Game Physics Engine Development (Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦ä Ļ░£ļ░£)
ŌĆó
4 likesŌĆó3,011 views

ņØ┤ņĢł ļ░Ćļ¦üĒä┤ ņĀĆ, Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦ä Ļ░£ļ░£ņØä ņØĮĻ│Ā Ļ░£ņØĖ ĒöäļĪ£ņĀØĒŖĖņŚÉ ĻĖ░ņ┤łņĀüņØĖ ļ¼╝ļ”¼ņŚöņ¦äņØä ņĀ£ņ×æĒĢśņŚ¼ ņĀüņÜ®ĒĢ£ Ļ▓ĮĒŚśņØä Ļ│Ąņ£Ā































![ņĀĢļ”¼ĒĢśņ×Éļ®┤ ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēļŗ╣ ņåŹļÅäņØś ļ│ĆĒÖöļŖö ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░
1
ØæÜ
+ ((IŌłÆ1(ØæØ Øæō ├Ś ÓĘ£Øæö)) ├Ś ØæØ Øæō)
CXMFLOAT3 Contact::CalculateFrictionlessImpulse( const CXMFLOAT3X3* inverseInertiaTensor )
{
CXMFLOAT3 deltaVelWorld = XMVector3Cross( m_relativeContactPosition[0], m_contactNormal );
deltaVelWorld = XMVector3TransformNormal( deltaVelWorld, inverseInertiaTensor[0] );
deltaVelWorld = XMVector3Cross( deltaVelWorld, m_relativeContactPosition[0] );
float deltaVelocity = XMVectorGetX( XMVector3Dot( deltaVelWorld, m_contactNormal ) );
deltaVelocity += m_body[0]->GetInverseMass( );
if ( m_body[1] )
{
deltaVelWorld = XMVector3Cross( m_relativeContactPosition[1], m_contactNormal );
deltaVelWorld = XMVector3TransformNormal( deltaVelWorld, inverseInertiaTensor[1] );
deltaVelWorld = XMVector3Cross( deltaVelWorld, m_relativeContactPosition[1] );
deltaVelocity += XMVectorGetX( XMVector3Dot( deltaVelWorld, m_contactNormal ) );
deltaVelocity += m_body[1]->GetInverseMass( );
}
return CXMFLOAT3( m_desiredDeltaVelocity / deltaVelocity, 0.f, 0.f );
}](https://image.slidesharecdn.com/gamephysicsdevelopment-190219132844/85/Game-Physics-Engine-Development-36-320.jpg)

![ļŗżņØī ņĮöļō£ļŖö ØæŻ ØæÄ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ņØä Ļ│äņé░
ØæŻ ØæÄ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ņŚÉņä£ ØæŻ ØæÅ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ļź╝ ļ╣╝ļ®┤ ļČäļ”¼ ņåŹļÅä
CXMFLOAT3 Contact::CalculateLocalVelocity( int bodyIndex, float duration )
{
RigidBody* thisBody = m_body[bodyIndex];
CXMFLOAT3 velocity = XMVector3Cross( thisBody->GetRotation( ), m_relativeContactPosition[bodyIndex] );
velocity += thisBody->GetVelocity( );
CXMFLOAT3 contactVelocity = XMVector3TransformNormal( velocity, XMMatrixTranspose( m_contactToWorld ) );
CXMFLOAT3 accVelocity = thisBody->GetLastFrameAcceleration( ) * duration;
accVelocity = XMVector3TransformNormal( accVelocity, XMMatrixTranspose( m_contactToWorld ) );
accVelocity.x = 0;
contactVelocity += accVelocity;
return contactVelocity;
}
m_contactVelocity = CalculateLocalVelocity( 0, duration );
if ( m_body[1] )
{
m_contactVelocity -= CalculateLocalVelocity( 1, duration );
}
ĒÜīņĀä ņ£ĀļÅä ņåŹļÅä](https://image.slidesharecdn.com/gamephysicsdevelopment-190219132844/85/Game-Physics-Engine-Development-39-320.jpg)
![ļČäļ”¼ ņåŹļÅäļź╝ Ļ│äņé░ĒĢśļ®┤ ╬öØæŻs = ŌłÆ 1 + ØæÉ ØæŻØæĀļź╝ ĒåĄĒĢ┤ ņČ®ļÅī Ēøä ĻĖ░ļīĆļÉśļŖö ņåŹļÅäņØś
ļ│ĆĒÖöļ¤ēņØä Ļ│äņé░ĒĢĀ ņłś ņ׳ņØī
void Contact::CalculateDesiredDeltaVelocity( float duration )
{
constexpr float velocityLimit = 0.25f;
float velocityFromAcc = 0;
if ( m_body[0]->IsAwake( ) )
{
velocityFromAcc += XMVectorGetX( XMVector3Dot( m_body[0]->GetLastFrameAcceleration( ) * duration, m_contactNormal ) );
}
if ( m_body[1] && m_body[1]->IsAwake( ) )
{
velocityFromAcc -= XMVectorGetX( XMVector3Dot( m_body[1]->GetLastFrameAcceleration( ) * duration, m_contactNormal ) );
}
float thisRestitution = m_restitution;
if ( fabsf( m_contactVelocity.x ) < velocityLimit )
{
thisRestitution = 0.f;
}
m_desiredDeltaVelocity = -m_contactVelocity.x - thisRestitution * ( m_contactVelocity.x - velocityFromAcc );
}](https://image.slidesharecdn.com/gamephysicsdevelopment-190219132844/85/Game-Physics-Engine-Development-40-320.jpg)

![4. ņČ®Ļ▓®ļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ņäĀ ņä▒ļČäĻ│╝ Ļ░ü ņä▒ļČäņØä ļČäļ”¼ĒĢśĻ│Ā ņØ┤ļź╝ Ļ░üĻ░üņØś ļ¼╝ņ▓┤ņŚÉ
ļ░śņśü
ņĢ×ņŚÉņä£ ļŗżļżśļŹś Ļ│ĄņŗØņØä ļ¢Āņś¼ļ”¼ļ®░ ņĮöļō£ļź╝ ļ│┤ļ®┤ŌĆ”
CXMFLOAT3 impulsiveTorque = XMVector3Cross( m_relativeContactPosition[0], impulse );
rotationChange[0] = XMVector3TransformCoord( impulsiveTorque, inverseInertiaTensor[0] );
velocityChange[0] = impulse * m_body[0]->GetInverseMass( );
m_body[0]->AddVelocity( velocityChange[0] );
m_body[0]->AddRotation( rotationChange[0] );
if ( m_body[1] )
{
impulsiveTorque = XMVector3Cross( impulse, m_relativeContactPosition[1] );
rotationChange[1] = XMVector3TransformCoord( impulsiveTorque, inverseInertiaTensor[1] );
velocityChange[1] = impulse * -m_body[1]->GetInverseMass( );
m_body[1]->AddVelocity( velocityChange[1] );
m_body[1]->AddRotation( rotationChange[1] );
}
ŌłåØæŻ =
Øæö
ØæÜ
ŌłåØ£ö = (IŌłÆ1(ØæØ Øæō ├Ś ÓĘ£Øæö))
ņ×æņÜ® ļ░śņ×æņÜ®ņØś ļ▓Ģņ╣ÖņŚÉ ļö░ļØ╝ ļ░®Ē¢źļ¦ī ļ░śļīĆļĪ£ ļ░öĻ┐öņä£ ņĀüņÜ®ĒĢ£ļŗż.](https://image.slidesharecdn.com/gamephysicsdevelopment-190219132844/85/Game-Physics-Engine-Development-42-320.jpg)





![ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņ×ÉņŗØ ļģĖļō£Ļ░ä ņČ®ļÅī Ļ░ĆļŖźņä▒ņØä Ļ▓Ćņé¼ĒĢśļÅäļĪØ ņłśņĀĢ.
template <typename BoundingVolumeClass, typename RigidBody>
unsigned int BVHNode<BoundingVolumeClass, RigidBody>::GetPotentialContactsWith( const BVHNode<BoundingVolumeClass, RigidBody>* other, PotentialContact<RigidBody>* contacts,
unsigned int limit ) const
{
if ( Overlaps( other ) == false || limit == 0 )
{
return 0;
}
if ( IsLeaf( ) && other->IsLeaf( ) )
{
contacts->m_body[0] = m_body;
contacts->m_body[1] = other->m_body;
return 1;
}
if ( other->IsLeaf( ) || ( ( IsLeaf( ) == false ) && m_volume.GetSize( ) >= other->m_volume.GetSize( ) ) )
{
unsigned int count = m_children[0]->GetPotentialContactsWith( m_children[1], contacts, limit );
if ( limit > count )
{
count += m_children[0]->GetPotentialContactsWith( other, contacts + count, limit - count );
}
if ( limit > count )
{
count += m_children[1]->GetPotentialContactsWith( other, contacts + count, limit - count );
}
return count;
}
// ņāØļץŌĆ”
}](https://image.slidesharecdn.com/gamephysicsdevelopment-190219132844/85/Game-Physics-Engine-Development-49-320.jpg)

Game Physics Engine Development (Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦ä Ļ░£ļ░£)
- 1. Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦ä Ļ░£ļ░£
- 2. ŌĆśĻ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦ä Ļ░£ļ░£ŌĆÖņØ┤ļØ╝ļŖö ņ▒ģņØä ļö░ļØ╝ņä£ Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦äņØä ņĀ£ņ×æĒĢśņŚ¼ Ļ░£ņØĖ ĒöäļĪ£ņĀØĒŖĖņŚÉ ņĀüņÜ®ĒĢ┤ļ│Ė Ļ▓ĮĒŚśņØä Ļ│Ąņ£Ā 2007ļģäļÅäņŚÉ ņČ£Ļ░ä, 2016ļģäļÅäņŚÉ ļ▓łņŚŁļÉ£ ņ▒ģņØ┤Ļ│Ā ņØ┤ ņ▒ģņØä ĻĖ░ļ░śņ£╝ļĪ£ ļ░£Ēæ£ĒĢ£ 12ļģäļÅä NDC ļ░£Ēæ£ ņ×ÉļŻīļÅä ņ׳ņØī (/ohyecloudy/ndc12-12668524)
- 3. ĻĄŁļé┤ ļ▓łņŚŁņä£ ņżæ ĻĖ░ņ┤łņĀüņØ┤ņ¦Ćļ¦ī ņÖäņä▒ļÉ£ ĒśĢĒā£ņØś ļ¼╝ļ”¼ ņŚöņ¦ä ņĮöļō£ļź╝ ņĀ£Ļ│ĄĒĢśļŖö ņ£ĀņØ╝ĒĢ£ ņ▒ģ ( ŌĆ”ņØ┤ļØ╝Ļ│Ā ņāØĻ░ü. ļŗżļźĖ ņ▒ģņØ┤ ņ׳ļŗżļ®┤ ņĢīļĀżņŻ╝ņäĖņÜö. ) ņøÉņä£Ļ╣īņ¦Ć ĒżĒĢ©ĒĢśļ®┤ ļ╣äĻĄÉņĀü ņĄ£ĻĘ╝ņŚÉ ņČ£Ļ░äļÉ£ ŌĆśGame Physics CookbookŌĆÖ ņØ┤ ņś©ņĀäĒĢ£ ļ¼╝ļ”¼ ņŚöņ¦ä ņĮöļō£ļź╝ ņĀ£Ļ│ĄĒĢśļŖö Ļ▓āņ£╝ļĪ£ ļ│┤ņ×ä
- 4. ĻĄ¼ĒśäĒĢśņŚ¼ ĒöäļĪ£ņĀØĒŖĖņŚÉ ņĀüņÜ®ĒĢ£ ļ¬©ņŖĄņØĆ ļīĆļץ ļŗżņØīĻ│╝ Ļ░ÖņØī.gif Source code (https://github.com/xtozero/SSR/tree/experimental)
- 5. ļ¼╝ļ”¼ļŖö ļ¦żņÜ░ Ļ┤æļ▓öņ£äĒĢ£ ņśüņŚŁņØä ļŗżļŻ©ļŖö ĒĢÖļ¼Ė ņ£äĒéżņŚÉņä£ ļ¼╝ļ”¼ĒĢÖņØś ĒĢĄņŗ¼ ņØ┤ļĪĀņØä ņé┤ĒÄ┤ļ│┤ļ®┤ Q. ĻĘĖļ¤╝ Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦äņØ┤ ļŗżļŻ©ļŖö ņśüņŚŁņØĆ ņ¢┤ļööņØĖĻ░Ć? A. Ļ│ĀņĀäņŚŁĒĢÖ
- 6. Ļ│ĀņĀä ņŚŁĒĢÖņØĆ ļ¼╝ņ▓┤ņŚÉ ņ×æņÜ®ĒĢśļŖö ĒלĻ│╝ ņÜ┤ļÅÖņØś Ļ┤ĆĻ│äļź╝ ņäżļ¬ģ ņ”ē Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦äņØĆ Ļ▓īņ×ä ļ¼╝ņ▓┤ņŚÉ ĒלņØä ņ×æņÜ® Ē¢łņØä ļĢī ļ¼╝ņ▓┤Ļ░Ć ņ¢┤ļ¢╗Ļ▓ī ņøĆņ¦üņØ┤ ļŖöņ¦Ćļź╝ ņŗ£ļ«¼ļĀłņØ┤ņģś ĒĢ© ļ¼╝ņ▓┤ļŖö ĒśĢĒā£Ļ░Ć Ļ│ĀņĀĢļÉśņ¢┤ ļ│ĆĒĢśņ¦Ć ņĢŖļŖö Ļ░Ģņ▓┤(Rigid Body), ĒśĢĒā£Ļ░Ć ļ│ĆĒśĢļÉśļŖö ņŚ░ņ▓┤(Soft Body)ļź╝ ņŻ╝ļĪ£ ļŗżļŻ©ļŖöļŹ░ ņŚ¼ĻĖ░ņä£ļŖö Ļ░Ģņ▓┤ļ¦ī ļŗżļŻĖ
- 8. Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØĆ Ēü¼Ļ▓ī ļ│æņ¦ä ņÜ┤ļÅÖ(Translational Motion)Ļ│╝ ĒÜīņĀä ņÜ┤ļÅÖ (Rotational Motion)ņ£╝ļĪ£ ļéśļēĀ ņłś ņ׳ņØī ļ│æņ¦ä ņÜ┤ļÅÖņØĆ ļ¬©ļōĀ ņ¦łņĀÉļōżņØ┤ ĒÅēĒ¢ēĒĢśĻ▓ī ļÅÖņØ╝ Ļ▒░ļ”¼ļź╝ ņøĆņ¦üņØ┤ļŖö ņÜ┤ļÅÖ ļ│æņ¦ä ņÜ┤ļÅÖņØś Ļ▓░Ļ│╝ļĪ£ ļ¼╝ņ▓┤ņØś ņ£äņ╣ś(ØæØ)Ļ░Ć ļ│ĆĒĢśĻ▓ī ļÉ£ļŗż
- 9. ļ¼╝ņ▓┤Ļ░Ć ņ¢╝ļ¦łļéś ļ╣Āļź┤Ļ▓ī ņØ┤ļÅÖĒĢśņśĆļŖöņ¦Ćļź╝ ļ¼╝ņ▓┤ņØś ņ£äņ╣ś ļ│ĆĒÖöļź╝ ņŗ£Ļ░ä Ļ░äĻ▓®ņ£╝ļĪ£ ļéśļłĀ Ēæ£ĒśäĒĢśļŖöļŹ░ ņØ┤Ļ▓āņØ┤ ņåŹļÅä( į”ØæŻ) ņŗ£Ļ░ä Ļ░äĻ▓®ņŚÉ ļö░ļØ╝ ņåŹļÅäĻ░Ć ļ│ĆĒĢśļŖö ņĀĢļÅäļź╝ ļéśĒāĆļé┤ļŖö ļ¼╝ļ”¼ļ¤ēļÅä ņ׳ļŖöļŹ░ ļ░öļĪ£ Ļ░ĆņåŹļÅä( į”ØæÄ) į”ØæŻ = lim ŌłåØæĪŌåÆ0 ŌłåØæź ŌłåØæĪ = ØææØæź ØææØæĪ = ßłČØæØ į”ØæÄ = lim ŌłåØæĪŌåÆ0 ŌłåØæŻ ŌłåØæĪ = ØææØæŻ ØææØæĪ = ßłĘØæØ
- 10. ļē┤Ēä┤ ņÜ┤ļÅÖ ņĀ£ 2ļ▓Ģņ╣ÖņØä ĒåĄĒĢ┤ņä£ ĒלĻ│╝ ļ¼╝ņ▓┤ņØś ņÜ┤ļÅÖ Ļ┤ĆĻ│äļź╝ ņĀĢļ”¼ĒĢśļ®┤ŌĆ” į”ØÉ╣ļŖö ļ¼╝ņ▓┤ņŚÉ ņ×æņÜ®ĒĢśļŖö Ēל, ØæÜņØĆ ļ¼╝ņ▓┤ņØś ņ¦łļ¤ē ņ”ē ĒלņØĆ ļ¼╝ņ▓┤ņØś Ļ░ĆņåŹļÅäļź╝ ļ│ĆĒÖöņŗ£ĒéżĻ│Ā Ļ░ĆņåŹļÅäļŖö ņåŹļÅäļź╝ ņåŹļÅäļŖö ļ¼╝ņ▓┤ņØś ņ£äņ╣ś ļź╝ ļ│ĆĒÖö ņ¦łļ¤ēņØĆ ĒלņŚÉ ņĀĆĒĢŁĒĢśļŖö ņĀĢļÅäļØ╝Ļ│Ā ņāØĻ░üĒĢĀ ņłś ņ׳ņØī į”ØÉ╣ = Øææ ØææØæĪ (ØæÜ į”ØæŻ) = ØæÜ ØææØæŻ ØææØæĪ = ØæÜ į”ØæÄ
- 11. ĒÜīņĀäņÜ┤ļÅÖņØĆ ņ¢┤ļ¢ż ĻĖ░ņżĆ ņČĢņØä ņżæņŗ¼ņ£╝ļĪ£ ļ¼╝ņ▓┤Ļ░Ć ļÅäļŖö ņÜ┤ļÅÖ ļ│æņ¦äņÜ┤ļÅÖņ£╝ļĪ£ ļ¼╝ņ▓┤ņØś ņ£äņ╣śĻ░Ć ļ│ĆĒĢśļō» ĒÜīņĀäņÜ┤ļÅÖņØä ĒĢśļ®┤ ļ¼╝ņ▓┤ņØś Ļ░üļÅä(Ø£ā) Ļ░Ć ļ│ĆĒĢ© Ø£ā
- 12. ņåŹļÅäņÖĆ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ļ¼╝ņ▓┤ņØś Ļ░üļÅäĻ░Ć ņ¢╝ļ¦łļéś ļ╣Āļź┤Ļ▓ī ļ│ĆĒ¢łļŖöņ¦Ćļź╝ ĒŖ╣ņĀĢ ņŗ£Ļ░ä Ļ░ä Ļ▓®ļÅÖņĢł Ļ░üņØ┤ ļ│ĆĒĢ£ ņĀĢļÅäļĪ£ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŖöļŹ░ ņØ┤Ļ▓āņØ┤ Ļ░üņåŹļÅä(Ø£ö) Ļ░üņåŹļÅäĻ░Ć ņ¢╝ļ¦łļéś ļ╣Āļź┤Ļ▓ī ļ│ĆĒĢśļŖöņ¦Ćļź╝ ļéśĒāĆļé┤ļŖö ļ¼╝ļ”¼ļ¤ēļÅä Ļ░ĆņåŹļÅäņÖĆ ļ¦łņ░¼Ļ░Ć ņ¦ĆļĪ£ ņĪ┤ņ×¼ĒĢśļŖöļŹ░ ņØ┤Ļ▓āņØ┤ Ļ░üĻ░ĆņåŹļÅä(Øø╝) Ø£ö = lim ŌłåØæĪŌåÆ0 ŌłåØ£ā ŌłåØæĪ = ØææØ£ā ØææØæĪ = ßłČØ£ā į”Øø╝ = lim ŌłåØæĪŌåÆ0 ŌłåØ£ö ŌłåØæĪ = ØææØ£ö ØææØæĪ = ßłĘØ£ā
- 13. ņØ┤ņĀ£ ĒלĻ│╝ ĒÜīņĀäņÜ┤ļÅÖņØś Ļ┤ĆĻ│äļź╝ ņé┤ĒÄ┤ļ│╝ ņłś ņ׳ņØī, ĒÜīņĀäņÜ┤ļÅÖņŚÉņä£ ļ¼╝ņ▓┤ļź╝ ĒÜīņĀäņŗ£ ĒéżļŖö ĒÜ©ļĀźņØä ļ░£ņāØĒĢśļŖö ĒלņØĆ ĒåĀĒü¼(į”Ø£Å)ļØ╝Ļ│Ā ĒĢśļ®░ ļ│æņ¦äņÜ┤ļÅÖņŚÉņä£ ņé┤ĒÄ┤ļ│Ė Ēל į”ØÉ╣Ļ│╝ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņŚ░Ļ┤Ć ļÉ© ņŚ¼ĻĖ░ņä£ ØæØ ØæōņØĆ ĒלņØ┤ ņĀüņÜ®ļÉśļŖö ņ¦ĆņĀÉņØ┤ļ®░, ļ¼╝ņ▓┤ņØś ņżæņŗ¼(ļīĆņ▓┤ļĪ£ ļ¼┤Ļ▓ī ņżæņŗ¼)ņØä ĻĖ░ ņżĆņ£╝ļĪ£ ņāüļīĆņĀüņØĖ ņ£äņ╣ś, aļŖö ĒåĀĒü¼ņØś Ēü¼ĻĖ░, ßłśØææļŖö ĒåĀĒü¼Ļ░Ć ņ×æņÜ®ĒĢśļŖö ĒÜīņĀäņČĢņØś ļ░® Ē¢ź į”أŠ= ØæØ Øæō ├Ś į”ØÉ╣=a ßłśØææ į”ØÉ╣ ØæØ Øæō
- 14. ņłśĒĢÖņ×É ņśżņØ╝ļ¤¼Ļ░Ć ļ│æņ¦äņÜ┤ļÅÖņŚÉņä£ņØś ļē┤Ēä┤ ņÜ┤ļÅÖ ņĀ£ 2ļ▓Ģņ╣ÖĻ│╝ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ĒÜīņĀäņŚÉ ļīĆĒĢ£ ļē┤Ēä┤ ņÜ┤ļÅÖ ņĀ£ 2ļ▓Ģņ╣ÖņØä ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀ£ņŗ£ ØÉ╝ ļŖö Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖļĪ£ ŌĆśļ¼╝ņ▓┤ņØś ĒÜīņĀä ņåŹļÅäļź╝ ņ¢╝ļ¦łļéś ļ│ĆĒÖöņŗ£ĒéżĻĖ░ ņ¢┤ļĀżņÜ┤Ļ░Ć?ŌĆÖļź╝ ļéśĒāĆļé┤ļ®░ ļē┤Ēä┤ ņÜ┤ļÅÖ ņĀ£ 2ļ▓Ģņ╣ÖņØś ņ¦łļ¤ēĻ│╝ Ļ░ÖļŗżĻ│Ā ņāØĻ░üĒĢśļ®┤ ļÉ© Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖļŖö ņČĢņØ┤ ņŻ╝ņ¢┤ņĪīņØä ļĢī ļ¼╝ņ▓┤ļź╝ ņØ┤ļŻ©ļŖö ņĢīĻ░▒ņØ┤ļōżņŚÉ ļīĆĒĢśņŚ¼ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░ĒĢĀ ņłś ņ׳ņØī ØæøņØĆ ņĢīĻ░▒ņØ┤ņØś Ļ░£ņłś, Øææ ØæØØæ¢ŌåÆØæÄļŖö ĒÜīņĀäņČĢ ØæÄļĪ£ ļČĆĒä░ņØś Ļ▒░ļ”¼ ØÉ╝ ØæÄļŖö ĒÜīņĀäņČĢ ØæÄļź╝ ĻĖ░ ņżĆņ£╝ļĪ£ ĒĢ£ Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖ į”أŠ= ØÉ╝ į”Øø╝ ØÉ╝ ØæÄ = ÓĘŹ Øæ¢=1 Øæø ØæÜØæ¢ Øææ ØæØØæ¢ŌåÆØæÄ 2
- 15. Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖļŖö ņ¦łļ¤ēĻ│╝ Ļ░ÖņØ┤ ļŗ©ņØ╝ ņłśņ╣śļĪ£ ļéśĒāĆļé╝ ņłś ņŚåĻ│Ā ĒÜīņĀäņČĢņŚÉ ļö░ļØ╝ ļŗ¼ļØ╝ņ¦É ĒÜīņĀäņČĢņØä ņĀĢĒĢśļ®┤ ļŗ© ĒĢśļéśņØś Ļ░Æņ£╝ļĪ£ ņ¢╗ņ¢┤ņ¦ĆĻ▓Āņ¦Ćļ¦ī ĒÜīņĀäņČĢņØĆ ņ×äņØśļĪ£ ņ×ĪļŖö Ļ▓āņØ┤ Ļ░ĆļŖź Q. ĻĘĖļ¤╝ ļ¼┤ĒĢ£Ē׳ ļ¦ÄņØĆ Ļ░ÆņØä Ļ░¢Ļ│Ā ļŗżļģĆņĢ╝ ĒĢśļŖöĻ░Ć? A. ņĢäļŗłļŗż. ļ¬©ļōĀ Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖņØś Ļ░ÆņØä Ļ┤Ćņä▒ ĒģÉņä£(Inertia tensor)ļØ╝ļŖö Ē¢ēļĀ¼ņŚÉ ņ▒äņøī ļäŻņØä ņłś ņ׳ļŗż.
- 16. ĒģÉņä£? Ē¢ēļĀ¼ņØä ņóĆ ļŹö ņØ╝ļ░śĒÖö ĒĢ£ Ļ▓ā 0ņ░© ĒģÉņä£Ļ░Ć ņŖżņ╣╝ļØ╝, 1ņ░©Ļ░Ć ļ▓ĪĒä░, 2ņ░©Ļ░Ć Ē¢ēļĀ¼ņØ┤ļØ╝Ļ│Ā ņāØĻ░üĒĢĀ ņłś ņ׳ņØī 3ņ░©ņøÉ Ļ│ĄĻ░äņŚÉņä£ Ļ░Ģņ▓┤ņØś Ļ┤Ćņä▒ ĒģÉņä£(Inertia Tensor)ļŖö 3 x 3 Ē¢ēļĀ¼ ļīĆĻ░üņäĀ ļ░®Ē¢ź ņøÉņåīļŖö XņČĢ, YņČĢ, ZņČĢ ņżæņŗ¼ņ£╝ļĪ£ ĒÜīņĀäĒĢĀ ļĢī Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖ ØÉ╝ Øæź ļŖö XņČĢņØä ņżæņŗ¼ņ£╝ļĪ£ ĒÜīņĀäĒĢĀ ļĢīņØś Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖņØ┤ļŗż. ØÉ╝ Øæ”, ØÉ╝Øæ¦ļÅä ļ¦łņ░¼Ļ░Ćņ¦Ć ØÉ╝ Øæź ØÉ╝ Øæ” ØÉ╝Øæ¦
- 17. Ē¢ēļĀ¼ņØś ļéśļ©Ėņ¦Ć ņøÉņåīļŖö Ļ┤Ćņä▒Ļ│▒(product of inertia)ņØ┤ļØ╝Ļ│Ā ĒĢśļ®░ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢņØś ØæÄ ØæØ Øæ¢ ļŖö ļ¼╝ņ▓┤ņØś ļ¼┤Ļ▓īņżæņŗ¼ņ£╝ļĪ£ļČĆĒä░ Øæ¢ļ▓łņ¦Ė ĒīīĒŗ░Ēü┤Ļ╣īņ¦ĆņØś Ļ▒░ļ”¼ņØś ØæÄņČĢ ļ░®Ē¢ź ņä▒ļČä Ļ┤Ćņä▒ ļ¬©ļ®śĒŖĖņÖĆ ļŗ¼ļ”¼ Ļ┤Ćņä▒Ļ│▒ņØĆ ņØīņłś Ļ░ÆņØ┤ ļéśņś¼ ņłś ņ׳ņØī, ņø¼ļ¦īĒĢ£ ļ¼╝ņ▓┤ļŖö ļīĆļČĆļČä ņØ┤ Ļ░ÆņØ┤ 0 Ļ┤Ćņä▒Ļ│▒ņØä Ļ┤Ćņä▒ ĒģÉņä£ņŚÉ ļäŻņ¢┤ņŻ╝ļ®┤ ņ×ÉļŻī ĻĄ¼ņĪ░Ļ░Ć ņÖäņä▒ ØÉ╝ ØæÄØæÅ = ÓĘŹ Øæ¢=1 Øæø ØæÜØæ¢ ØæÄ ØæØ Øæ¢ ØæÅ ØæØ Øæ¢
- 18. ļŗżņłśņØś ļ¼╝ņ▓┤ļōżņØĆ Ļ┤Ćņä▒ ĒģÉņä£ļź╝ ņēĮĻ▓ī Ļ│äņé░ĒĢĀ ņłś ņ׳ļŖö ņŗØņØ┤ ņĪ┤ņ×¼, ļŗżņØīņØĆ ņ£Īļ®┤ņ▓┤ ļĖöļĪØņØś Ļ┤Ćņä▒ ĒģÉņä£ ļŗżļźĖ ĒśĢĒā£ņØś ļ¼╝ņ▓┤ņŚÉ ļīĆĒĢ£ Ļ┤Ćņä▒ ĒģÉņä£ļŖö ņŚ¼ĻĖ░ļź╝ ņ░ĖĻ│Ā https://en.wikipedia.org/wiki/List_of_moments_of_inertia#List_of_3D _inertia_tensors ØÉ╝ = ØÉ╝ Øæź ŌłÆØÉ╝ ØæźØæ” ŌłÆØÉ╝ ØæźØæ¦ ŌłÆØÉ╝ ØæźØæ” ØÉ╝ Øæ” ŌłÆØÉ╝ Øæ”Øæ¦ ŌłÆØÉ╝ ØæźØæ¦ ŌłÆØÉ╝ Øæ”Øæ¦ ØÉ╝Øæ¦ ØÉ╝ = 1 12 ØæÜ(Øææ Øæ” 2 + Øææ Øæ¦ 2) 0 0 0 1 12 ØæÜ(Øææ Øæź 2 + Øææ Øæ¦ 2) 0 0 0 1 12 ØæÜ(Øææ Øæź 2 + Øææ Øæ” 2)
- 19. ņØ┤ņĀ£ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØä Ļ│äņé░ĒĢśļŖö ĒĢ©ņłś Integrateļź╝ ņé┤ĒÄ┤ļ│┤ļ®┤ŌĆ” void RigidBody::Integrate( float duration ) { m_lastFrameAcceleration = m_acceleration; m_lastFrameAcceleration += m_forceAccum * m_inverseMass; CXMFLOAT3 angularAcceleration = XMVector3TransformNormal( m_torqueAccum, m_inverseInertiaTenserWorld ); m_velocity += m_lastFrameAcceleration * duration; m_rotation += angularAcceleration * duration; m_velocity *= powf( m_linearDamping, duration ); m_rotation *= powf( m_angularDamping, duration ); m_position += m_velocity * duration; CXMFLOAT4 dq = m_rotation * duration; dq = XMQuaternionMultiply( m_orientation, dq ) * 0.5f; m_orientation += dq; } į”ØÉ╣ = ØæÜ į”ØæÄ į”ØæÄ = 1 ØæÜ į”ØÉ╣
- 20. ņØ┤ņĀ£ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØä Ļ│äņé░ĒĢśļŖö ĒĢ©ņłś Integrateļź╝ ņé┤ĒÄ┤ļ│┤ļ®┤ŌĆ” void RigidBody::Integrate( float duration ) { m_lastFrameAcceleration = m_acceleration; m_lastFrameAcceleration += m_forceAccum * m_inverseMass; CXMFLOAT3 angularAcceleration = XMVector3TransformNormal( m_torqueAccum, m_inverseInertiaTenserWorld ); m_velocity += m_lastFrameAcceleration * duration; m_rotation += angularAcceleration * duration; m_velocity *= powf( m_linearDamping, duration ); m_rotation *= powf( m_angularDamping, duration ); m_position += m_velocity * duration; CXMFLOAT4 dq = m_rotation * duration; dq = XMQuaternionMultiply( m_orientation, dq ) * 0.5f; m_orientation += dq; } į”أŠ= ØÉ╝ į”Øø╝ į”Øø╝ = ØÉ╝ŌłÆ1 į”Ø£Å
- 21. ņØ┤ņĀ£ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØä Ļ│äņé░ĒĢśļŖö ĒĢ©ņłś Integrateļź╝ ņé┤ĒÄ┤ļ│┤ļ®┤ŌĆ” void RigidBody::Integrate( float duration ) { m_lastFrameAcceleration = m_acceleration; m_lastFrameAcceleration += m_forceAccum * m_inverseMass; CXMFLOAT3 angularAcceleration = XMVector3TransformNormal( m_torqueAccum, m_inverseInertiaTenserWorld ); m_velocity += m_lastFrameAcceleration * duration; m_rotation += angularAcceleration * duration; m_velocity *= powf( m_linearDamping, duration ); m_rotation *= powf( m_angularDamping, duration ); m_position += m_velocity * duration; CXMFLOAT4 dq = m_rotation * duration; dq = XMQuaternionMultiply( m_orientation, dq ) * 0.5f; m_orientation += dq; } į”ØæÄ = lim ŌłåØæĪŌåÆ0 ŌłåØæŻ ŌłåØæĪ = ØææØæŻ ØææØæĪ = ßłĘØæØ į”Øø╝ = lim ŌłåØæĪŌåÆ0 ŌłåØ£ö ŌłåØæĪ = ØææØ£ö ØææØæĪ = ßłĘØ£ā
- 22. ņØ┤ņĀ£ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØä Ļ│äņé░ĒĢśļŖö ĒĢ©ņłś Integrateļź╝ ņé┤ĒÄ┤ļ│┤ļ®┤ŌĆ” void RigidBody::Integrate( float duration ) { m_lastFrameAcceleration = m_acceleration; m_lastFrameAcceleration += m_forceAccum * m_inverseMass; CXMFLOAT3 angularAcceleration = XMVector3TransformNormal( m_torqueAccum, m_inverseInertiaTenserWorld ); m_velocity += m_lastFrameAcceleration * duration; m_rotation += angularAcceleration * duration; m_velocity *= powf( m_linearDamping, duration ); m_rotation *= powf( m_angularDamping, duration ); m_position += m_velocity * duration; CXMFLOAT4 dq = m_rotation * duration; dq = XMQuaternionMultiply( m_orientation, dq ) * 0.5f; m_orientation += dq; } į”ØæŻ = lim ŌłåØæĪŌåÆ0 ŌłåØæź ŌłåØæĪ = ØææØæź ØææØæĪ = ßłČØæØ Ø£ö = lim ŌłåØæĪŌåÆ0 ŌłåØ£ā ŌłåØæĪ = ØææØ£ā ØææØæĪ = ßłČØ£ā
- 23. ņČ®ļÅī Ēøä Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖ
- 24. ņŚ¼ĻĖ░Ļ╣īņ¦ĆĻ░Ć ĒלņŚÉ ņØśĒĢ£ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖ Ļ░Ģņ▓┤ņŚÉ ņ×æņÜ®ĒĢśļŖö ļ¼╝ļ”¼ņĀü ĒśäņāüņØ┤ ņś©ņĀäĒ׳ ĒלņŚÉ ņØśĒĢ£ Ļ▓āņØĆ ņĢäļŗś Ļ░Ģņ▓┤ļŖö ņÜ┤ļÅÖņØä ĒåĄĒĢ┤ņä£ ļŗżļźĖ Ļ░Ģņ▓┤ņÖĆ ļČĆļö¬Ē×É ņłś ļÅä ņ׳ņØī ļ¼╝ņ▓┤Ļ░Ć ņä£ļĪ£ņØś ņÜ┤ļÅÖņŚÉ Ļ░äņäŁĒĢśļŖö ĒśäņāüņØ┤ ņČ®ļÅī ĻĘĖļ¤╝ ņČ®ļÅīņØ┤ ļ░£ņāØ Ē¢łņØä Ļ▓ĮņÜ░ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØ┤ ņ¢┤ļ¢╗Ļ▓ī ļ│ĆĒĢśļŖöĻ░Ć?
- 25. ņÜ┤ļÅÖļ¤ē ļ│┤ņĪ┤ ļ▓Ģņ╣ÖņŚÉ ļö░ļź┤ļ®┤ ņÖĖļČĆņŚÉņä£ ĒלņØ┤ Ļ░ĆĒĢ┤ņ¦Ćņ¦Ć ņĢŖļŖöļŗżļ®┤ ļē┤Ēä┤ņØś ņÜ┤ļÅÖ ļ▓Ģņ╣ÖņŚÉ ļö░ļØ╝ ņ┤Ø ņÜ┤ļÅÖļ¤ēņØĆ ļ░öļĆīņ¦Ć ņĢŖņØī ļæÉ ļ¼╝ņ▓┤Ļ░Ć ņČ®ļÅīĒĢĀ ļĢī ļæÉ ļ¼╝ņ▓┤ņØś ņÜ┤ļÅÖļ¤ēņØś ĒĢ®ņØĆ ņØ╝ņĀĢ ņŚ¼ĻĖ░ņä£ ØæŻØæ¢ ļŖö ņČ®ļÅī ņĀä ņåŹļÅä ØæŻØæ¢ ŌĆÖ ļŖö ņČ®ļÅī Ēøä ņåŹļÅä ļ¼╝ņ▓┤ņØś ņČ®ļÅī ņĀäĒøä ņåŹļÅäņØś ļ╣äņ£©ņØĆ ļ░śļ░£ Ļ│äņłśļØ╝ĒĢśĻ│Ā ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢņØśļÉ© ØæÜ1 ØæŻ1 + ØæÜ2 ØæŻ2 = ØæÜ1 ØæŻ1 ŌĆ▓ + ØæÜ2 ØæŻ2 ŌĆ▓ ØæÉ = ØæŻ2 ŌĆ▓ ŌłÆ ØæŻ1 ŌĆ▓ ØæŻ1 ŌłÆ ØæŻ2 (0 Ōēż ØæÉ Ōēż 1)
- 26. ļ░śļ░£ Ļ│äņłśļŖö 0 ~ 1ņé¼ņØ┤ņØś Ļ░ÆņØä Ļ░Ćņ¦Ćļ®░ 0ņØ╝ Ļ▓ĮņÜ░ ņÖäņĀä ļ╣äĒāäņä▒ ņČ®ļÅī, 1ņØ╝ Ļ▓ĮņÜ░ Ēāäņä▒ ņČ®ļÅī, ĻĘĖ ņÖĖņØś Ļ▓ĮņÜ░ ļ╣äĒāäņä▒ ņČ®ļÅī ņä£ļĪ£ ņĀæĻĘ╝ĒĢśļŖö ļ¼╝ņ▓┤Ļ░Ć ņČ®ļÅīĒ¢łņØä ļĢī ņä£ļĪ£ ļ®Ćņ¢┤ņ¦ĆļŖö ļ░®Ē¢źņ£╝ļĪ£ ņÜ┤ļÅÖ =>Ēāäņä▒, ļ╣äĒāäņä▒ ņČ®ļÅī ļČÖņ¢┤ņä£ Ļ░ÖņØĆ ļ░®Ē¢źņ£╝ļĪ£ ņÜ┤ļÅÖ => ņÖäņĀä ļ╣äĒāäņä▒ ņČ®ļÅī
- 27. ņÜ┤ļÅÖļ¤ē ļ│┤ņĪ┤ ļ▓Ģņ╣ÖņØä ĒåĄĒĢ┤ņä£ ņĢī ņłś ņ׳ļŖö Ļ▓āņØĆ ņČ®ļÅīļĪ£ ņØĖĒĢ┤ņä£ ņåŹļÅäĻ░Ć ļ│ĆĒĢ© ņŚ¼ĻĖ░ņä£ ņČ®Ļ▓®ļ¤ē(Impulse)ņØ┤ļØ╝ļŖö ļ¼╝ļ”¼ļ¤ēņØä ņåīĻ░£ĒĢĀ ĒĢäņÜöĻ░Ć ņ׳ņØī, ņČ®Ļ▓®ļ¤ēņØĆ ņ¢┤ ļ¢ż ņĀĢĒĢ┤ņ¦ä ņŗ£Ļ░ä ļÅÖņĢł ņÜ┤ļÅÖļ¤ēņØ┤ ļ│ĆĒÖöĒĢ£ ņĀĢļÅä ņŚ¼ĻĖ░ņä£ ØæØØæ¢ļŖö ņ¢┤ļ¢ż ļ¼╝ņ▓┤ņØś ņÜ┤ļÅÖļ¤ē ØæĪØæ¢ļŖö ņŗ£Ļ░ä, ņÜ┤ļÅÖļ¤ēņØĆ ļ¼╝ņ▓┤ņØś ņ¦łļ¤ēĻ│╝ ņåŹļÅäņØś Ļ│▒ņ£╝ļĪ£ ļéśĒāĆļé╝ ņłś ņ׳ņ£╝ļ»ĆļĪ£ ņČ®Ļ▓®ļ¤ēņØä ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢļ”¼ĒĢĀ ņłś ņ׳ņØī ØæÜ1 ØæŻ1 + ØæÜ2 ØæŻ2 = ØæÜ1 ØæŻ1 ŌĆ▓ + ØæÜ2 ØæŻ2 ŌĆ▓ Ļ░Ģņ▓┤ņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ņČ®ļÅīĒøäņŚÉļÅä ļ¬©ņ¢æ ņØ┤ļéś Ēü¼ĻĖ░Ļ░Ć ļ│ĆĒśĢļÉśņ¦Ć ņĢŖņØī. ņ¦łļ¤ēņØĆ ļ│ĆĒĢśņ¦Ć ņĢŖņØī. Øæö = ØæØ1 ŌłÆ ØæØ0 = ÓČ▒ ØæĪ0 ØæĪ1 ßłČØæØ ØæĪ ØææØæĪ
- 28. ĻĘĖļ”¼Ļ│Ā ĒלņØ┤ ņŗ£Ļ░äņŚÉ ņØ╝ņĀĢĒĢśļŗżļ®┤ ļŗżņØīĻ│╝ Ļ░ÖņØĆ ņŗØņ£╝ļĪ£ ĒåĄĒĢ┤ ņČ®Ļ▓®ļ¤ēĻ│╝ ĒלņØä ņāüĒśĖ ļ│ĆĒÖś Ļ░ĆļŖź ņØ┤ņĀ£ ņČ®Ļ▓®ļ¤ēĻ│╝ Ēל, ņåŹļÅäĻ░äņØś Ļ┤ĆĻ│äļź╝ ņé┤ĒÄ┤ļ│┤ņĢśļŖöļŹ░ ņ¦ĆĻĖłĻ╣īņ¦Ć ļŗżļŻ¼ ņČ®Ļ▓®ļ¤ēņØĆ ņé¼ņŗż ņäĀ(Linear) ņČ®Ļ▓®ļ¤ēņ£╝ļĪ£ Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØä ļŗżļŻ©ĻĖ░ ņ£äĒĢ┤ņä£ļŖö Ļ░ü(angular) ņČ®Ļ▓®ļ¤ēņØä ņé┤ĒÄ┤ļ│╝ ĒĢäņÜöĻ░Ć ņ׳ņØī Ļ░ü ņČ®Ļ▓®ļ¤ēļÅä ņäĀ ņČ®Ļ▓®ļ¤ēĻ│╝ Ēü¼Ļ▓ī ļŗżļź┤ņ¦Ć ņĢŖņØī Øæö = ØæÜØæŻ1 ŌłÆ ØæÜØæŻ0 = ØæÜŌłåØæŻ Øæö = ØæÜŌłåØæŻ = ØÉ╣ŌłåØæĪ
- 29. Ļ░ü ņČ®Ļ▓®ļ¤ēņØĆ ņ¢┤ļ¢ż ņĀĢĒĢ┤ņ¦ä ņŗ£Ļ░äņĢłņŚÉ Ļ░ü ņÜ┤ļÅÖļ¤ēņØś ļ│ĆĒÖö ņŚ¼ĻĖ░ņä£ Ļ░ü ņÜ┤ļÅÖļ¤ē ØÉ┐ = ØÉ╝Ø£ö ņØ┤ļ»ĆļĪ£ Ļ░ü ņČ®Ļ▓®ļ¤ēņØĆ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ĒåĀĒü¼Ļ░Ć ņŗ£Ļ░äņŚÉ ņØ╝ņĀĢĒĢśļŗżļ®┤ Øæó = Ø£Å╬öØæĪņ£╝ļĪ£ Ēæ£ĻĖ░ĒĢĀ ņłś ņ׳Ļ│Ā ĒåĀĒü¼ ņÖĆ ĒלņØś Ļ┤ĆĻ│ä(į”أŠ= ØæØ Øæō ├Ś į”ØÉ╣) ņŚÉ ņØśĒĢ┤ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņĀĢļ”¼ ļÉ© Øæó = ØÉ╝Ø£ö1 ŌłÆ ØÉ╝Ø£ö0 = ØÉ╝ŌłåØ£ö Øæó = ØæØ Øæō ├Ś Øæö
- 30. ņäĀ ņČ®Ļ▓®ļ¤ēĻ│╝ Ļ░ü ņČ®Ļ▓®ļ¤ēņØä ĻĄ¼ĒĢśļ®┤ ņČ®ļÅīņØ┤ ļ░£Ļ▓¼Ē¢łņØä ļĢī Ļ░Ģņ▓┤ņØś ņÜ┤ļÅÖņØ┤ ņ¢┤ļ¢╗Ļ▓ī ļ│ĆĒĢśļŖöņ¦Ć Ļ│äņé░ĒĢĀ ņłś ņ׳ņØī ņ”ē ļ¼╝ļ”¼ņŚöņ¦äņŚÉņä£ ņČ®ļÅīņØä ĒĢ┤Ļ▓░ĒĢśļŖö Ļ│╝ņĀĢņØĆ ņČ®Ļ▓®ļ¤ēņØä Ļ│äņé░ĒĢśļŖö Ļ│╝ņĀĢ ņČ®Ļ▓®ļ¤ēņØä Ļ│äņé░ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ļ¼╝ņ▓┤ņØś ņČ®ļÅīņØä Ļ▓Ćņé¼ĒĢśļ®┤ņä£ ņČöĻ░ĆņĀüņ£╝ļĪ£ Ļ│äņé░ĒĢ┤ ņĢ╝ ĒĢśļŖö ņĀĢļ│┤Ļ░Ć ļæÉ Ļ░Ćņ¦Ć ņĪ┤ņ×¼ Ļ▓ĮĻ│ä ĻĄ¼(Bounding Sphere)ņØś ņČ®ļÅī Ļ▓Ćņé¼ ņĮöļō£ļź╝ ļ│┤ļ®┤ņä£ ņČöĻ░ĆļĪ£ Ļ│äņé░ĒĢ┤ņĢ╝ ĒĢśļŖö ņĀĢļ│┤Ļ░Ć ļ¼┤ņŚćņØĖņ¦Ć ņé┤ĒÄ┤ļ│┤Ļ▓ĀņØī
- 31. unsigned int SphereAndSphere( const BoundingSphere& lhs, RigidBody* lhsBody, const BoundingSphere& rhs, RigidBody* rhsBody, CollisionData* data ) { if ( data->m_contactsLeft <= 0 ) { return COLLISION::OUTSIDE; } const CXMFLOAT3& lhsPos = lhs.GetCenter( ); const CXMFLOAT3& rhsPos = rhs.GetCenter( ); CXMFLOAT3 midline = lhsPos - rhsPos; float size = XMVectorGetX( XMVector3Length( midline ) ); if ( size <= 0.f || size >= lhs.GetRadius( ) + rhs.GetRadius( ) ) { return COLLISION::OUTSIDE; } CXMFLOAT3 normal = midline / size; Contact* contact = data->m_contacts; contact->SetContactNormal( normal ); contact->SetContactPoint( lhsPos - CXMFLOAT3( midline * 0.5f ) ); contact->SetPenetration( lhs.GetRadius( ) + rhs.GetRadius( ) - size ); contact->SetBodyData( lhsBody, rhsBody, data->m_friction, data->m_restitution ); data->AddContacts( 1 ); return COLLISION::INTERSECTION; } GetCenter() midline ņČ®ļÅīņŚ¼ļČĆ ĒīÉļŗ© ņČöĻ░Ć ņĀĢļ│┤ Ļ│äņé░ ??? ļæÉ Ļ░Ćņ¦ĆļØ╝Ļ│Ā Ē¢łļŖöļŹ░ ņäĖ Ļ░Ćņ¦Ć?
- 32. 1. Contact Normal : ņČ®ļÅī ņĀÉņŚÉņä£ņØś ļ▓ĢņäĀ ļ▓ĪĒä░ 2. Contact Point : ņČ®ļÅī ņĀÉ ļ▓łņÖĖ. Penetration : Ļ┤ĆĒåĄ Ļ╣ŖņØ┤ (Ļ▓╣ņ╣© ĒĢ┤ņåī Ļ│╝ņĀĢņŚÉņä£ ĒĢäņÜö, ņČ®Ļ▓®ļ¤ē Ļ│äņé░ņŚÉņä£ ļŖö ņé¼ņÜ® X)
- 33. ļæÉ Ļ░Ćņ¦Ć ņČöĻ░Ć ņĀĢļ│┤ļź╝ Ļ░Ćņ¦ĆĻ│Ā ļŗżņØīĻ│╝ Ļ░ÖņØĆ ņł£ņä£ļĪ£ ņČ®Ļ▓®ļ¤ēņØä Ļ│äņé░ 1. ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēļŗ╣ ņåŹļÅäņØś ļ│ĆĒÖöļź╝ Ļ│äņé░ 2. ĻĖ░ļīĆļÉśļŖö ņåŹļÅäņØś ļ│ĆĒÖöļ¤ēņØä Ļ│äņé░ 3. ņÜöĻĄ¼ļÉśļŖö ņåŹļÅä ļ│ĆĒÖöļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ļ░£ņāØĒĢ┤ņĢ╝ ĒĢśļŖö ņČ®Ļ▓®ļ¤ēņØä Ļ│äņé░ 4. ņČ®Ļ▓®ļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ņäĀ ņä▒ļČäĻ│╝ Ļ░ü ņä▒ļČäņØä ļČäļ”¼ĒĢśĻ│Ā ņØ┤ļź╝ Ļ░üĻ░üņØś ļ¼╝ņ▓┤ņŚÉ ļ░śņśü
- 34. 1. ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēļŗ╣ ņåŹļÅäņØś ļ│ĆĒÖöļź╝ Ļ│äņé░ Q. ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēļŗ╣ ļ░£ņāØĒĢśļŖö ņåŹļÅä ļ│ĆĒÖöļŖö ļ¬ć Ļ░Ćņ¦ĆĻ░Ć ņ׳ļŖöĻ░Ć? A. ļæÉ Ļ░Ćņ¦Ć ņäĀ ņä▒ļČä ņĢ×ņŚÉņä£ ņäĀ ņČ®Ļ▓®ļ¤ēĻ│╝ ņåŹļÅäņØś ļ│ĆĒÖöņØś Ļ┤ĆĻ│äļź╝ ņé┤ĒÄ┤ļ│┤ņĢśņØī ņØ┤ļĢī ņåŹļÅäņØś ļ│ĆĒÖöļŖö ŌłåØæŻ = Øæö ØæÜ , ņ”ē ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ē(ņČ®Ļ▓®ļ¤ēņØś Ēü¼ĻĖ░Ļ░Ć 1)ņŚÉņä£ļŖöŌĆ” Øæö = ØæÜŌłåØæŻ ŌłåØæŻ = 1 ØæÜ
- 35. Ļ░ü ņä▒ļČä Ļ░ü ņČ®Ļ▓®ļ¤ēĻ│╝ Ļ░ü ņåŹļÅäņØś ļ│ĆĒÖöļŖö ļŗżņØīĻ│╝ Ļ░ÖņØī Ļ░ü ņåŹļÅäņØś ļ│ĆĒÖöļŖö ŌłåØ£ö = IŌłÆ1 uļØ╝Ļ│Ā ĒĢĀ ņłś ņ׳ņØī, ņØ┤ņĀ£ ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēņŚÉņä£ Ļ░ü ņČ® Ļ▓®ļ¤ēņØä ĻĄ¼ĒĢśļ®┤ Ļ░ü ņåŹļÅäļź╝ ĻĄ¼ĒĢĀ ņłś ņ׳ņØī ņØ┤ņĀ£ ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēļŗ╣ Ļ░ü ņåŹļÅäņÖĆ ņäĀ ņåŹļÅäļź╝ ĒĢśļéśņØś ņäĀņåŹļÅäļĪ£ ĒåĄĒĢ®ĒĢśļ®┤ ļÉ©, Ļ░ü ņåŹļÅäļĪ£ ņØĖĒĢ┤ ņ£ĀļÅäļÉśļŖö ĒÜīņĀä ņ£ĀļÅä ņåŹļÅä( ßłČØæ×)ļź╝ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░ĒĢĀ ņłś ņ׳ņØī Øæó = ØÉ╝ŌłåØ£ö Øæó = ØæØ Øæō ├Ś ÓĘ£Øæö ßłČØæ× = Ø£ö ├Ś ØæØ Øæō ØæØ Øæō : ļ¼╝ņ▓┤ ļ¼┤Ļ▓īņżæņŗ¼ņŚÉ ļīĆĒĢ£ ņČ®ļÅīņĀÉņØś ņāüļīĆņĀü ņ£äņ╣ś( ņČ®ļÅīņĀÉ ŌĆō ļ¼┤Ļ▓īņżæņŗ¼ ) ÓĘ£Øæö : ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ē ņŚ¼ĻĖ░ņä£ļŖö ņČ®ļÅīņĀÉņŚÉņä£ņØś ļ▓ĢņäĀ ļ▓ĪĒä░ņÖĆ Ļ░Öļŗż.
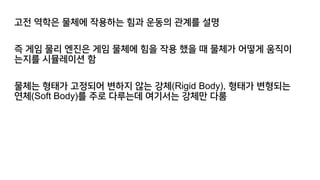
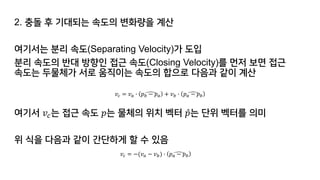
- 36. ņĀĢļ”¼ĒĢśņ×Éļ®┤ ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēļŗ╣ ņåŹļÅäņØś ļ│ĆĒÖöļŖö ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░ 1 ØæÜ + ((IŌłÆ1(ØæØ Øæō ├Ś ÓĘ£Øæö)) ├Ś ØæØ Øæō) CXMFLOAT3 Contact::CalculateFrictionlessImpulse( const CXMFLOAT3X3* inverseInertiaTensor ) { CXMFLOAT3 deltaVelWorld = XMVector3Cross( m_relativeContactPosition[0], m_contactNormal ); deltaVelWorld = XMVector3TransformNormal( deltaVelWorld, inverseInertiaTensor[0] ); deltaVelWorld = XMVector3Cross( deltaVelWorld, m_relativeContactPosition[0] ); float deltaVelocity = XMVectorGetX( XMVector3Dot( deltaVelWorld, m_contactNormal ) ); deltaVelocity += m_body[0]->GetInverseMass( ); if ( m_body[1] ) { deltaVelWorld = XMVector3Cross( m_relativeContactPosition[1], m_contactNormal ); deltaVelWorld = XMVector3TransformNormal( deltaVelWorld, inverseInertiaTensor[1] ); deltaVelWorld = XMVector3Cross( deltaVelWorld, m_relativeContactPosition[1] ); deltaVelocity += XMVectorGetX( XMVector3Dot( deltaVelWorld, m_contactNormal ) ); deltaVelocity += m_body[1]->GetInverseMass( ); } return CXMFLOAT3( m_desiredDeltaVelocity / deltaVelocity, 0.f, 0.f ); }
- 37. 2. ņČ®ļÅī Ēøä ĻĖ░ļīĆļÉśļŖö ņåŹļÅäņØś ļ│ĆĒÖöļ¤ēņØä Ļ│äņé░ ņŚ¼ĻĖ░ņä£ļŖö ļČäļ”¼ ņåŹļÅä(Separating Velocity)Ļ░Ć ļÅäņ×ģ ļČäļ”¼ ņåŹļÅäņØś ļ░śļīĆ ļ░®Ē¢źņØĖ ņĀæĻĘ╝ ņåŹļÅä(Closing Velocity)ļź╝ ļ©╝ņĀĆ ļ│┤ļ®┤ ņĀæĻĘ╝ ņåŹļÅäļŖö ļæÉļ¼╝ņ▓┤Ļ░Ć ņä£ļĪ£ ņøĆņ¦üņØ┤ļŖö ņåŹļÅäņØś ĒĢ®ņ£╝ļĪ£ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░ ņŚ¼ĻĖ░ņä£ ØæŻØæÉļŖö ņĀæĻĘ╝ ņåŹļÅä ØæØļŖö ļ¼╝ņ▓┤ņØś ņ£äņ╣ś ļ▓ĪĒä░ ŲĖØæØļŖö ļŗ©ņ£ä ļ▓ĪĒä░ļź╝ ņØśļ»Ė ņ£ä ņŗØņØä ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ░äļŗ©ĒĢśĻ▓ī ĒĢĀ ņłś ņ׳ņØī ØæŻØæÉ = ØæŻ ØæÄ ŌłÖ ÓʤØæØ ØæÅ ŌłÆ ØæØ ØæÄ + ØæŻ ØæÅ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ØæŻØæÉ = ŌłÆ(ØæŻ ØæÄ ŌłÆ ØæŻ ØæÅ) ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ
- 38. ņĀæĻĘ╝ ņåŹļÅäņØś ļ░®Ē¢źņØä ļ░śļīĆļĪ£ ĒĢśļ®┤ ļČäļ”¼ ņåŹļÅäņØĖļŹ░ ļČĆĒśĖļ¦ī ļ░öĻŠĖļ®┤ ļÉ© ļČäļ”¼ ņåŹļÅäļŖö ņČ®ļÅī ĒøäņŚÉ ļ░śļ░£ Ļ│äņłśņŚÉ ļ╣äļĪĆĒĢśņŚ¼ ļ│ĆĒĢśĻ▓ī ļÉśļŖöļŹ░ ņØ┤ļź╝ ĒåĄĒĢ┤ņä£ ņČ®ļÅī Ēøä ĻĖ░ļīĆļÉśļŖö ņåŹļÅäņØś ļ│ĆĒÖöļ¤ēņØä ņĢī ņłś ņ׳ņØī ØæŻØæĀ = (ØæŻ ØæÄ ŌłÆ ØæŻ ØæÅ) ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ØæŻØæĀ ŌĆ▓ = ŌłÆØæÉØæŻØæĀ ØæÉ = ØæŻ2 ŌĆ▓ ŌłÆ ØæŻ1 ŌĆ▓ ØæŻ1 ŌłÆ ØæŻ2 (0 Ōēż ØæÉ Ōēż 1) ╬öØæŻs = ØæŻØæĀ ŌĆ▓ ŌłÆ ØæŻØæĀ ╬öØæŻs = ŌłÆØæÉØæŻØæĀ ŌłÆ ØæŻØæĀ ╬öØæŻs = ŌłÆ 1 + ØæÉ ØæŻØæĀ
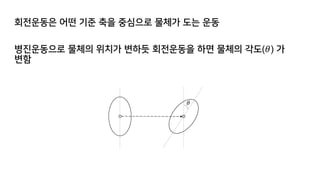
- 39. ļŗżņØī ņĮöļō£ļŖö ØæŻ ØæÄ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ņØä Ļ│äņé░ ØæŻ ØæÄ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ņŚÉņä£ ØæŻ ØæÅ ŌłÖ ÓʤØæØ ØæÄ ŌłÆ ØæØ ØæÅ ļź╝ ļ╣╝ļ®┤ ļČäļ”¼ ņåŹļÅä CXMFLOAT3 Contact::CalculateLocalVelocity( int bodyIndex, float duration ) { RigidBody* thisBody = m_body[bodyIndex]; CXMFLOAT3 velocity = XMVector3Cross( thisBody->GetRotation( ), m_relativeContactPosition[bodyIndex] ); velocity += thisBody->GetVelocity( ); CXMFLOAT3 contactVelocity = XMVector3TransformNormal( velocity, XMMatrixTranspose( m_contactToWorld ) ); CXMFLOAT3 accVelocity = thisBody->GetLastFrameAcceleration( ) * duration; accVelocity = XMVector3TransformNormal( accVelocity, XMMatrixTranspose( m_contactToWorld ) ); accVelocity.x = 0; contactVelocity += accVelocity; return contactVelocity; } m_contactVelocity = CalculateLocalVelocity( 0, duration ); if ( m_body[1] ) { m_contactVelocity -= CalculateLocalVelocity( 1, duration ); } ĒÜīņĀä ņ£ĀļÅä ņåŹļÅä
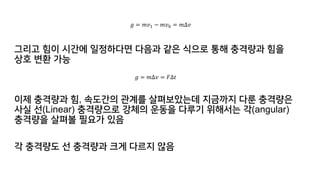
- 40. ļČäļ”¼ ņåŹļÅäļź╝ Ļ│äņé░ĒĢśļ®┤ ╬öØæŻs = ŌłÆ 1 + ØæÉ ØæŻØæĀļź╝ ĒåĄĒĢ┤ ņČ®ļÅī Ēøä ĻĖ░ļīĆļÉśļŖö ņåŹļÅäņØś ļ│ĆĒÖöļ¤ēņØä Ļ│äņé░ĒĢĀ ņłś ņ׳ņØī void Contact::CalculateDesiredDeltaVelocity( float duration ) { constexpr float velocityLimit = 0.25f; float velocityFromAcc = 0; if ( m_body[0]->IsAwake( ) ) { velocityFromAcc += XMVectorGetX( XMVector3Dot( m_body[0]->GetLastFrameAcceleration( ) * duration, m_contactNormal ) ); } if ( m_body[1] && m_body[1]->IsAwake( ) ) { velocityFromAcc -= XMVectorGetX( XMVector3Dot( m_body[1]->GetLastFrameAcceleration( ) * duration, m_contactNormal ) ); } float thisRestitution = m_restitution; if ( fabsf( m_contactVelocity.x ) < velocityLimit ) { thisRestitution = 0.f; } m_desiredDeltaVelocity = -m_contactVelocity.x - thisRestitution * ( m_contactVelocity.x - velocityFromAcc ); }
- 41. 3. ņÜöĻĄ¼ļÉśļŖö ņåŹļÅä ļ│ĆĒÖöļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ļ░£ņāØĒĢ┤ņĢ╝ ĒĢśļŖö ņČ®Ļ▓®ļ¤ēņØä Ļ│äņé░ ļ░£ņāØĒĢ┤ņĢ╝ ĒĢśļŖö ņČ®Ļ▓®ļ¤ēņØĆ ļ¦żņÜ░ Ļ░äļŗ©ĒĢśĻ▓ī Ļ│äņé░ĒĢĀ ņłś ņ׳ņØī ņČ®ļÅī Ēøä ĻĖ░ļīĆļÉśļŖö ņåŹļÅäņØś ļ│ĆĒÖö ØæŻņÖĆ ļŗ©ņ£ä ņČ®Ļ▓®ļ¤ēņŚÉ ļö░ļźĖ ņåŹļÅä ļ│ĆĒÖö Øææļź╝ ņĢīĻĖ░ ļĢīļ¼ĖņŚÉ ņČ®Ļ▓®ļ¤ēņØĆ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░ Øæö = ØæŻ Øææ return CXMFLOAT3( m_desiredDeltaVelocity / deltaVelocity, 0.f, 0.f );
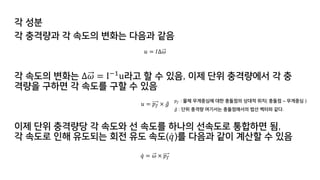
- 42. 4. ņČ®Ļ▓®ļ¤ēņØä ĻĖ░ļ░śņ£╝ļĪ£ ņäĀ ņä▒ļČäĻ│╝ Ļ░ü ņä▒ļČäņØä ļČäļ”¼ĒĢśĻ│Ā ņØ┤ļź╝ Ļ░üĻ░üņØś ļ¼╝ņ▓┤ņŚÉ ļ░śņśü ņĢ×ņŚÉņä£ ļŗżļżśļŹś Ļ│ĄņŗØņØä ļ¢Āņś¼ļ”¼ļ®░ ņĮöļō£ļź╝ ļ│┤ļ®┤ŌĆ” CXMFLOAT3 impulsiveTorque = XMVector3Cross( m_relativeContactPosition[0], impulse ); rotationChange[0] = XMVector3TransformCoord( impulsiveTorque, inverseInertiaTensor[0] ); velocityChange[0] = impulse * m_body[0]->GetInverseMass( ); m_body[0]->AddVelocity( velocityChange[0] ); m_body[0]->AddRotation( rotationChange[0] ); if ( m_body[1] ) { impulsiveTorque = XMVector3Cross( impulse, m_relativeContactPosition[1] ); rotationChange[1] = XMVector3TransformCoord( impulsiveTorque, inverseInertiaTensor[1] ); velocityChange[1] = impulse * -m_body[1]->GetInverseMass( ); m_body[1]->AddVelocity( velocityChange[1] ); m_body[1]->AddRotation( rotationChange[1] ); } ŌłåØæŻ = Øæö ØæÜ ŌłåØ£ö = (IŌłÆ1(ØæØ Øæō ├Ś ÓĘ£Øæö)) ņ×æņÜ® ļ░śņ×æņÜ®ņØś ļ▓Ģņ╣ÖņŚÉ ļö░ļØ╝ ļ░®Ē¢źļ¦ī ļ░śļīĆļĪ£ ļ░öĻ┐öņä£ ņĀüņÜ®ĒĢ£ļŗż.
- 43. Ļ░Ģņ▓┤ ņ×Éņ▓┤ņØś ņÜ┤ļÅÖĻ│╝ ņČ®ļÅī ĒøäņØś ņÜ┤ļÅÖņØä ņŗ£ļ«¼ļĀłņØ┤ņģśĒĢśļŖö Ļ▓āņØ┤ ņŚ¼ĻĖ░ņä£ ļŗżļŻ©ļŖö ļ¼╝ļ”¼ ņŚöņ¦äņØś ĻĖ░ļ│ĖņĀüņØĖ ļČĆļČäņØ┤ļØ╝Ļ│Ā ĒĢĀ ņłś ņ׳ņØī ļ¼╝ļ”¼ ņŚöņ¦äņØś ņĀäņ▓┤ņĀüņØĖ ļÅÖņ×æ Ļ│╝ņĀĢņØä ĻĘĖļ”╝ņ£╝ļĪ£ Ļ░äļץĒĢśĻ▓ī Ēæ£ĒśäĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░ÖņØĆļŹ░ ņØ┤ pptļŖö ļČēņØĆ ļ░ĢņŖż ļČĆļČäļ¦ī ļŗżļŻ©ņŚłņØī (ņäĖļČĆ ļé┤ņÜ®ņŚÉ Ļ┤Ćņŗ¼ņ׳ņ£╝ņŗ£ļ®┤ ņ▒ģņØä ņ░ĖĻ│Ā) Ļ░Ģņ▓┤ ļŹ░ņØ┤Ēä░ Ēל ĒåĀĒü¼ ļ░£ņāØĻĖ░ Ļ░Ģņ▓┤ ņŚģļŹ░ņØ┤ĒŖĖ (Ļ░Ģņ▓┤ ņ×Éņ▓┤ņØś ņÜ┤ļÅÖ ņŗ£ļ«¼ļĀłņØ┤ņģś) ņČ®ļÅī ļ░£ņāØĻĖ░ ņČ®ļÅī ļŹ░ņØ┤Ēä░ ņČ®ļÅī Ēøä ņÜ┤ļÅÖņØä ņŗ£ļ«¼ļĀłņØ┤ņģś ĒלĻ│╝ ĒåĀĒü¼ļź╝ ņĀüņÜ® ņ£äņ╣ś, ņåŹļÅä ļō▒ņØä Ļ│äņé░ ņČ®ļÅī ļ░£ņāØ ņåŹļÅä ļ│ĆĒÖöļź╝ ņĀüņÜ®
- 44. ĻĄ¼ĒśäĒĢśļ®┤ņä£ Ļ▓¬ņØĆ ņŗ£Ē¢ēņ░®ņśż ĻĄ¼ĒśäĒĢ┤ļ│╝ ļ¦łņØīņØ┤ ņŚåņ£╝ņŗĀ ļČäņØĆ Ēī©ņŖż
- 45. ņāśĒöī ņĮöļō£ņØś BVH ĻĄ¼Ēśä ņżæ ņל ļÅÖņ×æĒĢśņ¦Ć ņĢŖņĢśļŹś ļČĆļČä ņČ®ļÅī ļ░£ņāØĻĖ░ņØś ņČ®ļÅī Ļ░ĆņåŹņØä ņ£äĒĢ┤ņä£ BVH(Bounding Volume Hierarchy) ļź╝ ņé¼ņÜ® ņ▒ģņŚÉ ņŗżļ”░ ņĮöļō£Ļ░Ć ņśłņĀ£ ĒöäļĪ£ĻĘĖļשņŚÉņä£ļŖö ņŗżņĀ£ļĪ£ ņé¼ņÜ®ļÉśņ¦Ć ņĢŖĻ│Ā ņ׳ņØī for (Box *box = boxData; box < boxData+boxes; box++) { if (!cData.hasMoreContacts()) return; cyclone::CollisionDetector::boxAndHalfSpace(*box, plane, &cData); // Check for collisions with each shot for (AmmoRound *shot = ammo; shot < ammo+ammoRounds; shot++) { if (shot->type != UNUSED) { if (!cData.hasMoreContacts()) return; // When we get a collision, remove the shot if (cyclone::CollisionDetector::boxAndSphere(*box, *shot, &cData)) { shot->type = UNUSED; } } } } ņØ┤ļĀćĻ▓ī ņØ╝ņØ╝ņØ┤ Ļ▓Ćņé¼ŌĆ”
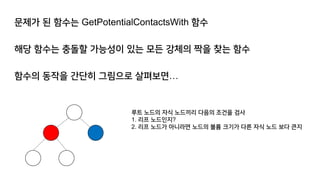
- 46. ļ¼ĖņĀ£Ļ░Ć ļÉ£ ĒĢ©ņłśļŖö GetPotentialContactsWith ĒĢ©ņłś ĒĢ┤ļŗ╣ ĒĢ©ņłśļŖö ņČ®ļÅīĒĢĀ Ļ░ĆļŖźņä▒ņØ┤ ņ׳ļŖö ļ¬©ļōĀ Ļ░Ģņ▓┤ņØś ņ¦ØņØä ņ░ŠļŖö ĒĢ©ņłś ĒĢ©ņłśņØś ļÅÖņ×æņØä Ļ░äļŗ©Ē׳ ĻĘĖļ”╝ņ£╝ļĪ£ ņé┤ĒÄ┤ļ│┤ļ®┤ŌĆ” ļŻ©ĒŖĖ ļģĖļō£ņØś ņ×ÉņŗØ ļģĖļō£ļü╝ļ”¼ ļŗżņØīņØś ņĪ░Ļ▒┤ņØä Ļ▓Ćņé¼ 1. ļ”¼Ēöä ļģĖļō£ņØĖņ¦Ć? 2. ļ”¼Ēöä ļģĖļō£Ļ░Ć ņĢäļŗłļØ╝ļ®┤ ļģĖļō£ņØś ļ│╝ļź© Ēü¼ĻĖ░Ļ░Ć ļŗżļźĖ ņ×ÉņŗØ ļģĖļō£ ļ│┤ļŗż Ēü░ņ¦Ć
- 47. ļ”¼Ēöä ļģĖļō£ņØ┤ļ®┤ ņČ®ļÅīĒĢĀ Ļ░ĆļŖźņä▒ņØ┤ ņ׳ļŖöņ¦Ć ņ▓┤Ēü¼ĒĢĀ ļīĆņāüņ£╝ļĪ£ ņäĀņĀĢ ļ”¼Ēöä ļģĖļō£Ļ░Ć ņĢäļŗłĻ▒░ļéś ļģĖļō£ņØś ļ│╝ļź© Ēü¼ĻĖ░Ļ░Ć ļŗżļźĖ ļģĖļō£ ļ│┤ļŗż Ēü¼ļŗżļ®┤ ņ×ÉņŗØ ļģĖļō£ļĪ£ ņ¦äĒ¢ē ņ×ÉņŗØ ļģĖļō£Ļ░Ć ļ”¼Ēöä ļģĖļō£ļØ╝ļ®┤ ņČ®ļÅīĒĢĀ Ļ░ĆļŖźņä▒ņØ┤ ņ׳ļŖöņ¦Ć Ļ▓Ćņé¼ ņÖ╝ņ¬Į ĻĘĖļ”╝ņØś ĒÖöņé┤Ēæ£ļĪ£ ļ¼ČņØĖ ņīŹņØä Ļ▓Ćņé¼ĒĢśĻ▓ī ļÉ© ņØ┤ļź╝ ņ×¼ĻĘĆņĀüņ£╝ļĪ£ ļ░śļ│Ą ļ”¼Ēöä ļģĖļō£ ļ”¼Ēöä ļģĖļō£Ļ░Ć ņĢäļŗś ņ×ÉņŗØ ļģĖļō£ļĪ£ ņØ┤ļÅÖ
- 48. ļ¼ĖņĀ£ļŖö ņ×ÉņŗØ ļģĖļō£ļü╝ļ”¼ļŖö ņČ®ļÅī Ļ░ĆļŖźņä▒ņØ┤ ņ׳ļŗżĻ│Ā ĒīÉļŗ©ļÉśņ¦Ć ņĢŖņØä ņłś ņ׳ņØī ņØ┤ņĀä ĻĘĖļ”╝ņŚÉņä£ ņØ┤ ļæÉ ļģĖļō£ļü╝ļ”¼ļŖö ņČ®ļÅī Ļ░ĆļŖźņä▒ Ļ▓Ćņé¼Ļ░Ć ņØ┤ļżäņ¦Ćņ¦Ć ņĢŖņØī ĻĘĖļלņä£ ņČ®ļÅī Ļ▓Ćņé¼Ļ░Ć ņĀ£ļīĆļĪ£ ņØ┤ļżäņ¦Ćņ¦Ć ņĢŖņĢä ļ¼╝ņ▓┤Ļ░Ć ĒåĄĻ│╝ĒĢśļŖö ĒśäņāüņØ┤ ļ░£ņāØ
- 49. ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ņ×ÉņŗØ ļģĖļō£Ļ░ä ņČ®ļÅī Ļ░ĆļŖźņä▒ņØä Ļ▓Ćņé¼ĒĢśļÅäļĪØ ņłśņĀĢ. template <typename BoundingVolumeClass, typename RigidBody> unsigned int BVHNode<BoundingVolumeClass, RigidBody>::GetPotentialContactsWith( const BVHNode<BoundingVolumeClass, RigidBody>* other, PotentialContact<RigidBody>* contacts, unsigned int limit ) const { if ( Overlaps( other ) == false || limit == 0 ) { return 0; } if ( IsLeaf( ) && other->IsLeaf( ) ) { contacts->m_body[0] = m_body; contacts->m_body[1] = other->m_body; return 1; } if ( other->IsLeaf( ) || ( ( IsLeaf( ) == false ) && m_volume.GetSize( ) >= other->m_volume.GetSize( ) ) ) { unsigned int count = m_children[0]->GetPotentialContactsWith( m_children[1], contacts, limit ); if ( limit > count ) { count += m_children[0]->GetPotentialContactsWith( other, contacts + count, limit - count ); } if ( limit > count ) { count += m_children[1]->GetPotentialContactsWith( other, contacts + count, limit - count ); } return count; } // ņāØļץŌĆ” }
- 50. Reference Ļ▓īņ×ä ļ¼╝ļ”¼ ņŚöņ¦ä Ļ░£ļ░£ https://ko.wikipedia.org/wiki/Ļ│ĀņĀäļ¼╝ļ”¼ĒĢÖ https://ko.wikipedia.org/wiki/ļē┤Ēä┤_ņÜ┤ļÅÖ_ļ▓Ģņ╣Ö https://ko.wikipedia.org/wiki/ņÜ┤ļÅÖļ¤ē https://ko.wikipedia.org/wiki/Ļ░üĻ░ĆņåŹļÅä https://ko.wikipedia.org/wiki/Ļ░üņåŹļÅä