











Introduction to Mechanical Vibration Introduction to Mechanical Vibration lec4
- 1. FUNDAMENTAL OF VIBRATIONS VIBRATION ANALYSIS PROCEDURE DR ANIL KUMAR DEPARTMENT OF MECHANICAL AND INDUSTRIAL ENGINEERING 1
- 2. CONTENTS ŌĆó VIBRATION ANALYSIS OF A PHYSICAL SYSTEM ŌĆó STEPS OF VIBRATION ANALYSIS ŌĆó ENERGY STORING (SPRING OR STIFFNESS) ELEMENT ŌĆó ENERGY DISSIPATING (DAMPING) ELEMENT ŌĆó INERTIA (MASS) ELEMENT 2
- 3. VIBRATION ANALYSIS OF A PHYSICAL SYSTEM ŌĆó A vibratory system is a dynamic one as the variables such as the excitations (inputs) and responses (outputs) are time dependent ŌĆó To understand the behaviour of a physical system we model it mathematically ŌĆó Usually, we make a discrete model representing it in terms of its basic elements ŌĆó Mass, Stiffness and Damping 3
- 4. STEPS OF VIBRATION ANALYSIS 1. Mathematical modelling 2. Derivation of the governing equations 3. Solution of the equations 4. Interpretation of the results 4
- 5. 1. MATHEMATICAL MODELLING ŌĆó Represent all the important features of the system ŌĆó Include enough details to allow describing the system in terms of equations ŌĆó The mathematical model may be linear or nonlinear, depending on the behavior of the systemŌĆÖs components ŌĆó Linear models permit quick solutions and are simple to handle ŌĆó However, nonlinear models sometimes reveal certain characteristics of the system that cannot be predicted using linear models ŌĆó Sometimes the mathematical model is gradually improved to obtain more accurate results 5
- 6. MATHEMATICAL MODELLING ŌĆó In this approach, first a very crude or elementary model is used to get a quick insight into the overall behavior of the system. Subsequently, the model is refined by including more components and/or details so that the behavior of the system can be observed more closely. 6 Modelling of a forging hammer
- 7. 2. DERIVATION OF GOVERNING EQUATIONS ŌĆó Use the principles of dynamics and derive the equations that describe the vibration of the system ŌĆó Draw the free-body diagrams of all the masses involved ŌĆó The free-body diagram of a mass can be obtained by isolating the mass and indicating all externally applied forces, the reactive forces, and the inertia forces ŌĆó The equations of motion of a vibrating system are usually in the form of a set of ordinary differential equations for a discrete system and partial differential equations for a continuous system. ŌĆó NewtonŌĆÖs second law of motion, DŌĆÖAlembert s principle, and the principle of conservation of energy 7
- 8. 3. SOLUTION OF THE GOVERNING EQUATIONS ŌĆó Solve the equations to find the response of the vibrating system ŌĆó standard methods of solving differential equations, Laplace transform methods, matrix methods, and numerical methods ŌĆó Numerical methods involving computers can be used to solve the equations 8
- 9. 4. INTERPRETATION OF THE RESULTS ŌĆó The solution of the governing equations gives the displacements, velocities, and accelerations of the various masses of the vibrating system ŌĆó These results must be interpreted with a clear view of the purpose of the analysis and the possible design implications of the results 9
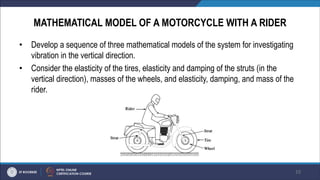
- 10. MATHEMATICAL MODEL OF A MOTORCYCLE WITH A RIDER ŌĆó Develop a sequence of three mathematical models of the system for investigating vibration in the vertical direction. ŌĆó Consider the elasticity of the tires, elasticity and damping of the struts (in the vertical direction), masses of the wheels, and elasticity, damping, and mass of the rider. 10
- 11. 11 keq: Stiffness of tire, strut and rider ceq: Damping of struts and rider meq: mass of wheels, vehicle body and rider
- 12. ENERGY STORING (SPRING OR STIFFNESS) ELEMENT ŌĆó A spring is a type of mechanical link, which in most applications is assumed to have negligible mass and damping ŌĆó In fact, any elastic or deformable body or member, such as a cable, bar, beam, shaft or plate, can be considered as a spring ŌĆó A spring is said to be linear if the elongation or reduction in length x is related to the applied force F as, F=kx ŌĆó k : spring constant or spring stiffness or spring rate ŌĆó The spring constant k is always positive and denotes the force (positive or negative) required to cause a unit deflection (elongation or reduction in length) in the spring 12
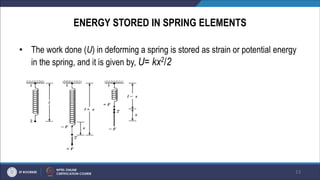
- 13. ENERGY STORED IN SPRING ELEMENTS ŌĆó The work done (U) in deforming a spring is stored as strain or potential energy in the spring, and it is given by, U= kx2/2 13
- 14. EXAMPLES ŌĆó Stiffness of a rod ŌĆó Stiffness of a cantilever beam 14
- 15. SPRING COMBINATIONS ŌĆó Case 1: Springs in series ŌĆó Case 2: Springs in parallel 15 ØæśØæÆØæ× = Øæś1 + Øæś2 1 ØæśØæÆØæ× = 1 Øæś1 + 1 Øæś2
- 16. ENERGY DISSIPATING (DAMPING) ELEMENT ŌĆó In many practical systems, the vibrational energy is gradually converted to heat or sound. ŌĆó Due to the reduction in the energy, the response, such as the displacement of the system, gradually decreases. ŌĆó The mechanism by which the vibrational energy is gradually converted into heat or sound is known as damping. ŌĆó A damper is assumed to have neither mass nor elasticity, and damping force exists only if there is relative velocity between the two ends of the damper. 16
- 17. VISCOUS DAMPING ŌĆó Viscous damping is caused by such energy losses as occur in liquid lubrication between moving parts or in a fluid forced through a small opening by a piston, as in automobile shock absorbers. The viscous-damping force is directly proportional to the relative velocity between the two ends of the damping device. 17 F = C v F= damping force C= damping constant v= relative velocity
- 18. COMBINATION OF DAMPERS ŌĆó Case 1: Dampers in parallel ŌĆó Case 2: Dampers in series 18 ØæÉØæÆØæ× = ØæÉ1 + ØæÉ2 1 ØæÉØæÆØæ× = 1 ØæÉ1 + 1 ØæÉ2
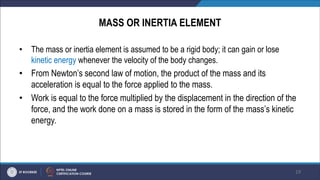
- 19. MASS OR INERTIA ELEMENT ŌĆó The mass or inertia element is assumed to be a rigid body; it can gain or lose kinetic energy whenever the velocity of the body changes. ŌĆó From NewtonŌĆÖs second law of motion, the product of the mass and its acceleration is equal to the force applied to the mass. ŌĆó Work is equal to the force multiplied by the displacement in the direction of the force, and the work done on a mass is stored in the form of the massŌĆÖs kinetic energy. 19