






Governor Characteristics and Regulation of alternators.pptx
- 1. Prime-Mover Governor Characteristics (Synchronous Generator) Dr. P.V.V. Rama Rao Professor in EEED Maturi Venkata Subba Rao (MVSR) Engineering College (A) Nadergul, Hyderabad ŌĆō 501510 (Accredited by NAAC and UG Programs in CE, EEE, ECE, CSE, IT & ME by NBA) www.mvsrec.edu.in
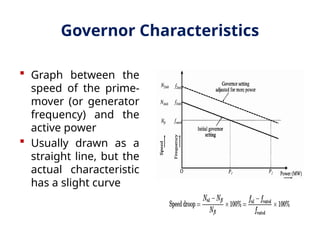
- 2. Governor Characteristics ’é¦ Graph between the speed of the prime- mover (or generator frequency) and the active power ’é¦ Usually drawn as a straight line, but the actual characteristic has a slight curve
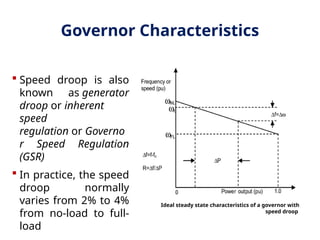
- 3. Governor Characteristics Ideal steady state characteristics of a governor with speed droop ’é¦ Speed droop is also known as generator droop or inherent speed regulation or Governo r Speed Regulation (GSR) ’é¦ In practice, the speed droop normally varies from 2% to 4% from no-load to full- load
- 4. Governor Characteristics ’é¦ For the successful parallel operation of the alternators, the load-speed characteristics of the prime movers should be drooping ’é¦ Speed of the prime mover should decrease slightly with increasing loads ’é¦ Drooping characteristic provides inherent stability of the operation of an alternator when paralleled with the other alternators ’é¦ Alternators with zero droop are known as isochronous alternators and are inherently unstable when operated in parallel
- 5. ’é¦ These alternators are subjected to unexpected load swings, unless controlled by the solid- state regulators. ’é¦ The amount of power generated by an alternator is determined by its prime mover. ’é¦ The speed of the prime mover is fixed while its torque can be varied. ’é¦ This is done by adjusting the tension of the spring of the speed governor mechanism. ’é¦ Load-speed characteristic is shifted to a new position parallel to the initial position. Governor Characteristics
- 6. Regulation of two generators ’é¦ When two alternators are operating in parallel, then, ’é¦ Case 1 ŌĆō An increase in governor set points on one of them, Increases the system frequency, and Increases the power delivered by that alternator and decreases the power delivered by the other alternator. ’é¦ Case 2 ŌĆō The field current of the second alternator is increased, Increases the terminal voltage of the system, and Increases the reactive power (Q) delivered by that alternator, while reduces the reactive power delivered by the other alternator.
- 7. ’é¦ Two different controls are carried out on the governor characteristics. ’é¦ The parameter R (╬öf/╬öP) is adjusted during off-line condition of the unit to ensure its proper coordination with the other units, the second control shifts the straight line characteristic parallel to itself to change the load distribution among the generators connected in parallel as well as to maintain the system frequency. ’é¦ The second control known as supplementary control. Regulation of two generators
- 8. Regulation of two generators ’é¦ In Fig., the governor characteristics of two generating units are shown. ’é¦ Supposing if two generator units sharing the total load P i.e. P =P1+P2 and at constant frequency f0. ’é¦ Now if the total load increases by PŌĆÖ , the frequency reduces to fŌĆÖ 0 then the two generator units increases their output by supplying kinetic energy which in turn reduction in speed.
- 9. ’é¦ In order to maintain the system frequency, one of the generators or both the generator increase their output which is shown in dotted lines of the figure. ’é¦ Now the total load PŌĆÖ is hared by both the generators with increased output i.e. PŌĆÖ = PŌĆÖ 1+PŌĆÖ 2 . ’é¦ It is to be noted that if the frequency of two areas are to be controlled, the static frequency drop is 50% of the isolated operation of two systems. ’é¦ Also, if there is change in load in any area, half Regulation of two generators
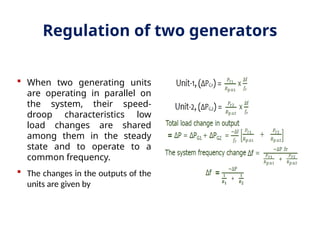
- 10. Regulation of two generators ’é¦ When two generating units are operating in parallel on the system, their speed- droop characteristics low load changes are shared among them in the steady state and to operate to a common frequency. ’é¦ The changes in the outputs of the units are given by
- 11. Thank You!