


I
- 1. ╚╦ķgż╚ż╬ŽÓ╗źū„ė├ż╦╗∙ż┼ż» źęźÕ®`ź▐ź╬źżź╔źĒź▄ź├ź╚╔Žż╬šZĒś ż╚Æżäėż╬ź¬ź¾źķźżź¾č¦┴Ģ ¢|Š®╣żśI┤¾č¦ ū¶╠┘š├č¾ ┘RąĪ£Y ąĪé}║═┘F ķL╣╚┤©ą▐ ļŖūėŪķł¾═©ą┼č¦╗ßšō╬─šI, D Vol.J91-D, No.8, pp.2045-2060 (2008)
- 2. 1/22 1.1 蹊┐ż╬▒│Š░ ? źĄ®`źėź╣źĒź▄ź├ź╚żžż╬Ų┌┤²ż¼Ė▀ż▐żļ ? ╚╦ķgż╚ż╬ź│ź▀źÕź╦ź▒®`źĘźńź¾Ż©čįšZ─▄┴”Ż®ż¼ųžę¬ż╩ę¬╦ž ? ÅŠ└┤ą═źĒź▄ź├ź╚ż╬å¢Ņ}ĄŃŻ©ź┐ź╣ź»ę└┤µŻ® ? źūźĒź░źķźÓżĄżņż┐ū┤ørżĘż½īØÅĻżŪżŁż╩żż ? źūźĒź░źķźÓżĄżņżŲżżż╩żżčį╚~żŪįÆżĘż½ż▒żķżņżļż╚??? ? źūźĒź░źķźÓżĄżņżŲżżż╩żżū┤ørż╦īØÅĻż╣żļż╦żŽŻ┐ ? ų¬żķż╩żżčį╚~żŪżŌĪóęŖż┐żĻĪó┬äżżż┐żĻżĘżŲęŌ╬Čż“½@Ą├ żŪżŁżņżą┴╝żż ? ź¬ź¾źķźżź¾żŪūĘ╝ėĄ─ż╦čįšZ─▄┴”ż“½@Ą├ żŪżŁżļźĒź▄ź├ź╚ż¼Ū¾żßżķżņżŲżżżļ
- 3. 2/22 1.2 čįšZ½@Ą├ż╦ż¬ż▒żļšnŅ} Ż▒Ż«ģgšZź░źķź”ź¾źŪźŻź¾ź░Ż©ģgšZźņź┘źļż╬ęŌ╬Č└ĒĮŌŻ® ? ę¶╔∙źčź┐®`ź¾ż╚Ė┼─ŅŻ©ĖąęÖŪķł¾Ż®ż╬īØÅĻĖČż▒ ĪĖ│ÓĪ╣ īØÅĻ Ż▓Ż«╬─Ę©ż╬č¦┴ĢŻ©╬─š┬źņź┘źļż╬ęŌ╬Č└ĒĮŌŻ® ? šZĒśż╚ęŌ╬Čż╬īØÅĻĖČż▒ ? ═¼żĖģgšZż“╩╣ż├żŲżŌĪóšZĒśż¼▀`ż”ż╚▀`ż”ęŌ╬Č ? ĪĖżĻż¾ż┤Ż©ż“Ż®Īóż▀ż½ż¾Ż©ż╦Ż®ĪóĮ³ż┼ż▒żļĪ╣ ? ĪĖż▀ż½ż¾Ż©ż“Ż®ĪóżĻż¾ż┤Ż©ż╦Ż®ĪóĮ³ż┼ż▒żļĪ╣
- 4. 3/22 1.3 ╝╚┤µčąŠ┐ å¢Ņ}ĄŃ ?┤_┬╩Ą─ż╩äI└ĒĪ·┤¾┴┐ż╬č¦┴ĢźŪ®`ź┐ż¼▒žę¬ ?źąź├ź┴äI└ĒĪ·ź¬ź¾źķźżź¾?ūĘ╝ėč¦┴Ģż¼żŪżŁż╩żż ? ģgšZź░źķź”ź¾źŪźŻź¾ź░ ? Roy, PentlandżķŻ©2002Ż® ╩ųĘ©Ż║궿╚ė│Ž±ż╬ź»źĒź╣źŌ®`ź└źļŪķł¾ż“ūŅ┤¾╗» å¢Ņ}ĄŃŻ║Š▓ų╣╗ŁŽ±ż“└¹ė├Ż©äėĄ─Ė┼─Ņż“½@Ą├żŪżŁż╩żżŻ® ? Yu, Ballardżķ(2004) ╩ųĘ©Ż║ź▐źļź┴źŌ®`ź└źļŪķł¾ż╬┤_┬╩Ą─ż╩īØÅĻĖČż▒ å¢Ņ}ĄŃŻ║╬’╠Õż╚ģgšZż¼Ż▒īØŻ▒ż╦īØÅĻĪóūĘ╝ėč¦┴Ģż╦å¢Ņ}ż¼żóżļ ? ╬─Ę©ż╬č¦┴Ģ ? čęś“żķ(2003) ╩ųĘ©Ż║HMMż╦żĶżļäėĄ─Ė┼─Ņż╚šZĒśż╬½@Ą├ å¢Ņ}ĄŃŻ║╩┬Ū░ż╦źŪ®`ź┐ż“ė├ęŌżĘĪóźąź├ź┴č¦┴Ģ
- 5. 4/22 1.4 ▒ŠčąŠ┐ż╬╠žÅš ? īgŁhŠ│żŪūĘ╝ėĄ─?ūį┬╔Ą─ż╦Ė┼─Ņż“½@Ą├ ? čįšZż╬ęŌ╬Čż“░k▀_Ą─ż╦č¦┴Ģ ? ÅŠ└┤蹊┐ż╦īØż╣żļā×╬╗ąį ? ╩┬Ū░ų¬ūRż╩żĘżŪĪóĖ┼─Ņż“ĘųŅÉ ? Ż▒ż─ż╬źŪ®`ź┐ż½żķč¦┴ĢżŪżŁżļ ? ź¬ź¾źķźżź¾żŪ╬─Ę©Ż©šZĒśŻ®ż“č¦┴Ģ ? ╚ß▄øż╩ūĘ╝ėč¦┴Ģż“īg¼F
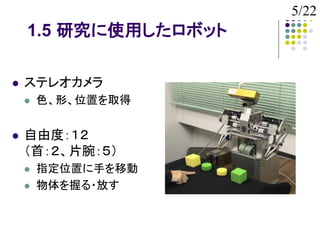
- 6. 5/22 1.5 蹊┐ż╦╩╣ė├żĘż┐źĒź▄ź├ź╚ ? ź╣źŲźņź¬ź½źßźķ ? ╔½Īóą╬Īó╬╗ų├ż“╚ĪĄ├ ? ūįė╔Č╚Ż║Ż▒Ż▓ Ż©╩ūŻ║Ż▓ĪóŲ¼═¾Ż║ŻĄŻ® ? ųĖČ©╬╗ų├ż╦╩ųż“ęŲäė ? ╬’╠Õż“╬šżļ?Ę┼ż╣
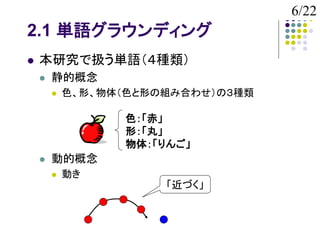
- 7. 6/22 2.1 ģgšZź░źķź”ź¾źŪźŻź¾ź░ ? ▒ŠčąŠ┐żŪÆQż”ģgšZŻ©Ż┤ĘNŅÉŻ® ? Š▓Ą─Ė┼─Ņ ? ╔½Īóą╬Īó╬’╠ÕŻ©╔½ż╚ą╬ż╬ĮMż▀║Žż’ż╗Ż®ż╬Ż│ĘNŅÉ ╔½Ż║ĪĖ│ÓĪ╣ ą╬Ż║ĪĖ═ĶĪ╣ ╬’╠ÕŻ║ĪĖżĻż¾ż┤Ī╣ ? äėĄ─Ė┼─Ņ ? äėżŁ ĪĖĮ³ż┼ż»Ī╣
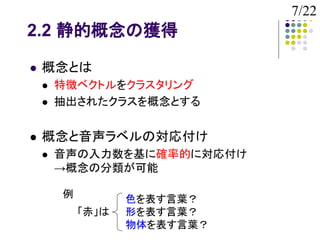
- 8. 7/22 2.2 Š▓Ą─Ė┼─Ņż╬½@Ą├ ? Ė┼─Ņż╚żŽ ? ╠žÅšź┘ź»ź╚źļż“ź»źķź╣ź┐źĻź¾ź░ ? │ķ│÷żĄżņż┐ź»źķź╣ż“Ė┼─Ņż╚ż╣żļ ? Ė┼─Ņż╚ę¶╔∙źķź┘źļż╬īØÅĻĖČż▒ ? ę¶╔∙ż╬╚ļ┴”╩²ż“╗∙ż╦┤_┬╩Ą─ż╦īØÅĻĖČż▒ Ī·Ė┼─Ņż╬ĘųŅÉż¼┐╔─▄ └² ╔½ż“▒Ēż╣čį╚~Ż┐ ĪĖ│ÓĪ╣żŽ ą╬ż“▒Ēż╣čį╚~Ż┐ ╬’╠Õż“▒Ēż╣čį╚~Ż┐
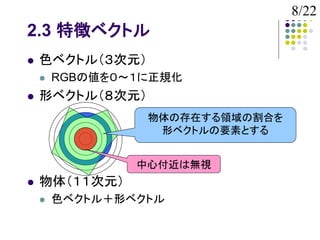
- 9. 8/22 2.3 ╠žÅšź┘ź»ź╚źļ ? ╔½ź┘ź»ź╚źļŻ©Ż│┤╬į¬Ż® ? RGBż╬éÄż“Ż░Ī½Ż▒ż╦š²ęÄ╗» ? ą╬ź┘ź»ź╚źļŻ©ŻĖ┤╬į¬Ż® ╬’╠Õż╬┤µį┌ż╣żļŅIė“ż╬ĖŅ║Žż“ ą╬ź┘ź»ź╚źļż╬ę¬╦žż╚ż╣żļ ųąą─ĖČĮ³żŽ¤oęĢ ? ╬’╠ÕŻ©Ż▒Ż▒┤╬į¬Ż® ? ╔½ź┘ź»ź╚źļŻ½ą╬ź┘ź»ź╚źļ
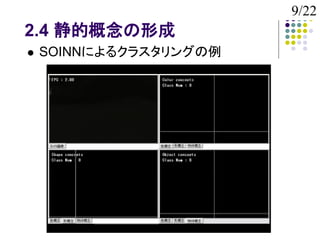
- 10. 9/22 2.4 Š▓Ą─Ė┼─Ņż╬ą╬│╔ ? │¦░┐▒§▒Ę▒Ęż╦żĶżļź»źķź╣ź┐źĻź¾ź░ż╬└²
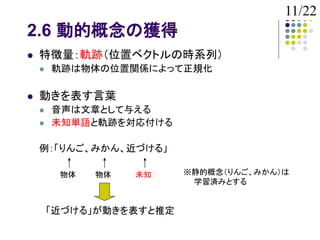
- 12. 11/22 2.6 äėĄ─Ė┼─Ņż╬½@Ą├ ? ╠žÅš┴┐Ż║▄ē█EŻ©╬╗ų├ź┘ź»ź╚źļż╬ĢrŽĄ┴ąŻ® ? ▄ē█EżŽ╬’╠Õż╬╬╗ų├ķvéSż╦żĶż├żŲš²ęÄ╗» ? äėżŁż“▒Ēż╣čį╚~ ? ę¶╔∙żŽ╬─š┬ż╚żĘżŲėļż©żļ ? ╬┤ų¬ģgšZż╚▄ē█Eż“īØÅĻĖČż▒żļ └²Ż║ĪĖżĻż¾ż┤Īóż▀ż½ż¾ĪóĮ³ż┼ż▒żļĪ╣ ╬’╠Õ ╬’╠Õ ╬┤ų¬ Ī∙Š▓Ą─Ė┼─ŅŻ©żĻż¾ż┤Īóż▀ż½ż¾Ż®żŽ č¦┴Ģ£gż▀ż╚ż╣żļ ĪĖĮ³ż┼ż▒żļĪ╣ż¼äėżŁż“▒Ēż╣ż╚═ŲČ©
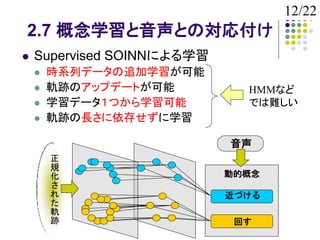
- 13. 12/22 2.7 Ė┼─Ņč¦┴Ģż╚ę¶╔∙ż╚ż╬īØÅĻĖČż▒ ? Supervised SOINNż╦żĶżļč¦┴Ģ ? ĢrŽĄ┴ąźŪ®`ź┐ż╬ūĘ╝ėč¦┴Ģż¼┐╔─▄ ? ▄ē█Eż╬źóź├źūźŪ®`ź╚ż¼┐╔─▄ HMMż╩ż╔ ? č¦┴ĢźŪ®`ź┐Ż▒ż─ż½żķč¦┴Ģ┐╔─▄ żŪżŽļyżĘżż ? ▄ē█Eż╬ķLżĄż╦ę└┤µż╗ż║ż╦č¦┴Ģ ę¶╔∙ š² ęÄ ╗» äėĄ─Ė┼─Ņ żĄ żņ Į³ż┼ż▒żļ ż┐ ▄ē █E ╗žż╣
- 15. 14/22 3.1 ╬─Ę©ż╬č¦┴Ģ ? ź▄ź╚źÓźóź├źūč¦┴Ģż╚ź╚ź├źūź└ź”ź¾č¦┴Ģż╬╚┌║Ž ? ╔┘╩²ż╬č¦┴Ģ└²ż½żķš²żĘżż╬─Ę©ż“½@Ą├ ? źóź├źūźŪ®`ź╚┐╔─▄ ? ź▄ź╚źÓźóź├źūč¦┴Ģ ? ģgšZź»źķź╣ż╬▀węŲ┤_┬╩ż“č¦┴Ģ ? śöĪ®ż╩ķLżĄż╬╬─š┬ż“╔·│╔żŪżŁżļ ? ź╚ź├źūź└ź”ź¾č¦┴Ģ ? īg╩└Įńż╬ū┤ørż╚ż╬īØÅĻĖČż▒ ? ╬─Ę©ż╬ĮŌßŗż¼ę╗ęŌż╦Č©ż▐żļ
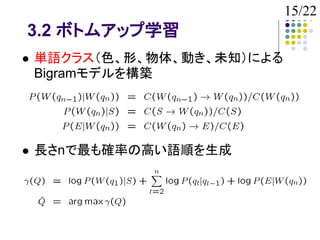
- 16. 15/22 3.2 ź▄ź╚źÓźóź├źūč¦┴Ģ ? ģgšZź»źķź╣Ż©╔½Īóą╬Īó╬’╠ÕĪóäėżŁĪó╬┤ų¬Ż®ż╦żĶżļ BigramźŌźŪźļż“śŗ║B ? ķLżĄnżŪūŅżŌ┤_┬╩ż╬Ė▀żżšZĒśż“╔·│╔
- 17. 16/22 3.3 ź╚ź├źūź└ź”ź¾č¦┴Ģ ? īg╩└Įńż╬ū┤ørż╚īØÅĻĖČż▒żŲ╬─š┬ż“ĮŌßŗ ? └²Ż║ĪĖżĻż¾ż┤Īóż▀ż½ż¾ĪóĮ³ż┼ż▒żļĪ╣ č¦ ┴Ģ ĪĖäėū„ż╬ų„╠ÕĪ·äėū„ż╬▓╬ššĄŃĪ·äėżŁż╬ĘNŅÉĪ╣ ż╚żżż”šZĒśż“½@Ą├
- 18. 17/22 3.4 ╔┘╩²└²ż½żķż╬╬─Ę©½@Ą├ ? šZĒśż╬č¦┴Ģ└² ? ĪĖżĻż¾ż┤Īóż▀ż½ż¾ĪóĮ³ż┼ż▒żļĪ╣ż“č¦┴Ģ ? ź╚ź├źūź└ź”ź¾Ż║äėū„ż╬ų„╠ÕĪ·äėū„ż╬▓╬ššĄŃĪ·äėżŁż╬ĘNŅÉ ? ź▄ź╚źÓźóź├źūŻ║╬’╠ÕĪ·╬’╠ÕĪ·äėżŁ ? ╬─š┬╔·│╔ż╬└² Ī∙Š▓Ą─Ė┼─ŅŻ©źßźĒź¾Īóźļźė®`Ż®żŽ č¦┴Ģ£gż▀ż╚ż╣żļ ĪĖźßźĒź¾Īó źļźė®`Īó Į³ż┼ż▒żļĪ╣
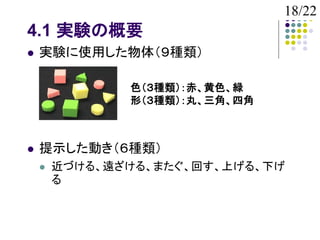
- 19. 18/22 4.1 īg“Yż╬Ė┼ę¬ ? īg“Yż╦╩╣ė├żĘż┐╬’╠ÕŻ©Ż╣ĘNŅÉŻ® ╔½Ż©Ż│ĘNŅÉŻ®Ż║│ÓĪó╗Ų╔½ĪóŠv ą╬Ż©Ż│ĘNŅÉŻ®Ż║═ĶĪó╚²ĮŪĪó╦─ĮŪ ? ╠ß╩ŠżĘż┐äėżŁŻ©ŻČĘNŅÉŻ® ? Į³ż┼ż▒żļĪó▀hżČż▒żļĪóż▐ż┐ż░Īó╗žż╣Īó╔Žż▓żļĪóŽ┬ż▓ żļ
- 23. 22/22 5 ż▐ż╚żßż╚šnŅ} ? īg¼FżĄżņż┐źĘź╣źŲźÓ ? ╩┬Ū░ų¬ūRż╬ż╩żżū┤æBż½żķĪó░k▀_Ą─ż╦čįšZ─▄┴”ż“½@Ą├ ? ╚╦ķgż╚ź│ź▀źÕź╦ź▒®`źĘźńź¾żĘż╩ż¼żķĪ󟬟¾źķźżź¾żŪč¦┴Ģ ? ęŖż┐żĻĪó┬äżżż┐żĻż╣żļż│ż╚żŪ░k▀_ż╣żļźĒź▄ź├ź╚ż╬ ūŅ│§ż╬ę╗Üiż“īg¼F ? Į±ßßż╬šnŅ} ? äėū„ż“ēłżõż╣Ż©¼Fį┌żŽŻČĘNŅÉŻ® ? Ė┼─Ņż“ēłżõż╣Ż©¼Fį┌żŽĪó╔½Īóą╬ż╩ż╔Ż┤ĘNŅÉŻ® ? č}ļjż╩╬─Ę©ż╦īØÅĻż╣żļŻ©¼Fį┌żŽĪĖšZĒśĪ╣ż╬ż▀Ż®