



Humanoid-Robotics-An-Introduction (1).pptx
- 1. Error uploading image. Humanoid Robotics: An Introduction Humanoid robots are a fascinating field at the intersection of engineering, computer science, and human biology. These advanced machines are designed to mimic the appearance and capabilities of the human body, enabling them to interact with the world in intuitive and natural ways. by Acetians Technologies
- 2. What are Humanoid Robots? Assist Humans Humanoid robots can be used to assist and collaborate with humans in a variety of tasks, from household chores to complex industrial work. Enhance Research Studying humanoid robots can provide valuable insights into human anatomy, movement, and cognition, advancing fields like neuroscience and biomechanics. Explore Artificial Intelligence Developing humanoid robots requires advancements in areas like computer vision, natural language processing, and machine learning, pushing the boundaries of AI technology. The Future of Humanoid Robotics As humanoid robots continue to evolve, they have the potential to revolutionize industries, transform human-robot interaction, and expand our understanding of ourselves and the world around us.
- 3. Early Pioneers The concept of humanoid robots dates back to the 18th century, with pioneers like Jacques de Vaucanson and Leonardo da Vinci exploring mechanical humanoid designs. Mid-20th Century Advancements In the 1950s-1960s, researchers made significant progress, developing some of the first humanoid robot prototypes like WABOT-1 and HONDA's P2. Modern Humanoid Robots Recent decades have seen an explosion of humanoid robot development, with advanced models like ASIMO, Atlas, and Pepper becoming increasingly sophisticated and capable. Improved Mobility Humanoid robots are becoming more agile, with enhanced balance, dexterity, and the ability to navigate complex environments. Advancing AI and Cognition Breakthroughs in artificial intelligence, machine learning, and natural language processing are enabling humanoid robots to perceive, reason, and interact more intelligently. Human-Robot Interaction Humanoid robots are being designed to work seamlessly alongside humans, with improved social awareness and the ability to communicate more naturally. The Future of Humanoid Robotics As these technologies continue to evolve, humanoid robots have the potential to transform industries, enhance human capabilities, and push the boundaries of what is possible in robotics and artificial intelligence.
- 4. Programming Paradigms for Humanoid Robots Control Algorithms Sophisticated control algorithms are essential for coordinating the precise movements and actions of humanoid robots. These algorithms process sensor data and generate the appropriate control signals for the robot's motors and actuators. Artificial Intelligence Integrating AI capabilities, such as machine learning and natural language processing, allows humanoid robots to perceive their environment, interpret information, and make autonomous decisions. Model Training Extensive training of machine learning models, often using large datasets, enables humanoid robots to learn and adapt their behaviors, improving their performance and versatility over time. By leveraging these programming paradigms, developers can create humanoid robots that can navigate complex environments, interact with humans, and perform a wide range of tasks, paving the way for their integration into various industries and applications.
- 5. Mechanical Foundations in Humanoid Robotics Error uploading image. Robot Design Designing the structure and frame is crucial for enabling functionality and movement in humanoid robots. Mechanical Components Selecting the right mechanical components, such as motors and actuators, is essential for humanoid robot mobility. Movement and Mobility Achieving fluid and natural movement is a key challenge in humanoid robotics, requiring advanced mechanical engineering.
- 6. Electrical Systems in Humanoid Robotics Sensors Humanoid robots utilize a variety of sensors such as cameras, microphones, touch sensors, and force/torque sensors to gather information about their surroundings and internal state. Controllers Sophisticated microprocessors and control algorithms are needed to process sensor data and coordinate the complex movements of humanoid robots. Power Systems Reliable power sources, such as batteries or tethered power supplies, provide the necessary energy to operate the robot's motors, electronics, and computing systems.
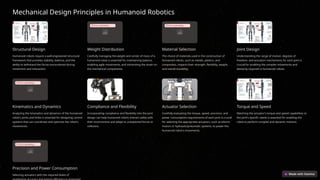
- 7. Mechanical Design Principles in Humanoid Robotics Structural Design Humanoid robots require a well-engineered structural framework that provides stability, balance, and the ability to withstand the forces encountered during movement and interaction. Error uploading image. Weight Distribution Carefully managing the weight and center of mass of a humanoid robot is essential for maintaining balance, enabling agile movements, and minimizing the strain on the mechanical components. Error uploading image. Material Selection The choice of materials used in the construction of humanoid robots, such as metals, plastics, and composites, impacts their strength, flexibility, weight, and overall durability. Joint Design Understanding the range of motion, degrees of freedom, and actuation mechanisms for each joint is crucial for enabling the complex movements and dexterity required in humanoid robots. Error uploading image. Kinematics and Dynamics Analyzing the kinematics and dynamics of the humanoid robot's joints and limbs is essential for designing control systems that can coordinate and optimize the robot's movements. Compliance and Flexibility Incorporating compliance and flexibility into the joint design can help humanoid robots interact safely with their environment and adapt to unexpected forces or collisions. Actuator Selection Carefully evaluating the torque, speed, precision, and power consumption requirements of each joint is crucial for selecting the appropriate actuators, such as electric motors or hydraulic/pneumatic systems, to power the humanoid robot's movements. Torque and Speed Matching the actuator's torque and speed capabilities to the joint's specific needs is essential for enabling the robot to perform complex and dynamic motions. Error uploading image. Precision and Power Consumption Selecting actuators with the required levels of
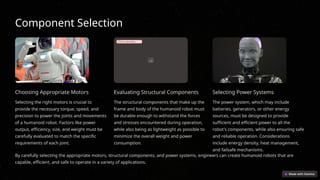
- 8. Component Selection Choosing Appropriate Motors Selecting the right motors is crucial to provide the necessary torque, speed, and precision to power the joints and movements of a humanoid robot. Factors like power output, efficiency, size, and weight must be carefully evaluated to match the specific requirements of each joint. Error uploading image. Evaluating Structural Components The structural components that make up the frame and body of the humanoid robot must be durable enough to withstand the forces and stresses encountered during operation, while also being as lightweight as possible to minimize the overall weight and power consumption. Selecting Power Systems The power system, which may include batteries, generators, or other energy sources, must be designed to provide sufficient and efficient power to all the robot's components, while also ensuring safe and reliable operation. Considerations include energy density, heat management, and failsafe mechanisms. By carefully selecting the appropriate motors, structural components, and power systems, engineers can create humanoid robots that are capable, efficient, and safe to operate in a variety of applications.
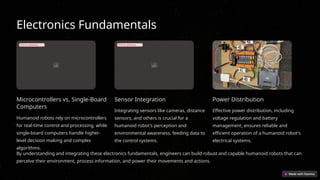
- 9. Electronics Fundamentals Error uploading image. Microcontrollers vs. Single-Board Computers Humanoid robots rely on microcontrollers for real-time control and processing, while single-board computers handle higher- level decision making and complex algorithms. Error uploading image. Sensor Integration Integrating sensors like cameras, distance sensors, and others is crucial for a humanoid robot's perception and environmental awareness, feeding data to the control systems. Power Distribution Effective power distribution, including voltage regulation and battery management, ensures reliable and efficient operation of a humanoid robot's electrical systems. By understanding and integrating these electronics fundamentals, engineers can build robust and capable humanoid robots that can perceive their environment, process information, and power their movements and actions.
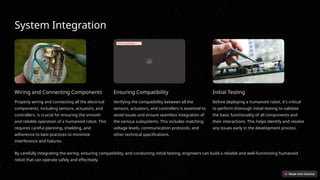
- 10. System Integration Wiring and Connecting Components Properly wiring and connecting all the electrical components, including sensors, actuators, and controllers, is crucial for ensuring the smooth and reliable operation of a humanoid robot. This requires careful planning, shielding, and adherence to best practices to minimize interference and failures. Error uploading image. Ensuring Compatibility Verifying the compatibility between all the sensors, actuators, and controllers is essential to avoid issues and ensure seamless integration of the various subsystems. This includes matching voltage levels, communication protocols, and other technical specifications. Initial Testing Before deploying a humanoid robot, it's critical to perform thorough initial testing to validate the basic functionality of all components and their interactions. This helps identify and resolve any issues early in the development process. By carefully integrating the wiring, ensuring compatibility, and conducting initial testing, engineers can build a reliable and well-functioning humanoid robot that can operate safely and effectively.
- 11. Programming Basics Programming Fundamentals Understanding core programming concepts such as variables, data types, control structures, and algorithms is essential for developing software to control humanoid robots. These foundational skills enable engineers to write efficient and reliable code. Error uploading image. Robot Operating System (ROS) ROS is a popular open-source framework widely used in robotics, including humanoid robots. It provides a modular and distributed architecture for building robot applications, simplifying the integration of sensors, actuators, and control systems. Motion Planning and Control Implementing advanced motion planning algorithms and control systems is crucial for enabling humanoid robots to perform complex movements and navigate their environments. This includes techniques like inverse kinematics, trajectory optimization, and feedback control. By mastering programming fundamentals, leveraging tools like ROS, and developing sophisticated motion planning and control systems, engineers can create highly capable and responsive humanoid robots.
- 12. Control Systems Feedback Control Principles Humanoid robots rely on advanced feedback control systems to maintain balance, coordinate movements, and respond to their environment. Key concepts include sensors, actuators, error detection, and closed-loop control. Motion Control Algorithms Implementing effective motion control algorithms is critical for enabling humanoid robots to perform complex, dynamic movements. This includes techniques like PID control, impedance control, and model-predictive control. Testing and Debugging Thoroughly testing and debugging control algorithms is essential to ensure the safe and reliable operation of humanoid robots. This involves simulation, hardware-in-the-loop testing, and iterative refinement of the control systems.
- 13. Error uploading image. Voice Recognition and Synthesis Voice Command Integration Integrating voice commands with control systems enables seamless human-robot interaction. Thorough Testing Rigorous testing ensures reliable and accurate voice interaction for humanoid robots. Voice Synthesis Implementing voice synthesis capabilities allows humanoid robots to communicate verbally.
- 14. Computer Vision in Humanoid Robotics Vision Processing Algorithms Enhance the capabilities of humanoid robots by configuring advanced vision processing algorithms. Facial Recognition Explore the implementation of facial recognition technology to enable seamless human-robot interaction. Sensor Integration Learn how to seamlessly integrate vision data into the control system for enhanced functionality.
- 15. Advanced Programming Techniques for Humanoid Robotics Sophisticated Control Algorithms Enhance the capabilities of humanoid robots by implementing advanced control techniques, including AI- powered decision-making and behavior adaptation. Integrated AI Services Leverage cloud-based AI services to unlock new levels of functionality and intelligence in your humanoid robots. Advanced Development Tools Utilize the latest programming tools and frameworks to build sophisticated, responsive humanoid robot applications.
- 16. Machine Learning Integration in Humanoid Robotics Enhanced Capabilities Train models for specific tasks and behaviors to enhance robot capabilities. Autonomous Improvements Implement reinforcement learning for continuous, autonomous improvements. Performance Optimization Evaluate model performance and accuracy to optimize robotic functionalities.
- 17. Comprehensive Testing for Humanoid Robots Validate Functionalities Conduct thorough tests to validate all functionalities and interactions of humanoid robots. Identify and Resolve Issues Identify and resolve any issues in the hardware and software components. Optimize Performance Fine-tune parameters to ensure optimal performance and reliability.
- 18. Designing the User Interface Define User Requirements Identify the target users and their specific needs to ensure effective interaction between the user and the humanoid robot. Identify Target Users and Needs Determine the critical functionalities required for the user to interact with the humanoid robot seamlessly. Determine Critical Functionalities Define the key capabilities and features that will enable the user to effectively control and utilize the humanoid robot.
- 19. Selecting Development Tools Error uploading image. Choose UI Development Frameworks Select the right frameworks and tools to build an intuitive and responsive user interface for your humanoid robot. Ensure OS and Hardware Compatibility Ensure your chosen development tools and frameworks are compatible with the robot's operating system and hardware to enable seamless integration.
- 20. Intuitive Design Arrange UI components logically to minimize user effort and enhance efficiency. Focused Arrangement Sketch the layout of the UI panel, focusing on ease of use and streamlined interaction. Enhance User Experience Design the UI with the user's needs in mind, creating an intuitive and effortless experience.