Controlling Anisotropy In Mass-Spring Systems
ŌĆóDownload as PPT, PDFŌĆó
0 likesŌĆó709 views

This presents a deformable model that offers control of the isotropy or anisotropy of elastic material, independently of the way the object is tiled into volume elements. The new model is as easy to implement and almost as efficient as mass-spring systems, from which it is derived. In addition to controlled anisotropy, it contrasts with those systems in its ability to model constant volume deformations. We illustrate the new model by animating objects tiled with tetrahedral and hexahedral meshes.


![Mass-Spring Systems Previous solutions homogeneity Voronoi regions [Deussen et al., 1995] isotropy/anisotropy parameter identification: simulated annealing, genetic algorithm [Deussen et al., 1995; Louchet et al., 1995] hand-made mesh [Miller, 1988; Ng and Fiume, 1997] Voronoi regions v 3 v 2 v 1](https://image.slidesharecdn.com/controlling-anisotropy-in-mass-spring-systems-091213144351-phpapp01/85/Controlling-Anisotropy-In-Mass-Spring-Systems-4-320.jpg)
![Mass-Spring Systems No volume preservation correction methods [Lee et al., 1995; Promayon et al., 1996]](https://image.slidesharecdn.com/controlling-anisotropy-in-mass-spring-systems-091213144351-phpapp01/85/Controlling-Anisotropy-In-Mass-Spring-Systems-5-320.jpg)














Controlling Anisotropy In Mass-Spring Systems
- 1. Controlling Anisotropy in Mass-Spring Systems David Bourguignon and Marie-Paule Cani i MAGIS-GRAVIR
- 2. Motivation Simulating biological materials elastic anisotropic constant volume deformation Efficient model mass-spring systems (widely used) A human liver with the main venous system superimposed
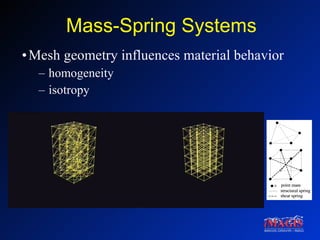
- 3. Mass-Spring Systems Mesh geometry influences material behavior homogeneity isotropy
- 4. Mass-Spring Systems Previous solutions homogeneity Voronoi regions [Deussen et al., 1995] isotropy/anisotropy parameter identification: simulated annealing, genetic algorithm [Deussen et al., 1995; Louchet et al., 1995] hand-made mesh [Miller, 1988; Ng and Fiume, 1997] Voronoi regions v 3 v 2 v 1
- 5. Mass-Spring Systems No volume preservation correction methods [Lee et al., 1995; Promayon et al., 1996]
- 6. New Deformable Model Controlled isotropy/anisotropy uncoupling springs and mesh geometry Volume preservation Easy to code, efficient related to mass-spring systems
- 7. Elastic Volume Element Mechanical characteristics defined along axes of interest Forces resulting from local frame deformation Forces applied to masses (vertices) Intersection points I 1 ŌĆÖ I 1 e 1 e 3 I 3 I 3 ŌĆÖ e 2 I 2 I 2 ŌĆÖ I 1 ŌĆÖ I 1 e 1 A B C ’üĪ ’üó ’ü¦ Barycenter
- 8. Forces Calculations Stretch: Axial damped spring forces (each axis) Shear: Angular spring forces (each pair of axes) f 1 I 1 ŌĆÖ I 1 e 1 f 1 ŌĆÖ f 3 I 1 ŌĆÖ I 1 e 1 e 3 I 3 I 3 ŌĆÖ f 1 f 1 ŌĆÖ f 3 ŌĆÖ
- 9. Animation Algorithm Example taken for a tetrahedral mesh: 4 point masses 3 orthogonal axes of interest 2. Determine local frame deformation 3. Evaluate resulting forces 4. Interpolate to get resulting forces on vertices FŌĆÖ 1 F C = ’ü¦ F 1 + ’ü¦ ŌĆÖ FŌĆÖ 1 + ... F C F 1 I 1 ŌĆÖ I 1 e 1 x I = ’üĪ’ĆĀ x A + ’üó’ĆĀ x B + ’ü¦’ĆĀ x C A B C ’üĪ ’üó ’ü¦ I 1. Interpolate to get intersection points
- 10. Animation Algorithm Interpolation scheme for an hexahedral mesh: 8 point masses 3 orthogonal axes of interest x I = ’ü║’ü©’ĆĀ x A + (1 ŌĆō ’ü║ ) ’ü©’ĆĀ x B + (1 ŌĆō ’ü║ )(1 ŌĆō ’ü© ) x C + ’ü║ (1 ŌĆō ’ü© ) x D ’ü║ ’ü© A B C D I
- 11. Volume preservation Extra radial forces Tetra mesh: preserve sum of the barycenter-vertex distances Hexa mesh: preserve each barycenter-vertex distance Tetrahedral Mesh With volume forces Mass-spring system Without volume forces
- 12. Results Comparison with mass-spring systems: no more undesired anisotropy correct behavior in bending Orthotropic material, same parameters in the 3 directions
- 13. Results Control of anisotropy same tetrahedral mesh different anisotropic behaviors
- 14. Results Horizontal Diagonal Hemicircular
- 15. Results Concentric Helicoidal (top view) Random Concentric Helicoidal
- 16. Results Performance issues: benchmarks on an SGI O2 (MIPS R5000 CPU 300 MHz, 512 Mb main memory)
- 17. Conclusion and Future Work Same mesh, different behaviors but different meshes, not the same behavior ! Soft constraint for volume preservation Combination of different volume element types with different orders of interpolation
- 18. Conclusion and Future Work Extension to active materials human heart motion simulation non-linear springs with time-varying properties Angular maps of the muscle fiber direction in a human heart
- 19. ╠²