CV2015. –¦–Β–Κ―Ü–Η―è 2. –ü―Ä–Ψ―¹―²―΄–Β –Φ–Β―²–Ψ–¥―΄ ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι.

–ö―É―Ä―¹ "–£–≤–Β–¥–Β–Ϋ–Η–Β –≤ –Κ–Ψ–Φ–Ω―¨―é―²–Β―Ä–Ϋ–Ψ–Β –Ζ―Ä–Β–Ϋ–Η–Β", ―΅–Η―²–Α–Β–Φ―΄–Ι –Ϋ–Α –£–€–ö –€–™–Θ –Η–Φ–Β–Ϋ–Η –€.–£. –¦–Ψ–Φ–Ψ–Ϋ–Ψ―¹–Ψ–≤–Α –≤ –≤–Β―¹–Β–Ϋ–Ϋ–Β–Φ ―¹–Β–Φ–Β―¹―²―Ä–Β 2015 –≥–Ψ–¥–Α. –¦–Β–Κ―²–Ψ―Ä - –ö–Ψ–Ϋ―É―à–Η–Ϋ –ê–Ϋ―²–Ψ–Ϋ. –¦–Β–Κ―Ü–Η―è 2. –ü―Ä–Ψ―¹―²―΄–Β –Φ–Β―²–Ψ–¥―΄ ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι. –†–Α―¹―¹–Φ–Α―²―Ä–Η–≤–Α―é―²―¹―è –Φ–Β―²–Ψ–¥―΄ –±–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι, –Ψ―¹–Ϋ–Ψ–≤―΄ –Φ–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Ψ–Ι –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η–Η, –Φ–Β–¥–Η–Α–Ϋ–Ϋ–Α―è ―³–Η–Μ―¨―²―Ä–Α―Ü–Η―è, –≤―΄–¥–Β–Μ–Β–Ϋ–Η–Β ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Φ–Ω–Ψ–Ϋ–Β–Ϋ―², –Φ–Β―²–Ψ–¥ –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–≥–Ψ ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è, –Φ–Β―²–Ψ–¥ –ö-―¹―Ä–Β–¥–Ϋ–Η―Ö, –Ψ―Ü–Β–Ϋ–Κ–Α ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ ―¹–Β–≥–Φ–Β–Ϋ―²–Ψ–≤.


















![οÉΚ
οÉΚ
οÉΚ
οÉΜ
οÉΙ
οÉΣ
οÉΣ
οÉΣ
οÉΪ
οÉ©
111
1]1[1
111
–†–Β–Ζ―É–Μ―¨―²–Α―² –Ψ–Ω–Β―Ä–Α―Ü–Η–Η ―¹―É–Ε–Β–Ϋ–Η―è
οÉΚ
οÉΚ
οÉΚ
οÉΜ
οÉΙ
οÉΣ
οÉΣ
οÉΣ
οÉΪ
οÉ©
010
1]1[1
010
οÉΚ
οÉΚ
οÉΚ
οÉΚ
οÉΚ
οÉΚ
οÉΚ
οÉΚ
οÉΚ
οÉΜ
οÉΙ
οÉΣ
οÉΣ
οÉΣ
οÉΣ
οÉΣ
οÉΣ
οÉΣ
οÉΣ
οÉΣ
οÉΪ
οÉ©
0011100
0111110
1111111
111]1[111
1111111
0111110
0011100](https://image.slidesharecdn.com/cv201502basicanalysis-150323044105-conversion-gate01/85/CV2015-2-25-320.jpg)









![–†–Β–Κ―É―Ä―¹–Η–≤–Ϋ―΄–Ι –Α–Μ–≥–Ψ―Ä–Η―²–Φ
void Labeling(BIT* img[], int* labels[])
{
// labels –¥–Ψ–Μ–Ε–Ϋ–Α –±―΄―²―¨ –Ψ–±–Ϋ―É–Μ–Β–Ϋ–Α
L = 1;
for(y = 0; y < H; y++)
for(x = 0; x < W; x++)
{
Fill(img, labels, x, y, L++);
}
}](https://image.slidesharecdn.com/cv201502basicanalysis-150323044105-conversion-gate01/85/CV2015-2-40-320.jpg)
![–†–Β–Κ―É―Ä―¹–Η–≤–Ϋ―΄–Ι –Α–Μ–≥–Ψ―Ä–Η―²–Φ
void Fill(BIT* img[], int* labels[], int x, int y, int L)
{
if( (labels[x][y] = = 0) && (img[x][y] = = 1) )
{
labels[x][y] = L;
if( x > 0 )
Fill(img, labels, x βÄ™ 1, y, L);
if( x < W - 1 )
Fill(img, labels, x + 1, y, L);
if( y > 0 )
Fill(img, labels, x, y - 1, L);
if( y < H - 1 )
Fill(img, labels, x, y + 1, L);
}
}](https://image.slidesharecdn.com/cv201502basicanalysis-150323044105-conversion-gate01/85/CV2015-2-41-320.jpg)
































































More Related Content
What's hot (20)
Similar to CV2015. –¦–Β–Κ―Ü–Η―è 2. –ü―Ä–Ψ―¹―²―΄–Β –Φ–Β―²–Ψ–¥―΄ ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι. (19)

















More from Anton Konushin (10)










CV2015. –¦–Β–Κ―Ü–Η―è 2. –ü―Ä–Ψ―¹―²―΄–Β –Φ–Β―²–Ψ–¥―΄ ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι.
- 1. –ü―Ä–Ψ―¹―²–Ψ–Ι –Α–Ϋ–Α–Μ–Η–Ζ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι Many slides adapted from Fei-Fei Li, Rob Fergus,Antonio Torralba, Jean Ponce and Svetlana Lazebnik –ê–Ϋ―²–Ψ–Ϋ –ö–Ψ–Ϋ―É―à–Η–Ϋ
- 2. –£―΄–¥–Β–Μ–Β–Ϋ–Η–Β –Ψ–±―ä–Β–Κ―²–Ψ–≤ –½–¥–Α–Ϋ–Η–Β –¦–Η―Ü–Ψ–Δ–Β–Κ―¹―² –¦–Η―Ü–Ψ –Δ–Β–Κ―¹―² –ß–Β–Μ–Ψ–≤–Β–Κ –ß–Β–Μ–Ψ–≤–Β–Κ –ù–Β–Ψ–±―Ö–Ψ–¥–Η–Φ–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ–Η―²―¨, –Β―¹―²―¨ –Μ–Η –Ϋ–Α –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Η –Ψ–±―ä–Β–Κ―²―΄ –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ ―²–Η–Ω–Α –Η –Β―¹–Μ–Η –¥–Α, ―²–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ–Η―²―¨ –Η―Ö –Ω–Ψ–Μ–Ψ–Ε–Β–Ϋ–Η–Β
- 3. –‰–Ζ–Φ–Β–Ϋ―΅–Η–≤–Ψ―¹―²―¨ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι –£–Ϋ–Β―à–Ϋ–Η–Β ―³–Α–Κ―²–Ψ―Ä―΄: βÄΔ –ü–Ψ–Μ–Ψ–Ε–Β–Ϋ–Η–Β –Κ–Α–Φ–Β―Ä―΄ βÄΔ –£–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η–Β ―¹–≤–Ψ–Ι―¹―²–≤–Α –Κ–Α–Φ–Β―Ä―΄ βÄΔ –û―¹–≤–Β―â–Β–Ϋ–Η–Β –£–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η–Β ―³–Α–Κ―²–Ψ―Ä―΄: βÄΔ –î–Β―³–Ψ―Ä–Φ–Α―Ü–Η–Η –Ψ–±―ä–Β–Κ―²–Ψ–≤ βÄΔ –£–Ϋ―É―²―Ä–Η–Κ–Μ–Α―¹―¹–Ψ–≤–Α―è –Η–Ζ–Φ–Β–Ϋ―΅–Η–≤–Ψ―¹―²―¨ βÄΔ –ü–Ψ–Κ–Α –Ω―Ä–Η―Ö–Ψ–¥–Η―²―¹―è –Ζ–Α–¥–Α―΅―É ―É–Ω―Ä–Ψ―â–Α―²―¨, –≤–≤–Ψ–¥―è –Ψ–≥―Ä–Α–Ϋ–Η―΅–Β–Ϋ–Η―è –Ϋ–Α ―Ä–Α–Κ―É―Ä―¹ ―¹―ä―ë–Φ–Κ–Η, ―É―¹–Μ–Ψ–≤–Η―è –Ψ―¹–≤–Β―â–Β–Ϋ–Η―è, ―²–Η–Ω―΄ –Ψ–±―ä–Β–Κ―²–Ψ–≤ βÄΔ –€―΄ –±―É–¥–Β–Φ ―Ä–Α―¹―¹–Φ–Α―²―Ä–Η–≤–Α―²―¨ –Ω―Ä–Ψ―¹―²―΄–Β ―¹–Μ―É―΅–Α–Η, –Κ–Ψ–≥–¥–Α –≤―¹–Β ―³–Α–Κ―²–Ψ―Ä―΄ –≤–Α―Ä―¨–Η―Ä―É―é―²―¹―è –Ϋ–Β–Ζ–Ϋ–Α―΅–Η―²–Β–Μ―¨–Ϋ–Ψ
- 4. –ü―Ä–Η–Φ–Β―Ä―΄ –Ω―Ä–Ψ―¹―²―΄―Ö –Ζ–Α–¥–Α―΅ –ö–Μ–Β―²–Κ–Η –Κ―Ä–Ψ–≤–Η –€–Ψ–Ϋ–Β―²―΄ –Η –Κ―É–Ω―é―Ä―΄ –¦–Ψ–Ε–Κ–Η –Η ―¹–Α―Ö–Α―Ä –ù–Ψ–Φ–Β―Ä–Α
- 5. –ö–Α–Κ–Η–Β –Ω–Α―Ä–Α–Φ–Β―²―Ä―΄ –Φ–Β–Ϋ―è―é―²―¹―è –Φ–Α–Μ–Ψ? –€–Ψ–Ϋ–Β―²―΄ –Η –Κ―É–Ω―é―Ä―΄ –ù–Ψ–Φ–Β―Ä–Α –£–Ϋ–Β―à–Ϋ–Η–Β ―³–Α–Κ―²–Ψ―Ä―΄: βÄΔ –ü–Ψ–Μ–Ψ–Ε–Β–Ϋ–Η–Β –Κ–Α–Φ–Β―Ä―΄ βÄΔ –£–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η–Β ―¹–≤–Ψ–Ι―¹―²–≤–Α –Κ–Α–Φ–Β―Ä―΄ βÄΔ –û―¹–≤–Β―â–Β–Ϋ–Η–Β –£–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Η–Β ―³–Α–Κ―²–Ψ―Ä―΄: βÄΔ –î–Β―³–Ψ―Ä–Φ–Α―Ü–Η–Η –Ψ–±―ä–Β–Κ―²–Ψ–≤ βÄΔ –£–Ϋ―É―²―Ä–Η–Κ–Μ–Α―¹―¹–Ψ–≤–Α―è –Η–Ζ–Φ–Β–Ϋ―΅–Η–≤–Ψ―¹―²―¨ –î–Α –≤―¹–Β!
- 6. –‰–Ζ ―΅–Β–≥–Ψ ―¹–Ψ―¹―²–Ψ–Η―² –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β?
- 7. –‰–Ζ ¬Ϊ–Κ―É―¹–Κ–Ψ–≤¬Μ - –Ψ―²–¥–Β–Μ―¨–Ϋ―΄―Ö –Ψ–±―ä–Β–Κ―²–Ψ–≤
- 8. –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è βÄΔ –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è - ―ç―²–Ψ ―¹–Ω–Ψ―¹–Ψ–± ―Ä–Α–Ζ–¥–Β–Μ–Β–Ϋ–Η―è ―¹―Ü–Β–Ϋ―΄ –Ϋ–Α ¬Ϊ–Κ―É―¹–Κ–Η¬Μ, ―¹ –Κ–Ψ―²–Ψ―Ä―΄–Φ–Η –Ω―Ä–Ψ―â–Β ―Ä–Α–±–Ψ―²–Α―²―¨ βÄΔ –Δ–Β―¹―¹–Β–Μ―è―Ü–Η―è - ―Ä–Α–Ζ–±–Η–Β–Ϋ–Η–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –Ϋ–Α –Ϋ–Β–Ω–Β―Ä–Β–Κ―Ä―΄–≤–Α―é―â–Η–Β―¹―è –Ψ–±–Μ–Α―¹―²–Η, –Ω–Ψ–Κ―Ä―΄–≤–Α―é―â–Η–Β –≤―¹–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β –Η –Ψ–¥–Ϋ–Ψ―Ä–Ψ–¥–Ϋ―΄–Β –Ω–Ψ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Φ –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Α–Φ βÄΔ –€–Ψ–Ε–Ϋ–Ψ –Η –Ω–Ψ –¥―Ä―É–≥–Ψ–Φ―É ―¹–Β–≥–Φ–Β–Ϋ―²–Η―Ä–Ψ–≤–Α―²―¨ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β βÄΔ –ü–Β―Ä–Β―¹–Β–Κ–Α―é―â–Η–Β―¹―è –Ψ–±–Μ–Α―¹―²–Η βÄΔ –‰–Β―Ä–Α―Ä―Ö–Η―΅–Β―¹–Κ–Ψ–Β –Ω―Ä–Β–¥―¹―²–Α–≤–Μ–Β–Ϋ–Η–Β
- 9. –Δ―Ä–Β–±–Ψ–≤–Α–Ϋ–Η―è –Κ ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η βÄΔ –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è - ―ç―²–Ψ ―¹–Ω–Ψ―¹–Ψ–± ―Ä–Α–Ζ–¥–Β–Μ–Β–Ϋ–Η―è ―¹―Ü–Β–Ϋ―΄ –Ϋ–Α ¬Ϊ–Κ―É―¹–Κ–Η¬Μ, ―¹ –Κ–Ψ―²–Ψ―Ä―΄–Φ–Η –Ω―Ä–Ψ―â–Β ―Ä–Α–±–Ψ―²–Α―²―¨ βÄΔ –™―Ä–Α–Ϋ–Η―Ü―΄ ―¹–Β–≥–Φ–Β–Ϋ―²–Ψ–≤ –¥–Ψ–Μ–Ε–Ϋ―΄ ―¹–Ψ–Ψ―²–≤–Β―²―¹―²–≤–Ψ–≤–Α―²―¨ –≥―Ä–Α–Ϋ–Η―Ü–Α–Φ –Ψ–±―ä–Β–Κ―²–Ψ–≤
- 10. –†–Β–Ζ―É–Μ―¨―²–Α―² ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η βÄΔ –ö–Α–Κ –Φ―΄ –±―É–¥–Β–Φ –Ζ–Α–Ω–Η―¹―΄–≤–Α―²―¨ ―Ä–Β–Ζ―É–Μ―¨―²–Α―² ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η? βÄΔ –Γ–¥–Β–Μ–Α–Β–Φ –Κ–Α―Ä―²―É ―Ä–Α–Ζ–Φ–Β―²–Κ–Η βÄ™ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β, –≤ –Κ–Α–Ε–¥–Ψ–Φ –Ω–Η–Κ―¹–Β–Μ–Β –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –Ϋ–Ψ–Φ–Β―Ä ―¹–Β–≥–Φ–Β–Ϋ―²–Α, –Κ–Ψ―²–Ψ―Ä–Ψ–Φ―É –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―² ―ç―²–Ψ―² –Ω–Η–Κ―¹–Β–Μ―¨ βÄΔ –£–Η–Ζ―É–Α–Μ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ ―É–¥–Ψ–±–Ϋ–Ψ –Κ–Α–Ε–¥―΄–Ι ―¹–Β–≥–Φ–Β–Ϋ―² ―¹–≤–Ψ–Η–Φ ―Ü–≤–Β―²–Ψ–Φ
- 11. –ê–Μ–≥–Ψ―Ä–Η―²–Φ―΄ –Κ ―Ä–Α―¹―¹–Φ–Ψ―²―Ä–Β–Ϋ–Η―é βÄΔ –ë–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è –Η –≤―΄–¥–Β–Μ–Β–Ϋ–Η―è ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Φ–Ω–Ψ–Ϋ–Β–Ϋ―² βÄΔ –ü–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–Β ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β βÄΔ –€–Β―²–Ψ–¥ K-―¹―Ä–Β–¥–Ϋ–Η―Ö
- 12. –ê–Μ–≥–Ψ―Ä–Η―²–Φ―΄ –Κ ―Ä–Α―¹―¹–Φ–Ψ―²―Ä–Β–Ϋ–Η―é βÄΔ –ë–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è –Η –≤―΄–¥–Β–Μ–Β–Ϋ–Η―è ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Φ–Ω–Ψ–Ϋ–Β–Ϋ―² βÄΔ –ü–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–Β ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β βÄΔ –€–Β―²–Ψ–¥ K-―¹―Ä–Β–¥–Ϋ–Η―Ö
- 13. –ü―Ä–Ψ―¹―²–Β–Ι―à–Α―è ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è βÄΔ –£―¹–Β –Ψ–±―ä–Β–Κ―²―΄ ―è―Ä–Κ–Η–Β, ―³–Ψ–Ϋ ―²―ë–Φ–Ϋ―΄–Ι βÄΔ –û–±―ä–Β–Κ―²―΄ ¬Ϊ–Κ–Ψ–Ϋ―²―Ä–Α―¹―²–Ϋ―΄¬Μ –Ω–Ψ –Ψ―²–Ϋ–Ψ―à–Β–Ϋ–Η―é –Κ –Ω―Ä–Ψ―¹―²–Ψ–Φ―É (–Ψ–¥–Ϋ–Ψ―²–Ψ–Ϋ–Ϋ–Ψ–Φ―É) ―³–Ψ–Ϋ―É βÄΔ –î–Μ―è ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η ―²–Α–Κ–Ψ–≥–Ψ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –Ϋ–Α–Φ –¥–Ψ―¹―²–Α―²–Ψ―΅–Ϋ–Ψ: βÄΔ –Ω–Ψ―Ä–Ψ–≥–Ψ–≤–Α―è –±–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è βÄΔ –Ψ–±―Ä–Α–±–Ψ―²–Κ–Η ―à―É–Φ–Α βÄΔ –≤―΄–¥–Β–Μ–Β–Ϋ–Η―è ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Φ–Ω–Ψ–Ϋ–Β–Ϋ―² –ß–Β–Φ –Ψ―²–Μ–Η―΅–Α―é―²―¹―è –Ψ–±―ä–Β–Κ―²―΄ –Ϋ–Α ―ç―²–Ψ–Φ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Η?
- 14. –ü–Ψ―Ä–Ψ–≥–Ψ–≤–Α―è –±–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è ο¹° –ü–Ψ―Ä–Ψ–≥–Ψ–≤–Α―è ―³–Η–Μ―¨―²―Ä–Α―Ü–Η―è (thresholding) ο¹° –ü–Η–Κ―¹–Β–Μ–Η, –Κ–Ψ―²–Ψ―Ä―΄―Ö –≤―΄―à–Β/–Ϋ–Η–Ε–Β –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –Ω–Ψ―Ä–Ψ–≥–Α, –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–≥–Ψ ¬Ϊ–Η–Ζ–≤–Ϋ–Β¬Μ, –Ω–Ψ–Φ–Β―΅–Α―é―²―¹―è 1 ο¹° –ù–Η–Ε–Β –Ω–Ψ―Ä–Ψ–≥–Α –Ω–Ψ–Φ–Β―΅–Α―é―²―¹―è 0 ο¹° –ë–Η–Ϋ–Α―Ä–Ϋ–Ψ–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β βÄ™ –Ω–Η–Κ―¹–Β–Μ–Η –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –Φ–Ψ–≥―É―² –Ω―Ä–Η–Ϋ–Η–Φ–Α―²―¨ ―²–Ψ–Μ―¨–Κ–Ψ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η―è 0 –Η 1 ο¹° –ë–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è - –Ω–Ψ―¹―²―Ä–Ψ–Β–Ϋ–Η–Β –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–≥–Ψ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –Ω–Ψ –Ω–Ψ–Μ―É―²–Ψ–Ϋ–Ψ–≤–Ψ–Φ―É / ―Ü–≤–Β―²–Ϋ–Ψ–Φ―É
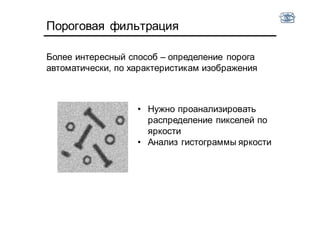
- 15. –ü–Ψ―Ä–Ψ–≥–Ψ–≤–Α―è ―³–Η–Μ―¨―²―Ä–Α―Ü–Η―è –ë–Ψ–Μ–Β–Β –Η–Ϋ―²–Β―Ä–Β―¹–Ϋ―΄–Ι ―¹–Ω–Ψ―¹–Ψ–± βÄ™ –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β –Ω–Ψ―Ä–Ψ–≥–Α –Α–≤―²–Ψ–Φ–Α―²–Η―΅–Β―¹–Κ–Η, –Ω–Ψ ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ–Α–Φ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è βÄΔ –ù―É–Ε–Ϋ–Ψ –Ω―Ä–Ψ–Α–Ϋ–Α–Μ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β –Ω–Η–Κ―¹–Β–Μ–Β–Ι –Ω–Ψ ―è―Ä–Κ–Ψ―¹―²–Η βÄΔ –ê–Ϋ–Α–Μ–Η–Ζ –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―΄ ―è―Ä–Κ–Ψ―¹―²–Η
- 16. –™–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ–Α ―è―Ä–Κ–Ψ―¹―²–Η –™–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ–Α βÄ™ ―ç―²–Ψ –≥―Ä–Α―³–Η–Κ ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η―è ―è―Ä–Κ–Ψ―¹―²–Β–Ι –Ϋ–Α –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Η. –ù–Α –≥–Ψ―Ä–Η–Ζ–Ψ–Ϋ―²–Α–Μ―¨–Ϋ–Ψ–Ι –Ψ―¹–Η - ―à–Κ–Α–Μ–Α ―è―Ä–Κ–Ψ―¹―²–Β–Ι ―²–Ψ–Ϋ–Ψ–≤ –Ψ―² –±–Β–Μ–Ψ–≥–Ψ –¥–Ψ ―΅–Β―Ä–Ϋ–Ψ–≥–Ψ, –Ϋ–Α –≤–Β―Ä―²–Η–Κ–Α–Μ―¨–Ϋ–Ψ–Ι –Ψ―¹–Η - ―΅–Η―¹–Μ–Ψ –Ω–Η–Κ―¹–Β–Μ–Β–Ι –Ζ–Α–¥–Α–Ϋ–Ϋ–Ψ–Ι ―è―Ä–Κ–Ψ―¹―²–Η. 0 255 0 255
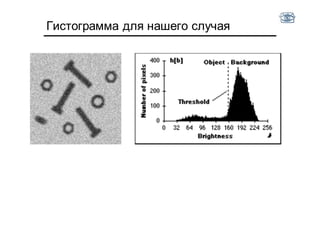
- 17. –™–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ–Α –¥–Μ―è –Ϋ–Α―à–Β–≥–Ψ ―¹–Μ―É―΅–Α―è
- 18. –ê–Ϋ–Α–Μ–Η–Ζ –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―΄ ο¹° –ê–Ϋ–Α–Μ–Η–Ζ ―¹–Η–Φ–Φ–Β―²―Ä–Η―΅–Ϋ–Ψ–≥–Ψ –Ω–Η–Κ–Α –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―΄ ο¹° –ü―Ä–Η–Φ–Β–Ϋ―è–Β―²―¹―è –Κ–Ψ–≥–¥–Α ―³–Ψ–Ϋ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –¥–Α–Β―² –Ψ―²―΅–Β―²–Μ–Η–≤―΄–Ι –Η –¥–Ψ–Φ–Η–Ϋ–Η―Ä―É―é―â–Η–Ι –Ω–Η–Κ –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―΄, ―¹–Η–Φ–Φ–Β―²―Ä–Η―΅–Ϋ―΄–Ι –Ψ―²–Ϋ–Ψ―¹–Η―²–Β–Μ―¨–Ϋ–Ψ ―¹–≤–Ψ–Β–≥–Ψ ―Ü–Β–Ϋ―²―Ä–Α. 1. –Γ–≥–Μ–Α–¥–Η―²―¨ –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―É; 2. –ù–Α–Ι―²–Η ―è―΅–Β–Ι–Κ―É –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―΄ hmax ―¹ –Φ–Α–Κ―¹–Η–Φ–Α–Μ―¨–Ϋ―΄–Φ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Β–Φ; 3. –ù–Α ―¹―²–Ψ―Ä–Ψ–Ϋ–Β –≥–Η―¹―²–Ψ–≥―Ä–Α–Φ–Φ―΄ –Ϋ–Β –Ψ―²–Ϋ–Ψ―¹―è―â–Β–Ι―¹―è –Κ –Ψ–±―ä–Β–Κ―²―É (–Ϋ–Α –Ω―Ä–Η–Φ–Β―Ä–Β βÄ™ ―¹–Ω―Ä–Α–≤–Α –Ψ―² –Ω–Η–Κ–Α ―³–Ψ–Ϋ–Α) –Ϋ–Α–Ι―²–Η ―è―Ä–Κ–Ψ―¹―²―¨ hp, –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ –Ω–Η–Κ―¹–Β–Μ–Β–Ι ―¹ ―è―Ä–Κ–Ψ―¹―²―¨―é >= hp ―Ä–Α–≤–Ϋ―è–Β―²―¹―è p% (–Ϋ–Α–Ω―Ä–Η–Φ–Β―Ä 5%) –Ψ―² –Ω–Η–Κ―¹–Β–Μ–Β–Ι ―è―Ä–Κ–Ψ―¹―²–Η –Κ–Ψ―²–Ψ―Ä―΄―Ö >= hmax; 4. –ü–Β―Ä–Β―¹―΅–Η―²–Α―²―¨ –Ω–Ψ―Ä–Ψ–≥ T = hmax - (hp - hmax);
- 19. –®―É–Φ –≤ –±–Η–Ϋ–Α―Ä–Ϋ―΄―Ö –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è―Ö –ü―Ä–Η–Φ–Β―Ä –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–≥–Ψ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―é ―¹ ―¹–Η–Μ―¨–Ϋ―΄–Φ ―à―É–Φ–Ψ–Φ –ß–Α―¹―²–Ψ –≤–Ψ–Ζ–Ϋ–Η–Κ–Α–Β―² –Η–Ζ-–Ζ–Α –Ϋ–Β–≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ–Ψ―¹―²–Η –Ω–Ψ–Μ–Ϋ–Ψ―¹―²―¨―é –Ω–Ψ–¥–Α–≤–Η―²―¨ ―à―É–Φ –≤ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è―Ö, –Ϋ–Β–¥–Ψ―¹―²–Α―²–Ψ―΅–Ϋ–Ψ–Ι –Κ–Ψ–Ϋ―²―Ä–Α―¹―²–Ϋ–Ψ―¹―²–Η –Ψ–±―ä–Β–Κ―²–Ψ–≤ –Η ―².–¥.
- 20. –®―É–Φ –≤ –±–Η–Ϋ–Α―Ä–Ϋ―΄―Ö –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è―Ö ο²ï –ü–Ψ –Ψ–¥–Ϋ–Ψ–Φ―É –Ω–Η–Κ―¹–Β–Μ―é –Ϋ–Β–≤–Ψ–Ζ–Φ–Ψ–Ε–Ϋ–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ–Η―²―¨ βÄ™ ―à―É–Φ –Η–Μ–Η –Ψ–±―ä–Β–Κ―²? ο²ï –ù―É–Ε–Ϋ–Ψ ―Ä–Α―¹―¹–Φ–Α―²―Ä–Η–≤–Α―²―¨ –Ψ–Κ―Ä–Β―¹―²–Ϋ–Ψ―¹―²―¨ –Ω–Η–Κ―¹–Β–Μ―è!
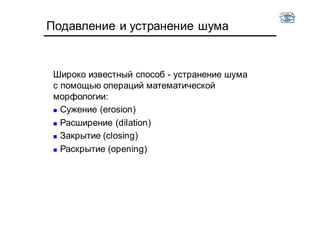
- 21. –ü–Ψ–¥–Α–≤–Μ–Β–Ϋ–Η–Β –Η ―É―¹―²―Ä–Α–Ϋ–Β–Ϋ–Η–Β ―à―É–Φ–Α –®–Η―Ä–Ψ–Κ–Ψ –Η–Ζ–≤–Β―¹―²–Ϋ―΄–Ι ―¹–Ω–Ψ―¹–Ψ–± - ―É―¹―²―Ä–Α–Ϋ–Β–Ϋ–Η–Β ―à―É–Φ–Α ―¹ –Ω–Ψ–Φ–Ψ―â―¨―é –Ψ–Ω–Β―Ä–Α―Ü–Η–Ι –Φ–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Ψ–Ι –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η–Η: ο¹° –Γ―É–Ε–Β–Ϋ–Η–Β (erosion) ο¹° –†–Α―¹―à–Η―Ä–Β–Ϋ–Η–Β (dilation) ο¹° –½–Α–Κ―Ä―΄―²–Η–Β (closing) ο¹° –†–Α―¹–Κ―Ä―΄―²–Η–Β (opening)
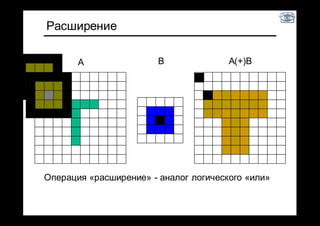
- 22. –€–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Α―è –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η―è A B βÄΔ –€–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ A –Ψ–±―΄―΅–Ϋ–Ψ ―è–≤–Μ―è–Β―²―¹―è –Ψ–±―ä–Β–Κ―²–Ψ–Φ –Ψ–±―Ä–Α–±–Ψ―²–Κ–Η βÄΔ –€–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ B (–Ϋ–Α–Ζ―΄–≤–Α–Β–Φ–Ψ–Β ―¹―²―Ä―É–Κ―²―É―Ä–Ϋ―΄–Φ ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–Φ) βÄ™ –Η–Ϋ―¹―²―Ä―É–Φ–Β–Ϋ―² –Ψ–±―Ä–Α–±–Ψ―²–Κ–Η
- 23. –†–Α―¹―à–Η―Ä–Β–Ϋ–Η–Β A B A(+)B –û–Ω–Β―Ä–Α―Ü–Η―è ¬Ϊ―Ä–Α―¹―à–Η―Ä–Β–Ϋ–Η–Β¬Μ - –Α–Ϋ–Α–Μ–Ψ–≥ –Μ–Ψ–≥–Η―΅–Β―¹–Κ–Ψ–≥–Ψ ¬Ϊ–Η–Μ–Η¬Μ
- 24. –Γ―É–Ε–Β–Ϋ–Η–Β A B A(-)B –û–Ω–Β―Ä–Α―Ü–Η―è ¬Ϊ―Ä–Α―¹―à–Η―Ä–Β–Ϋ–Η–Β¬Μ - –Α–Ϋ–Α–Μ–Ψ–≥ –Μ–Ψ–≥–Η―΅–Β―¹–Κ–Ψ–≥–Ψ ¬Ϊ–Η¬Μ
- 26. –£–Α–Ε–Ϋ–Ψ–Β –Ζ–Α–Φ–Β―΅–Α–Ϋ–Η–Β –†–Β–Ζ―É–Μ―¨―²–Α―² –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η―΅–Β―¹–Κ–Η―Ö –Ψ–Ω–Β―Ä–Α―Ü–Η–Ι –≤–Ψ –Φ–Ϋ–Ψ–≥–Ψ–Φ –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―²―¹―è –Ω―Ä–Η–Φ–Β–Ϋ―è–Β–Φ―΄–Φ ―¹―²―Ä―É–Κ―²―É―Ä–Ϋ―΄–Φ ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–Φ. –£―΄–±–Η―Ä–Α―è ―Ä–Α–Ζ–Μ–Η―΅–Ϋ―΄–Ι ―¹―²―Ä―É–Κ―²―É―Ä–Ϋ―΄–Ι ―ç–Μ–Β–Φ–Β–Ϋ―² –Φ–Ψ–Ε–Ϋ–Ψ ―Ä–Β―à–Α―²―¨ ―Ä–Α–Ζ–Ϋ―΄–Β –Ζ–Α–¥–Α―΅–Η –Ψ–±―Ä–Α–±–Ψ―²–Κ–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι: βÄΔ –®―É–Φ–Ψ–Ω–Ψ–¥–Α–≤–Μ–Β–Ϋ–Η–Β βÄΔ –£―΄–¥–Β–Μ–Β–Ϋ–Η–Β –≥―Ä–Α–Ϋ–Η―Ü –Ψ–±―ä–Β–Κ―²–Α βÄΔ –£―΄–¥–Β–Μ–Β–Ϋ–Η–Β ―¹–Κ–Β–Μ–Β―²–Α –Ψ–±―ä–Β–Κ―²–Α βÄΔ –£―΄–¥–Β–Μ–Β–Ϋ–Η–Β ―¹–Μ–Ψ–Φ–Α–Ϋ–Ϋ―΄―Ö –Ζ―É–±―¨–Β–≤ –Ϋ–Α –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Η ―à–Β―¹―²–Β―Ä–Ϋ–Η
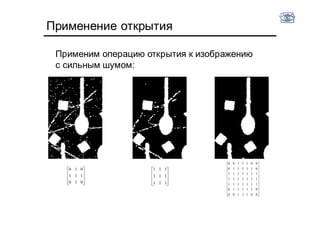
- 27. –û–Ω–Β―Ä–Α―Ü–Η–Η ―Ä–Α―¹–Κ―Ä―΄―²–Η―è –Η –Ζ–Α–Κ―Ä―΄―²–Η―è –€–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η―΅–Β―¹–Κ–Ψ–Β ―Ä–Α―¹–Κ―Ä―΄―²–Η–Β (opening) βÄΔ open(A, B) = (A (-) B) (+) B –€–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η―΅–Β―¹–Κ–Ψ–Β –Ζ–Α–Κ―Ä―΄―²–Η–Β (closing) βÄΔ close(A, B) = (A (+) B) (-) B –ü–Ψ–Ω―Ä–Ψ–±―É–Ι―²–Β –¥–Ψ–≥–Α–¥–Α―²―¨―¹―è, ―΅―²–Ψ ―ç―²–Η –Ψ–Ω–Β―Ä–Α―Ü–Η–Η –¥–Β–Μ–Α―é―²?
- 28. οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 111 111 111 –ü―Ä–Η–Φ–Β–Ϋ–Β–Ϋ–Η–Β –Ψ―²–Κ―Ä―΄―²–Η―è οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 010 111 010 οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 0011100 0111110 1111111 1111111 1111111 0111110 0011100 –ü―Ä–Η–Φ–Β–Ϋ–Η–Φ –Ψ–Ω–Β―Ä–Α―Ü–Η―é –Ψ―²–Κ―Ä―΄―²–Η―è –Κ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―é ―¹ ―¹–Η–Μ―¨–Ϋ―΄–Φ ―à―É–Φ–Ψ–Φ:
- 29. –Γ―É–Ε–Β–Ϋ–Η–Β vs –û―²–Κ―Ä―΄―²–Η–Β –Γ―É–Ε–Β–Ϋ–Η–Β –û―²–Κ―Ä―΄―²–Η–Β
- 30. –î–Β―³–Β–Κ―²―΄ –±–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η–Η –ü―Ä–Η–Φ–Β―Ä –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–≥–Ψ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―é ―¹ –¥–Β―³–Β–Κ―²–Α–Φ–Η ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Β–Φ―΄―Ö –Ψ–±―ä–Β–Κ―²–Ψ–≤
- 31. οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 111 111 111 –ü―Ä–Η–Φ–Β–Ϋ–Β–Ϋ–Η–Β –Ζ–Α–Κ―Ä―΄―²–Η―è οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 0011100 0111110 1111111 1111111 1111111 0111110 0011100 οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 01110 11111 11111 11111 01110 –ü―Ä–Η–Φ–Β–Ϋ–Η–Φ –Ψ–Ω–Β―Ä–Α―Ü–Η―é –Ζ–Α–Κ―Ä―΄―²–Η―è –Κ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―é ―¹ –¥–Β―³–Β–Κ–Η–Α–Φ–Η –Ψ–±―ä–Β–Κ―²–Ψ–≤:
- 32. –ù–Β –Μ―É―΅―à–Η–Ι –Ω―Ä–Η–Φ–Β―Ä –¥–Μ―è –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η–Η –ù–Β –≤–Ψ –≤―¹–Β―Ö ―¹–Μ―É―΅–Α―è―Ö –Φ–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Α―è –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η―è ―²–Α–Κ –Μ–Β–≥–Κ–Ψ ―É–±–Η―Ä–Α–Β―² –¥–Β―³–Β–Κ―²―΄, –Κ–Α–Κ ―Ö–Ψ―²–Β–Μ–Ψ―¹―¨ –±―΄βÄΠ
- 33. οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 111 111 111 –ü―Ä–Η–Φ–Β–Ϋ–Β–Ϋ–Η―è –Ψ–Ω–Β―Ä–Α―Ü–Η–Η –Ψ―²–Κ―Ä―΄―²–Η―è οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 010 111 010 οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 0011100 0111110 1111111 1111111 1111111 0111110 0011100 –ß–Α―¹―²–Ψ –Ω–Ψ–Φ–Ψ–≥–Α–Β―² –Φ–Β–¥–Η–Α–Ϋ–Ϋ–Α―è ―³–Η–Μ―¨―²―Ä–Α―Ü–Η―è!
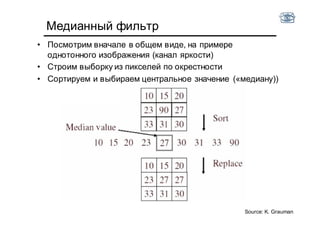
- 34. –€–Β–¥–Η–Α–Ϋ–Ϋ―΄–Ι ―³–Η–Μ―¨―²―Ä βÄΔ –ü–Ψ―¹–Φ–Ψ―²―Ä–Η–Φ –≤–Ϋ–Α―΅–Α–Μ–Β –≤ –Ψ–±―â–Β–Φ –≤–Η–¥–Β, –Ϋ–Α –Ω―Ä–Η–Φ–Β―Ä–Β –Ψ–¥–Ϋ–Ψ―²–Ψ–Ϋ–Ϋ–Ψ–≥–Ψ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è (–Κ–Α–Ϋ–Α–Μ ―è―Ä–Κ–Ψ―¹―²–Η) βÄΔ –Γ―²―Ä–Ψ–Η–Φ –≤―΄–±–Ψ―Ä–Κ―É –Η–Ζ –Ω–Η–Κ―¹–Β–Μ–Β–Ι –Ω–Ψ –Ψ–Κ―Ä–Β―¹―²–Ϋ–Ψ―¹―²–Η βÄΔ –Γ–Ψ―Ä―²–Η―Ä―É–Β–Φ –Η –≤―΄–±–Η―Ä–Α–Β–Φ ―Ü–Β–Ϋ―²―Ä–Α–Μ―¨–Ϋ–Ψ–Β –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Β (¬Ϊ–Φ–Β–¥–Η–Α–Ϋ―É)) Source: K. Grauman
- 35. –î–Μ―è –±–Η–Ϋ–Α―Ä–Ϋ―΄―Ö –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι βÄΔ –£―΄–±–Η―Ä–Α–Β–Φ ―²–Ψ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Β, –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –≤ –Ψ–Κ―Ä–Β―¹―²–Ϋ–Ψ―¹―²–Η –±–Ψ–Μ―¨―à–Β βÄΔ –™―Ä–Α–Ϋ–Η―Ü―΄ –Ψ–±–Μ–Α―¹―²–Β–Ι –Ψ–±―΄―΅–Ϋ–Ψ –Ψ―¹―²–Α―é―²―¹―è –Ϋ–Α –Φ–Β―¹―²–Β βÄΔ –Δ–Ψ–Ϋ–Κ–Η–Β (–Ω–Ψ ―¹―Ä–Α–≤–Ϋ–Β–Ϋ–Η―é ―¹ ―Ä–Α–Ζ–Φ–Β―Ä–Ψ–Φ ―³–Η–Μ―¨―²―Ä–Α¬Μ –Μ–Η–Ϋ–Η–Η –Η―¹―΅–Β–Ζ–Ϋ―É―² βÄΔ –ï―â―ë –Ω―Ä–Ψ –Φ–Β–¥–Η–Α–Ϋ–Ϋ―΄–Ι ―³–Η–Μ―¨―²―Ä –Φ―΄ –≤―¹–Ω–Ψ–Φ–Ϋ–Η–Φ –Ϋ–Α ―¹–Μ–Β–¥―É―é―â–Β–Ι –Μ–Β–Κ―Ü–Η–Η οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 111 101 111 οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 001 110 000 οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 111 111 000 οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 110 110 110 οÉΚ οÉΚ οÉΚ οÉΜ οÉΙ οÉΣ οÉΣ οÉΣ οÉΪ οÉ© 010 010 010
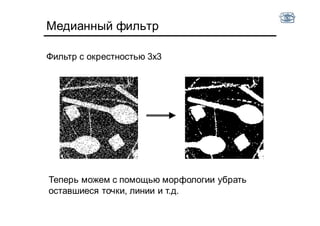
- 36. –€–Β–¥–Η–Α–Ϋ–Ϋ―΄–Ι ―³–Η–Μ―¨―²―Ä –Λ–Η–Μ―¨―²―Ä ―¹ –Ψ–Κ―Ä–Β―¹―²–Ϋ–Ψ―¹―²―¨―é 3x3 –Δ–Β–Ω–Β―Ä―¨ –Φ–Ψ–Ε–Β–Φ ―¹ –Ω–Ψ–Φ–Ψ―â―¨―é –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η–Η ―É–±―Ä–Α―²―¨ –Ψ―¹―²–Α–≤―à–Η–Β―¹―è ―²–Ψ―΅–Κ–Η, –Μ–Η–Ϋ–Η–Η –Η ―².–¥.
- 37. –ß―²–Ψ –¥–Α–Μ―¨―à–Β? –ü–Ψ–Μ―É―΅–Η–Μ–Η –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β –ù―É–Ε–Ϋ–Α –Κ–Α―Ä―²–Α ―Ä–Α–Ζ–Φ–Β―²–Κ–Η
- 38. –£―΄–¥–Β–Μ–Β–Ϋ–Η–Β ―¹–≤―è–Ζ–Ϋ―΄―Ö –Ψ–±–Μ–Α―¹―²–Β–Ι –û–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β ―¹–≤―è–Ζ–Ϋ–Ψ–Ι –Ψ–±–Μ–Α―¹―²–Η: βÄΔ –€–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ –Ω–Η–Κ―¹–Β–Μ–Β–Ι, ―É –Κ–Α–Ε–¥–Ψ–≥–Ψ –Ω–Η–Κ―¹–Β–Μ―è –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –Β―¹―²―¨ ―Ö–Ψ―²―è –±―΄ –Ψ–¥–Η–Ϋ ―¹–Ψ―¹–Β–¥, –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Α―â–Η–Ι –¥–Α–Ϋ–Ϋ–Ψ–Φ―É –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤―É. βÄΔ (–Η–Μ–Η) –¦―é–±―΄–Β –¥–≤–Α –Ω–Η–Κ―¹–Β–Μ―è –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ ―¹–≤―è–Ζ–Α–Ϋ―΄ –Ω―É―²―ë–Φ, –Ω―Ä–Ψ―Ö–Ψ–¥―è―â–Η–Φ ―²–Ψ–Μ―¨–Κ–Ψ ―΅–Β―Ä–Β–Ζ –Ω–Η–Κ―¹–Β–Μ–Η –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –Γ–Ψ―¹–Β–¥–Η –Ω–Η–Κ―¹–Β–Μ–Β–Ι: 4-―¹–≤―è–Ζ–Ϋ–Ψ―¹―²―¨ 8-―¹–≤―è–Ζ–Ϋ–Ψ―¹―²―¨
- 39. –†–Α–Ζ–Φ–Β―²–Κ–Α ―¹–≤―è–Ζ–Ϋ―΄―Ö –Ψ–±–Μ–Α―¹―²–Β–Ι 1 1 2 2 2 1 1 2 2 2 3 4 4 5 4 4 4 6 6 6 6 6 7 –ë–Η–Ϋ–Α―Ä–Ϋ–Ψ–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β –†–Α–Ζ–Φ–Β―΅–Β–Ϋ–Ϋ–Ψ–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β
- 40. –†–Β–Κ―É―Ä―¹–Η–≤–Ϋ―΄–Ι –Α–Μ–≥–Ψ―Ä–Η―²–Φ void Labeling(BIT* img[], int* labels[]) { // labels –¥–Ψ–Μ–Ε–Ϋ–Α –±―΄―²―¨ –Ψ–±–Ϋ―É–Μ–Β–Ϋ–Α L = 1; for(y = 0; y < H; y++) for(x = 0; x < W; x++) { Fill(img, labels, x, y, L++); } }
- 41. –†–Β–Κ―É―Ä―¹–Η–≤–Ϋ―΄–Ι –Α–Μ–≥–Ψ―Ä–Η―²–Φ void Fill(BIT* img[], int* labels[], int x, int y, int L) { if( (labels[x][y] = = 0) && (img[x][y] = = 1) ) { labels[x][y] = L; if( x > 0 ) Fill(img, labels, x βÄ™ 1, y, L); if( x < W - 1 ) Fill(img, labels, x + 1, y, L); if( y > 0 ) Fill(img, labels, x, y - 1, L); if( y < H - 1 ) Fill(img, labels, x, y + 1, L); } }
- 42. –ü–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–Β ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β –ü–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ, ―¹–Κ–Α–Ϋ–Η―Ä―É–Β–Φ –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β ―¹–≤–Β―Ä―Ö―É –≤–Ϋ–Η–Ζ, ―¹–Μ–Β–≤–Α –Ϋ–Α–Ω―Ä–Α–≤–Ψ: if A = O do nothing else if (not B labeled) and (not C labeled) increment label numbering and label A else if B xor C labeled copy label to A else if B and C labeled if B label = C label copy label to A else copy either B label or C label to A record equivalence of labels –½–Α ―¹–Κ–Ψ–Μ―¨–Κ–Ψ –Ψ–Ω–Β―Ä–Α―Ü–Η–Ι –Φ―΄ ―Ä–Α–Ζ–Φ–Β―²–Η–Φ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β?
- 44. –ê–Μ–≥–Ψ―Ä–Η―²–Φ―΄ –Κ ―Ä–Α―¹―¹–Φ–Ψ―²―Ä–Β–Ϋ–Η―é βÄΔ –ë–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è –Η –≤―΄–¥–Β–Μ–Β–Ϋ–Η―è ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Φ–Ω–Ψ–Ϋ–Β–Ϋ―² βÄΔ –ü–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–Β ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β βÄΔ –€–Β―²–Ψ–¥ K-―¹―Ä–Β–¥–Ϋ–Η―Ö
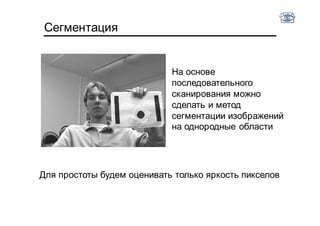
- 45. –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è –ù–Α –Ψ―¹–Ϋ–Ψ–≤–Β –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–≥–Ψ ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è –Φ–Ψ–Ε–Ϋ–Ψ ―¹–¥–Β–Μ–Α―²―¨ –Η –Φ–Β―²–Ψ–¥ ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι –Ϋ–Α –Ψ–¥–Ϋ–Ψ―Ä–Ψ–¥–Ϋ―΄–Β –Ψ–±–Μ–Α―¹―²–Η –î–Μ―è –Ω―Ä–Ψ―¹―²–Ψ―²―΄ –±―É–¥–Β–Φ –Ψ―Ü–Β–Ϋ–Η–≤–Α―²―¨ ―²–Ψ–Μ―¨–Κ–Ψ ―è―Ä–Κ–Ψ―¹―²―¨ –Ω–Η–Κ―¹–Β–Μ–Ψ–≤
- 46. –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è –Φ–Β―²–Ψ–¥–Ψ–Φ –Ω–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–≥–Ψ ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η―è 1. if I(A) βÄ™ Iavg(Cl(B)) > Έ¥ and I(A) βÄ™ Iavg(Cl(C)) > Έ¥ - ―¹–Ψ–Ζ–¥–Α–Β–Φ –Ϋ–Ψ–≤―É―é –Ψ–±–Μ–Α―¹―²―¨, –Ω―Ä–Η―¹–Ψ–Β–¥–Η–Ϋ―è–Β–Φ –Κ –Ϋ–Β–Ι –Ω–Η–Κ―¹–Β–Μ A 2. if I(A) βÄ™ Iavg(Cl(B)) < Έ¥ xor I(A) βÄ™ Iavg(Cl(C)) < Έ¥ βÄ™ –¥–Ψ–±–Α–≤–Η―²―¨ A –Κ –Ψ–¥–Ϋ–Ψ–Ι –Η–Ζ –Ψ–±–Μ–Α―¹―²–Β–Ι 3. if I(A) βÄ™ Iavg(Cl(B)) < Έ¥ and I(A) βÄ™ Iavg(Cl(C)) < Έ¥ : 1. Iavg(Cl(B)) - Iavg(Cl(C)) < Έ¥ βÄ™ ―¹–Μ–Η–≤–Α–Β–Φ –Ψ–±–Μ–Α―¹―²–Η B –Η C. 2. Iavg(Cl(B)) - Iavg(Cl(C)) > Έ¥βÄ™ –¥–Ψ–±–Α–≤–Μ―è–Β–Φ –Ω–Η–Κ―¹–Β–Μ A –Κ ―²–Ψ–Φ―É –Κ–Μ–Α―¹―¹―É, –Ψ―²–Κ–Μ–Ψ–Ϋ–Β–Ϋ–Η–Β –Ψ―² –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ –Φ–Η–Ϋ–Η–Φ–Α–Μ―¨–Ϋ–Ψ. I(A) βÄ™ ―è―Ä–Κ–Ψ―¹―²―¨ –Ω–Η–Κ―¹–Β–Μ–Α A Cl(B) βÄ™ –Ψ–±–Μ–Α―¹―²―¨ –Κ –Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―² –Ω–Η–Κ―¹–Β–Μ B Iav g(Cl(B)) βÄ™ ―¹―Ä–Β–¥–Ϋ―è―è ―è―Ä–Κ–Ψ―¹―²―¨ –Ψ–±–Μ–Α―¹―²–Η –Κ –Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―² B –Γ–Κ–Α–Ϋ–Η―Ä―É–Β–Φ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β ―¹–≤–Β―Ä―Ö―É –≤–Ϋ–Η–Ζ, ―¹–Μ–Β–≤–Α –Ϋ–Α–Ω―Ä–Α–≤–Ψ:
- 48. –ê–Μ–≥–Ψ―Ä–Η―²–Φ―΄ –Κ ―Ä–Α―¹―¹–Φ–Ψ―²―Ä–Β–Ϋ–Η―é βÄΔ –ë–Η–Ϋ–Α―Ä–Η–Ζ–Α―Ü–Η―è –Η –≤―΄–¥–Β–Μ–Β–Ϋ–Η―è ―¹–≤―è–Ζ–Α–Ϋ–Ϋ―΄―Ö –Κ–Ψ–Φ–Ω–Ψ–Ϋ–Β–Ϋ―² βÄΔ –ü–Ψ―¹–Μ–Β–¥–Ψ–≤–Α―²–Β–Μ―¨–Ϋ–Ψ–Β ―¹–Κ–Α–Ϋ–Η―Ä–Ψ–≤–Α–Ϋ–Η–Β βÄΔ –€–Β―²–Ψ–¥ K-―¹―Ä–Β–¥–Ϋ–Η―Ö
- 49. –ö–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η―è –€–Β―²–Ψ–¥ k-―¹―Ä–Β–¥–Ϋ–Η―Ö βÄ™ –Φ–Β―²–Ψ–¥ –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –¥–Α–Ϋ–Ϋ―΄―Ö. –Π–Β–Μ―¨―é –Ζ–Α–¥–Α―΅–Η –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η ―è–≤–Μ―è–Β―²―¹―è ―Ä–Α–Ζ–±–Η–Β–Ϋ–Η–Β –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Α –Ψ–±―ä–Β–Κ―²–Ψ–≤ –Ϋ–Α –≥―Ä―É–Ω–Ω―΄ (–Κ–Μ–Α―¹―²–Β―Ä―΄) –Ϋ–Α –Ψ―¹–Ϋ–Ψ–≤–Β –Ϋ–Β–Κ–Ψ―²–Ψ―Ä–Ψ–Ι –Φ–Β―Ä―΄ ―¹―Ö–Ψ–¥―¹―²–≤–Α –Ψ–±―ä–Β–Κ―²–Ψ–≤. X2 X1
- 50. –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è ―΅–Β―Ä–Β–Ζ –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η―é –ß―²–Ψ –≤ ―¹–Μ―É―΅–Α–Β ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è ¬Ϊ–Ψ–±―ä–Β–Κ―²―΄¬Μ? βÄΔ ¬Ϊ–ü–Η–Κ―¹–Β–Μ–Η¬Μ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è βÄΔ –€―΄ ¬Ϊ–≥―Ä―É–Ω–Ω–Η―Ä―É–Β–Φ¬Μ –Ω–Η–Κ―¹–Β–Μ–Η –Ω–Ψ –Ω–Ψ―Ö–Ψ–Ε–Β―¹―²–Η βÄΔ –ü–Ψ –Κ–Α–Κ–Η–Φ –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Α–Φ –Φ–Ψ–Ε–Β–Φ –Ψ―Ü–Β–Ϋ–Η―²―¨ –Ω–Ψ―Ö–Ψ–Ε–Β―¹―²―¨ –Ω–Η–Κ―¹–Β–Μ–Β–Ι?
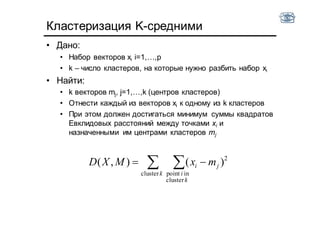
- 51. –ö–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η―è K-c―Ä–Β–¥–Ϋ–Η–Φ–Η βÄΔ –î–Α–Ϋ–Ψ: βÄΔ –ù–Α–±–Ψ―Ä –≤–Β–Κ―²–Ψ―Ä–Ψ–≤ xi i=1,βÄΠ,p βÄΔ k βÄ™ ―΅–Η―¹–Μ–Ψ –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤, –Ϋ–Α –Κ–Ψ―²–Ψ―Ä―΄–Β –Ϋ―É–Ε–Ϋ–Ψ ―Ä–Α–Ζ–±–Η―²―¨ –Ϋ–Α–±–Ψ―Ä xi βÄΔ –ù–Α–Ι―²–Η: βÄΔ k –≤–Β–Κ―²–Ψ―Ä–Ψ–≤ mj, j=1,βÄΠ,k (―Ü–Β–Ϋ―²―Ä–Ψ–≤ –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤) βÄΔ –û―²–Ϋ–Β―¹―²–Η –Κ–Α–Ε–¥―΄–Ι –Η–Ζ –≤–Β–Κ―²–Ψ―Ä–Ψ–≤ xi –Κ –Ψ–¥–Ϋ–Ψ–Φ―É –Η–Ζ k –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤ βÄΔ –ü―Ä–Η ―ç―²–Ψ–Φ –¥–Ψ–Μ–Ε–Β–Ϋ –¥–Ψ―¹―²–Η–≥–Α―²―¨―¹―è –Φ–Η–Ϋ–Η–Φ―É–Φ ―¹―É–Φ–Φ―΄ –Κ–≤–Α–¥―Ä–Α―²–Ψ–≤ –ï–≤–Κ–Μ–Η–¥–Ψ–≤―΄―Ö ―Ä–Α―¹―¹―²–Ψ―è–Ϋ–Η–Ι –Φ–Β–Ε–¥―É ―²–Ψ―΅–Κ–Α–Φ–Η xi –Η –Ϋ–Α–Ζ–Ϋ–Α―΅–Β–Ϋ–Ϋ―΄–Φ–Η –Η–Φ ―Ü–Β–Ϋ―²―Ä–Α–Φ–Η –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤ mj οÉΞ οÉΞ οÄ≠οÄΫ k k i ji mxMXD cluster cluster inpoint 2 )(),(
- 52. –ê–Μ–≥–Ψ―Ä–Η―²–Φ k-―¹―Ä–Β–¥–Ϋ–Η―Ö 1. –Γ–Μ―É―΅–Α–Ι–Ϋ―΄–Φ –Ψ–±―Ä–Α–Ζ–Ψ–Φ –≤―΄–±―Ä–Α―²―¨ k ―¹―Ä–Β–¥–Ϋ–Η―Ö mj j=1,βÄΠ,k 2. –î–Μ―è –Κ–Α–Ε–¥–Ψ–≥–Ψ xi i=1,βÄΠ,p : βÄΔ –Ω–Ψ–¥―¹―΅–Η―²–Α―²―¨ ―Ä–Α―¹―¹―²–Ψ―è–Ϋ–Η–Β –Ψ―² xi –¥–Ψ –Κ–Α–Ε–¥–Ψ–≥–Ψ –Η–Ζ mj j=1,βÄΠ,k βÄΔ –û―²–Ϋ–Β―¹―²–Η (–Ω―Ä–Η–Ω–Η―¹–Α―²―¨) xi –Κ –Κ–Μ–Α―¹―²–Β―Ä―É jβÄô, ―Ä–Α―¹―¹―²–Ψ―è–Ϋ–Η–Β –¥–Ψ ―Ü–Β–Ϋ―²―Ä–Α –Κ–Ψ―²–Ψ―Ä–Ψ–≥–Ψ mjβÄô –Φ–Η–Ϋ–Η–Φ–Α–Μ―¨–Ϋ–Ψ 3. –ü–Β―Ä–Β―¹―΅–Η―²–Α―²―¨ ―¹―Ä–Β–¥–Ϋ–Η–Β mj j=1,βÄΠ,k –Ω–Ψ –≤―¹–Β–Φ –Κ–Μ–Α―¹―²–Β―Ä–Α–Φ 4. –ü–Ψ–≤―²–Ψ―Ä―è―²―¨ ―à–Α–≥–Η 2, 3 –Ω–Ψ–Κ–Α –Κ–Μ–Α―¹―²–Β―Ä―΄ –Ϋ–Β –Ω–Β―Ä–Β―¹―²–Α–Ϋ―É―² –Η–Ζ–Φ–Β–Ϋ―è―²―¨―¹―è
- 53. –ü―Ä–Η–Φ–Β―Ä –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –≤ 2D –‰―¹―Ö–Ψ–¥–Ϋ―΄–Β –¥–Α–Ϋ–Ϋ―΄–Β 8 10 12 14 16 18 20 7 8 9 10 11 12 13 14
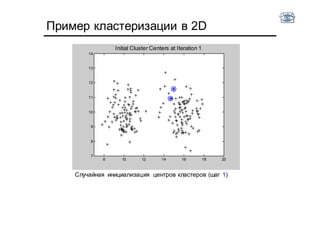
- 54. –ü―Ä–Η–Φ–Β―Ä –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –≤ 2D –Γ–Μ―É―΅–Α–Ι–Ϋ–Α―è –Η–Ϋ–Η―Ü–Η–Α–Μ–Η–Ζ–Α―Ü–Η―è ―Ü–Β–Ϋ―²―Ä–Ψ–≤ –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤ (―à–Α–≥ 1) 8 10 12 14 16 18 20 7 8 9 10 11 12 13 14 Initial Cluster Centers at Iteration 1
- 55. –ü―Ä–Η–Φ–Β―Ä –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –≤ 2D –ö–Μ–Α―¹―²–Β―Ä―΄ –Ω–Ψ―¹–Μ–Β –Ω–Β―Ä–≤–Ψ–Ι –Η―²–Β―Ä–Α―Ü–Η–Η (―à–Α–≥ 2) 8 10 12 14 16 18 20 7 8 9 10 11 12 13 14 Updated Memberships and Boundary at Iteration 1 XVariable YVariable
- 56. –ü―Ä–Η–Φ–Β―Ä –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –≤ 2D –ü–Β―Ä–Β―¹―΅–Β―² ―Ü–Β–Ϋ―²―Ä–Ψ–≤ –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤ –Ω–Ψ―¹–Μ–Β –Ω–Β―Ä–≤–Ψ–Ι –Η―²–Β―Ä–Α―Ü–Η–Η (―à–Α–≥ 3) 8 10 12 14 16 18 20 7 8 9 10 11 12 13 14 Updated Cluster Centers at Iteration 2
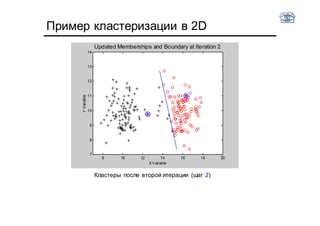
- 57. –ü―Ä–Η–Φ–Β―Ä –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –≤ 2D –ö–Μ–Α―¹―²–Β―Ä―΄ –Ω–Ψ―¹–Μ–Β –≤―²–Ψ―Ä–Ψ–Ι –Η―²–Β―Ä–Α―Ü–Η–Η (―à–Α–≥ 2) 8 10 12 14 16 18 20 7 8 9 10 11 12 13 14 Updated Memberships and Boundary at Iteration 2 XVariable YVariable
- 58. –ü―Ä–Η–Φ–Β―Ä –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η –≤ 2D –Γ―²–Α–±–Η–Μ―¨–Ϋ–Α―è –Κ–Ψ–Ϋ―³–Η–≥―É―Ä–Α―Ü–Η―è –Ω–Ψ―¹–Μ–Β ―΅–Β―²–≤–Β―Ä―²–Ψ–Ι –Η―²–Β―Ä–Α―Ü–Η–Η 8 10 12 14 16 18 20 7 8 9 10 11 12 13 14 Updated Memberships and Boundary at Iteration 4 XVariable YVariable
- 59. –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –Ω–Ψ ―è―Ä–Κ–Ψ―¹―²–Η –†–Α―¹―¹–Φ–Α―²―Ä–Η–≤–Α–Β–Φ –Ψ–¥–Ϋ–Ψ–Φ–Β―Ä–Ϋ–Ψ–Β –Ω―Ä–Ψ―¹―²―Ä–Α–Ϋ―¹―²–≤–Ψ ―è―Ä–Κ–Ψ―¹―²–Β–Ι –Ω–Η–Κ―¹–Β–Μ–Β–Ι –Η –Ω―Ä–Ψ–Η–Ζ–≤–Ψ–¥–Η–Φ –≤ –Ϋ–Β–Φ –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η―é ―¹ –Ω–Ψ–Φ–Ψ―â―¨―é k-―¹―Ä–Β–¥–Ϋ–Η―Ö. –≠―²–Ψ –¥–Α–Β―² –Α–≤―²–Ψ–Φ–Α―²–Η―΅–Β―¹–Κ–Ψ–Β –≤―΄―΅–Η―¹–Μ–Β–Ϋ–Η–Β ―è―Ä–Κ–Ψ―¹―²–Ϋ―΄―Ö –Ω–Ψ―Ä–Ψ–≥–Ψ–≤. (–î–Μ―è –Ω–Ψ–Μ―É―΅–Β–Ϋ–Η―è –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–≥–Ψ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è k=2)
- 60. –ê–Μ–≥–Ψ―Ä–Η―²–Φ –ö-―¹―Ä–Β–¥–Ϋ–Η―Ö. –ü―Ä–Η–Φ–Β―Ä―΄. –‰―¹―Ö–Ψ–¥–Ϋ–Ψ–Β –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β –ö–Μ–Α―¹―²–Β―Ä―΄ –Ω–Ψ ―è―Ä–Κ–Ψ―¹―²–Η –ö–Μ–Α―¹―²–Β―Ä―΄ –Ω–Ψ ―Ü–≤–Β―²―É –£–Β–Κ―²–Ψ―Ä –Ω―Ä–Η–Ζ–Ϋ–Α–Κ βÄ™ {―è―Ä–Κ–Ψ―¹―²―¨} –£–Β–Κ―²–Ψ―Ä –Ω―Ä–Η–Ζ–Ϋ–Α–Κ βÄ™ {R, G, B}
- 61. –ê–Μ–≥–Ψ―Ä–Η―²–Φ –ö-―¹―Ä–Β–¥–Ϋ–Η―Ö βÄΔ –û–¥–Ϋ–Ψ–Ω–Α―Ä–Α–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Ι βÄΔ –Δ―Ä–Β–±―É–Β―² –Ζ–Ϋ–Α–Ϋ–Η―è ―²–Ψ–Μ―¨–Κ–Ψ –Ψ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Β –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤ βÄΔ –†–Α–Ϋ–¥–Ψ–Φ–Η–Ζ–Η―Ä–Ψ–≤–Α–Ϋ βÄΔ –½–Α–≤–Η―¹–Η―² –Ψ―² –Ϋ–Α―΅–Α–Μ―¨–Ϋ–Ψ–≥–Ψ –Ω―Ä–Η–±–Μ–Η–Ε–Β–Ϋ–Η―è βÄΔ –ù–Β ―É―΅–Η―²―΄–≤–Α–Β―² ―¹―²―Ä–Ψ–Β–Ϋ–Η―è ―¹–Α–Φ–Η―Ö –Κ–Μ–Α―¹―²–Β―Ä–Ψ–≤ –ï―¹―²―¨ ―Ü–Β–Μ―΄–Ι ―Ä―è–¥ –¥―Ä―É–≥–Η―Ö, –±–Ψ–Μ–Β–Β ―¹–Ψ–≤–Β―Ä―à–Β–Ϋ–Ϋ―΄―Ö –Φ–Β―²–Ψ–¥–Ψ–≤ –Κ–Μ–Α―¹―²–Β―Ä–Η–Ζ–Α―Ü–Η–Η!
- 62. –ü―Ä–Η–Ζ–Ϋ–Α–Κ–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –ö–Α–Κ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η –Φ―΄ –Φ–Ψ–Ε–Β–Φ –Η―¹–Ω–Ψ–Μ―¨–Ζ–Ψ–≤–Α―²―¨ –¥–Μ―è ―¹―Ä–Α–≤–Ϋ–Β–Ϋ–Η―è –Ω–Η–Κ―¹–Β–Μ–Β–Ι –Η ―Ä–Β–≥–Η–Ψ–Ϋ–Ψ–≤? βÄΔ –·―Ä–Κ–Ψ―¹―²―¨ βÄΔ –Π–≤–Β―² βÄΔ ?
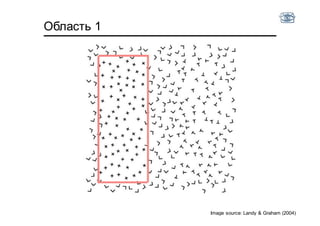
- 63. –ü―Ä–Η–Φ–Β―Ä Image source: Landy & Graham (2004) –£–Η–¥–Η―²–Β –Ψ―²–¥–Β–Μ―¨–Ϋ―΄–Β –Ψ–±–Μ–Α―¹―²–Η?
- 64. –û–±–Μ–Α―¹―²―¨ 1 Image source: Landy & Graham (2004)
- 65. –û–±–Μ–Α―¹―²―¨ 2 Image source: Landy & Graham (2004)
- 66. –û–±–Μ–Α―¹―²―¨ 2 Image source: Landy & Graham (2004)
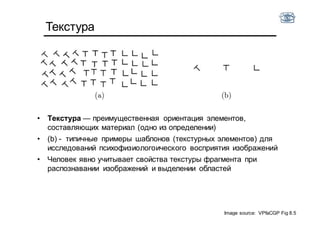
- 67. –Δ–Β–Κ―¹―²―É―Ä–Α Image source: VPfaCGP Fig 8.5 βÄΔ –Δ–Β–Κ―¹―²―É―Ä–Α βÄî –Ω―Ä–Β–Η–Φ―É―â–Β―¹―²–≤–Β–Ϋ–Ϋ–Α―è –Ψ―Ä–Η–Β–Ϋ―²–Α―Ü–Η―è ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–≤, ―¹–Ψ―¹―²–Α–≤–Μ―è―é―â–Η―Ö –Φ–Α―²–Β―Ä–Η–Α–Μ (–Ψ–¥–Ϋ–Ψ –Η–Ζ –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Η) βÄΔ (b) - ―²–Η–Ω–Η―΅–Ϋ―΄–Β –Ω―Ä–Η–Φ–Β―Ä―΄ ―à–Α–±–Μ–Ψ–Ϋ–Ψ–≤ (―²–Β–Κ―¹―²―É―Ä–Ϋ―΄―Ö ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–≤) –¥–Μ―è –Η―¹―¹–Μ–Β–¥–Ψ–≤–Α–Ϋ–Η–Ι –Ω―¹–Η―Ö–Ψ―³–Η–Ζ–Η–Ψ–Μ–Ψ–≥–Ψ–Η―΅–Β―¹–Κ–Ψ–≥–Ψ –≤–Ψ―¹–Ω―Ä–Η―è―²–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι βÄΔ –ß–Β–Μ–Ψ–≤–Β–Κ ―è–≤–Ϋ–Ψ ―É―΅–Η―²―΄–≤–Α–Β―² ―¹–≤–Ψ–Ι―¹―²–≤–Α ―²–Β–Κ―¹―²―É―Ä―΄ ―³―Ä–Α–≥–Φ–Β–Ϋ―²–Α –Ω―Ä–Η ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι –Η –≤―΄–¥–Β–Μ–Β–Ϋ–Η–Η –Ψ–±–Μ–Α―¹―²–Β–Ι
- 68. ¬Ϊ–ü―Ä–Ψ―¹―²―΄–Β –Κ–Μ–Β―²–Κ–Η¬Μ V1 βÄΔ –£ –Ω–Β―Ä–≤–Η―΅–Ϋ–Ψ–Ι –≤–Η–Ζ―É–Α–Μ―¨–Ϋ–Ψ–Ι –Κ–Ψ―Ä–Β –≥–Ψ–Μ–Ψ–≤–Ϋ–Ψ–≥–Ψ –Φ–Ψ–Ζ–≥–Α –Β―¹―²―¨ –Κ–Μ–Β―²–Κ–Η, ―΅―É–≤―¹―²–≤–Η―²–Β–Μ―¨–Ϋ―΄–Β –Κ –Κ―Ä–Α―è–Φ –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Ϋ–Ψ–Ι –Ψ―Ä–Η–Β–Ϋ―²–Α―Ü–Η–Η βÄΔ –î–Μ―è –Κ–Α–Ε–¥–Ψ–Ι –Ψ–±–Μ–Α―¹―²–Η –Β―¹―²―¨ –Ϋ–Α–±–Ψ―Ä ―²–Α–Κ–Η―Ö –Κ–Μ–Β―²–Ψ–Κ, ―΅―É–≤―¹―²–≤–Η―²–Β–Μ―¨–Ϋ―΄–Β –Κ –Ψ―Ä–Η–Β–Ϋ―²–Α―Ü–Η–Η ―ç–Μ–Β–Φ–Β–Ϋ―²–Ψ–≤ ―²–Β–Κ―¹―²―É―Ä―΄ βÄΔ –ö–Α–Κ –Η―Ö –Η–Ζ–Φ–Β―Ä―è―²―¨ βÄ™ –≤ ―¹–Μ–Β–¥―É―é―â–Β–Ι –Μ–Β–Κ―Ü–Η–Η
- 69. –ü―¹–Η―Ö–Ψ–Μ–Ψ–≥–Η―΅–Β―¹–Κ–Ψ–Β ―¹–≤–Ψ–Ι―¹―²–≤–Ψ ―²–Β–Κ―¹―²―É―Ä―΄ Image source: Todd et al. 2005
- 70. –Λ–Ψ―Ä–Φ–Α –Η–Ζ ―²–Β–Κ―¹―²―É―Ä―΄ βÄΔ –ß–Β–Μ–Ψ–≤–Β–Κ –Η–Ϋ―²―É–Η―²–Η–≤–Ϋ–Ψ ―¹―΅–Η―²–Α–Β―² ―²–Β–Κ―¹―²―É―Ä―É –Η–Ζ–Ψ―²―Ä–Ψ–Ω–Ϋ–Ψ–Ι, ―².–Β. ―¹ –Ω–Ψ―¹―²–Ψ―è–Ϋ–Ϋ―΄–Φ–Η ―¹–≤–Ψ–Ι―¹―²–≤–Α–Φ–Η –Ϋ–Α –Ω–Ψ–≤–Β―Ä―Ö–Ϋ–Ψ―¹―²–Η –Ψ–±―ä–Β–Κ―²–Α βÄΔ Shape from texture: –‰―¹―Ö–Ψ–¥―è –Η–Ζ –Ω―Ä–Β–¥–Ω–Ψ–Μ–Ψ–Ε–Β–Ϋ–Η―è –Ψ–± –Η–Ζ–Ψ―²―Ä–Ψ–Ω–Ϋ–Ψ―¹―²–Η ―à–Α–±–Μ–Ψ–Ϋ–Α ―²–Β–Κ―¹―²―É―Ä―΄, –Φ–Ψ–Ε–Ϋ–Ψ –Ψ–Ω―Ä–Β–¥–Β–Μ–Η―²―¨ –Ϋ–Α–Κ–Μ–Ψ–Ϋ –Ω–Ψ–≤–Β―Ä–Ϋ–Ψ―¹―²–Η Image source: VPfaCGP Fig 8.7
- 71. –Γ–Ψ–≤―Ä–Β–Φ–Β–Ϋ–Ϋ―΄–Β –Α–Μ–≥–Ψ―Ä–Η―²–Φ―΄ βÄΔ –½–Α–¥–Α―΅–Α ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι –Ω―Ä–Ψ–¥–Ψ–Μ–Ε–Α–Β―² –Α–Κ―²–Η–≤–Ϋ–Ψ –Η―¹―¹–Μ–Β–¥–Ψ–≤–Α―²―¨―¹―è. βÄΔ –‰–Ϋ–Ψ–≥–¥–Α –Η―¹–Ω–Ψ–Μ―¨–Ζ―É–Β―²―¹―è –Ψ–¥–Η–Ϋ –Ω―Ä–Η–Ζ–Ϋ–Α–Κ, –Η–Ϋ–Ψ–≥–¥–Α –Φ–Ϋ–Ψ–Ε–Β―¹―²–≤–Ψ βÄΔ –ü–Ψ–¥―Ä–Ψ–±–Ϋ–Β–Β –Α–Μ–≥–Ψ―Ä–Η―²–Φ―΄ ―¹–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η–Η ―Ä–Α―¹―¹–Φ–Α―²―Ä–Η–≤–Α―é―²―¹―è –≤ ―¹–Κ ¬Ϊ–î–Ψ–Ω. –≥–Μ–Α–≤―΄ –Κ–Ψ–Φ–Ω―¨―é―²–Β―Ä–Ϋ–Ψ–≥–Ψ –Ζ―Ä–Β–Ϋ–Η―è¬Μ
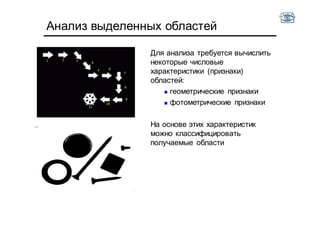
- 72. –ê–Ϋ–Α–Μ–Η–Ζ –≤―΄–¥–Β–Μ–Β–Ϋ–Ϋ―΄―Ö –Ψ–±–Μ–Α―¹―²–Β–Ι –î–Μ―è –Α–Ϋ–Α–Μ–Η–Ζ–Α ―²―Ä–Β–±―É–Β―²―¹―è –≤―΄―΅–Η―¹–Μ–Η―²―¨ –Ϋ–Β–Κ–Ψ―²–Ψ―Ä―΄–Β ―΅–Η―¹–Μ–Ψ–≤―΄–Β ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ–Η (–Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η) –Ψ–±–Μ–Α―¹―²–Β–Ι: ο¹° –≥–Β–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η ο¹° ―³–Ψ―²–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η –ù–Α –Ψ―¹–Ϋ–Ψ–≤–Β ―ç―²–Η―Ö ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ –Φ–Ψ–Ε–Ϋ–Ψ –Κ–Μ–Α―¹―¹–Η―³–Η―Ü–Η―Ä–Ψ–≤–Α―²―¨ –Ω–Ψ–Μ―É―΅–Α–Β–Φ―΄–Β –Ψ–±–Μ–Α―¹―²–Η
- 73. –™–Β–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η –î–Μ―è –Κ–Α–Ε–¥–Ψ–Ι –Ψ–±–Μ–Α―¹―²–Η –Φ–Ψ–Ε–Ϋ–Ψ –Ω–Ψ–¥―¹―΅–Η―²–Α―²―¨ –Ϋ–Β–Κ–Η–Ι –Ϋ–Α–±–Ψ―Ä –Ω―Ä–Ψ―¹―²–Β–Ι―à–Η―Ö ―΅–Η―¹–Μ–Ψ–≤―΄―Ö ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ: βÄΔ –ü–Μ–Ψ―â–Α–¥―¨ βÄΔ –Π–Β–Ϋ―²―Ä –Φ–Α―¹―¹ βÄΔ –ü–Β―Ä–Η–Φ–Β―²―Ä βÄΔ –ö–Ψ–Φ–Ω–Α–Κ―²–Ϋ–Ψ―¹―²―¨ βÄΔ –û―Ä–Η–Β–Ϋ―²–Α―Ü–Η―é –≥–Μ–Α–≤–Ϋ–Ψ–Ι –Ψ―¹–Η –Η–Ϋ–Β―Ä―Ü–Η–Η βÄΔ –Θ–¥–Μ–Η–Ϋ–Β–Ϋ–Ϋ–Ψ―¹―²―¨ (―ç–Κ―¹―Ü–Β–Ϋ―²―Ä–Η―¹–Η―²–Β―²)
- 74. –ü–Μ–Ψ―â–Α–¥―¨ –Η ―Ü–Β–Ϋ―²―Ä –Φ–Α―¹―¹ βÄΔ –ü–Μ–Ψ―â–Α–¥―¨ βÄ™ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ –Ω–Η–Κ―¹–Β–Μ–Β–Ι –≤ –Ψ–±–Μ–Α―¹―²–Η; οÉΞοÉΞοÄΫ οÄΫ οÄΫ m x n y yxIA 0 0 ),( A yxyI y A yxxI x m x n y m x n y οÉΞοÉΞοÉΞοÉΞ οÄΫ οÄΫοÄΫ οÄΫ οÄΫοÄΫ 0 00 0 ),( ; ),( βÄΔ –Π–Β–Ϋ―²―Ä –Φ–Α―¹―¹
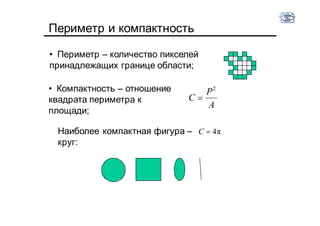
- 75. –ü–Β―Ä–Η–Φ–Β―²―Ä –Η –Κ–Ψ–Φ–Ω–Α–Κ―²–Ϋ–Ψ―¹―²―¨ βÄΔ –ö–Ψ–Φ–Ω–Α–Κ―²–Ϋ–Ψ―¹―²―¨ βÄ™ –Ψ―²–Ϋ–Ψ―à–Β–Ϋ–Η–Β –Κ–≤–Α–¥―Ä–Α―²–Α –Ω–Β―Ä–Η–Φ–Β―²―Ä–Α –Κ –Ω–Μ–Ψ―â–Α–¥–Η; –ù–Α–Η–±–Ψ–Μ–Β–Β –Κ–Ψ–Φ–Ω–Α–Κ―²–Ϋ–Α―è ―³–Η–≥―É―Ä–Α βÄ™ –Κ―Ä―É–≥: A P C 2 οÄΫ œÄ4οÄΫC βÄΔ –ü–Β―Ä–Η–Φ–Β―²―Ä βÄ™ –Κ–Ψ–Μ–Η―΅–Β―¹―²–≤–Ψ –Ω–Η–Κ―¹–Β–Μ–Β–Ι –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Α―â–Η―Ö –≥―Ä–Α–Ϋ–Η―Ü–Β –Ψ–±–Μ–Α―¹―²–Η;
- 76. –ü–Ψ–¥―¹―΅–Β―² –Ω–Β―Ä–Η–Φ–Β―²―Ä–Α –Ψ–±–Μ–Α―¹―²–Η 1. –ü–Η–Κ―¹–Β–Μ―¨ –Μ–Β–Ε–Η―² –Ϋ–Α –≥―Ä–Α–Ϋ–Η―Ü–Β –Ψ–±–Μ–Α―¹―²–Η, –Β―¹–Μ–Η –Ψ–Ϋ ―¹–Α–Φ –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―² –Ψ–±–Μ–Α―¹―²–Η –Η ―Ö–Ψ―²―è –±―΄ –Ψ–¥–Η–Ϋ –Η–Ζ –Β–≥–Ψ ―¹–Ψ―¹–Β–¥–Β–Ι –Ψ–±–Μ–Α―¹―²–Η –Ϋ–Β –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―². (–≤–Ϋ―É―²―Ä–Β–Ϋ–Ϋ―è―è –≥―Ä–Α–Ϋ–Η―Ü–Α) 2. –ü–Η–Κ―¹–Β–Μ―¨ –Μ–Β–Ε–Η―² –Ϋ–Α –≥―Ä–Α–Ϋ–Η―Ü–Β –Ψ–±–Μ–Α―¹―²–Η, –Β―¹–Μ–Η –Ψ–Ϋ ―¹–Α–Φ –Ϋ–Β –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―² –Ψ–±–Μ–Α―¹―²–Η –Η ―Ö–Ψ―²―è –±―΄ –Ψ–¥–Η–Ϋ –Η–Ζ –Β–≥–Ψ ―¹–Ψ―¹–Β–¥–Β–Ι –Ψ–±–Μ–Α―¹―²–Η –Ω―Ä–Η–Ϋ–Α–¥–Μ–Β–Ε–Η―². (–≤–Ϋ–Β―à–Ϋ―è―è –≥―Ä–Α–Ϋ–Η―Ü–Α) –ü–Β―Ä–Η–Φ–Β―²―Ä –Ζ–Α–≤–Η―¹–Η―² ―²–Α–Κ–Ε–Β –Ψ―² ―²–Ψ–≥–Ψ 4-―Ö –Η–Μ–Η 8-–Φ–Η ―¹–≤―è–Ζ–Ϋ–Ψ―¹―²―¨ –Η―¹–Ω–Ψ–Μ―¨–Ζ―É–Β―²―¹―è –¥–Μ―è –Ψ–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η―è ―¹–Ψ―¹–Β–¥–Β–Ι.
- 77. –ü―Ä–Η–Φ–Β―Ä –Ω–Β―Ä–Η–Φ–Β―²―Ä–Ψ–≤ –Ψ–±–Μ–Α―¹―²–Η –û–±–Μ–Α―¹―²―¨ –£–Ϋ―É―²―Ä–Β–Ϋ–Ϋ―è―è –≥―Ä–Α–Ϋ–Η―Ü–Α –£–Ϋ–Β―à–Ϋ―è―è –≥―Ä–Α–Ϋ–Η―Ü–Α
- 78. –û–Ω–Β―Ä–Α―Ü–Η―è –Ψ–Κ–Ψ–Ϋ―²―É―Ä–Η–≤–Α–Ϋ–Η―è –Ψ–±―ä–Β–Κ―²–Α –ü―Ä–Η ―Ä–Α–±–Ψ―²–Β ―¹ –±–Η–Ϋ–Α―Ä–Ϋ―΄–Φ–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è–Φ–Η –Κ–Ψ–Ϋ―²―É―Ä―΄ –Ψ–±―ä–Β–Κ―²–Α –Φ–Ψ–Ε–Ϋ–Ψ –Ω–Ψ–Μ―É―΅–Η―²―¨ ―¹ –Ω–Ψ–Φ–Ψ―â―¨―é –Ψ–Ω–Β―Ä–Α―Ü–Η–Ι –Φ–Α―²–Β–Φ–Α―²–Η―΅–Β―¹–Κ–Ψ–Ι –Φ–Ψ―Ä―³–Ψ–Μ–Ψ–≥–Η–Η –£–Ϋ―É―²―Ä–Β–Ϋ–Ϋ–Β–Β –Ψ–Κ–Ψ–Ϋ―²―É―Ä–Η–≤–Α–Ϋ–Η–Β βÄΔ CI = A βÄ™ (A (-) B) –£–Ϋ–Β―à–Ϋ–Β–Β –Ψ–Κ–Ψ–Ϋ―²―É―Ä–Η–≤–Α–Ϋ–Η–Β βÄΔ CO = (A (+) B) βÄ™ A
- 80. –Γ―²–Α―²–Η―¹―²–Η―΅–Β―¹–Κ–Η–Β –Φ–Ψ–Φ–Β–Ϋ―²―΄ –Ψ–±–Μ–Α―¹―²–Η –î–Η―¹–Κ―Ä–Β―²–Ϋ―΄–Ι ―Ü–Β–Ϋ―²―Ä–Α–Μ―¨–Ϋ―΄–Ι –Φ–Ψ–Φ–Β–Ϋ―² mij –Ψ–±–Μ–Α―¹―²–Η –Ψ–Ω―Ä–Β–¥–Β–Μ―è–Β―²―¹―è ―¹–Μ–Β–¥―É―é―â–Η–Φ –Ψ–±―Ä–Α–Ζ–Ψ–Φ: οÉΞοÉé οÄ≠οÄ≠οÄΫ n Syx ji ji yxIyyxxm , ),()()( –Π–Β–Ϋ―²―Ä –Φ–Α―¹―¹ –Ψ–±–Μ–Α―¹―²–Η
- 81. –‰–Ϋ–≤–Α―Ä–Η–Α–Ϋ―²–Ϋ―΄–Β ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ–Η –î–Μ―è ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η―è –Ϋ–Α―¹ –Η–Ϋ―²–Β―Ä–Β―¹―É―é―² ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ–Η –Η–Ϋ–≤–Α―Ä–Η–Α–Ϋ―²–Ϋ―΄–Β –Ω–Ψ –Ψ―²–Ϋ–Ψ―à–Β–Ϋ–Η―é –Κ –Φ–Α―¹―à―²–Α–±–Η―Ä–Ψ–≤–Α–Ϋ–Η―é, –Ω–Β―Ä–Β–Ϋ–Ψ―¹―É, –Ω–Ψ–≤–Ψ―Ä–Ψ―²―É: ο¹° –Θ–¥–Μ–Η–Ϋ–Β–Ϋ–Ϋ–Ψ―¹―²―¨, –Ϋ–Β―Ü–Β–Ϋ―²―Ä–Η―Ä–Ψ–≤–Α–Ϋ–Ϋ–Ψ―¹―²―¨ (―ç–Κ―¹―Ü–Β–Ϋ―²―Ä–Η―¹–Η―²–Β―²) ο¹° –ö–Ψ–Φ–Ω–Α–Κ―²–Ϋ–Ψ―¹―²―¨ A P C 2 οÄΫ 2 11 2 02200220 2 11 2 02200220 4)( 4)( mmmmm mmmmm elongation οÄΪοÄ≠οÄ≠οÄΪ οÄΪοÄ≠οÄΪοÄΪ οÄΫ A E οÄΫ A B B
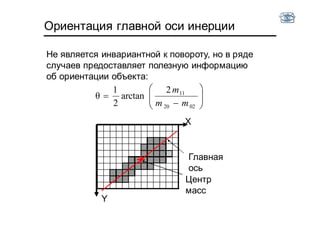
- 82. –û―Ä–Η–Β–Ϋ―²–Α―Ü–Η―è –≥–Μ–Α–≤–Ϋ–Ψ–Ι –Ψ―¹–Η –Η–Ϋ–Β―Ä―Ü–Η–Η –ù–Β ―è–≤–Μ―è–Β―²―¹―è –Η–Ϋ–≤–Α―Ä–Η–Α–Ϋ―²–Ϋ–Ψ–Ι –Κ –Ω–Ψ–≤–Ψ―Ä–Ψ―²―É, –Ϋ–Ψ –≤ ―Ä―è–¥–Β ―¹–Μ―É―΅–Α–Β–≤ –Ω―Ä–Β–¥–Ψ―¹―²–Α–≤–Μ―è–Β―² –Ω–Ψ–Μ–Β–Ζ–Ϋ―É―é –Η–Ϋ―³–Ψ―Ä–Φ–Α―Ü–Η―é –Ψ–± –Ψ―Ä–Η–Β–Ϋ―²–Α―Ü–Η–Η –Ψ–±―ä–Β–Κ―²–Α: οÉΖοÉΖ οÉΗ οÉΕ οÉßοÉß οÉ® οÉΠ οÄ≠ οÄΫ 0220 112 arctan 2 1 ΈΗ mm m X Y –™–Μ–Α–≤–Ϋ–Α―è –Ψ―¹―¨ –Π–Β–Ϋ―²―Ä –Φ–Α―¹―¹
- 84. –Λ–Ψ―²–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η –î–Μ―è –Κ–Α–Ε–¥–Ψ–Ι –Ψ–±–Μ–Α―¹―²–Η –Φ–Ψ–Ε–Ϋ–Ψ –Ω–Ψ–¥―¹―΅–Η―²–Α―²―¨ –Ϋ–Β–Κ–Η–Ι –Ϋ–Α–±–Ψ―Ä –Ω―Ä–Ψ―¹―²–Β–Ι―à–Η―Ö ―΅–Η―¹–Μ–Ψ–≤―΄―Ö ―Ö–Α―Ä–Α–Κ―²–Β―Ä–Η―¹―²–Η–Κ: βÄΔ –Γ―Ä–Β–¥–Ϋ―è―è ―è―Ä–Κ–Ψ―¹―²―¨ βÄΔ –Γ―Ä–Β–¥–Ϋ–Η–Ι ―Ü–≤–Β―² (–Β―¹–Μ–Η –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β ―Ü–≤–Β―²–Ϋ–Ψ–Β) βÄΔ –†–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β ―è―Ä–Κ–Ψ―¹―²–Η –Η–Μ–Η ―Ü–≤–Β―²–Α βÄΔ –ü―Ä–Η–Ζ–Ϋ–Α–Κ–Η ―²–Β–Κ―¹―²―É―Ä―΄ βÄΔ –ü―Ä–Ψ ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η–Β ―Ü–≤–Β―²–Ψ–≤ –Η ―²–Β–Κ―¹―²―É―Ä–Ϋ―΄–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η –±―É–¥–Β–Φ –≥–Ψ–≤–Ψ―Ä–Η―²―¨ –Ψ―²–¥–Β–Μ―¨–Ϋ–Ψ –¥–Α–Μ―¨―à–Β –†–Α–Ζ―É–Φ–Β–Β―²―¹―è, –≤―¹–Β ―ç―²–Ψ ―¹―΅–Η―²–Α–Β―²―¹―è –Ω–Ψ –Η―¹―Ö–Ψ–¥–Ϋ–Ψ–Φ―É, –Α –Ϋ–Β –±–Η–Ϋ–Α―Ä–Ϋ–Ψ–Φ―É –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―é!
- 85. –ö–Α–Κ –Α–Ϋ–Α–Μ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η βÄΔ –ü―Ä–Η–Φ–Β―Ä βÄ™ –Μ–Ψ–Ε–Κ–Η –Η ―¹–Α―Ö–Α―Ä
- 86. –ö–Α–Κ –Α–Ϋ–Α–Μ–Η–Ζ–Η―Ä–Ψ–≤–Α―²―¨ –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η βÄΔ –ö–Α–Κ –≤–Ψ―¹–Ω–Ψ–Μ―¨–Ζ–Ψ–≤–Α―²―¨―¹―è –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Α–Φ–Η –¥–Μ―è –Κ–Μ–Α―¹―¹–Η―³–Η–Κ–Α―Ü–Η–Η? βÄΔ –ü–Ψ–¥–Ψ–±―Ä–Α―²―¨ –¥–Η–Α–Ω–Α–Ζ–Ψ–Ϋ―΄ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Ι –¥–Μ―è ―Ä–Α–Ζ–Ϋ―΄―Ö –Κ–Μ–Α―¹―¹–Ψ–≤ –≤―Ä―É―΅–Ϋ―É―é, ―ç–Κ―¹–Ω–Β―Ä–Η–Φ–Β–Ϋ―²–Α–Μ―¨–Ϋ–Ψ (–Φ–Ψ–Ε–Β―² –±―΄―²―¨ –≤–Β―¹―¨–Φ–Α ―²―Ä―É–¥–Ψ–Β–Φ–Κ–Ψ) βÄΔ –ü–Ψ–¥–Ψ–±―Ä–Α―²―¨ –¥–Η–Α–Ω–Α–Ζ–Ψ–Ϋ―΄ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η–Ι –≥―Ä–Α―³–Η―΅–Β―¹–Κ–Η (–Ϋ―É–Ε–Ϋ–Α –±–Α–Ζ–Α –¥–Μ―è ―²―Ä–Β–Ϋ–Η―Ä–Ψ–≤–Κ–Η, ―²―Ä―É–¥–Ϋ–Ψ, –Β―¹–Μ–Η –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Ψ–≤ –Φ–Ϋ–Ψ–≥–Ψ) βÄΔ –û–±―É―΅–Η―²―¨ –Κ–Μ–Α―¹―¹–Η―³–Η–Κ–Α―²–Ψ―Ä ―¹ –Ω–Ψ–Φ–Ψ―â―¨―é –Φ–Α―à–Η–Ϋ–Ϋ–Ψ–≥–Ψ –Ψ–±―É―΅–Β–Ϋ–Η―è
- 87. –†―É―΅–Ϋ–Ψ–Ι –Ω–Ψ–¥–±–Ψ―Ä βÄΔ –‰–Ζ –Ψ–±―â–Η―Ö ―¹–Ψ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι: βÄΔ –¦–Ψ–Ε–Κ–Η –±–Ψ–Μ–Β–Β –≤―΄―²―è–Ϋ―É―²―΄–Β, ―΅–Β–Φ ―¹–Α―Ö–Α―Ä–Ϋ―΄–Β –Κ―É―¹–Ψ―΅–Κ–Η βÄΔ –¦–Ψ–Ε–Κ–Η –±–Ψ–Μ―¨―à–Β ―΅–Β–Φ ―¹–Α―Ö–Α―Ä–Ϋ―΄–Β –Κ―É―¹–Ψ―΅–Κ–Η βÄΔ –Γ–Α―Ö–Α―Ä–Ϋ―΄–Β –Κ―É―¹–Ψ―΅–Κ–Η –Κ–≤–Α–¥―Ä–Α―²–Ϋ―΄–Β βÄΔ –û–±–Μ–Α―¹―²–Η –Ω–Ψ―è–≤–Μ―è―é―â–Η–Β―¹―è –Η–Ζ-–Ζ–Α ―à―É–Φ–Α –Ψ–±―΄―΅–Ϋ–Ψ –Ϋ–Β–±–Ψ–Μ―¨―à–Η–Β –Η –Ϋ–Β–Κ–≤–Α–¥―Ä–Α―²–Ϋ―΄–Β βÄΔ –ü―΄―²–Α–Β–Φ―¹―è ―¹–Κ–Ψ–Ϋ―¹―²―Ä―É–Η―Ä–Ψ–≤–Α―²―¨ ―Ä–Β―à–Α―é―â–Β–Β –Ω―Ä–Α–≤–Η–Μ–Ψ, –Ω―Ä–Ψ–≤–Β―Ä―è–Β–Φ ―ç–Κ―¹–Ω–Β―Ä–Η–Φ–Β–Ϋ―²–Α–Μ―¨–Ϋ–Ψ βÄΔ –€–Ψ–Ε–Β―² –±―΄―²―¨ –≤–Β―¹―¨–Φ–Α ―É―²–Ψ–Φ–Η―²–Β–Μ―¨–Ϋ–Ψ
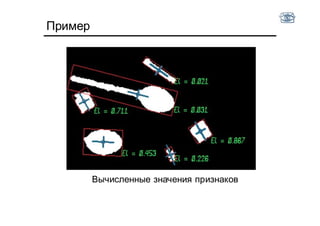
- 88. –ü―Ä–Η–Φ–Β―Ä―΄
- 89. –™―Ä–Α―³–Η―΅–Β―¹–Κ–Η–Ι –Α–Ϋ–Α–Μ–Η–Ζ βÄΔ –Γ–Ψ–±―Ä–Α―²―¨ ―²―Ä–Β–Ϋ–Η―Ä–Ψ–≤–Ψ―΅–Ϋ―É―é –±–Α–Ζ―É –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Ι βÄΔ –™–¥–Β ―²–Ψ–Μ―¨–Κ–Ψ –Μ–Ψ–Ε–Κ–Η βÄΔ –™–¥–Β ―²–Ψ–Μ―¨–Κ–Ψ ―¹–Α―Ö–Α―Ä βÄΔ –™–¥–Β ―²–Ψ–Μ―¨–Κ–Ψ ―à―É–Φ –ö–Α–Κ –Ω–Ψ–Μ―É―΅–Η―²―¨ ―²–Α–Κ–Η–Β? –î–Α –Ω―Ä–Ψ―¹―²–Ψ –Ζ–Α–Κ―Ä–Α―¹–Η―²―¨ –≤―¹–Β –Ψ―¹―²–Α–Μ―¨–Ϋ–Ψ–Β. βÄΔ –ë―Ä–Α―²―¨ –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η –Η ―¹―²―Ä–Ψ–Η―²―¨ –≥―Ä–Α―³–Η–Κ–Η
- 90. –™―Ä–Α―³–Η―΅–Β―¹–Κ–Η–Ι –Α–Ϋ–Α–Μ–Η–Ζ βÄΔ –î–Η–Α–≥―Ä–Α–Φ–Φ–Α ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η―è ―ç–Κ―¹―Ü–Β–Ϋ―²―Ä–Η―¹–Η―²–Β―²–Α (–Ω―Ä–Ψ–±–Μ–Β–Φ–Α βÄ™ –Ϋ–Β –Ω–Ψ–Μ―É―΅–Α–Β―²―¹―è –Ψ―²–Μ–Η―΅–Η―²―¨ ―à―É–Φ –Ψ―² –Μ–Ψ–Ε–Β–Κ) 1 2 3 4 5 6 7 8 9 10 11 12 –¦–Ψ–Ε–Κ–Η 0 0.2 0.4 0.6 0.8 1 –≠–Κ―¹―Ü–Β–Ϋ―²―Ä–Η―¹–Η―²–Β―² –ü―Ä–Η–Φ–Β―Ä―΄ –¦–Ψ–Ε–Κ–Η –®―É–Φ –Γ–Α―Ö–Α―Ä
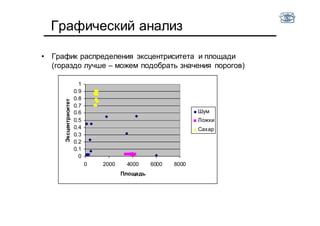
- 91. –™―Ä–Α―³–Η―΅–Β―¹–Κ–Η–Ι –Α–Ϋ–Α–Μ–Η–Ζ βÄΔ –™―Ä–Α―³–Η–Κ ―Ä–Α―¹–Ω―Ä–Β–¥–Β–Μ–Β–Ϋ–Η―è ―ç–Κ―¹―Ü–Β–Ϋ―²―Ä–Η―¹–Η―²–Β―²–Α –Η –Ω–Μ–Ψ―â–Α–¥–Η (–≥–Ψ―Ä–Α–Ζ–¥–Ψ –Μ―É―΅―à–Β βÄ™ –Φ–Ψ–Ε–Β–Φ –Ω–Ψ–¥–Ψ–±―Ä–Α―²―¨ –Ζ–Ϋ–Α―΅–Β–Ϋ–Η―è –Ω–Ψ―Ä–Ψ–≥–Ψ–≤) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 2000 4000 6000 8000 –ü–Μ–Ψ―â–Α–¥―¨ –≠–Κ―¹―Ü–Β–Ϋ―²―Ä–Η―¹–Η―²–Β―² –®―É–Φ –¦–Ψ–Ε–Κ–Η –Γ–Α―Ö–Α―Ä
- 92. –€–Α―à–Η–Ϋ–Ϋ–Ψ–Β –Ψ–±―É―΅–Β–Ϋ–Η–Β βÄΔ –ü―Ä–Η―΅–Η–Ϋ–Α –±―É―Ä–Ϋ–Ψ–≥–Ψ ―Ä–Α–Ζ–≤–Η―²–Η―è –Κ–Ψ–Φ–Ω―¨―é―²–Β―Ä–Ϋ–Ψ–≥–Ψ –Ζ―Ä–Β–Ϋ–Η―è –≤ –Ω–Ψ―¹–Μ–Β–¥–Ϋ–Η–Β –≥–Ψ–¥―΄. βÄΔ –Δ―Ä–Β–±―É―é―²―¹―è –±–Ψ–Μ―¨―à–Η–Β –Κ–Ψ–Μ–Μ–Β–Κ―Ü–Η–Η –Ω―Ä–Η–Φ–Β―Ä–Ψ–≤ –¥–Μ―è –Ψ–±―É―΅–Β–Ϋ–Η―è. βÄΔ –ü–Ψ―¹–Φ–Ψ―²―Ä–Η–Φ –Ψ–¥–Η–Ϋ –Η–Ζ –Φ–Β―²–Ψ–¥–Ψ–≤ –Ϋ–Α 4–Ψ–Ι –Μ–Β–Κ―Ü–Η–Η
- 93. –Γ―Ö–Β–Φ–Α –Ω―Ä–Ψ―¹―²–Ψ–≥–Ψ –Α–Μ–≥–Ψ―Ä–Η―²–Φ–Α –ü―Ä–Β–¥–Ψ–±―Ä–Α–±–Ψ―²–Κ–Α –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –£―΄―΅–Η―¹–Μ–Β–Ϋ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Ψ–≤ ―¹–Β–≥–Φ–Β–Ϋ―²–Ψ–≤ –Η –Κ–Μ–Α―¹―¹–Η―³–Η–Κ–Α―Ü–Η―è
- 94. –†–Β–Ζ―é–Φ–Β –Μ–Β–Κ―Ü–Η–Η βÄΔ –Γ–Β–≥–Φ–Β–Ϋ―²–Α―Ü–Η―è –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η―è –Ω–Ψ–Ζ–≤–Ψ–Μ―è–Β―² ―Ä–Α–±–Ψ―²–Α―²―¨ –Ϋ–Β ―¹–Ψ –≤―¹–Β–Φ –Η–Ζ–Ψ–±―Ä–Α–Ε–Β–Ϋ–Η–Β–Φ –≤ ―Ü–Β–Μ–Ψ–Φ, –Α ―¹ –Ψ―²–¥–Β–Μ―¨–Ϋ―΄–Φ–Η –Ζ–Ϋ–Α―΅–Η–Φ―΄–Φ–Η ―³―Ä–Α–≥–Φ–Β–Ϋ―²–Α–Φ–Η βÄΔ –Γ–Β–≥–Φ–Β–Ϋ―²―΄ –Φ–Ψ–≥―É―² –≤―΄–±–Η―Ä–Α―²―¨―¹―è –Ω–Ψ –Κ―Ä–Η―²–Β―Ä–Η―è–Φ –Ψ–¥–Ϋ–Ψ―Ä–Ψ–¥–Ϋ–Ψ―¹―²–Η –Ω–Ψ ―è―Ä–Κ–Ψ―¹―²–Η, ―Ü–≤–Β―²―É, ―²–Β–Κ―¹―²―É―Ä–Β –Η –Ω–Ψ –Κ–Ψ–Φ–±–Η–Ϋ–Α―Ü–Η–Η ―ç―²–Η―Ö –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Ψ–≤ βÄΔ –£ –Ψ―²–¥–Β–Μ―¨–Ϋ―΄―Ö ―¹–Μ―É―΅–Α―è―Ö –Φ―΄ –Φ–Ψ–Ε–Β–Φ ―Ä–Β―à–Η―²―¨ –Ζ–Α–¥–Α―΅―É ―Ä–Α―¹–Ω–Ψ–Ζ–Ϋ–Α–≤–Α–Ϋ–Η―è, –Α–Ϋ–Α–Μ–Η–Ζ–Η―Ä―É―è –≥–Β–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Η ―³–Ψ―²–Ψ–Φ–Β―²―Ä–Η―΅–Β―¹–Κ–Η–Β –Ω―Ä–Η–Ζ–Ϋ–Α–Κ–Η ―¹–Β–≥–Φ–Β–Ϋ―²–Ψ–≤