Human computer interaction

The document describes an intuitive interaction system using speech recognition for fire safety. The system is part of a Cooperative Fire Security System (CFS2H) that uses robots, sensors, and a human interface to detect and respond to fires in high-rise buildings. The interaction system allows human operators to communicate with robots, sensors, and other systems using natural language to perform tasks like surveillance, remote control of rescue robots, and survivor detection. It utilizes speech recognition and face detection modules along with a messaging system called HARMS to facilitate communication between all components of the CFS2H system. The overall goal is to provide an effective way for human operators to coordinate the response to fires in high-rise buildings through an intuitive speech-


Human computer interaction
- 1. Topic An Intuitive Interaction System for Fire Safety Using A Speech Recognition Technology In context of Cooperative Fire Security System using HARMS (CFS2H) HCI
- 2. Presented by: âĒ Amna Iqbal âĒ Asma Iqbal âĒ Faiza Zahid âĒ Shabana Kausar âĒ Tahseen Fatima
- 3. Introduction âĒ An intuitive interaction system ïPart of âCooperative Fire Security System using HARMSâ (CFS2H) ïReadily deal with fire in a high-rise building. ïThe interaction system is a bridge connecting human, as an operator, to the whole system. ïUtilizing a natural language processing (NLP) technology using Microsoft kinect makes the interaction ïHuman-agent-robot-machine-sensor (HARMS) provides a distributed network so that the systems are able to communicate with a high level communication protocol.
- 4. Why Need For Human robot interaction? âĒ Fire in a high-rise building is challenging for firefighters to handle because many factors e.g. Transporting firefighting equipment to the fire spot located at a high floor, seeking the fire floor, evacuation of people, etc. Are against firefighters. âĒ Firefighter ladders cannot reach high enough to fight fires at the top of the building. Going into the building itself, in order to extinguish the blazing fire, is typically too dangerous and puts firefighters at risk. âĒ The challenges faced by firefighters in a high-rise building may result in a late reaction and possible failure in the initial stages of fire suppression.
- 5. HRI For Fire Safety âĒ HRI (human robot interaction) system involve âĒ Various types of robots âĒ Agents âĒ Humans âĒ HRI operation âĒ Fire detection âĒ Situation report to the operator âĒ Rescuing survivors guided by the operator
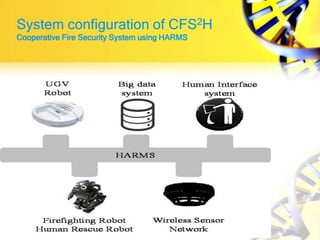
- 6. System configuration of CFS2H Cooperative Fire Security System using HARMS
- 7. System Configuration of CFS2H âĒ UGV robot Search the area for the exact fire location and report to interaction system, transmit fire location to firefighter robot and human rescue robot. âĒ Big data Analyzes the sensor data to determine the optimal perception model to detect any potential fire. âĒ Human interface Kiosk-type computer system that utilizes a Microsoft kinect for speech recognition, a system to communicate with cooperative system by natural language.
- 8. System Configuration of CFS2H âĒ Wireless sensor network Wireless sensor network gathers condition information of certain place, also generate a fire alert âĒ Firefighting robot extinguishes fire using fire extinguisher âĒ Human rescue robot Rescue the survivor with the help of commands.
- 9. UGV RobotRescue robot Kiosk-type system Firefighter robot
- 10. Objectives of the Interaction System In CFS2H âĒ A computer system acts as a bridge to connect the operator with the whole system (CFS2H). âĒ The user uses human voice to communicate with the interaction system. âĒ Three main objectives are defined in order to achieve the goal of the interaction system. âĒ Surveillance for fire safety âĒ Remote control of human rescue robot âĒ Survivor detection
- 11. Communication using HARMS âĒ HARMS is a communication provider that allows systems to communicate with each other with a high-level message protocol. âĒ HARMS supports multicast of a message to enable 1:n communication, where n is the number of agents/systems in a system. âĒ All the systems are connected through TCP/IP protocol using either Ethernet or Wi-Fi. âĒ All the systems of the whole system are fully connected âĒ The interaction system communicates with some of the systems; ï wireless sensor network ï Big data system ï Human rescue robot for rescuing survivor(s) ï UGV robot
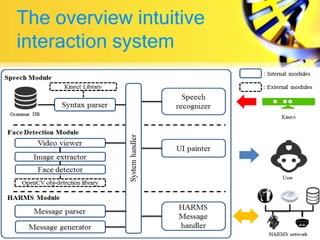
- 12. System design and implementation âĒ The intuitive interaction system that is proposed comprised of: ïSpeech Module, ïFace Detection Module, ïHARMS Handler, ïSystem Handler, including GUI
- 13. ContâĶ. âĒ Speech Module âĒ Converts operatorâs speech into a command âĒ Utilize a speech device called Microsoft kinect to be able to recognize human speech. âĒ The speech recognizer uses a confidence value to estimate individual words from speech ï Setting proper threshold for the confidence value is important to accurately extract any words from human voice ï Use threshold (0.2) that is achieved by trial and error approach, a well-known method to find a solution by reducing a previous trial error.
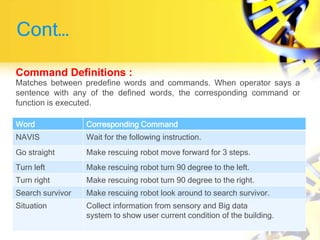
- 14. ContâĶ Word Corresponding Command NAVIS Wait for the following instruction. Go straight Make rescuing robot move forward for 3 steps. Turn left Make rescuing robot turn 90 degree to the left. Turn right Make rescuing robot turn 90 degree to the right. Search survivor Make rescuing robot look around to search survivor. Situation Collect information from sensory and Big data system to show user current condition of the building. Command Definitions : Matches between predefine words and commands. When operator says a sentence with any of the defined words, the corresponding command or function is executed.
- 15. ContâĶ âĒ Face detection module: âĒ Uses a face detection technique, based on object-detection libraries provided by openCV . âĒ A series of frames transmitted from the human rescue robot, is used to detect any human faces. âĒ While the interaction system is looking for any survivors, the operator transmits control commands to the human rescue robot directing it to move in order to search the surrounding area in which some people might be waiting to be rescued. âĒ Once any survivor is detected by the face detection module, the interaction system immediately sends a notification message to let the human rescue robot know that a survivor is now in front of the robot.
- 16. ContâĶ âĒ HARMS Module : âĒ All the communications or interactions between the interaction system and other systems are performed through HARMS Module. It generates a message according to HARMS messaging protocol.
- 17. Cont.. HARMS module provides 3ways to send message: âĒ Unicast âĒ Multicast âĒ Broadcast. The three message types distinguish ways of how to react to a message.
- 18. The overview intuitive interaction system
Editor's Notes
- #16: human rescue robot:which roams over near the fire location
- #18: For instance, if a system receives a query message from other system, the system is forced to send a notification message as a response of the query message. In other words, when the interaction system sends a query message to Big data system, Big data system should provide certain data to the interaction system as a response