Fig p3 18
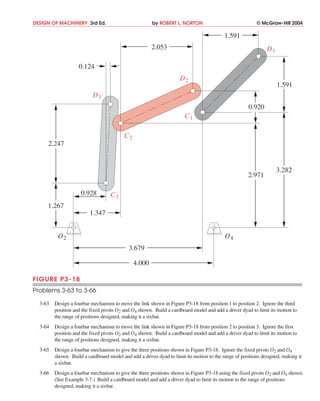
- 1. DESIGN OF MACHINERY 3rd Ed. by ROBERT L. NORTON ÂĐ McGraw-Hill 2004 1.591 2.053 D1 0.124 D2 1.591 D3 0.920 C1 C2 2.247 3.282 2.971 0.928 C3 1.267 1.347 O2 O4 3.679 4.000 FIGURE P3-18 Problems 3-63 to 3-66 3-63 Design a fourbar mechanism to move the link shown in Figure P3-18 from position 1 to position 2. Ignore the third position and the fixed pivots O2 and O4 shown. Build a cardboard model and add a driver dyad to limit its motion to the range of positions designed, making it a sixbar. 3-64 Design a fourbar mechanism to move the link shown in Figure P3-18 from position 2 to position 3. Ignore the first position and the fixed pivots O2 and O4 shown. Build a cardboard model and add a driver dyad to limit its motion to the range of positions designed, making it a sixbar. 3-65 Design a fourbar mechanism to give the three positions shown in Figure P3-18. Ignore the fixed pivots O2 and O4 shown. Build a cardboard model and add a driver dyad to limit its motion to the range of positions designed, making it a sixbar. 3-66 Design a fourbar mechanism to give the three positions shown in Figure P3-18 using the fixed pivots O2 and O4 shown. (See Example 3-7.) Build a cardboard model and add a driver dyad to limit its motion to the range of positions designed, making it a sixbar.