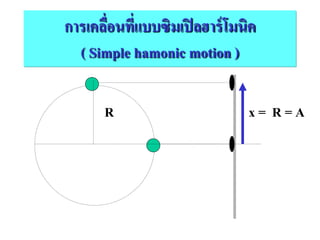
- 7. ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł Ó╣ł ( Simple hamonic motion ) A ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö A ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö
- 8. ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł Ó╣ł ( Simple hamonic motion ) R Rsin x = R sin
- 9. ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł Ó╣ł ( Simple hamonic motion ) R x= R=A
- 10. X = R sin’ü▒ X = A sin’ü▒ R=A X = A sin’üĘt ’üĘ= ’ü▒ X t A t A
- 11. ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣ćÓĖ¦ÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖ v v cos vŌĆÖ = vcos
- 12. v┬┤ = v cos ’ü▒ v┬┤ = ’üĘA cos ’ü▒ v = ’üĘR R =A v┬┤ = ’üĘA cos ’üĘt ’üĘ= ’ü▒ t v vmax t Vmax = ’üĘA ÓĖŚÓĖĄÓ╣łÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖ¬ÓĖĪÓĖöÓĖĖÓĖź
- 13. ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣ł ÓĖćÓĖéÓĖŁÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖ ac ’ü▒ ac sin ’ü▒ ac sin ’ü▒ ’ü▒ ac
- 14. aŌĆÖ = ac sin’ü▒ 2 ac = v R v = ’üĘR R =A aŌĆÖ = ’üĘAsin’ü▒ aŌĆÖ = ’üĘ2Asin ’üĘt ’üĘ= ’ü▒ t aŌĆÖ aŌĆÖmax t aŌĆÖmax = ’üĘ2A ÓĖŚÓĖĄÓ╣łÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖøÓĖźÓĖ▓ÓĖóÓĖ¬ÓĖĖ ÓĖö
- 15. ÓĖ¬ÓĖŻÓĖĖÓĖøÓĖ¬ÓĖĪÓĖüÓĖ▓ÓĖŻÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŗÓĖ┤ÓĖĪÓ╣ĆÓĖøÓĖ┤ ÓĖźÓĖ«ÓĖ▓ÓĖŻÓ╣ī Ó╣éÓĖĪÓĖÖÓĖ┤ÓĖä Ó╣ł x = Asin’üĘt v = ’üĘAcos ’üĘ t a = - ’üĘ 2Asin ’üĘ t= - ’üĘ 2x
- 16. ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö ( A ) ÓĖŁÓĖ▒ÓĖĪÓĖøÓĖźÓĖ┤ÓĖłÓĖ╣ÓĖö ( A ) ÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖøÓĖźÓĖ▓ÓĖóÓĖ¬ÓĖĖ ÓĖö ÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖøÓĖźÓĖ▓ÓĖóÓĖ¬ÓĖĖ ÓĖö ÓĖüÓĖ▓ÓĖŻÓĖüÓĖŻÓĖ░ÓĖłÓĖ▒ÓĖöÓĖĪÓĖ▓ÓĖüÓĖ¬ÓĖĖ ÓĖö ( x ) = A ÓĖĢÓĖ▓Ó╣üÓĖ½ÓĖÖÓ╣ł ÓĖćÓĖ¬ÓĖĪÓĖöÓĖĖÓĖź ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ćÓĖ¦ (v) = 0 ÓĖüÓĖ▓ÓĖŻÓĖüÓĖŻÓĖ░ÓĖłÓĖ▒ÓĖö = 0 ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ł ÓĖć ( a ) = ’üĘ2A ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ćÓĖ¦ ÓĖĪÓĖ▓ÓĖüÓĖŚÓĖĄÓĖ¬ÓĖĖÓĖö Ó╣ł Vmax = ’üĘA ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓Ó╣ĆÓĖŻÓ╣ł ÓĖć = 0
- 17. ÓĖüÓĖ▓ÓĖŻÓ╣üÓĖüÓĖ¦Ó╣ł ÓĖćÓĖéÓĖŁÓĖćÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓĖÖÓĖ▓ÓĖ¼ÓĖ┤ ÓĖüÓĖ▓ (Simple pendulum)
- 18. ÓĖüÓĖ▓ÓĖŻÓ╣üÓĖüÓĖ¦Ó╣ł ÓĖćÓĖéÓĖŁÓĖćÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓĖÖÓĖ▓ÓĖ¼ÓĖ┤ ÓĖüÓĖ▓ (Simple pendulum)
- 19. ÓĖüÓĖ▓ÓĖŻÓ╣üÓĖüÓĖ¦Ó╣ł ÓĖćÓĖéÓĖŁÓĖćÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓĖÖÓĖ▓ÓĖ¼ÓĖ┤ ÓĖüÓĖ▓ (Simple pendulum) x = xmax = A x = xmax = A v=0 v=0 a = amax a = amax A A x = 0 v = vmax a = 0
- 20. ÓĖüÓĖ▓ÓĖŻÓ╣üÓĖüÓĖ¦Ó╣ł ÓĖćÓĖéÓĖŁÓĖćÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓĖÖÓĖ▓ÓĖ¼ÓĖ┤ ÓĖüÓĖ▓ (Simple pendulum) F = ma tan = x l - mg sin = ma x sin = tan = l a = -g x l l a = - ’üĘ2 x wsin w cos W
- 21. x a= - g l a= - ’üĘ2x -’üĘ2x = -g x l ’üĘ2 = g l x ’üĘ = l
- 22. x ’üĘ = l 2’ü░ ’üĘ= T ’üĘ = 2’ü░ f T = 2’ü░ l g f = 1 g 2’ü░ l
- 23. ÓĖĢÓĖó. ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣ł ÓĖćÓ╣ĆÓĖÖÓĖĘÓ╣łÓĖŁÓĖćÓĖłÓĖ▓ÓĖüÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣éÓĖÖÓ╣ē ÓĖĪÓĖ¢Ó╣ł ÓĖ¦ÓĖćÓĖéÓĖŁÓĖćÓ╣éÓĖźÓĖüÓĖĪÓĖĄ ÓĖäÓ╣ł ÓĖ▓ÓĖøÓĖŻÓĖ░ÓĖĪÓĖ▓ÓĖō 9.78 m /s ÓĖłÓĖćÓĖ½ÓĖ▓ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖóÓĖ▓ÓĖ¦ÓĖéÓĖŁÓĖćÓĖüÓ╣ē ÓĖ▓ÓĖÖ ÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓĖÖÓĖ▓ÓĖ¼ÓĖ┤ ÓĖüÓĖ▓ÓĖŚÓĖĄÓ╣łÓ╣üÓĖüÓĖ¦Ó╣ł ÓĖćÓ╣äÓĖöÓ╣ē 60 ÓĖŻÓĖŁÓĖÜ Ó╣āÓĖÖ 1 ÓĖÖÓĖ▓ÓĖŚÓĖĄ f = 1 g 2’ü░ l 1 = 1 9.78 2 x 22 ll = 0.25 7 ÓĖöÓĖ▒ÓĖćÓĖÖÓĖ▒Ó╣ēÓĖÖ ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖóÓĖ▓ÓĖ¦ÓĖüÓ╣ē ÓĖ▓ÓĖÖÓĖźÓĖ╣ÓĖüÓĖĢÓĖĖÓ╣ēÓĖĪÓ╣ĆÓĖŚÓ╣ł ÓĖ▓ÓĖüÓĖ▒ÓĖÜ 0.25 Ó╣ĆÓĖĪÓĖĢÓĖŻ ÓĖ½ÓĖŻÓĖĘÓĖŁ 25 Ó╣ĆÓĖŗÓĖÖÓĖĢÓĖ┤Ó╣ĆÓĖĪÓĖĢÓĖŻ ÓĖĢÓĖŁÓĖÜ