Hp embedd system and basic obotics
ŌĆóDownload as PPTX, PDFŌĆó
2 likesŌĆó278 views

It consists of very basics command Embedded System and Robotics which in helpful understanding the functionality and implementation






![LCD interfacing
We need to interface LCD to our
microcontroller so that we can display
output on it.
’ü▒ Types:
ŌĆó Text display
ŌĆó Graphics display
’ü▒ Lcd functions:
ŌĆó Lcd_clear()
ŌĆó Lcd_gotoxy(x,y)
ŌĆó Lcd_putchar(char c)
ŌĆó Lcd_putsf(constant string)
ŌĆó Lcd_puts(char arr)
ŌĆó Iota(into Val, char arr[])
ŌĆó Foa(float armchair decimal, char arr[])](https://image.slidesharecdn.com/hpembeddandrobotics-161202080750/85/Hp-embedd-system-and-basic-obotics-8-320.jpg)












Hp embedd system and basic obotics
- 1. B.Tech Industrial Training Presentation on EMBEDDED SYSTEM AND ROBOTICS Presented PALLAVI BHARTI 20130549 E&C Engg. Dept., SMIT Under the Supervision of MR.ROHAN SINGH TRAINING HEAD
- 2. Contents ŌĆó Introduction to Embedded Systems ŌĆó Types & Applications ŌĆó Microcontroller ŌĆó IDE & Programmer ŌĆó I/O function registers ŌĆó LCD interfacing ŌĆó ADC ŌĆó Communication ŌĆó Introduction to Robotics ŌĆó History and Laws of Robotics ŌĆó How robot moves? ŌĆó Sensors ŌĆó Conclusion
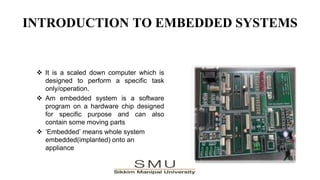
- 3. INTRODUCTION TO EMBEDDED SYSTEMS ’üČ It is a scaled down computer which is designed to perform a specific task only/operation. ’üČ Am embedded system is a software program on a hardware chip designed for specific purpose and can also contain some moving parts ’üČ ŌĆśEmbeddedŌĆÖ means whole system embedded(implanted) onto an appliance
- 4. Types & Applications Embedded systems ’āśNon-real time embedded system: no deadline ŌĆó Security systems ŌĆó Mobile phones ŌĆó Alarm system ŌĆó Digital camera ’āśReal time embedded system: deadline to be met ’é¦ Sensor system in nuclear plants ’é¦ Missile defense system ’é¦ Flight control system PROPERTIES OF EMBEDDED SYSTEMS ’é¦ Small in size ’é¦ Low cost ’é¦ High accuracy ’é¦ Easy to design ’é¦ Low power required ’é¦ Portable ’é¦ Efficient APPLICATIONS OF EMBEDDED SYSTEMS Security system, Cell phone, Automobile system, Memory storage device, Calculators , Printer , Mouse , Alarm system
- 5. MICROCONTROLLER ŌĆó Programmable digital processor with necessary peripherals. ŌĆó It is complex sequential digital circuit meant to carry out the job according to the program. Classification ŌĆó Embedded (self-contained) 8-bit microcontroller ŌĆó 16 to 32 bit microcontroller ŌĆó Digital signal processor Features: ŌĆó Built in monitor program ŌĆó Built in program memory ŌĆó Facility to interface external memory ŌĆó Interrupts ŌĆó Analog I/O ŌĆó Serial I/O ŌĆó Timers
- 6. IDE AND PROGRAMMER Some compilers are: ŌĆó WINAVR ŌĆó Code vision AVR ŌĆó AVR studio ŌĆó Parts of programmer: ’āś Software(to open .hex file on the computer) ŌĆó Avr dude ŌĆó Avr studio ŌĆó Atprog ’āś Hardware ŌĆó Usb-asp(sub)
- 7. I/O PORTS ŌĆó DDRX(data direction register) ŌĆó PORT X ŌĆó PINX
- 8. LCD interfacing We need to interface LCD to our microcontroller so that we can display output on it. ’ü▒ Types: ŌĆó Text display ŌĆó Graphics display ’ü▒ Lcd functions: ŌĆó Lcd_clear() ŌĆó Lcd_gotoxy(x,y) ŌĆó Lcd_putchar(char c) ŌĆó Lcd_putsf(constant string) ŌĆó Lcd_puts(char arr) ŌĆó Iota(into Val, char arr[]) ŌĆó Foa(float armchair decimal, char arr[])
- 9. ADC ŌĆó Analog to digital converter ŌĆó It is used to convert physical quantity like temperature, pressure, etc. into electrical domain i.e. voltage ŌĆó functions for adc ŌĆó Read_adc()
- 10. Timers It is a register which is used to measure time interval ’āś Timers in Atmega 16: ŌĆó Timer 0(8 bit) ŌĆó Timer 1(16 bit) ŌĆó Timer (8 bit) ’āś Timer modes: ŌĆó Normal ŌĆó PWM(pulse width modulation) ŌĆó CTC(clear timer on compare)
- 11. Communication Communications Techniques: ŌĆó Simplex ŌĆó Half duplex ŌĆó Full duplex ’ü▒ Modes of data transfer: ’é¦ Synchronous ’é¦ Asynchronous ’é¦ Parallel ’é¦ Serial ’ü▒ Serial peripheral interface(SPI) ’ü▒ Universal Synchronous Asynchronous Transmitter Receiver(USART)
- 12. Interrupt It is a signal that stops the current program and forces the execution of another program ŌĆó Types: ’ü▒Mask able ’ü▒Non mask able ’ü▒Hardware ’ü▒Overflow ’ü▒Compare match 3 external Interrupts in Atmega16: ŌĆó INT0: PD2, Pin 16 ŌĆó INT1: PD3, Pin 17 ŌĆó INT2: PB2, Pin 3
- 13. Introduction to Robotics ŌĆó Robotics is the science of designing and building Robots Robot ŌĆó Re-programmable multi- functional manipulator designed to move materials, parts, tools or specialized devices to programmed motions ŌĆó Name ROBOT derived from Czechoslovakian word Robota meaning ŌĆścompulsory labourŌĆÖ ŌĆó ŌĆśUnimationŌĆÖ ŌĆōJoe Engleberger-Father of Robotics Essential characteristics: ŌĆó Mobility ŌĆó Flexibility ŌĆó Programmability ŌĆó Mechanical capability ŌĆó Sensors
- 14. Laws of Robotics Isaac AsimovŌĆÖs, 1940 ŌĆśroboticsŌĆÖ 1. A robot must not injure human being, or, through inaction, allow a human being to come to harm. 2. A robot must obey the orders given it by human being, except where such orders would not conflict with the first law. 3. A robot must protect its own existence as long as it doesnŌĆÖt conflict with law 1st and 2nd. Basic elements for building autonomous robot. ŌĆó Robot chassis and actuators: body and wheels arrangement. ŌĆó Electronics: includes Sensors, motion control circuits, power management system etc. ŌĆó Power Source :Usually batteries or direct supply through wire. ŌĆó Intelligence: is achieved by using Microcontroller.
- 15. How a Robot moves? ŌĆó Controlling rpm and direction of wheels, controls speed ŌĆó3 motors for 4 wheels ŌĆó 2 motors for 2 wheels and 1 ball bearing caster
- 16. Motor and Motor Drives ŌĆó Convert electrical energy into mechanical energy Motors used in Embedded System & Robotics: ŌĆó Servo, Stepper, Geared DC. H-bridge: ŌĆó Electronic circuit enables a voltage to be applied across load in either direction ŌĆó Allows microcontroller logic chip or remote control can electronically command the motor to go forward reverse brake and coast.
- 17. Sensors ŌĆó Sensors are like ŌĆ£feelŌĆØ for robot. ŌĆó Device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. Some sensors are: ’āś Temperature sensor ŌĆó like DS1621,thermistor. LM35 measures from 0 to 100 degrees ’āś Light Dependent Resistor (LDR) ŌĆó a resistor whose resistance varies with intensity of light. ŌĆó IR sensor: (IR led + photodiode + LM358) ŌĆó Infra red emitting diode as transmitter and photo diode as receiver ŌĆó 0V<=Output<=5V ŌĆó Output can be taken to a microcontroller by ADC ŌĆó From any ŌĆ£non black bodyŌĆØ i.e. obstacle, IR reflects and falls on photo diode. ŌĆó Hence Photo diode become forward bias, and it turn on the IC LM358 that gives the output.
- 18. Conclusion ŌĆó electronics + mechanics + software = ROBOT ŌĆó Efficient ŌĆó Reliable ŌĆó Interaction with environment ŌĆó Multi Tasking ŌĆó Favor for Mankind, if Used wisely
- 19. ReferencesŌĆó www.google.com ŌĆó www.wikipedia.com Google images ŌĆó http://www.embeddedsystem.com/ ŌĆó http://robotics.nasa.gov/ ŌĆó www.cmosexod.com ŌĆó www.best-microcontrollerprojects.com ŌĆó Handouts given by the organization
- 20. Thank You