[ERRO] Predavanje: RTOS
ŌĆóDownload as ODP, PDFŌĆó
0 likesŌĆó211 views

Video: https://www.youtube.com/watch?v=pph39EExsRA&list=PLYqeapOP_CtQKuyzaHtJz16r5JaM4vs-w&index=14 https://www.youtube.com/watch?v=nqT_YnSOZtM&index=15&list=PLYqeapOP_CtQKuyzaHtJz16r5JaM4vs-w
[ERRO] Predavanje: RTOS
- 1. KONCEPTI RTOS-a Tehni─Źko veleu─Źili┼Īte u Zagrebu Elektrotehni─Źki odjel Stipe Predani─ć 24.11.2016 ELEKTRONI─īKA RA─īUNALA I RA─īUNALNA OPREMA
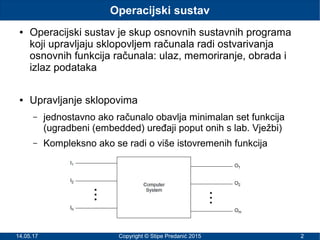
- 2. 14.05.17 Copyright ┬® Stipe Predani─ć 2015 2 Operacijski sustav ŌŚÅ Operacijski sustav je skup osnovnih sustavnih programa koji upravljaju sklopovljem ra─Źunala radi ostvarivanja osnovnih funkcija ra─Źunala: ulaz, memoriranje, obrada i izlaz podataka ŌŚÅ Upravljanje sklopovima ŌĆō jednostavno ako ra─Źunalo obavlja minimalan set funkcija (ugradbeni (embedded) ure─æaji poput onih s lab. Vje┼Šbi) ŌĆō Kompleksno ako se radi o vi┼Īe istovremenih funkcija
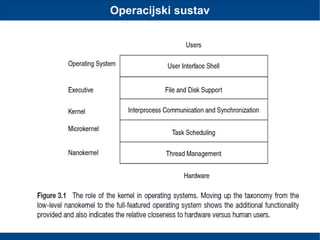
- 3. Operacijski sustav ŌŚÅ Minimalna funkcionalnost OS-a ŌĆō Raspore─æivanje zadataka (eng. Task scheduling) ŌŚÅ koji zadatak ─će biti idu─ći poslan na obradu ŌĆō Slanje (proslje─æivanje) zadataka na obradu (eng. Task dispatching) ŌŚÅ priprema memorije i ostalih elemenata procesora kako bi procesor u budu─ćnosti obradio upravo ┼Šeljeni zadatak ŌĆō Komunikacija izme─æu zadataka (eng. Intertask communication) ŌŚÅ zadaci moraju mo─ći me─æusobno razgovarati kako bi proslje─æivali podatke izme─æu procesa. ŌŚÅ Kernel (nucleus, jezgra) ŌĆō minimalan OS koji obavlja (barem) gornje 3 zada─će ŌŚÅ ─īesto se za kernel ─Źuje kad se govori o Linuxu ŌĆō osnovni kernel je dostupan za razli─Źite platforme, a dodatni softver (nadogradnja na kernel) ─Źini "distribuciju"
- 5. Real time Operating System (RTOS) ŌŚÅ Sustav za rad u realnom vremenu (eng. Real-time operating system ŌĆō RTOS) je vi┼Īe zada─ćni operacijski sustav koji izvr┼Īava aplikacije u realnom vremenu ŌĆō operacije bez vidljive zadr┼Īke ŌŚÅ CPU ne mo┼Še raditi vi┼Īe stvari istovremeno ŌĆō samo jedna naredba se izvr┼Īava u nekom trenutku ŌĆō kako ostvariti istovremeni rad vi┼Īe zada─ća u isto vrijeme? ŌŚÅ Rje┼Īenje: koristiti specijalizirane algoritme za raspore─æivanje zadataka (task scheduling) ŌŚÅ Napomena: u literaturi su uobi─Źajeni nazivi RTS (eng. Real time systems) i RTOS, ali je mogu─će prona─ći i doma─ću kraticu SRSV (Sustavi za Rad u Stvarnom Vremenu)
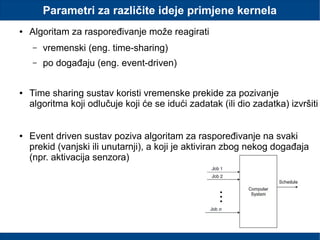
- 6. Parametri za razli─Źite ideje primjene kernela ŌŚÅ Algoritam za raspore─æivanje mo┼Še reagirati ŌĆō vremenski (eng. time-sharing) ŌĆō po doga─æaju (eng. event-driven) ŌŚÅ Time sharing sustav koristi vremenske prekide za pozivanje algoritma koji odlu─Źuje koji ─će se idu─ći zadatak (ili dio zadatka) izvr┼Īiti ŌŚÅ Event driven sustav poziva algoritam za raspore─æivanje na svaki prekid (vanjski ili unutarnji), a koji je aktiviran zbog nekog doga─æaja (npr. aktivacija senzora)
- 7. Podjela sustava za rad u stvarnom vremenu ŌŚÅ Prema posljedicama nepo┼Ītivanja ograni─Źenja RTS sustavi se dijele na: ŌĆō stroge (engl. hard RTS) ŌŚÅ jedan pogre┼Īno ili zaka┼Īnjelo obra─æeni ulazni doga─æaj dovodi do katastrofalnog doga─æaja u sustavu ŌĆō npr. nuklearna elektrana ŌĆō ubla┼Šene (engl. soft RTS) ŌŚÅ pogre┼Īno ili zaka┼Īnjelo obra─æeni doga─æaji ne dovodi do katastrofalnog zavr┼Īetka ŌĆō npr. grijanje u prostoru gdje se dogodi i pregrijavanje ili preveliko hla─æenje ŌĆō ─Źvrste (engl. firm RTS) ŌŚÅ poneki pogre┼Īno ili zaka┼Īnjelo obra─æeni doga─æaj nije kriti─Źan, ali vi┼Īe takvih dovodi do katastrofalnog zavr┼Īetka ŌĆō npr. sustav detekcije kolizije s drugim objektom mo┼Še propustiti jedan doga─æaj (idu─ći ─će ispraviti problem), ali ako ih propusti nekoliko zaredom do─ći ─će do kolizije ŌŚÅ Vremenski rokovi (eng. Deadlines) ŌĆō minimalno vrijeme unutar kojeg doga─æaj mora biti obra─æen
- 8. Parametri za razli─Źite ideje primjene kernela ŌŚÅ Periodi─Źnost doga─æaja ŌĆō sporadi─Źno ŌŚÅ pojavljuju se nenadano ŌĆō aperiodi─Źki ŌŚÅ nepravilni gledaju─ći to─Źna vremena, ali statisti─Źki postoji jednoliki razmak od kojeg postoji manji otklon ŌĆō periodi─Źki ŌŚÅ pojavljuju se u istim vremenskim razmacima ŌŚÅ Doga─æaji me─æusobno mogu biti ŌĆō sinkroni ŌŚÅ dva doga─æaja za koja se zna to─Źna vremenska razlika u po─Źetku aktivacije ŌĆō uskla─æeni su ŌĆō ne moraju biti periodi─Źki, samo uskla─æeni vremenski ŌĆō asinkroni ŌŚÅ dva doga─æaja nemaju uskla─æeno vremena aktivacije
- 9. Strategije za izradu kernela ŌŚÅ Petlja s prozivanjem (Polled Loop Systems) ŌŚÅ Kru┼Šno pokretanje (Cyclic Executive) ŌŚÅ Kooperativna vi┼Īezada─ćnost (Cooperative Multitasking) ŌŚÅ Sustav s prekidima (Interrupt-Driven Systems) ŌŚÅ Prednji/pozadinski sustav (Foreground/Background Systems) ŌŚÅ Operacijski sustav za rad u stvarnom vremenu (RTOS)
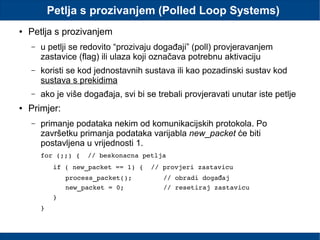
- 10. Petlja s prozivanjem (Polled Loop Systems) ŌŚÅ Petlja s prozivanjem ŌĆō u petlji se redovito ŌĆ£prozivaju doga─æajiŌĆØ (poll) provjeravanjem zastavice (flag) ili ulaza koji ozna─Źava potrebnu aktivaciju ŌĆō koristi se kod jednostavnih sustava ili kao pozadinski sustav kod sustava s prekidima ŌĆō ako je vi┼Īe doga─æaja, svi bi se trebali provjeravati unutar iste petlje ŌŚÅ Primjer: ŌĆō primanje podataka nekim od komunikacijskih protokola. Po zavr┼Īetku primanja podataka varijabla new_packet ─će biti postavljena u vrijednosti 1. for┬Ā(;;)┬Ā{┬Ā┬Ā//┬Ābeskonacna┬Āpetlja if┬Ā(┬Ānew_packet┬Ā==┬Ā1)┬Ā{┬Ā┬Ā//┬Āprovjeri┬Āzastavicu process_packet();┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā//┬Āobradi┬Ādoga aj─æ new_packet┬Ā=┬Ā0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā//┬Āresetiraj┬Āzastavicu } }
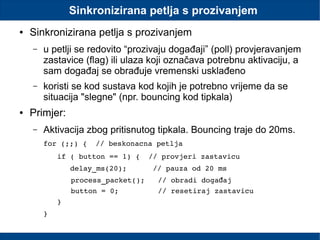
- 11. Sinkronizirana petlja s prozivanjem ŌŚÅ Sinkronizirana petlja s prozivanjem ŌĆō u petlji se redovito ŌĆ£prozivaju doga─æajiŌĆØ (poll) provjeravanjem zastavice (flag) ili ulaza koji ozna─Źava potrebnu aktivaciju, a sam doga─æaj se obra─æuje vremenski uskla─æeno ŌĆō koristi se kod sustava kod kojih je potrebno vrijeme da se situacija "slegne" (npr. bouncing kod tipkala) ŌŚÅ Primjer: ŌĆō Aktivacija zbog pritisnutog tipkala. Bouncing traje do 20ms. for┬Ā(;;)┬Ā{┬Ā┬Ā//┬Ābeskonacna┬Āpetlja if┬Ā(┬Ābutton┬Ā==┬Ā1)┬Ā{┬Ā┬Ā//┬Āprovjeri┬Āzastavicu ┬Ā┬Ā┬Ādelay_ms(20);┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā//┬Āpauza┬Āod┬Ā20┬Āms process_packet();┬Ā┬Ā┬Ā//┬Āobradi┬Ādoga aj─æ button┬Ā=┬Ā0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā//┬Āresetiraj┬Āzastavicu } }
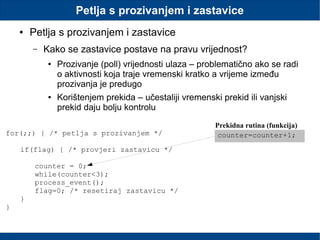
- 12. Petlja s prozivanjem i zastavice ŌŚÅ Petlja s prozivanjem i zastavice ŌĆō Kako se zastavice postave na pravu vrijednost? ŌŚÅ Prozivanje (poll) vrijednosti ulaza ŌĆō problemati─Źno ako se radi o aktivnosti koja traje vremenski kratko a vrijeme izme─æu prozivanja je predugo ŌŚÅ Kori┼Ītenjem prekida ŌĆō u─Źestaliji vremenski prekid ili vanjski prekid daju bolju kontrolu for(;;) { /* petlja s prozivanjem */ if(flag) { /* provjeri zastavicu */ counter = 0; while(counter<3); process_event(); flag=0; /* resetiraj zastavicu */ } } counter=counter+1; Prekidna rutina (funkcija)
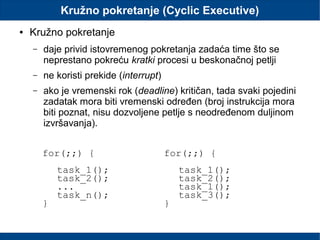
- 13. Kru┼Šno pokretanje (Cyclic Executive) ŌŚÅ Kru┼Šno pokretanje ŌĆō daje privid istovremenog pokretanja zada─ća time ┼Īto se neprestano pokre─ću kratki procesi u beskona─Źnoj petlji ŌĆō ne koristi prekide (interrupt) ŌĆō ako je vremenski rok (deadline) kriti─Źan, tada svaki pojedini zadatak mora biti vremenski odre─æen (broj instrukcija mora biti poznat, nisu dozvoljene petlje s neodre─æenom duljinom izvr┼Īavanja). for(;;) { task_1(); task_2(); ... task_n(); } for(;;) { task_1(); task_2(); task_1(); task_3(); }
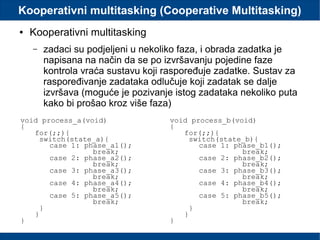
- 14. Kooperativni multitasking (Cooperative Multitasking) ŌŚÅ Kooperativni multitasking ŌĆō zadaci su podjeljeni u nekoliko faza, i obrada zadatka je napisana na na─Źin da se po izvr┼Īavanju pojedine faze kontrola vra─ća sustavu koji raspore─æuje zadatke. Sustav za raspore─æivanje zadataka odlu─Źuje koji zadatak se dalje izvr┼Īava (mogu─će je pozivanje istog zadataka nekoliko puta kako bi pro┼Īao kroz vi┼Īe faza) void process_a(void) { for(;;){ switch(state_a){ case 1: phase_a1(); break; case 2: phase_a2(); break; case 3: phase_a3(); break; case 4: phase_a4(); break; case 5: phase_a5(); break; } } } void process_b(void) { for(;;){ switch(state_b){ case 1: phase_b1(); break; case 2: phase_b2(); break; case 3: phase_b3(); break; case 4: phase_b4(); break; case 5: phase_b5(); break; } } }
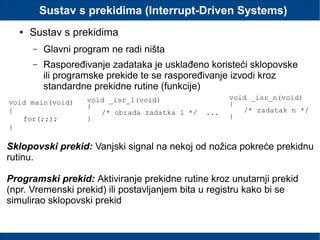
- 15. Sustav s prekidima (Interrupt-Driven Systems) ŌŚÅ Sustav s prekidima ŌĆō Glavni program ne radi ni┼Īta ŌĆō Raspore─æivanje zadataka je uskla─æeno koriste─ći sklopovske ili programske prekide te se raspore─æivanje izvodi kroz standardne prekidne rutine (funkcije) void main(void) { for(;;); } void _isr_1(void) { /* obrada zadatka 1 */ ... } void _isr_n(void) { /* zadatak n */ } Sklopovski prekid: Vanjski signal na nekoj od no┼Šica pokre─će prekidnu rutinu. Programski prekid: Aktiviranje prekidne rutine kroz unutarnji prekid (npr. Vremenski prekid) ili postavljanjem bita u registru kako bi se simulirao sklopovski prekid
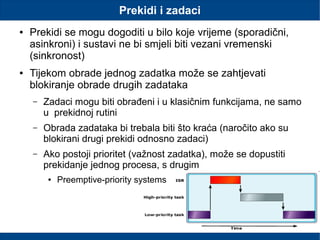
- 16. Prekidi i zadaci ŌŚÅ Prekidi se mogu dogoditi u bilo koje vrijeme (sporadi─Źni, asinkroni) i sustavi ne bi smjeli biti vezani vremenski (sinkronost) ŌŚÅ Tijekom obrade jednog zadatka mo┼Še se zahtjevati blokiranje obrade drugih zadataka ŌĆō Zadaci mogu biti obra─æeni i u klasi─Źnim funkcijama, ne samo u prekidnoj rutini ŌĆō Obrada zadataka bi trebala biti ┼Īto kra─ća (naro─Źito ako su blokirani drugi prekidi odnosno zadaci) ŌĆō Ako postoji prioritet (va┼Šnost zadatka), mo┼Še se dopustiti prekidanje jednog procesa, s drugim ŌŚÅ Preemptive-priority systems
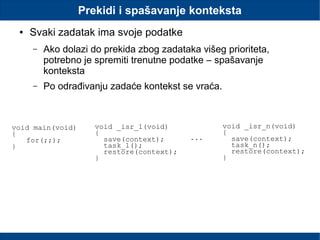
- 17. Prekidi i spa┼Īavanje konteksta ŌŚÅ Svaki zadatak ima svoje podatke ŌĆō Ako dolazi do prekida zbog zadataka vi┼Īeg prioriteta, potrebno je spremiti trenutne podatke ŌĆō spa┼Īavanje konteksta ŌĆō Po odra─æivanju zada─će kontekst se vra─ća. void main(void) { for(;;); } void _isr_1(void) { save(context); task_1(); restore(context); } void _isr_n(void) { save(context); task_n(); restore(context); } ...
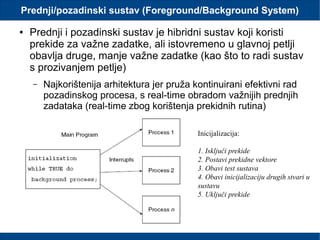
- 18. Prednji/pozadinski sustav (Foreground/Background System) ŌŚÅ Prednji i pozadinski sustav je hibridni sustav koji koristi prekide za va┼Šne zadatke, ali istovremeno u glavnoj petlji obavlja druge, manje va┼Šne zadatke (kao ┼Īto to radi sustav s prozivanjem petlje) ŌĆō Najkori┼Ītenija arhitektura jer pru┼Ša kontinuirani efektivni rad pozadinskog procesa, s real-time obradom va┼Šnijih prednjih zadataka (real-time zbog kori┼Ītenja prekidnih rutina) Inicijalizacija: 1. Isklju─Źi prekide 2. Postavi prekidne vektore 3. Obavi test sustava 4. Obavi inicijalizaciju drugih stvari u sustavu 5. Uklju─Źi prekide
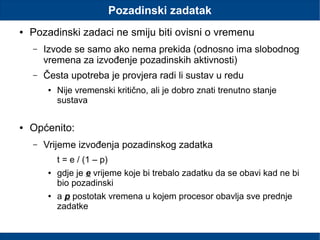
- 19. Pozadinski zadatak ŌŚÅ Pozadinski zadaci ne smiju biti ovisni o vremenu ŌĆō Izvode se samo ako nema prekida (odnosno ima slobodnog vremena za izvo─æenje pozadinskih aktivnosti) ŌĆō ─īesta upotreba je provjera radi li sustav u redu ŌŚÅ Nije vremenski kriti─Źno, ali je dobro znati trenutno stanje sustava ŌŚÅ Op─ćenito: ŌĆō Vrijeme izvo─æenja pozadinskog zadatka t = e / (1 ŌĆō p) ŌŚÅ gdje je e vrijeme koje bi trebalo zadatku da se obavi kad ne bi bio pozadinski ŌŚÅ a p postotak vremena u kojem procesor obavlja sve prednje zadatke
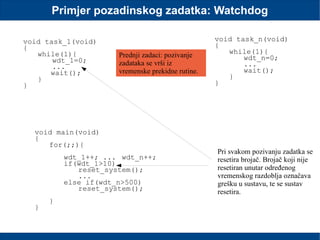
- 20. Primjer pozadinskog zadatka: Watchdog void task_1(void) { while(1){ wdt_1=0; ... wait(); } } void task_n(void) { while(1){ wdt_n=0; ... wait(); } } void main(void) { for(;;){ wdt_1++; ... wdt_n++; if(wdt_1>10) reset_system(); ... else if(wdt_n>500) reset_system(); } } Prednji zadaci: pozivanje zadataka se vr┼Īi iz vremenske prekidne rutine. Pri svakom pozivanju zadatka se resetira broja─Ź. Broja─Ź koji nije resetiran unutar odre─æenog vremenskog razdoblja ozna─Źava gre┼Īku u sustavu, te se sustav resetira.
- 21. Operacijski sustav za rad u stvarnom vremenu (RTOS) ŌŚÅ Prednji/pozadinski sustav je dobar za specijaliziranu sklopovski izvedbu, no potpuni operacijski sustav ima i dodatne mogu─ćnosti: podr┼Īka za mre┼Šne komunikacijske protokole, dodatni sklopovi su podr┼Šani kroz sustav pokreta─Źa (drivera), podr┼Šani su sustavi za lako uo─Źavanje i ispravljanje gre┼Īaka (debugging) ŌŚÅ Takvi sustavi imaju razli─Źite kompleksne algoritme za uskla─æivanje zadataka unutar okvira opisanih u prija┼Īnjim primjerima ŌĆō Npr. Kako ostvariti preemptive prioritete ili va┼Šnost pojedinih zadataka u kooperativnom multitaskingu ŌŚÅ Popularni RTOS sustavi su: ŌĆō QNX ŌĆō VxWorks ŌĆō Real-Time Unix ŌĆō Real-Time Linux ŌĆō ....
- 22. RTOS Real-Time kernel daje podr┼Īku za A. Rad s prekidima B. Rad s raspore─æivanjem zadataka (kooperativni multitasking + preemptive priority) C. Komunikacija i sinkronizacija izme─æu zadataka D. Rad sa sustavom koji mjeri vrijeme E. Upravljanje memorijom F. Podr┼Īka za ulazno izlazne jedinice (kori┼Ītenje pokreta─Źkih (driver) programa) G. Brzo prikupljanje podataka s U/I jedinica H. Korisni─Źka kontrola sistemskih resursa I. Rad s gre┼Īkama i iznimkama ’ü¼ Real-time OS mora podr┼Šavati stvaranje, brisanje i raspore─æivanja vi┼Īe zadataka istovremeno ’ü¼ Real-time OS mora mo─ći obraditi svaki doga─æaj na strogo determinirani na─Źin (poznat na─Źin i vrijeme obrade) ’ü¼ Real-time OS mora podr┼Šavati pouzdanu i brzu komunikaciju izme─æu procesa kroz poznate procese, poput proslje─æivanja poruka, djeljene memorije i semafora. ’ü¼ Real-time OS mora mo─ći obraditi vrlo velike koli─Źine podataka u kratkom vremenu
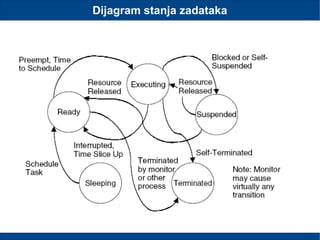
- 23. RTOS sustavi raspore─æivanja zadataka ŌŚÅ Zadatak-kontrola blok na─Źin rada ŌĆō Eng. Task-Control Block Mode ŌĆō Svaki stvoreni zadatak je u jednom od 4 stanja: 1)Izvodi se (Executing) ŌŚÅ samo jedan zadatak u bilo kojem trenutku mo┼Še biti u ovom stanju 2)Pripravan (Ready) ŌŚÅ Zadatak je spreman za izvo─æenje, ali nije trenutno aktivan ŌŚÅ Ovdje je ako je pripremljen (preemptive) ili ako je njegovo vrijeme za rad isteklo 3)Suspendiran ili blokiran (Suspended / Blocked) ŌŚÅ Trenutno je neaktivan i ─Źeka da ga netko pozove ili ─Źeka na neki resurs koji je trenutno zauzet 4) Spava ( Dormant / Sleep) ŌŚÅ Zadatak nije uvijek dostupan OS-u (npr. mo┼Šda je spreman za brisanje)
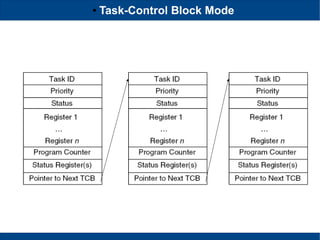
- 24. ŌŚÅ Task-Control Block Mode
- 26. Za one koji ┼Šele znati vi┼Īe ŌŚÅ http://www.zemris.fer.hr/~leonardo/ ŌĆō Real-Time Systems (SzRuSV), ŌĆō Operating Systems for Embedded Computers (OszUR) ŌŚÅ http://www.mouloudrahmani.com/ElectricalEngineering/Embedd ŌŚÅ http://web.mit.edu/16.070/www/year2001/RTOS27.pdf ŌŚÅ http://web.mit.edu/16.070/www/year2001/RTOS28.pdf