This document outlines the development of a helicopter flight simulator in Matlab/Simulink. It discusses (1) the equations of motion for modeling a rotorcraft's attitude and position using Newton's laws of motion and forces/moments. (2) Stability and control theory using a states vector to model aerodynamic forces from changes in states using stability derivatives for forces, moments, speeds and angular speeds. (3) The simulation model using a controls/states vector and linear differential equations. It then details the (4) Simulink schematic, (5) 6 degree of freedom Simulink model, and (6) including cockpit instruments and controls to evaluate (7) helicopter performance.
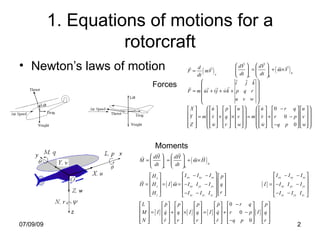
2. 1. Equations of motions for a rotorcraft NewtonˇŻs laws of motion 07/09/09 Forces Moments
3. 1.Equations of motions for a rotorcraft (continued) The attitude and the position of the helicopter 07/09/09
4. 2. Stability and control theory 07/09/09 States vector Aerodynamic force given by changes in states Stability derivatives Forces, moments, speeds, angular speeds A1 =lateral cyclic pitch, B1 =longitudinal cyclic pitch, ¦Čc =collective pitch ¦ČT =tail rotor collective. Control vector Change in aerodynamic force given by changes in control Control derivatives Linear differential system
5. 3. Simulation model 07/09/09 Controls vector or States vector States and controls vector Classic linear system Improved linear system for MMLE method