



![źĘź╣źŲźÓųŲė∙żŪżõżĻż┐żżż│ż╚
╚ļ┴”éÄż“▓┘ū„żĘżŲ│÷┴”ż“─┐ś╦éÄż╦Į³ż┼ż▒żļ
[└²ż©żą] ╠©▄ćż╬─┐ś╦ū∙ś╦żžż╬ęŲäė
x
źŌ®`ź┐żžą┼║┼u(t)ż“╚ļ┴”
r(t)
x(t)
Ų½▓Ņe(t)
╚ļ┴”Ż║źŌ®`ź┐żžż╬╚ļ┴”ļŖłRu(t)
│÷┴”Ż║╠©▄ć╬╗ų├x(t)](https://image.slidesharecdn.com/controlbydeeplearning-180619101239/85/Control-by-deep-learning-6-320.jpg)















































![[šō╬─┬įšh]Stochastic Thermodynamics Interpretation of Information Geometry](https://cdn.slidesharecdn.com/ss_thumbnails/aa-180330124241-thumbnail.jpg?width=560&fit=bounds)

More Related Content
More from KCS Keio Computer Society (20)
Control by deep learning
- 2. ūį╝║ĮBĮķ Ī± ├¹Ū░Ż║▒▒┤Õ┐ĪÅį Ī± SD 3─Ļ Ī± źĒź▄ź├ź╚╝╝ąg蹊┐╗ß Ī± KCS AI░Ó Ī± ųŲė∙╣żč¦Īó┤_┬╩źĒź▄źŲźŻź»ź╣ ?├ŃÅŖųążŪżóżĻĪóź╣źķźżź╔żŽķg▀`żżż“║¼żÓż½żŌżĘżņż╩żż
- 3. ż│ż╬ź╣źķźżź╔żŪü╗ż©żļż│ż╚ Ī± ╩┬Ū░ų¬ūRŻ©ųŲė∙ż├żŲ║╬Ż┐Ż® Ī± č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļ Ī± źŪźŻ®`źūż╩覎░ųŲė∙ż╦ż─żżżŲŻ©┬█╬─╔▄ĮķŻ®
- 4. ż│ż╬ź╣źķźżź╔żŪü╗ż©żļż│ż╚ Ī± ╩┬Ū░ų¬ūRŻ©ųŲė∙ż├żŲ║╬Ż┐Ż® Ī± č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļ Ī± źŪźŻ®`źūż╩覎░ųŲė∙ż╦ż─żżżŲŻ©┬█╬─╔▄ĮķŻ®
- 7. ╩ųĘ©ż╬żęż╚ż─Ż║╣┼ĄõųŲė∙ Ī± ╚ļ┴”ż╦īØż╣żļ│÷┴”ż╬ż▀ż╦ū┼─┐ Ī± ═ĻĶĄżŪżŽ¤ożżż¼ĪóżżżżĖążĖż╬│÷┴”ż¼Ą├żķżņżļ Ī± įOėŗż¼║åģg ó┌ųŲė∙Ų„ż“įOėŗż╣żļ ó┘Ų½▓Ņż“ź╝źĒż╦żĘż┐ żż ü╗▀_ķv╩²
- 9. ųŲė∙╩ųĘ©Ż©PIDųŲė∙Ż® Ų½▓Ņż╬▒╚└²Ż©PŻ®Īó╬óĘųŻ©D)ĪóĘeĘųŻ©IŻ®ż╦ ╗∙ż┼żżżŲ╚ļ┴”éÄż“ēõż©żļųŲė∙╩ųĘ© Ī± PųŲė∙Ż║┤¾żŁż»ż╣żļż╚š±äėż¼Ųż│żļ Ī± IųŲė∙Ż║Č©│ŻŲ½▓Ņż“ąĪżĄż»ż╣żļ Ī± Č┘ųŲė∙Ż║š±Č»ŽųŽ¾ż“ęųż©żļ
- 11. ¼F┤·ųŲė∙żžĪŁ Ī± ╚ļ│÷┴”ż└ż▒żŪż╩ż»Īóū┤æB┐šķgż“ÆQż” Ī± ČÓ╚ļ│÷┴”ż“ÆQż©żļ Ī± ╩▒ēõźĘź╣źŲźÓĪóĘŪŽ▀ą╬źĘź╣źŲźÓżŌÆQż©żļ
- 13. ż│ż╬ź╣źķźżź╔żŪü╗ż©żļż│ż╚ Ī± ╩┬Ū░ų¬ūRŻ©ųŲė∙ż├żŲ║╬Ż┐Ż® Ī± č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļ Ī± źŪźŻ®`źūż╩覎░ųŲė∙ż╦ż─żżżŲŻ©┬█╬─╔▄ĮķŻ®
- 18. å¢Ņ}ĄŃ Ī± īg┐šķg╔ŽżŪč¦┴Ģż╣żļł÷║Ž Ī·Ę┤Å═╗ž╩²ż“╔┘ż╩ż»Ż”įćąą╗ž╩²ż“Č╠ż»ż╣żļ▒žę¬ Ī± ╬óĘųż╣żļż╬żŪĪóėQ£yļj궿╦╚§żż Ī± └RżĻĘĄż╣ż╚ųŲė∙īØŽ¾żŽēõż’ż├żŲżĘż▐ż”
- 19. ż│ż╬ź╣źķźżź╔żŪü╗ż©żļż│ż╚ Ī± ╩┬Ū░ų¬ūRŻ©ųŲė∙ż├żŲ║╬Ż┐Ż® Ī± č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļ Ī± źŪźŻ®`źūż╩ųŲė∙ż╦ż─żżżŲŻ©┬█╬─╔▄ĮķŻ®
- 21. Modeling of nonlinear system based on deep learning framework(2016) Ī± ĘŪŠĆą╬ż╩źĘź╣źŲźÓż“DeepLearningżŪźŌźŪźļ╗»żĘż┐ Ī± ENN(Elman Neural Network)żŪĘŪŠĆą╬ż╩źĘź╣źŲźÓż╬ memory effectżŌč¦┴ĢżĘżŲżżżļ Ī± RBM(Restricted Boltzman Machine)żŪ│§Ų┌éÄż“╩┬Ū░č¦┴Ģ Ī·Šų╦∙ĮŌż“▒▄ż▒Īóč¦┴Ģż“Ė▀╦┘╗» Ī± ENNż╚RBMż“ĮMż▀║Žż’ż╗ż┐DRM(Deep Reconstruction Model)żŪč¦┴Ģż“ąąż”
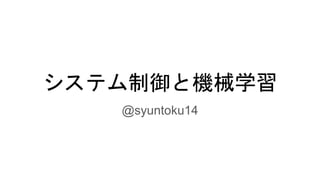
- 24. PIDųŲė∙Ų„ż╬NNżŪż╬ų├żŁōQż© Ī± On replacing PID controller with ANN controller for DC motor position control (2013) Ī± On Replacing PID Controller with Deep Learning Controller for DC Motor System(2015)(Deepż╦żĘż┐żõż─Ż® PIDųŲė∙Ų„ż╬▓┐Ęųż“ź╦źÕ®`źķźļź═ź├ź╚żŪų├żŁōQż©
- 25. On replacing PID controller with ANN controller for DC motor position control (2013) Ī± PIDź│ź¾ź╚źĒ®`źķż“NNżŪų├żŁōQż©żļż│ż╚ż¼│÷└┤ż┐ Ī± Į╠ĤżóżĻč¦┴ĢżŪĪó╬┤ų¬ż╬źĘź╣źŲźÓż╦īØżĘżŲżŌPIDżĶżĻżŌ┴╝ż»īØÅĻżŪżŁżļŻ©żķ żĘżżŻ® ─┐ś╦éÄ ż│żņż“0ż╦ żĘż┐żż ųŲė∙īØŽ¾
- 27. On Replacing PID Controller with Deep Learning Controller for DC Motor System(2015) PIDź│ź¾ź╚źĒ®`źķż╬│÷┴”ż“Į╠ĤźŪ®`ź┐ż╚żĘżŲč¦┴Ģ Ī·DeepLearningControllerż╬ż▀żŪųŲė∙Ż©źŲź╣ź╚ĢrŻ® č¦┴ĢĢr źŲź╣ź╚Ģr
- 29. ż▐ż╚żß Ī± č¦┴Ģż╦żĶżļźŌźŪźļźšźĻ®`ż╩ųŲė∙ Ī± ź│ź¾ź╚źĒ®`źķż╚żĘżŲż╬DeepLearningż╬┐╔─▄ąį Ī± ĘŪŽ▀ą╬źŌźŪźļż“Č┘▒▒▒Ķ│ó▒▓╣░∙▓įŠ▒▓į▓ĄżŪ覎░
- 30. ▓╬┐╝ Ī± On replacing PID controller with ANN controller for DC motor position control (http://consortiacademia.org/wp-content/uploads/IJRSC/IJRSC_v2i1/236- 1374-1-PB.pdf) Ī± On Replacing PID Controller with Deep Learning Controller for DC Motor System Ż©http://www.joace.org/uploadfile/2015/0408/20150408032023512.pdfŻ® Ī± Modeling of nonlinear system based on deep learning framework(http://link.springer.com/10.1007/s11071-015-2571-6)
Editor's Notes
- #4: ü╗ż©ż┐żżż│ż╚Ż║ ?č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļż¼┤µį┌ż╣żļ ?źŪźŻ®`źūźķ®`ź╦ź¾ź░ż“╩╣ż├ż┐╩ųĘ©ż¼żóżļ ?źßźĻź├ź╚ż╚źŪźßźĻź├ź╚ ż╬╚²ĄŃż¼ü╗ż’żņżążĮżņżŪżĶżż
- #5: ČÓĘų░õ│¦ż╬Ž╚ąąż¼ČÓżżż╚╦╝ż”ż╬żŪĪóūŅ│§ż╦ųŲė∙╣żč¦ż╦ż─żżżŲšh├„żĘżĶż”ż╚╦╝żżż▐ż╣
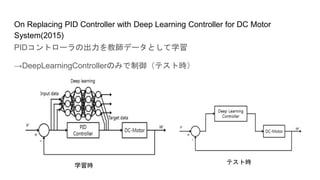
- #7: ╠©│Ąż╬╬╗ų├│µż╚─┐▒ĻŻ“ż¼ėļż©żķżņż┐╩▒ż╦Īó╠©│Ąż╬źŌ®`ź┐żžż╬╚ļ┴”ż“▓┘ū„żĘżŲĪóŲ½▓Ņ▒ż“ąĪżĄż»żĘż┐żż
- #8: ╚ļ┴”ż½żķ│÷┴”ż╦ų┴żļż▐żŪż╬ķv╩²ż“įOėŗż╣żļ╩ųĘ©Ż©ųŲė∙īØŽ¾żŽźųźķź├ź»ź▄ź├ź»ź╣żŪ┴╝żżŻ® ų┴żļż▐żŪż╬▀^│╠ż“ķv╩²ż╚żĘżŲ┐╝ż©ĪóųŲė∙Ų„Ż©ź│ź¾ź╚źĒ®`źķŻ®ż╦żĶż├żŲķv╩²ż“ųŲė∙żĘĪóė¹żĘżż│÷┴”ż“Ą├żļĪŻ ╚ļ┴”ż╬ų▄▓©╩²ÅĻ┤ż¼║åģgż╦ż’ż½żļ
- #9: żóż╚żŪ│÷żŲż»żļż╬żŪčį╝░żĘż▐żĘż┐ įÆżĘż¼ķLż»ż╩ż├żŲżĘż▐ż”ż╬żŪ║åØŹż╦żżż”Ż©Pż╚Iż╚Dż╦ż─żżżŲ╩÷ż┘żļŻ® Ų½▓Ņż“Č©╩²▒ȿʿ┐żŌż╬ĪóĢrķgĘeĘųżĘż┐żŌż╬Īó╬óĘųżĘż┐żŌż╬ż“╝ėż©żļ
- #11: Ž▀ą╬╩▒▓╗ēõŽĄĪó└²ż©żąźŌ®`ź┐ż╬ĄńłRż“Č■▒Čż╦ż╣żļż╚ź╚źļź»ż¼Č■▒Čż╦ż╩ż├ż┐żĻŻ©ģŚ├▄ż╦żŽ╬źż”ż¼Ż®
- #12: ╚ļ┴”ż╦īØż╣żļ│÷┴”ż╬ż▀ż“ęŖżļż╬ż¼╣┼ĄõųŲė∙ ¼F┤·ųŲė∙żŽ╚ļ│÷┴”ż└ż▒żŪż╩ż»ū┤æB┐šķgżŌÆQż”Ī·ż│żņż╦żĶż├żŲĪóĘŪŠĆą╬ŽĄż“Ļ¢ż╦ÆQż”ż│ż╚ż¼żŪżŁżļ └²ż©żąĪó╠©▄ćż╬źŌ®`ź┐ż╬¤ßżõ╦┘Č╚ż╩ż╔ĪóųŲė∙īØŽ¾ż╬ū┤æBż“├„╩ŠĄ─ż╦ėø╩÷ż╣żļ╩ųĘ©
- #13: ę╗░Ńż╦ĪóĘŪŽ▀ą╬ż“ÆQż”│Ī║ŽżŽĪóźĘź╣źŲźÓż╬ėĶ▓ŌżõŽ▀ą╬╗»Īóģg┤┐╗»ż“ąąż”│Ī║Žż¼ČÓż»ĪóżĮżņżŽŠ½Č╚│÷ż╩żżżĶż═
- #14: ü╗ż©ż┐żżż│ż╚Ż║ ?č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļż¼┤µį┌ż╣żļ ?źŪźŻ®`źūźķ®`ź╦ź¾ź░ż“╩╣ż├ż┐╩ųĘ©ż¼żóżļ ?źßźĻź├ź╚ż╚źŪźßźĻź├ź╚ ż╬╚²ĄŃż¼ü╗ż’żņżążĮżņżŪżĶżż
- #15: └²ż©żąźĒź▄ź├ź╚ż╩ż╔ĪóĖ┤ļjż½ż─źŌźŪźļ╗»żŌ─čżĘżż│Ī║Žż¼ż│żņż╦Ė├Ą▒ż╣żļ
- #16: ╚╦ķgżŽīØŽ¾ż¼ż’ż½ż├żŲż╩ż»żŲżŌĪó║╬╗žż½└RżĻĘĄż╗żąż└żżż┐żżųŲė∙żŪżŁżļ ┬Ü╚╦żŽė¢ŠÜż“Ęeż¾żŪż╣żĄż▐żĖżżŠ½Č╚ż“│÷ż╣Ż©┤¾╠Õż¬ż¾ż╩żĖż│ż╚Ż®
- #17: ūŅżŌ╗∙▒ŠĄ─ż╩żõż─ ųŲė∙īØŽ¾ż¼ēõ╗»żĘż╩żżŻ©źŌ®`ź┐ż╩ż╔ż¼¤oŽ▐Ģrķg╝┌āPżĘżŲżŌēõ╗»żĘż╩żżŻ®
- #18: Ųš═©ż╬PIDųŲė∙ż╚║╬ż¼▀`ż”ż½Ż┐ ųŲė∙ż“ūŅ│§ż½żķūŅßßż▐żŪ└RżĻĘĄż╣Ż©Į±ż▐żŪĮBĮķżĘż┐żõż─żŪżŽĪó║╬╗ž└RżĻĘĄżĮż”ż¼═¼żĖŻ® Į±ż▐żŪż╬żõż─żŽĪót+1ż“Ė³ą┬żĘżŲżżż┐ż╬ż╦īØżĘĪóč¦┴ĢųŲė∙żŪżŽk+1ż“Ė³ą┬ż╣żļ ż│żņĪóżĶż»ęŖż┐żķźšźŻ®`ź╔źąź├ź»żĘżŲżżż╩żżż│ż╚ż╦Ü▌ż┼ż»ż╚╦╝ż”ĪŻźšźŻ®`ź╔źąź├ź»żĘżŲżżżļżĶż”ż╦ęŖż©żŲĪóīgżŽĖ³ą┬żĘżŲżżżļż╬żŽ┤╬╗žż╬╚ļ┴”żŪżóżļĪŻ ż│żņżŽDą═č¦┴Ģż╚żżż”żŌż╬ ż╩ż╝╬óĘųŻ┐Ī·│÷┴”ż“╬óĘųż╣żļż╚╚ļ┴”ż╬┤╬╩²ż╚ę╗ų┬ż╣żļł÷║ŽżŽĪó╬óĘųż╣żļ Ż©└²ż©żąźĒź▄ź├ź╚ż╬ł÷║ŽĪó│÷┴”ż“ę╗╗ž╬óĘųż╣żļż╚ķgĮėż╬ĮŪ╦┘Č╚ĪóżŌż”ę╗╗ž╬óĘųż╣żļż╚ź╚źļź»ż¼Ļ¢ż╦│÷żŲż»żļĪ·╚ļ┴”ż╚═¼żĖŻ® ż─ż▐żĻĪó│÷┴”ż╬┤╬╩²ż╬Č■╗ž╬óĘųż¼╚ļ┴”ż╚ę╗ų┬ż╣żļł÷║ŽżŽĪóČ■╗ž╬óĘųż╦ż╣żļż┘żŁ ż╩ż╝Ż┐Ī·żĮż”ż╣żļż╚Īóįćąąż¼└RżĻĘĄż╣ż│ż╚żŪ═¹ż▀ż╬│÷┴”ż¼▀_│╔żĄżņżļŻ©Č©╩²ąą┴ą”Żż¼▀mŪąż╩ż╚żŁŻ®
- #19: źĘź▀źÕźņ®`źĘźńź¾╔ŽżŪpretrainingż╣żļ╩ųĘ©żŽ┤µį┌żĘżĮż” ╬óĘųż╣żļ▓┐ĘųĪóż─ż▐żĻż│żņżŽźšźŻ®`ź╔źąź├ź»▓┐Ęųż¼╚ļ┴”éÄż“┐╝æ]żĘżŲż¬żķż║Īóż┐ż└Ų½▓Ņż╬╬óĘųż“╝ėż©żļż└ż▒Ī·ź╬źżź║ż╦żĶżļ┤¾żŁż╩╬óĘųéÄż¼╝ėż©żķżņżŲżĘż▐ż”┐╔─▄ąį
- #20: ü╗ż©ż┐żżż│ż╚Ż║ ?č¦┴ĢųŲė∙ż╚żżż”źĖźŃź¾źļż¼┤µį┌ż╣żļ ?źŪźŻ®`źūźķ®`ź╦ź¾ź░ż“╩╣ż├ż┐╩ųĘ©ż¼żóżļ ?źßźĻź├ź╚ż╚źŪźßźĻź├ź╚ ż╬╚²ĄŃż¼ü╗ż’żņżążĮżņżŪżĶżż
- #21: ż▐ż║╔▄Įķż╣żļż╬żŽĪó
- #22: memory effect: └²ż©żążĘżĘż¬ż╔żĘż▀ż┐żżż╩Īó│÷┴”ż¼▀^╚źż╬╚ļ┴”ż╦ę└┤µż╣żļżŌż╬ Į±ż▐żŪż╬źóźūźĒ®`ź┴żŪżŽĪó│§Ų┌éÄż“▀mŪąż╦øQżßż╩żżż╚Šų╦∙ĮŌż╦Ļłżļ RBMĪ·AutoEncoderż╬Ū░╔ĒŻ┐╚ļ┴”éÄż½żķŪ▒į┌ēõ╩²ż“żęż═żĻ│÷ż╣ ENNĪ·▓┐ĘųĄ─ż╦RNNż¼╩╣ż’żņżŲżļŻ┐
- #23: ų▄▓©╩²ÅĻ┤ż“ż╔żņż»żķżżč¦┴ĢżŪżŁżŲżżżļż½Ż┐ īgżŽĪóį¬šō╬─ż“ęŖżļż╚RBMżŌENNżŌ╩«Ęųč¦┴ĢżŪżŁżŲżżżļÜ▌ż¼ż╣żļż¾ż└żĶż═ żóż╚ĪóRBMżŪč¦┴ĢżŪżŁżļż╬ż¼żĶż»ż’ż½żķż╩ż½ż├ż┐ĪŻ
- #24: żĄż├żŁšh├„żĘż┐Īó└RżĻĘĄżĘč¦┴ĢÖCż╬č¦┴Ģėø▓┐Ęųż“DeepLearningżŪų├żŁōQż©żŲżĘż▐ż¬ż”ż├żŲżżż”įÆ źŌźŪźļż¼ż’ż½ż├żŲż╩ż»żŲżŌżżżżżĘĪóųŲė∙żŌä┘╩ųż╦č¦┴ĢżĘżŲż»żņżļż╬żŪÜ°ė├ąįż¼Ė▀żż
- #25: ż│ż╬šō╬─šiż¾ż└ż▒ż╔ĪóźŌźŪźļż╬šh├„ż¼Ū│ż½ż├ż┐żĻĪóļLżņīėż¼Č■īėż└ż├ż┐żĻĪóżóż¾ż▐żĻ▓╬┐╝ż╦żŽż╩żķż╩żżż½żŌ PIDż“DeepLearningżŪų├żŁōQż©żŲżŌż╩ż¾ż½ż”ż▐ż»ąąż»żĶż├żŲįÆ
- #26: żķżĘżżż├żŲżżż”ż╬ż¼Īóż╩ż¾ż╚ż│ż│żŪźŪ®`ź┐ż¼▌dż├żŲżżż╩ż½ż├ż┐ż╬żŪ šō╬─żŪīgļHż╦ÆQż├żŲżżżļż╬ż¼ģg╝āż╩źŌźŪźļż╦īØżĘżŲż╬żõż─ż╬ż▀ż└ż├ż┐... źßź┴źŃźßź┴źŃ║åģgż╦īgū░żŪżŁżĮż” ż│ż│żŪż’ż½ż¾ż╩ż½ż├ż┐ż╬ż¼ĪóNN Plant Modelż╬┤µį┌ęŌ┴x
- #27: ż┴żŃż¾ż╚▒╩▒§Č┘ųŲė∙Ų„ż“覎░żŪżŁżŲżżżļż╚żżż”ĄŃżŪĪóČ┘▒▒▒Ķ│ó▒▓╣░∙▓įŠ▒▓į▓Ąż¼ųŲė∙Ų„ż╚żĘżŲ┐╔─▄ąįż¼żóżļż├żŲżżż”ż│ż╚ż¼Ęųż½ż├ż┐ĪŻ
- #28: żĄż├żŁż╚ż╬▀`żżżŽĪ󿥿├żŁżŽreferenceż“č¦┴ĢżĘżŲżżż┐ż╬ż╦īØżĘĪóĮ±╗žżŽPIDź│ź¾ź╚źĒ®`źķż“č¦┴ĢżĘżŲżżżļ źŲź╣ź╚Ģrż╬ą╬żŪč¦┴Ģż“ąąż├żŲżżż╩żżż╬żŽ║╬╣╩ż½Ż┐ Ī·żĮżŌżĮżŌ─┐Ą─ż¼═Ļ╚½ż╩PIDųŲė∙Ų„ż╬─ŻéŹż└ż├ż┐ż½żķŻ┐ ą┬żĘż»ųŲė∙Ų„ż“ū„żļż│ż╚ż¼─┐Ą─żŪżŽż╩ż½ż├ż┐Ż┐ ż│żņż╩ż¾żŪż╣ż¼ĪóDeepLearning▓┐Ęųż╦DeepBeriefNetworkż├żŲżżż”ż╬ż“╩╣ż├żŲżżżļ Ī·pre-trainingż╚fine-tuningż╬Č■ż─ż╦Ęųż▒żķżņżļżŌż╬Ż┐ pre-trainingżŽųŲŽ▐ĖČżŁź▄źļź─ź▐ź¾ź▐źĘź¾żŪąąż”Ż©ż╩ż╦ż│żņŻ┐Ż®
- #29: ż│żņż═ĪóżĮżņżŽżĮż”ż├żŲżżż”ĖążĖż╣żļż¾żŪż╣ż¼ĪŻĪŻĪŻ Ž╚ąąčąŠ┐ż╚żĘżŲČ■īėż╬żŌż╬ż¼PIDęį═ŌżŌč¦┴ĢżŪżŁżŲżżżļż╬żŪĪóDeepLearningżŪż”ż▐ż»ąąż½ż╩żżż’ż▒¤ożżż╚╦╝ż├ż┐ż¾żŪż╣ż¼Īóż╔ż”żŪż╣ż½Ż┐
- #30: īØŽ¾ż¼ż’ż½żķż╩ż»żŲżŌĪóč¦┴Ģż╣żļż│ż╚żŪųŲė∙ż“īg¼FżŪżŁżļ DeepLearningż“ź│ź¾ź╚źĒ®`źķĪóźŌźŪźļż╦▀mė├żĘż┐╩┬└²ż¼żóżļ