Dining philosopher
Download as PPTX, PDF3 likes5,022 views

Dining Philosopherâs Problem Possibility of Deadlock Possibility of Starvation Critical Regions Semaphore Algorithms

![Dining-Philosophers Problem
Shared data : semaphore chopstick[5];
// Initialized to 1](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-7-320.jpg)
![Dining-Philosophers Problem
Philosopher i
do {
wait(chopstick[i])
wait(chopstick[(i+1)% 5])
eat
signal(chopstick[i]);
signal(chopstick[(i+1)% 5])
think
} while (1);](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-8-320.jpg)














![ï Fork Available[i] is a Boolean variable for each Pi - Pi+1 pair,
which indicates whether the fork between them is available.
ï The subtractions and additions are to be interpreted modulo n
We toss a coin when the hungry philosopher decides whether
to pick up the left fork or the right one first.
This randomization prevents any evil adversary's scheme. We
can show that the algorithm is deadlock free.
ContinueâĶ.](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-25-320.jpg)

![17 December 2018
Monitor
Dining Philosophers Example
monitor dp
{
enum {thinking, hungry, eating} state[5];
condition self[5];
void pickup(int i) // Following slides
void putdown(int i) // Following slides
void test(int i) // Following slides
void init() {
for (int i = 0; i < 5; i++)
state[i] = thinking;
}
}](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-28-320.jpg)
![17 December 2018
Dining Philosophers
void pickup(int i) {
state[i] = hungry;
test(i);
if (state[i] != eating)
self[i].wait();
}](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-29-320.jpg)
![17 December 2018
void putdown(int i) {
state[i] = thinking;
// test left and right
// neighbors
test((i+4) % 5);
test((i+1) % 5);
}
Dining Philosophers](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-30-320.jpg)
![17 December 2018
void test(int i) {
if ((state[(i+4)%5]!= eating)
&& (state[i] == hungry) &&
(state[(i+1)%5]!= eating))
{
state[i] = eating;
self[i].signal();
}
}
Dining Philosophers](https://image.slidesharecdn.com/diningphilosopher-181217071044/85/Dining-philosopher-31-320.jpg)




























More Related Content
What's hot (20)
More from .AIR UNIVERSITY ISLAMABAD (6)




Recently uploaded (20)

















Dining philosopher
- 2. Group members: ROLL NO: ROLL NO: ROLL NO: ROLL NO: ROLL NO: Group No 02 University of Azad Jammu & Kashmir Neelum Campus BSCS V Semester, 2014-18 Operating System Topic: Dining Philosophers Presented By: Mansoor Bashir
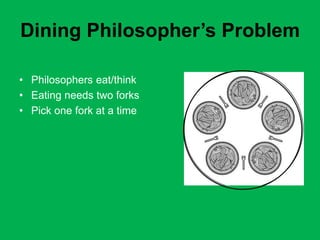
- 3. Dining Philosopherâs Problem âĒ Philosophers eat/think âĒ Eating needs two forks âĒ Pick one fork at a time
- 4. Dining Philosophers Problem ïFive philosophers who spend their lives just thinking and eating. ïOnly five chopsticks are available to the philosophers
- 5. Dining Philosophers Problem ïEach philosopher thinks. When he becomes hungry, he sits down and picks up the two chopsticks that are closest to him and eats. ïAfter a philosopher finishes eating, he puts down the chopsticks and starts to think.
- 7. Dining-Philosophers Problem Shared data : semaphore chopstick[5]; // Initialized to 1
- 8. Dining-Philosophers Problem Philosopher i do { wait(chopstick[i]) wait(chopstick[(i+1)% 5]) eat signal(chopstick[i]); signal(chopstick[(i+1)% 5]) think } while (1);
- 9. Possibility of Deadlock If all philosophers become hungry at the same time and pick up their left chopstick, a deadlock occurs.
- 10. 17 December 2018 Possible Solutions ï§ Allow at most four philosophers to be sitting simultaneously at the table. ï§ Allow a philosopher to pick up his/her chopsticks only if both chopsticks are available (to do this she must pick them up in a critical section)
- 11. 17 December 2018 Possible Solutions Use an asymmetric solution; that is, an odd philosopher picks up first her left chopstick, whereas an even philosopher picks up her right chopstick and then her left chopstick.
- 12. 17 December 2018 Possibility of Starvation ï§ Two philosophers who are fast eaters and fast thinkers, and lock the chopsticks before others every time.
- 13. 17 December 2018 Critical Regions A critical region is a section of code that is always executed under mutual exclusion.
- 14. 17 December 2018 Critical Regions ï§ They consist of two parts: 1.Variables that must be accessed under mutual exclusion. 2.A new language statement that identifies a critical region in which the variables are accessed.
- 16. Types of Semaphores ï Counting semaphore â integer value can range over an unrestricted integer domain. ï Binary semaphore â integer value cannot be > 1; can be simpler to implement.
- 17. Implementing a Counting Semaphore ï§ Data structures binary-semaphore S1, S2; int C; ï§ Initialization S1 = 1 S2 = 0 C = initial value of semaphore S
- 18. wait(S1); C--; if (C < 0) { signal(S1); wait(S2); } signal(S1); Implementing a Counting Semaphore wait(S):
- 19. wait(S1); C++; if (C <= 0) signal(S2); else signal(S1); Implementing a Counting Semaphore signal(S):
- 20. i. Deterministic algorithms ii. Randomized algorithm Algorithms Two Algorithm for dining Philosophers:
- 21. Two goals to achieve in solving the problem: Deadlock free -- if at any time there is a hungry philosopher, then eventually some philosopher will eat. Lockout free -- every hungry philosopher eventually gets to eat. The configuration of philosophers and sticks for the case of n = 5 is illustrated below:
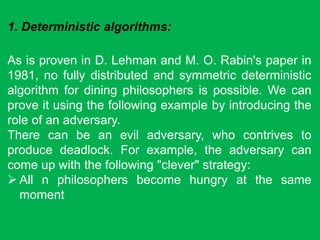
- 22. 1. Deterministic algorithms: As is proven in D. Lehman and M. O. Rabin's paper in 1981, no fully distributed and symmetric deterministic algorithm for dining philosophers is possible. We can prove it using the following example by introducing the role of an adversary. There can be an evil adversary, who contrives to produce deadlock. For example, the adversary can come up with the following "clever" strategy: ï All n philosophers become hungry at the same moment
- 23. ï They each pick up their left fork simultaneously ï because of the symmetry and the fact that each philosopher's behavior is strictly deterministic, they have no choice but to put down their sticks and try again later still precisely at the same time. By repeating this cycle constantly, the adversary will be able to bring deadlock into this problem, thus makes any deterministic algorithms fail to work. ContinueâĶ.
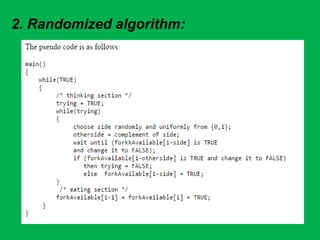
- 25. ï Fork Available[i] is a Boolean variable for each Pi - Pi+1 pair, which indicates whether the fork between them is available. ï The subtractions and additions are to be interpreted modulo n We toss a coin when the hungry philosopher decides whether to pick up the left fork or the right one first. This randomization prevents any evil adversary's scheme. We can show that the algorithm is deadlock free. ContinueâĶ.
- 26. The proof is based on that the coin tosses made by philosophers are independent random events. Thus, even if the adversary scheduler tries to bring on deadlock, a combination of tosses will finally arise that enables some philosopher to obtain two sticks. As the index number (0,1,...i) attached to a philosopher is for naming only, the algorithm is totally symmetric. ContinueâĶ.
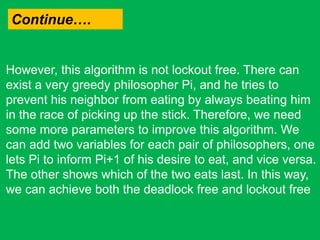
- 27. However, this algorithm is not lockout free. There can exist a very greedy philosopher Pi, and he tries to prevent his neighbor from eating by always beating him in the race of picking up the stick. Therefore, we need some more parameters to improve this algorithm. We can add two variables for each pair of philosophers, one lets Pi to inform Pi+1 of his desire to eat, and vice versa. The other shows which of the two eats last. In this way, we can achieve both the deadlock free and lockout free ContinueâĶ.
- 28. 17 December 2018 Monitor Dining Philosophers Example monitor dp { enum {thinking, hungry, eating} state[5]; condition self[5]; void pickup(int i) // Following slides void putdown(int i) // Following slides void test(int i) // Following slides void init() { for (int i = 0; i < 5; i++) state[i] = thinking; } }
- 29. 17 December 2018 Dining Philosophers void pickup(int i) { state[i] = hungry; test(i); if (state[i] != eating) self[i].wait(); }
- 30. 17 December 2018 void putdown(int i) { state[i] = thinking; // test left and right // neighbors test((i+4) % 5); test((i+1) % 5); } Dining Philosophers
- 31. 17 December 2018 void test(int i) { if ((state[(i+4)%5]!= eating) && (state[i] == hungry) && (state[(i+1)%5]!= eating)) { state[i] = eating; self[i].signal(); } } Dining Philosophers
- 32. THANK YOU