

![Viášŋt chÆ°ÆĄng trÃŽnh cho âmain.câ nhÆ° sau:
#include <msp430g2553.h>
#include <stdbool.h>
////////////////Defines////////////////
#define LED1 BIT6
#define LED0 BIT0
#define DAT BIT0 //P2.0 //input signal port
#define VCC BIT5 //P1.5
#define GND BIT4 //P1.4
#define KICH BIT1
char charbuffer[8];
int i=0;
int j=0;
unsigned int capture_array[51]; // RAM array for captures
int tick=0;
int cap=0;
int pre_cap=0;
int first_pulse=0;
////////////////Function Protos////////////////
void TX(char *tx_message);
void DO_KHOANG_CACH(void);
static char *i2a(unsigned i, char *a, unsigned r);
char *itoa(int i, char *a, int r);
static char *i2a(unsigned i, char *a, unsigned r)
{
if (i/r > 0) a = i2a(i/r,a,r);
*a = "0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ"[i%r];
return a+1;
}
char *itoa(int i, char *a, int r)
{
if ((r < 2) || (r > 36)) r = 10;
if (i < 0)
{
*a = '-';
*i2a(-(unsigned)i,a+1,r) = 0;
}
else *i2a(i,a,r) = 0;
return a;
}
void TX(char *tx_message)
{
unsigned int i=0; //Define end of string loop int
char *message; // message variable
unsigned int message_num; // define ascii int version variable
message = tx_message; // move tx_message into message
while(1)
{
if(message[i]==0) // If end of input string is reached, break loop.
{break;}
message_num = (int)message[i]; //Cast string char into a int variable
UCA0TXBUF = message_num; // write INT to TX buffer
i++; // increase string index
__delay_cycles(10000); //transmission delay
Nguyáŧ
n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM
Email: loc.plsoft@gmail.com](https://image.slidesharecdn.com/dokhoangcachbangkitlaunchpadsrf05-121120021053-phpapp01/85/Do-kho-ng-cach-b-ng-kit-launchpad-srf05-4-320.jpg)





Äo khoášĢng cÃĄch bášąng kit launchpad + srf05
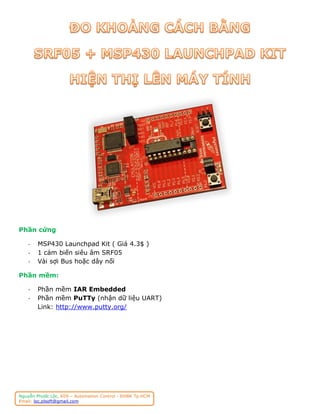
- 1. Phᚧn cáŧĐng - MSP430 Launchpad Kit ( GiÃĄ 4.3$ ) - 1 cášĢm biášŋn siÊu ÃĒm SRF05 - Và i sáŧĢi Bus hoáš·c dÃĒy náŧi Phᚧn máŧm: - Phᚧn máŧm IAR Embedded - Phᚧn máŧm PuTTy (nhášn dáŧŊ liáŧu UART) Link: http://www.putty.org/ Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 2. Viášŋt chÆ°ÆĄng trÃŽnh cho KIT launchpad Máŧ IAR Embedded Workbench và là m theo cÃĄc bÆ°áŧc sau: Äáš·t tÊn Project âĶ Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 3. CÃ i Äáš·t cÃĄc thÃīng sáŧ sau: Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 4. Viášŋt chÆ°ÆĄng trÃŽnh cho âmain.câ nhÆ° sau: #include <msp430g2553.h> #include <stdbool.h> ////////////////Defines//////////////// #define LED1 BIT6 #define LED0 BIT0 #define DAT BIT0 //P2.0 //input signal port #define VCC BIT5 //P1.5 #define GND BIT4 //P1.4 #define KICH BIT1 char charbuffer[8]; int i=0; int j=0; unsigned int capture_array[51]; // RAM array for captures int tick=0; int cap=0; int pre_cap=0; int first_pulse=0; ////////////////Function Protos//////////////// void TX(char *tx_message); void DO_KHOANG_CACH(void); static char *i2a(unsigned i, char *a, unsigned r); char *itoa(int i, char *a, int r); static char *i2a(unsigned i, char *a, unsigned r) { if (i/r > 0) a = i2a(i/r,a,r); *a = "0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ"[i%r]; return a+1; } char *itoa(int i, char *a, int r) { if ((r < 2) || (r > 36)) r = 10; if (i < 0) { *a = '-'; *i2a(-(unsigned)i,a+1,r) = 0; } else *i2a(i,a,r) = 0; return a; } void TX(char *tx_message) { unsigned int i=0; //Define end of string loop int char *message; // message variable unsigned int message_num; // define ascii int version variable message = tx_message; // move tx_message into message while(1) { if(message[i]==0) // If end of input string is reached, break loop. {break;} message_num = (int)message[i]; //Cast string char into a int variable UCA0TXBUF = message_num; // write INT to TX buffer i++; // increase string index __delay_cycles(10000); //transmission delay Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 5. if(i>50) //prevent infinite transmit { // P1OUT |= (LED1+LED0); break; } } // End TX Main While Loop } // End TX Function int main(void) { WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer //setup clock to 1MHZ BCSCTL1 = CALBC1_1MHZ; // Set DCO to 1MHz DCOCTL = CALDCO_1MHZ; ////////////////USCI setup//////////////// P1SEL = BIT1 + BIT2; // Set P1.1 to RXD and P1.2 to TXD P1SEL2 = BIT1 + BIT2; // UCA0CTL1 |= UCSSEL_2; // Have USCI use SMCLK AKA 1MHz main CLK UCA0BR0 = 104; // Baud: 9600, N= CLK/Baud, N= 10^6 / 9600 UCA0BR1 = 0; // Set upper half of baud select to 0 UCA0MCTL = UCBRS_1; // Modulation UCBRSx = 1 UCA0CTL1 &= ~UCSWRST; // Start USCI ////////////////General GPIO Defines//////////////// P1DIR |= (LED0 + LED1+GND+VCC); //define output ports P1OUT &= ~(LED0 + LED1+GND); //turn ports low P2DIR |= KICH; P2IE |= DAT; P2IFG &= ~DAT; P2SEL = DAT; // Set P2.0 to TA0 /////////////////SETUP TIMER TA1CCTL0 = CM_3 + SCS + CCIS_0 + CAP + CCIE; // falling edge + CCI0A (P2.0)// + Capture Mode + Interrupt TA1CTL = TASSEL_2 + MC_2; // SMCLK + Continuous Mode __enable_interrupt(); while(1) { __delay_cycles(100000); DO_KHOANG_CACH(); } } // Timer1 interrupt service routine #pragma vector=TIMER1_A0_VECTOR __interrupt void TIMER1(void) { if ( (first_pulse==0) & (DAT == 1) ) { P1OUT |= LED1; pre_cap=TA1CCR0; first_pulse=1; } else { P1OUT &= ~LED1; tick = TA1CCR0; cap = (tick- pre_cap)/58; Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 6. first_pulse =0; TA1CCR0=0; itoa(cap, charbuffer, 10); TX(charbuffer); TX("rn"); } } void DO_KHOANG_CACH(void) { P2OUT |= KICH; __delay_cycles(20); P2OUT &= ~KICH; } Sau khi hoà n tášĨt thÃŽ Download chÆ°ÆĄng trÃŽnh xuáŧng KIT Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 7. Kášŋt náŧi váŧi SRF05 ChÚ Ã―: Äáŧi sang mode Hardware Uart bášąng cÃĄch thay Äáŧi cÃĄc Switch kášŋt náŧi nhÆ° hÃŽnh khoanh mà u và ng. Máŧ chÆ°ÆĄng trÃŽnh PUTTY ( hi váŧng bᚥn sáš― hiáŧu hÃŽnh sau nÃģi gÃŽ ) hi Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 8. Kášŋt quášĢ Äo: GiášĢi thÃch sÆĄ lÆ°áŧĢc váŧ chÆ°ÆĄng trÃŽnh. ChÆ°ÆĄng trÃŽnh sáŧ dáŧĨng Timer1 áŧ chášŋ Äáŧ Capture Äáŧ bášŊt xung táŧŦ chÃĒn P2.0. CáŧĐ máŧi 100ms chÆ°ÆĄng trÃŽnh sáš― phÃĄt xung (20us) ra chÃĒn P1.1 Äáŧ kÃch cho SRF05 hoᚥt Äáŧng. SRF05 trášĢ váŧ giÃĄ tráŧ Äo ÄÆ°áŧĢc áŧ chÃĒn P2.0. GiÃĄ tráŧ Äo ÄÆ°áŧĢc sáš― ÄÆ°áŧĢc chia cho 58 Äáŧ ra khoášĢng cÃĄch tÃnh bášąng centimet. Sau ÄÃģ giÃĄ tráŧ ÄÆ°áŧĢc gáŧi lÊn mÃĄy tÃnh. Máŧi viáŧc ÄÃĢ xong ráŧi ÄÃģ. Good luck to you ! Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com
- 9. Và ÄÃĒy là kášŋt quášĢ: Nguyáŧ n PhÆ°áŧc Láŧc, K09 â Automation Control - ÄHBK Tp.HCM Email: loc.plsoft@gmail.com