Energy based models and boltzmann machines - v2.0
ŌĆó
8 likesŌĆó2,050 views

This is version 2.0 of my previous slides. (http://www.slideshare.net/blaswan/energy-based-models-and-boltzmann-machines) Removed very simple recommendation example and Added feature extractor example referenced from Hinton's lecture.














![Contrastive Divergence
CD-k with Alternative Gibbs Sampling [Hinton 02]
ŌŚÅ Gibbs SamplingņØś ņŗ£ņ×æņØä ņ×äņØśņØś Ļ░ÆņØ┤ ņĢäļŗłļØ╝ training dataļĪ£ ĒĢ£ļŗż.
ŌŚÅ Gibbs SamplingņØä ļ¼┤ĒĢ£ļ▓ł ĒĢśņ¦Ć ņĢŖĻ│Ā kļ▓łļ¦ī ĒĢ£ļŗż.
ŌŚÅ ņŗżņ¦łņĀüņ£╝ļĪ£ļŖö 1ļ▓łļ¦ī ĒĢ┤ļÅä ņČ®ļČäĒ׳ ņóŗņØĆ ņāśĒöīņØä ņ¢╗ņØä ņłś ņ׳ļŗż.
ŌŚŗ TrainingņØä ĒĢĀņłśļĪØ ļ¬©ļŹĖņØ┤ Ļ░Ćņ¦ĆļŖö ļČäĒżļŖö training setņØś ļČäĒżļź╝ ļö░ļØ╝Ļ░äļŗż. ņ”ē,
training dataĻ░Ć ņØ┤ļ»Ė ļ¬©ļŹĖņØś ļČäĒżļź╝ ņ¢┤ļŖÉ ņĀĢļÅä Ēæ£ĒśäĒĢśĻ│Ā ņ׳ļŗżļŖö Ļ▓āņØ┤ļŗż. ļö░ļØ╝ņä£
training dataļĪ£ļČĆĒä░ ņāśĒöīļ¦üņØä ņŗ£ņ×æĒĢśļ®┤ ņØ┤ļ»Ė ņ¢┤ļŖÉ ņĀĢļÅä ņłśļĀ┤ļÉ£ ņ¦ĆņĀÉļČĆĒä░ ņāśĒöīļ¦ü
ņØä ņŗ£ņ×æĒĢśļŖö Ļ▓āņØ┤ļØ╝Ļ│Ā ļ│╝ ņłś ņ׳ņ¢┤ņä£ 1ļ▓łļ¦īņŚÉ ņóŗņØĆ ņāśĒöīņØä ņ¢╗ņØä ņłś ņ׳ļŗż.
ŌŚÅ 1ļ▓ł ņāśĒöīļ¦üĒĢ┤ņä£ ņ¢╗ņ¢┤ņ¦ä visible dataļź╝ reconstrunctionņØ┤ļØ╝Ļ│Ā ĒĢśĻ│Ā ĒŖĖļĀłņØ┤ļŗØ
ņØ┤ ņĀ£ļīĆļĪ£ ļÉśĻ│Ā ņ׳ļŗżļ®┤ reconstruction errorĻ░Ć Ļ░ÉņåīĒĢ£ļŗż. ņ”ē, ņØ┤ņāüņĀüņØĖ RBM
ņØĆ input dataļź╝ ņ¦æņ¢┤ļäŻņ£╝ļ®┤ ļÅÖņØ╝ĒĢ£ reconstruction visible dataļź╝ ņ¢╗ņØä ņłś ņ׳
ļŗż.](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-21-320.jpg)
![Contrastive Divergence
persistent CD [Tieleman 08]
ŌŚÅ Gibbs SamplingņØä ĒĢĀ ļĢī ĻĖ░ņĪ┤ CD-k ņŚÉņä£ļŖö ļ¦żļ▓ł Ļ░üĻ░üņØś training dataņŚÉ ļīĆ
ĒĢ┤ ņāśĒöīļ¦üĒĢśņ¦Ćļ¦ī persistent CDņŚÉņä£ļŖö ņØ┤ņĀä Gibbs SamplingņŚÉņä£ Ļ│äņé░ļÉ£
data (reconstruction data)ļź╝ ļŗżņØī ļ▓ł SamplingņØś ņŗ£ņ×æņ£╝ļĪ£ ņé¼ņÜ®ĒĢ£ļŗż. ņ”ē, ņ▓½
ļ▓łņ¦Ė training dataĻ░Ć persistent chainņØś ņŗ£ņ×æņØ┤ ļÉśĻ│Ā ņĀäļ▓łņØś Gibbs Sampling
Ļ▓░Ļ│╝ļź╝ ļŗżņØī ļ▓ł trainingņØś ņŗ£ņ×æņ£╝ļĪ£ ņé¼ņÜ®ĒĢśņŚ¼ ChainņØä ņØ┤ņ¢┤ļéśĻ░äļŗż.
ŌŚŗ ņØ┤ļĀćĻ▓ī ChainņØä ņØ┤ņ¢┤ ļéśĻ░Ćļ®┤ ļ¼┤ĒĢ£ļ▓ł SamplingĒĢśļŖö Ļ▓āĻ│╝ ļ╣äņŖĘĒĢ┤ņ¦ĆļŖö ĒÜ©Ļ│╝ļź╝ Ļ░¢Ļ▓ī
ļÉ£ļŗż. ļ¼╝ļĪĀ ļ¦ż Gibbs Samplingļ¦łļŗż ĒīīļØ╝ļ»ĖĒä░Ļ░Ć Update ļÉśņ¢┤ņä£ ļ¬©ļŹĖņØ┤ ļ│ĆĒĢśĻĖ┤ ĒĢś
ņ¦Ćļ¦ī ļ¦żņÜ░ ņ×æņØĆ Ļ░ÆņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ĻĘ╝ņé¼ņĀüņ£╝ļĪ£ ņä▒ļ”ĮĒĢ£ļŗż.](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-22-320.jpg)
![Examples [HintonŌĆÖs lecture]
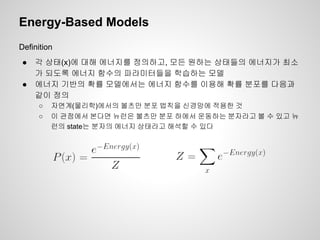
ņł½ņ×É 2ļź╝ ĒĢÖņŖĄĒĢśļŖö ņśłņĀ£
ŌŚÅ 16 x 16 Ēü¼ĻĖ░ņØś ņØ┤ļ»Ėņ¦Ć (256 Ļ░£ņØś visible ļē┤ļ¤░)
ŌŚÅ 50Ļ░£ņØś binary hidden ļē┤ļ¤░
ŌŚŗ ņØ┤ Ļ▓ĮņÜ░ Hidden unit = Feature detector = Feature Extractor
ŌŚÅ CD-1ņ£╝ļĪ£ ĒĢÖņŖĄ
ŌŚÅ Ļ░ü ļē┤ļ¤░ņØś WeightļŖö ļ×£ļŹżĻ░Æņ£╝ļĪ£ ņ┤łĻĖ░ĒÖö](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-23-320.jpg)
![Examples [HintonŌĆÖs lecture]
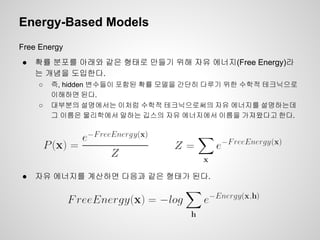
50Ļ░£ņØś Hidden UnitņØś Weightļź╝ ņØ┤ļ»Ėņ¦ĆļĪ£ ĻĘĖļ”░ Ļ▓ā](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-24-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-25-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-26-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-27-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-28-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-29-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-30-320.jpg)
![Examples [HintonŌĆÖs lecture]](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-31-320.jpg)
![Examples [HintonŌĆÖs lecture]
Ļ░ü ļē┤ļ¤░ņØ┤ ņł½ņ×É 2ņØś ņä£ļĪ£ ļŗżļźĖ Featureļź╝ ņ×ĪņĢäļé┤ļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ņØī](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-32-320.jpg)
![Examples [HintonŌĆÖs lecture]
ĒģīņŖżĒŖĖ ņØ┤ļ»Ėņ¦ĆļĪ£ ReconstructionņØä ĒĢ┤ļ│┤ļ®┤..
ĒģīņŖżĒŖĖņÜ® ņØ┤ļ»Ėņ¦Ć Reconstruction ĒģīņŖżĒŖĖņÜ® ņØ┤ļ»Ėņ¦Ć Reconstruction
ŌŚÅ ņØ┤ ļäżĒŖĖņøīĒü¼ļŖö ņł½ņ×É 2ņŚÉ ļīĆĒĢ┤ņä£ļ¦ī ĒøłļĀ©ļÉśņ¢┤ ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ļ¬©ļōĀ ņØ┤ļ»Ėņ¦Ćļź╝ ņł½
ņ×É 2ļĪ£ ņØ┤ĒĢ┤ĒĢśļĀżĻ│Ā ĒĢ£ļŗż.](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-33-320.jpg)
![Examples [Larochelle 09]
MNIST](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-34-320.jpg)
![Examples [Larochelle 09]
MNIST
ŌŚÅ Ļ░ü Hidden unitņØ┤ Edge(ĒÄ£ņŖżĒŖĖļĪ£Ēü¼)ļź╝ ļĮæņĢäļé┤ļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ņØī.](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-35-320.jpg)
![Extensions
Unsupervised Learning
ŌŚÅ Feature Extractor
ŌŚÅ ļŗżļźĖ Supervised LearningņØś pre-training
ŌŚŗ Deep Belief Network [Hinton Neural Computation 06]
ŌŚŗ Deep Auto-Encoder [Hinton Science 06]
ŌŚÅ Collaborative Filtering (Netflix Prize 2007 winner) [Salakhutdinov 07]
ŌŚŗ Conditional RBM (with Gaussian Unit)
ŌŚŗ Conditional Factored RBM
ŌŚÅ Generator (Human motion modeling) [Taylor 06]
ŌŚŗ Conditional RBM](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-36-320.jpg)
![Extensions
Supervised Learning
ŌŚÅ Classifier [Larochelle 08]
ŌŚŗ Classification RBM
ŌŚŗ Discriminitive RBM
ŌŚŗ Hybrid Discriminitive RBM](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-37-320.jpg)
![References
ŌŚÅ [Bengio 09] Learning Deep Architectures for AI
ŌŚÅ [Deeplearning.net] Deep learning tutorial - RBM
ŌŚÅ [Hinton 02] Training Products of Experts by Minimizing Contrastive Divergence
ŌŚÅ [Tieleman 08] Training Restricted Boltzmann Machines using Approximations to the
Likelihood Gradient
ŌŚÅ [Larochelle 09] Exploring Strategies for Training Deep Neural Networks
ŌŚÅ [Hinton Neural Computation 06] A Fast Learning Algorithm for Deep Belief Network
ŌŚÅ [Hinton Science 06] Reducing the Dimensionality of Data with Neural Networks
ŌŚÅ [Salakhutdinov 07] Restricted Boltzmann machines for collaborative filtering
ŌŚÅ [Taylor 06] Modeling Human Motion Using Binary Latent Variables
ŌŚÅ [Larochelle 08] Classification using Discriminative Restricted Boltzmann Machines](https://image.slidesharecdn.com/energy-basedmodelsandboltzmannmachines-v2-140923021902-phpapp02/85/Energy-based-models-and-boltzmann-machines-v2-0-38-320.jpg)

Energy based models and boltzmann machines - v2.0
- 1. Energy-Based Models and Boltzmann Machines Learning Deep Architectures for AI - Ch 5
- 2. ļ¬®ņ░© ŌŚÅ Energy-Based Models ŌŚÅ Boltzmann Machines ŌŚÅ Restricted Boltzmann Machines ŌŚÅ Contrastive Divergence ŌŚÅ Examples
- 3. Energy-Based Models Definition ŌŚÅ Ļ░ü ņāüĒā£(x)ņŚÉ ļīĆĒĢ┤ ņŚÉļäłņ¦Ćļź╝ ņĀĢņØśĒĢśĻ│Ā, ļ¬©ļōĀ ņøÉĒĢśļŖö ņāüĒā£ļōżņØś ņŚÉļäłņ¦ĆĻ░Ć ņĄ£ņåī Ļ░Ć ļÉśļÅäļĪØ ņŚÉļäłņ¦Ć ĒĢ©ņłśņØś ĒīīļØ╝ļ»ĖĒä░ļōżņØä ĒĢÖņŖĄĒĢśļŖö ļ¬©ļŹĖ ŌŚÅ ņŚÉļäłņ¦Ć ĻĖ░ļ░śņØś ĒÖĢļźĀ ļ¬©ļŹĖņŚÉņä£ļŖö ņŚÉļäłņ¦Ć ĒĢ©ņłśļź╝ ņØ┤ņÜ®ĒĢ┤ ĒÖĢļźĀ ļČäĒżļź╝ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢņØś ŌŚŗ ņ×ÉņŚ░Ļ│ä(ļ¼╝ļ”¼ĒĢÖ)ņŚÉņä£ņØś ļ│╝ņĖĀļ¦ī ļČäĒż ļ▓Ģņ╣ÖņØä ņŗĀĻ▓Įļ¦ØņŚÉ ņĀüņÜ®ĒĢ£ Ļ▓ā ŌŚŗ ņØ┤ Ļ┤ĆņĀÉņŚÉņä£ ļ│Ėļŗżļ®┤ ļē┤ļ¤░ņØĆ ļ│╝ņĖĀļ¦ī ļČäĒż ĒĢśņŚÉņä£ ņÜ┤ļÅÖĒĢśļŖö ļČäņ×ÉļØ╝Ļ│Ā ļ│╝ ņłś ņ׳Ļ│Ā ļē┤ ļ¤░ņØś stateļŖö ļČäņ×ÉņØś ņŚÉļäłņ¦Ć ņāüĒā£ļØ╝Ļ│Ā ĒĢ┤ņäØĒĢĀ ņłś ņ׳ļŗż
- 4. Energy-Based Models Introducing Hidden Variables ŌŚÅ ļ¬©ļŹĖņØś Ēæ£ĒśäļĀź(expressive power)ņØä ņ”ØĻ░Ćņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ Ļ┤ĆņĖĪļÉśņ¦Ć ņĢŖļŖö (non-observed) ļ│ĆņłśļōżņØä ņČöĻ░ĆĒĢśļ®┤ ĒÖĢļźĀ ļČäĒżļź╝ ņĢäļלņÖĆ Ļ░ÖņØ┤ ņōĖ ņłś ņ׳ņØī
- 5. Energy-Based Models Free Energy ŌŚÅ ĒÖĢļźĀ ļČäĒżļź╝ ņĢäļלņÖĆ Ļ░ÖņØĆ ĒśĢĒā£ļĪ£ ļ¦īļōżĻĖ░ ņ£äĒĢ┤ ņ×Éņ£Ā ņŚÉļäłņ¦Ć(Free Energy)ļØ╝ ļŖö Ļ░£ļģÉņØä ļÅäņ×ģĒĢ£ļŗż. ŌŚŗ ņ”ē, hidden ļ│ĆņłśļōżņØ┤ ĒżĒĢ©ļÉ£ ĒÖĢļźĀ ļ¬©ļŹĖņØä Ļ░äļŗ©Ē׳ ļŗżļŻ©ĻĖ░ ņ£äĒĢ£ ņłśĒĢÖņĀü ĒģīĒü¼ļŗēņ£╝ļĪ£ ņØ┤ĒĢ┤ĒĢśļ®┤ ļÉ£ļŗż. ŌŚŗ ļīĆļČĆļČäņØś ņäżļ¬ģņŚÉņä£ļŖö ņØ┤ņ▓śļ¤╝ ņłśĒĢÖņĀü ĒģīĒü¼ļŗēņ£╝ļĪ£ņŹ©ņØś ņ×Éņ£Ā ņŚÉļäłņ¦Ćļź╝ ņäżļ¬ģĒĢśļŖöļŹ░ ĻĘĖ ņØ┤ļ”äņØĆ ļ¼╝ļ”¼ĒĢÖņŚÉņä£ ļ¦ÉĒĢśļŖö Ļ╣üņŖżņØś ņ×Éņ£Ā ņŚÉļäłņ¦ĆņŚÉņä£ ņØ┤ļ”äņØä Ļ░ĆņĀĖņÖöļŗżĻ│Ā ĒĢ£ļŗż. ŌŚÅ ņ×Éņ£Ā ņŚÉļäłņ¦Ćļź╝ Ļ│äņé░ĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░ÖņØĆ ĒśĢĒā£Ļ░Ć ļÉ£ļŗż.
- 6. Energy-Based Models Log-likelihood gradient ŌŚÅ EBMņØĆ ļŹ░ņØ┤Ēä░ņØś log-likelihoodļź╝ ņØ┤ņÜ®ĒĢ┤ņä£ gradient descent ļ░®ļ▓Ģņ£╝ļĪ£ ĒĢÖņŖĄ Ļ░ĆļŖźĒĢśļŗż. ŌŚÅ Log-likelihoodļź╝ Ļ│äņé░ĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż. (Ļ│äņé░ ņāØļץ) ŌŚŗ ņ▓½ļ▓łņ¦Ė ĒĢŁņØĆ input vector(x)Ļ░Ć ņŻ╝ņ¢┤ņĪīņØä ļĢī ņēĮĻ▓ī ĻĄ¼ĒĢĀ ņłś ņ׳ņ¦Ćļ¦ī ļæÉļ▓łņ¦Ė ĒĢŁņØĆ ļ¬©ļōĀ Ļ░ĆļŖźĒĢ£ inputņŚÉ ļīĆĒĢ┤ Ļ│äņé░ĒĢ┤ņĢ╝ ĒĢśļ»ĆļĪ£ ņĀĢĒÖĢĒĢśĻ▓ī Ļ│äņé░ĒĢśļŖö Ļ▓āņØĆ ņŗ£Ļ░äņØ┤ ļ¦żņÜ░ ņśżļל Ļ▒Ėļ”░ļŗż.
- 7. Energy-Based Models Average log-likelihood gradient ŌŚÅ ņĢ×ņä£ ĻĄ¼ĒĢ£ Log-likelihoodņØś Averageļź╝ ĻĄ¼ĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż. (ņØ┤ ļģ╝ļ¼ĖņŚÉņä£ņØś Ēæ£Ēśä) ŌŚŗ ^P ļŖö traing setņŚÉ ņØśĒĢ┤ Ļ▓ĮĒŚśņĀüņ£╝ļĪ£ Ļ▓░ņĀĢļÉśļŖö ļČäĒż(empirical distribution)ļź╝ ņØśļ»Ė ĒĢ£ļŗż. ŌŚŗ PļŖö ļ¬©ļŹĖ ņ×Éņ▓┤ņØś ļČäĒżļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŚÉļäłņ¦ĆņØś Ļ┤ĆņĀÉņŚÉņä£ ļ│Ėļŗżļ®┤ ļ¬©ļŹĖņØ┤ ņŚÉļäłņ¦Ć ĒÅē ĒśĢ ņāüĒā£ņŚÉ ņ׳ņØä ļĢīņØś ļČäĒżļØ╝Ļ│Ā ĒĢ┤ņäØĒĢĀ ņłś ņ׳ņØī. ŌŚÅ ļ¦ÄņØĆ ļģ╝ļ¼ĖĻ│╝ ĒŖ£ĒåĀļ”¼ņ¢╝ņŚÉņä£ļŖö ņ£ä ņŗØņØä ņĢīņĢäļ│┤ĻĖ░ ņēĮĻ▓ī ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ēæ£ĒśäĒĢ£ļŗż.
- 8. Energy-Based Models The idea of stochastic estimator of the log-likelihood gradient ŌŚÅ EBMņØś ĒĢÖņŖĄņØä ņ£äĒĢ┤ņä£ļŖö ņ£ä ņŗØņØś ļæÉ ļ▓łņ¦Ė ĒĢŁņØä ļ╣Āļź┤Ļ▓ī Ļ│äņé░ĒĢ┤ņĢ╝ ĒĢ£ļŗż. ŌŚÅ ļ¦īņĢĮ ļ¬©ļŹĖņØś ļČäĒż PļĪ£ļČĆĒä░ ņāśĒöīļ¦üņØä ĒĢ┤ņä£ ņ×Éņ£Ā ņŚÉļäłņ¦Ćļź╝ ļ╣Āļź┤Ļ▓ī (tractably) Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗżļ®┤ Monte-Carlo ļ░®ļ▓ĢņØä ņé¼ņÜ®ĒĢ┤ņä£ gradient Ļ░ÆņØä ņČöņĀĢĒĢĀ ņłś ņ׳ ļŗż.
- 9. Energy-Based Models Approach overview ŌŚÅ ļ¬©ļŹĖņŚÉ ļ¦×ļŖö ņŚÉļäłņ¦Ć ĒĢ©ņłś ņĀĢņØś ŌŚÅ ņ×Éņ£Ā ņŚÉļäłņ¦Ć ņĀĢņØś ŌŚÅ ņŚÉļäłņ¦Ć ĒĢ©ņłśļĪ£ļČĆĒä░ ĒÖĢļźĀ ļČäĒż ņĀäĻ░£ ŌŚÅ Log-likelihood gradient ņĀäĻ░£ ŌŚÅ MCMC methodļź╝ ņØ┤ņÜ®ĒĢ┤ ļ¬©ļŹĖņØś ĻĖ░ļīĆĻ░ÆņØä Ļ│äņé░ĒĢśĻ│Ā Ļ▓░Ļ│╝ņĀüņ£╝ļĪ£ gradient ņČöņĀĢ
- 10. Boltzmann Machines Definition ŌŚÅ Boltzmann Machine ņØĆ hidden unitņØä ņČöĻ░ĆĒĢ£ EBMņØś ņØ╝ņóģņØ┤ļŗż. ļśÉ MRF (Markov Random Field, Markov Network)ņØś ņØ╝ņóģņØ┤ĻĖ░ļÅä ĒĢśļŗż. ŌŚÅ UnitļōżĻ░äņØś ņŚ░Ļ▓░ņŚÉ ņĀ£ņĢĮņØ┤ ņŚåņØ┤ ļ¬©ļæÉ ņŚ░Ļ▓░ļÉĀ ņłś ņ׳ļŖö ļ¬©ļŹĖņØ┤ļŗż.
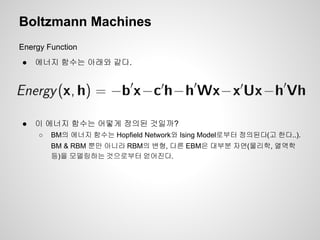
- 11. Boltzmann Machines Energy Function ŌŚÅ ņŚÉļäłņ¦Ć ĒĢ©ņłśļŖö ņĢäļלņÖĆ Ļ░Öļŗż. ŌŚÅ ņØ┤ ņŚÉļäłņ¦Ć ĒĢ©ņłśļŖö ņ¢┤ļ¢╗Ļ▓ī ņĀĢņØśļÉ£ Ļ▓āņØ╝Ļ╣ī? ŌŚŗ BMņØś ņŚÉļäłņ¦Ć ĒĢ©ņłśļŖö Hopfield NetworkņÖĆ Ising ModelļĪ£ļČĆĒä░ ņĀĢņØśļÉ£ļŗż(Ļ│Ā ĒĢ£ļŗż..). BM & RBM ļ┐Éļ¦ī ņĢäļŗłļØ╝ RBMņØś ļ│ĆĒśĢ, ļŗżļźĖ EBMņØĆ ļīĆļČĆļČä ņ×ÉņŚ░(ļ¼╝ļ”¼ĒĢÖ, ņŚ┤ņŚŁĒĢÖ ļō▒)ņØä ļ¬©ļŹĖļ¦üĒĢśļŖö Ļ▓āņ£╝ļĪ£ļČĆĒä░ ņ¢╗ņ¢┤ņ¦äļŗż.
- 12. Boltzmann Machines Problems ŌŚÅ ļ¬©ļŹĖņØ┤ ļīĆņ╣ŁņĀüņØ┤Ļ│Ā ņ£ĀļŗøņØ┤ Binary UnitņØ┤ļØ╝ļŖö Ļ░ĆņĀĢ ĒĢśņŚÉ EBMņŚÉņä£ Ē¢łļŹś ļģ╝ ņØśļź╝ ĻĘĖļīĆļĪ£ ņØ┤ņ¢┤ļéśĻ░ł ņłś ņ׳ļŗż. ŌŚÅ ņ”ē, ņŚÉļäłņ¦ĆļĪ£ļČĆĒä░ ĒÖĢļźĀņØä ĻĄ¼ĒĢśĻ│Ā Log-likelihood gradientļź╝ Ļ│äņé░ĒĢ£ ļŗżņØī MCMC SamplingņØä ĒåĄĒĢ┤ stochastic ĒĢśĻ▓ī gradientļź╝ ņČöņĀĢĒĢĀ ņłś ņ׳ļŗż. ŌŚŗ ļÆżņŚÉ RBMņŚÉņä£ ņ×ÉņäĖĒ׳ ļŗżļŻ░ Ļ▓āņØ┤ļŗż. ŌŚÅ ĒĢśņ¦Ćļ¦ī StochasticĒĢśĻ▓ī gradientļź╝ ņČöņĀĢĒĢ£ļŗżĻ│Ā ĒĢ┤ļÅä ļäłļ¼┤ ļ¦ÄņØĆ (ņĀ£ņĢĮņØ┤ ņŚåļŖö) ņŚ░Ļ▓░ļĢīļ¼ĖņŚÉ ņØ╝ļ░śņĀüņ£╝ļĪ£ Ļ│äņé░ņØ┤ ļ╣äņŗĖĻ│Ā ņśżļל Ļ▒Ėļ”░ļŗż. ŌŚŗ ņŚÉļäłņ¦Ć ĒÅēĒśĢ ņāüĒā£ņØś Ēæ£ļ│ĖņØä ņłśņ¦æĒĢśļŖö ņŗ£Ļ░äņØ┤ ļ¬©ļŹĖņØś ņé¼ņØ┤ņ”ł, ņŚ░Ļ▓░ Ļ░ĢļÅäņØś Ēü¼ĻĖ░ņŚÉ ļīĆĒĢ┤ ņ¦ĆņłśņĀüņ£╝ļĪ£ ņ”ØĻ░ĆĒĢ£ļŗż.
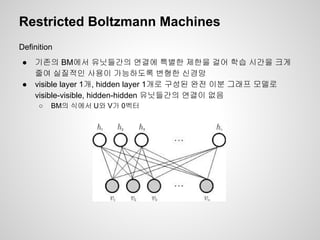
- 13. Restricted Boltzmann Machines Definition ŌŚÅ ĻĖ░ņĪ┤ņØś BMņŚÉņä£ ņ£ĀļŗøļōżĻ░äņØś ņŚ░Ļ▓░ņŚÉ ĒŖ╣ļ│äĒĢ£ ņĀ£ĒĢ£ņØä Ļ▒Ėņ¢┤ ĒĢÖņŖĄ ņŗ£Ļ░äņØä Ēü¼Ļ▓ī ņżäņŚ¼ ņŗżņ¦łņĀüņØĖ ņé¼ņÜ®ņØ┤ Ļ░ĆļŖźĒĢśļÅäļĪØ ļ│ĆĒśĢĒĢ£ ņŗĀĻ▓Įļ¦Ø ŌŚÅ visible layer 1Ļ░£, hidden layer 1Ļ░£ļĪ£ ĻĄ¼ņä▒ļÉ£ ņÖäņĀä ņØ┤ļČä ĻĘĖļלĒöä ļ¬©ļŹĖļĪ£ visible-visible, hidden-hidden ņ£ĀļŗøļōżĻ░äņØś ņŚ░Ļ▓░ņØ┤ ņŚåņØī ŌŚŗ BMņØś ņŗØņŚÉņä£ UņÖĆ VĻ░Ć 0ļ▓ĪĒä░
- 14. Restricted Boltzmann Machines Energy, Free Energy ŌŚÅ RBMņŚÉņä£ļŖö ņŚÉļäłņ¦ĆĻ░Ć ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢņØśļÉ£ļŗż. ŌŚÅ RBMļÅä EBMņØś ņØ╝ņóģņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ FreeEnergyņÖĆ DistributionņØĆ ĻĘĖļīĆļĪ£ ļö░ļØ╝ Ļ░äļŗż. ŌŚŗ ņŚ¼ņĀäĒ׳ Partition function ZļŖö intractableĒĢśļŗż.
- 15. Restricted Boltzmann Machines Conditional Distribution ŌŚÅ RBMņØś ĻĄ¼ņĪ░ņŚÉ ņØśĒĢ┤ inputņØ┤ ņŻ╝ņ¢┤ņ¦Ćļ®┤ hidden unitļōż Ļ░äņŚÉļŖö conditionally independentĒĢśļ®░ ĻĘĖ ņŚŁļÅä ļÅÖņØ╝ĒĢśĻ▓ī ņä▒ļ”Į ŌŚŗ ņØ┤ ņåŹņä▒ņØ┤ Ļ│äņé░ ņŗ£Ļ░äņØä Ēü¼Ļ▓ī ņżäņŚ¼ņŻ╝ļŖö ņØ┤ņ£ĀĻ░Ć ļÉ©
- 16. Restricted Boltzmann Machines RBMs with Binary units ŌŚÅ Binary unitņØ┤ļØ╝Ļ│Ā Ļ░ĆņĀĢĒĢśļ®┤ P(h|x) ņŗØņØä ņĀäĻ░£ĒĢśĻ│Ā conditionally independent ĒĢśļŗżļŖö ņåŹņä▒ņØä ņØ┤ņÜ®ĒĢ┤ P(h_i = 1|x) ņØä ņ¢╗ņØä ņłś ņ׳ņØī. ĻĘĖ ņŚŁļÅä ļ¦łņ░¼Ļ░Ćņ¦Ć. (Ļ│äņé░ ņāØļץ) ŌŚŗ ņØ┤ ļæÉ ņŗØņØĆ ļÆżņŚÉņä£ SamplingņØä ĒĢĀ ļĢīņØś update ruleņØ┤ ļÉ£ļŗż. ŌŚŗ Ļ░ü unitņØ┤ 0Ļ│╝ 1 ņé¼ņØ┤ņØś ņŗżņłśĻ░ÆņØĖ Ļ▓ĮņÜ░ļĪ£ ĒÖĢņןĒĢ£ Ļ▓āņØ┤ Gaussian-Bernoulli RBM (GBRBM) ņØ┤ļŗż.
- 17. Restricted Boltzmann Machines Negative Log-likelihood gradient ŌŚÅ ĒĢÖņŖĄņØä ņ£äĒĢ┤ Negative Log-likelihood gradientļź╝ Ļ│äņé░ĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż. ŌŚÅ ņ▓½ļ▓łņ¦Ė ĒĢŁņØä positive phase, ļæÉļ▓łņ¦Ė ĒĢŁņØä negative phaseļØ╝Ļ│Ā ĒĢ£ļŗż.ņĢ×ņä£ ļģ╝ ņØśņÖĆ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ negative phaseļŖö Ļ│äņé░ĒĢśĻĖ░ ņ¢┤ļĀĄļŗż. ŌŚŗ RBMņŚÉņä£ļŖö SamplingņØä ĒåĄĒĢ┤ Ļ░ÆņØä ņČöņĀĢĒĢ£ļŗż.
- 18. Restricted Boltzmann Machines Update Equations with Binary Units ŌŚÅ RBMņØś ņŚÉļäłņ¦Ć ĒĢ©ņłśļĪ£ļČĆĒä░ Ļ░ü ĒīīļØ╝ļ»ĖĒä░ņŚÉ ļīĆĒĢ£ ĒÄĖļ»ĖļČäņØä Ļ│äņé░ĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż. ŌŚŗ ņŚÉļäłņ¦Ć ĒĢ©ņłśĻ░Ć ņäĀĒśĢņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ļ»ĖļČäĻ░ÆņØ┤ ļ¦żņÜ░ Ļ░äļŗ©ĒĢ┤ņ¦äļŗż. ŌŚÅ RBMņØś ņĄ£ņóģņĀüņØĖ Update EquationņØä ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņ¢╗ņØä ņłś ņ׳ļŗż.
- 19. Restricted Boltzmann Machines Gibbs Sampling in RBMs ŌŚÅ ļæÉ ĒÖĢļźĀ ļ│ĆņłśņØś ņĪ░Ļ▒┤ļČĆ ĒÖĢļźĀ ļČäĒżĻ░Ć ņŻ╝ņ¢┤ņĪīņ£╝ļ»ĆļĪ£ Gibbs SamplingņØä ĒåĄĒĢ┤ ņä£ ļ¬©ļŹĖ ņ×Éņ▓┤ņØś ļČäĒżņŚÉ ņØśĒĢ£ Ēæ£ļ│ĖņØä ņłśņ¦æĒĢĀ ņłś ņ׳ļŗż. ŌŚŗ ņ×äņØśņØś ļŹ░ņØ┤Ēä░ņŚÉņä£ ņČ£ļ░£ĒĢ┤ņä£ Ēæ£ņ¦æņØä ĒĢśļ®┤ ņ┤łĻĖ░ņŚÉļŖö ņ▓śņØī Ļ░ÆņŚÉ ņØśņĪ┤ĒĢśņ¦Ćļ¦ī ņČ®ļČäĒĢ£ ņŗ£Ļ░äņØ┤ ņ¦Ćļé£ ĒøäņŚÉļŖö ņ┤łĻĖ░ ņāüĒā£ņŚÉ Ļ┤ĆĻ│äņŚåņØ┤ ļ¬©ļŹĖ ņ×Éņ▓┤ņŚÉ ĻĖ░ļ░śĒĢ£ Ēæ£ļ│ĖņØä ņłśņ¦æĒĢĀ ņłś ņ׳ļŗż. ŌŚÅ ņŚÉļäłņ¦Ć Ļ┤ĆņĀÉņŚÉņä£ ņäżļ¬ģĒĢśļ®┤ Gibbs SamplingņØä ņČ®ļČäĒ׳ ļ¦ÄņØ┤ ĒĢśļ®┤ RBMņØ┤ ņŚÉ ļäłņ¦Ć ĒÅēĒśĢ ņāüĒā£ņŚÉ ļÅäļŗ¼ĒĢśĻ▓ī ļÉ£ļŗż.
- 20. Contrastive Divergence Definition ŌŚÅ negative phaseļź╝ ļ¬©ļōĀ Ļ░ĆļŖźĒĢ£ ņ×ģļĀź ļŹ░ņØ┤Ēä░ņŚÉ ļīĆĒĢ£ ĻĖ░ļīĆĻ░Æņ£╝ļĪ£ Ļ│äņé░ĒĢśņ¦Ć ņĢŖ Ļ│Ā ļ¬©ļŹĖņØś ņŚÉļäłņ¦Ć ĒÅēĒśĢ ņāüĒā£ņŚÉņä£ņØś ņāśĒöīĻ░Æ ĒĢśļéśļĪ£ļ¦ī ĻĘ╝ņé¼ĒĢ£ļŗż. ŌŚŗ ļ¬©ļŹĖņØ┤ ņŚÉļäłņ¦Ć ĒÅēĒśĢ ņāüĒā£ņŚÉ ņ׳ļŗżļ®┤ ĻĘĖ ļĢīņØś ņāśĒöīĻ░ÆņØĆ ĒÅēĻĘĀņŚÉ Ļ░ĆĻ╣īņÜĖ Ļ░ĆļŖźņä▒ņØ┤ ļåÆ ĻĖ░ ļĢīļ¼ĖņŚÉ Reasonable ĒĢśļŗż. ŌŚÅ Gibbs SamplingņØä ņØ┤ņÜ®ĒĢ┤ ņāśĒöīņØä ņ¢╗ļŖöļŗż. ŌŚÅ Update ruleņØä ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ļŗżņŗ£ ņōĖ ņłś ņ׳ļŗż.
- 21. Contrastive Divergence CD-k with Alternative Gibbs Sampling [Hinton 02] ŌŚÅ Gibbs SamplingņØś ņŗ£ņ×æņØä ņ×äņØśņØś Ļ░ÆņØ┤ ņĢäļŗłļØ╝ training dataļĪ£ ĒĢ£ļŗż. ŌŚÅ Gibbs SamplingņØä ļ¼┤ĒĢ£ļ▓ł ĒĢśņ¦Ć ņĢŖĻ│Ā kļ▓łļ¦ī ĒĢ£ļŗż. ŌŚÅ ņŗżņ¦łņĀüņ£╝ļĪ£ļŖö 1ļ▓łļ¦ī ĒĢ┤ļÅä ņČ®ļČäĒ׳ ņóŗņØĆ ņāśĒöīņØä ņ¢╗ņØä ņłś ņ׳ļŗż. ŌŚŗ TrainingņØä ĒĢĀņłśļĪØ ļ¬©ļŹĖņØ┤ Ļ░Ćņ¦ĆļŖö ļČäĒżļŖö training setņØś ļČäĒżļź╝ ļö░ļØ╝Ļ░äļŗż. ņ”ē, training dataĻ░Ć ņØ┤ļ»Ė ļ¬©ļŹĖņØś ļČäĒżļź╝ ņ¢┤ļŖÉ ņĀĢļÅä Ēæ£ĒśäĒĢśĻ│Ā ņ׳ļŗżļŖö Ļ▓āņØ┤ļŗż. ļö░ļØ╝ņä£ training dataļĪ£ļČĆĒä░ ņāśĒöīļ¦üņØä ņŗ£ņ×æĒĢśļ®┤ ņØ┤ļ»Ė ņ¢┤ļŖÉ ņĀĢļÅä ņłśļĀ┤ļÉ£ ņ¦ĆņĀÉļČĆĒä░ ņāśĒöīļ¦ü ņØä ņŗ£ņ×æĒĢśļŖö Ļ▓āņØ┤ļØ╝Ļ│Ā ļ│╝ ņłś ņ׳ņ¢┤ņä£ 1ļ▓łļ¦īņŚÉ ņóŗņØĆ ņāśĒöīņØä ņ¢╗ņØä ņłś ņ׳ļŗż. ŌŚÅ 1ļ▓ł ņāśĒöīļ¦üĒĢ┤ņä£ ņ¢╗ņ¢┤ņ¦ä visible dataļź╝ reconstrunctionņØ┤ļØ╝Ļ│Ā ĒĢśĻ│Ā ĒŖĖļĀłņØ┤ļŗØ ņØ┤ ņĀ£ļīĆļĪ£ ļÉśĻ│Ā ņ׳ļŗżļ®┤ reconstruction errorĻ░Ć Ļ░ÉņåīĒĢ£ļŗż. ņ”ē, ņØ┤ņāüņĀüņØĖ RBM ņØĆ input dataļź╝ ņ¦æņ¢┤ļäŻņ£╝ļ®┤ ļÅÖņØ╝ĒĢ£ reconstruction visible dataļź╝ ņ¢╗ņØä ņłś ņ׳ ļŗż.
- 22. Contrastive Divergence persistent CD [Tieleman 08] ŌŚÅ Gibbs SamplingņØä ĒĢĀ ļĢī ĻĖ░ņĪ┤ CD-k ņŚÉņä£ļŖö ļ¦żļ▓ł Ļ░üĻ░üņØś training dataņŚÉ ļīĆ ĒĢ┤ ņāśĒöīļ¦üĒĢśņ¦Ćļ¦ī persistent CDņŚÉņä£ļŖö ņØ┤ņĀä Gibbs SamplingņŚÉņä£ Ļ│äņé░ļÉ£ data (reconstruction data)ļź╝ ļŗżņØī ļ▓ł SamplingņØś ņŗ£ņ×æņ£╝ļĪ£ ņé¼ņÜ®ĒĢ£ļŗż. ņ”ē, ņ▓½ ļ▓łņ¦Ė training dataĻ░Ć persistent chainņØś ņŗ£ņ×æņØ┤ ļÉśĻ│Ā ņĀäļ▓łņØś Gibbs Sampling Ļ▓░Ļ│╝ļź╝ ļŗżņØī ļ▓ł trainingņØś ņŗ£ņ×æņ£╝ļĪ£ ņé¼ņÜ®ĒĢśņŚ¼ ChainņØä ņØ┤ņ¢┤ļéśĻ░äļŗż. ŌŚŗ ņØ┤ļĀćĻ▓ī ChainņØä ņØ┤ņ¢┤ ļéśĻ░Ćļ®┤ ļ¼┤ĒĢ£ļ▓ł SamplingĒĢśļŖö Ļ▓āĻ│╝ ļ╣äņŖĘĒĢ┤ņ¦ĆļŖö ĒÜ©Ļ│╝ļź╝ Ļ░¢Ļ▓ī ļÉ£ļŗż. ļ¼╝ļĪĀ ļ¦ż Gibbs Samplingļ¦łļŗż ĒīīļØ╝ļ»ĖĒä░Ļ░Ć Update ļÉśņ¢┤ņä£ ļ¬©ļŹĖņØ┤ ļ│ĆĒĢśĻĖ┤ ĒĢś ņ¦Ćļ¦ī ļ¦żņÜ░ ņ×æņØĆ Ļ░ÆņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ĻĘ╝ņé¼ņĀüņ£╝ļĪ£ ņä▒ļ”ĮĒĢ£ļŗż.
- 23. Examples [HintonŌĆÖs lecture] ņł½ņ×É 2ļź╝ ĒĢÖņŖĄĒĢśļŖö ņśłņĀ£ ŌŚÅ 16 x 16 Ēü¼ĻĖ░ņØś ņØ┤ļ»Ėņ¦Ć (256 Ļ░£ņØś visible ļē┤ļ¤░) ŌŚÅ 50Ļ░£ņØś binary hidden ļē┤ļ¤░ ŌŚŗ ņØ┤ Ļ▓ĮņÜ░ Hidden unit = Feature detector = Feature Extractor ŌŚÅ CD-1ņ£╝ļĪ£ ĒĢÖņŖĄ ŌŚÅ Ļ░ü ļē┤ļ¤░ņØś WeightļŖö ļ×£ļŹżĻ░Æņ£╝ļĪ£ ņ┤łĻĖ░ĒÖö
- 24. Examples [HintonŌĆÖs lecture] 50Ļ░£ņØś Hidden UnitņØś Weightļź╝ ņØ┤ļ»Ėņ¦ĆļĪ£ ĻĘĖļ”░ Ļ▓ā
- 32. Examples [HintonŌĆÖs lecture] Ļ░ü ļē┤ļ¤░ņØ┤ ņł½ņ×É 2ņØś ņä£ļĪ£ ļŗżļźĖ Featureļź╝ ņ×ĪņĢäļé┤ļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ņØī
- 33. Examples [HintonŌĆÖs lecture] ĒģīņŖżĒŖĖ ņØ┤ļ»Ėņ¦ĆļĪ£ ReconstructionņØä ĒĢ┤ļ│┤ļ®┤.. ĒģīņŖżĒŖĖņÜ® ņØ┤ļ»Ėņ¦Ć Reconstruction ĒģīņŖżĒŖĖņÜ® ņØ┤ļ»Ėņ¦Ć Reconstruction ŌŚÅ ņØ┤ ļäżĒŖĖņøīĒü¼ļŖö ņł½ņ×É 2ņŚÉ ļīĆĒĢ┤ņä£ļ¦ī ĒøłļĀ©ļÉśņ¢┤ ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ļ¬©ļōĀ ņØ┤ļ»Ėņ¦Ćļź╝ ņł½ ņ×É 2ļĪ£ ņØ┤ĒĢ┤ĒĢśļĀżĻ│Ā ĒĢ£ļŗż.
- 34. Examples [Larochelle 09] MNIST
- 35. Examples [Larochelle 09] MNIST ŌŚÅ Ļ░ü Hidden unitņØ┤ Edge(ĒÄ£ņŖżĒŖĖļĪ£Ēü¼)ļź╝ ļĮæņĢäļé┤ļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ņØī.
- 36. Extensions Unsupervised Learning ŌŚÅ Feature Extractor ŌŚÅ ļŗżļźĖ Supervised LearningņØś pre-training ŌŚŗ Deep Belief Network [Hinton Neural Computation 06] ŌŚŗ Deep Auto-Encoder [Hinton Science 06] ŌŚÅ Collaborative Filtering (Netflix Prize 2007 winner) [Salakhutdinov 07] ŌŚŗ Conditional RBM (with Gaussian Unit) ŌŚŗ Conditional Factored RBM ŌŚÅ Generator (Human motion modeling) [Taylor 06] ŌŚŗ Conditional RBM
- 37. Extensions Supervised Learning ŌŚÅ Classifier [Larochelle 08] ŌŚŗ Classification RBM ŌŚŗ Discriminitive RBM ŌŚŗ Hybrid Discriminitive RBM
- 38. References ŌŚÅ [Bengio 09] Learning Deep Architectures for AI ŌŚÅ [Deeplearning.net] Deep learning tutorial - RBM ŌŚÅ [Hinton 02] Training Products of Experts by Minimizing Contrastive Divergence ŌŚÅ [Tieleman 08] Training Restricted Boltzmann Machines using Approximations to the Likelihood Gradient ŌŚÅ [Larochelle 09] Exploring Strategies for Training Deep Neural Networks ŌŚÅ [Hinton Neural Computation 06] A Fast Learning Algorithm for Deep Belief Network ŌŚÅ [Hinton Science 06] Reducing the Dimensionality of Data with Neural Networks ŌŚÅ [Salakhutdinov 07] Restricted Boltzmann machines for collaborative filtering ŌŚÅ [Taylor 06] Modeling Human Motion Using Binary Latent Variables ŌŚÅ [Larochelle 08] Classification using Discriminative Restricted Boltzmann Machines
- 39. Ļ░Éņé¼ŪĻ®ļŗłļŗż.