Geometric Configurations for Robots.pptx
•Download as PPTX, PDF•
0 likes•67 views

This document discusses geometric configurations for robots. It defines key robotics terms like degrees of freedom, manipulator, workspace, and links and joints. It explains that robots come in many forms like arms and vehicles, but can be understood through their combinations of mechanical elements like links and joints used to meet required functions. The document focuses on manipulation robots and distinguishes between robot arms and vehicles based on whether the link connecting an object to the ground is fixed or allows self-propelled motion.











Geometric Configurations for Robots.pptx
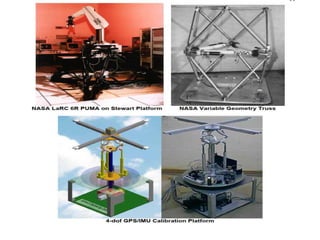
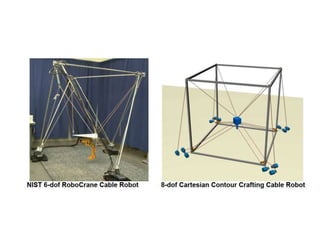
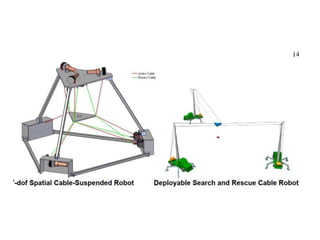
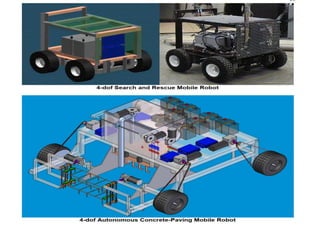
- 1. Geometric Configurations for Robots • Robots take a bewildering variety of forms: • arms of all shapes, • vehicles with all possible arrangements of wheels or legs, • devices which although clearly robotic are neither vehicles nor arms
- 2. • This Topic makes sense of this variety by explaining how the functions required of a robot can be met by combinations of mechanical elements such as links and joints. • It concentrates on manipulation robots.
- 14. Definitions • Robot: An electromechanical device with multiple degrees-of-freedom (dof) that is programmable to accomplish a variety of tasks. • Robotics: The science of robots. Humans working in this area are called roboticists. • Degrees-of-freedom (dof ): the number of independent motions a device can make. Also called mobility.
- 15. • How many dove does the human arm have? The human leg? • The human hand has 27 degrees of freedom: 4 in each finger, 3 for extension and flexion and one for abduction and adduction; the thumb is more complicated and has 5 DOF, leaving 6 DOF for the rotation and translation of the wrist 1.
- 16. • From the perspective of biomechanics, human leg has 30 DOF. • Manipulator: Electromechanical device capable of interacting with its environment. • Anthropomorphic: Designed or appearing like human beings. • end-effector: The tool, gripper, or other device mounted at the end of a manipulator, for accomplishing useful tasks.
- 17. • Workspace : The volume in space that a robot’s end-effector can reach, both in position and orientation. • Position: The translational (straight-line) location of an object. • Orientation: The rotational (angular) location of an object. An airplane’s orientation is measured by roll, pitch, and yaw angles. •
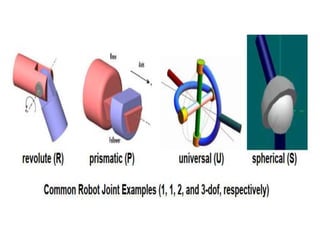
- 18. • Pose: position and orientation taken together. • Link: A rigid piece of material connecting joints in a robot. • Joint: The device which allows relative motion between two links in a robot. • Kinematics: The study of motion without regard to forces/torques. • Dynamics: The study of motion with regard to forces/torques.
- 19. • Actuator: Provides force/torque for robot motion. • Sensor: Reads actual variables in robot motion for use in control. • Haptics: From the Greek, meaning to touch. Haptic interfaces give human operators the sense of touch and forces from the computer, either in virtual or real, remote environments. Also called force reflection in telerobotics.
- 21. The distinction between arms and vehicles • If we wish to move an object about in space, relative to something fixed such as the ground, • How many dimensions are needed? 6(six) six dimensions are needed to specify situation: • Three for its position 3 • Three for its orientation or attitude 3
- 22. • These must be controlled in some way, by connecting the object to the ground with a link allowing the transmission of the forces and torques needed to support and move the object. • If the link is continuous and fixed to the ground we have a manipulator; if it is made by a self-contained device which propels itself about on a surface or through a medium we have a vehicle.