inverse z transform
ŌĆóDownload as PPTX, PDFŌĆó
15 likesŌĆó26,429 views

The document discusses various methods for finding the inverse z-transform, including inspection of z-transform pairs, partial fraction expansion, and power series expansion. It provides examples of using each method to find the inverse z-transform of given z-functions. It also discusses properties of the z-transform, such as time shifting and convolution, that can help in solving inverse problems. Sample problems demonstrate applying the techniques to compute inverse z-transforms and use properties to solve for sequences.
![Inverse z- transform example 1
Consider a sequence Øæź[Øæø] with z transform
of Øæŗ Øæ¦ =
1
1ŌłÆ
1
4
Øæ¦ŌłÆ1 1ŌłÆ
1
2
Øæ¦ŌłÆ1
Øæ¦ >
1
2
Where the ROC is as shown
4](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-4-320.jpg)

![Inverse z- transform example 1
Note that Øæŗ(Øæ¦) Now can be rewritten as
X Øæ¦ =
ŌłÆ1
1ŌłÆ
1
4
Øæ¦ŌłÆ1
+
2
1ŌłÆ
1
2
Øæ¦ŌłÆ1
The inverse z transform results in the Øæź[Øæø]
shown below Øæź Øæø = ŌłÆ 1
4
Øæø
Øæó Øæø + 2 1
2
Øæø
Øæó Øæø
6](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-6-320.jpg)





![Partial fraction example 2
Recall that from the z-transform pairs table
we have
Therefore Øæź[Øæø] is given by
13](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-13-320.jpg)

![Inverse z transform by using
power series expansion
From the definition of the z-transform we
can write the z-transform as
Øæŗ Øæ¦ =
Øæø=ŌłÆŌł×
Ōł×
Øæź[Øæø]Øæ¦ŌłÆØæø
= Ōŗ» + Øæź ŌłÆ2 Øæ¦2 + Øæź ŌłÆ1 Øæ¦1 + Øæź 0 + Øæź 2 Øæ¦ŌłÆ1 + Øæź 2 Øæ¦ŌłÆ2 + Ōŗ»
This is known as Laurent series
From this series we can find the sequence
Øæź[Øæø] as illustrated by the next example
15](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-15-320.jpg)
![Inverse z transform by using power
series example 3
Find the inverse z-transform for the
sequence defined by
Øæŗ Øæ¦ = Øæ¦2
1 ŌłÆ 1
2
Øæ¦ŌłÆ1
1 + Øæ¦ŌłÆ1
1 ŌłÆ Øæ¦ŌłÆ1
Solution
Note the sequence Øæŗ[Øæ¦] can be expanded
as Øæŗ Øæ¦ = Øæ¦2
ŌłÆ 1
2
Øæ¦ ŌłÆ 1 + 1
2
Øæ¦ŌłÆ1
If we compare Øæŗ Øæ¦ with the Laurent series
we can extract Øæź[Øæø] as follows
16](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-16-320.jpg)

![Inverse z transform by using
power series example 4
Consider the z transform defined by
Øæŗ Øæ¦ =
1
1ŌłÆØæÄØæ¦ŌłÆ1 ØæōØæ£Øæ¤ Øæ¦ > ØæÄ
Find Øæź[Øæø] by using long division
18](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-18-320.jpg)
![Inverse z transform by using
power series example 4
Solution
This series reduces to Øæź Øæø = ØæÄ Øæø
Øæó[Øæø]
19](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-19-320.jpg)




![Example 6
Determine the z-transform and the ROC for
the sequence Øæź Øæø = 3(2) Øæø
Øæó Øæø ŌłÆ 4(3) Øæø
Øæó Øæø
Solution
We can divide Øæź[Øæø] into two different
functions Øæź1 Øæø = (2) Øæø
Øæó Øæø ØæÄØæøØææ Øæź2 Øæø =
(3) Øæø
Øæó Øæø
Now Øæź[Øæø] can be rewritten as Øæź Øæø = 3Øæź1 Øæø ŌłÆ
4Øæź2 Øæø
26](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-26-320.jpg)
![Example 7
Determine the z-transform of Øæź[Øæø] = Øæó[ŌłÆØæø]
Solution
By using the time reversal property we
have
28](https://image.slidesharecdn.com/643inversez-transform-150402121248-conversion-gate01/85/inverse-z-transform-28-320.jpg)




inverse z transform
- 1. The inverse z transform The inverse z-transform can be found by one of the following ways ’ü« Inspection method ’ü« Partial fraction expansion ’ü« Power series expansion Each will be explained briefly next 1
- 2. Inverse z transform by inspection method The inspection method is based on the z transform pair table. In order to find the inverse z transform we compare Øæŗ(Øæ¦) to one of the standard transform pairs listed in the z transform pairs table 2
- 3. Inverse z transform by partial fraction If Øæŗ(Øæ¦) is not in a form listed in the table of z transform pairs we can use the partial fraction method to simplify the function into one of the standard forms listed in the z transform pair table 3
- 4. Inverse z- transform example 1 Consider a sequence Øæź[Øæø] with z transform of Øæŗ Øæ¦ = 1 1ŌłÆ 1 4 Øæ¦ŌłÆ1 1ŌłÆ 1 2 Øæ¦ŌłÆ1 Øæ¦ > 1 2 Where the ROC is as shown 4
- 5. Inverse z- transform example 1 SØæ£ØæóØæÖØæĪØæ¢Øæ£Øæø Note that Øæŗ(Øæ¦) can be rewritten as X Øæ¦ = 1 1ŌłÆ 1 4 Øæ¦ŌłÆ1 1ŌłÆ 1 2 Øæ¦ŌłÆ1 = ØÉ┤1 1ŌłÆ 1 4 Øæ¦ŌłÆ1 + ØÉ┤2 1ŌłÆ 1 2 Øæ¦ŌłÆ1 To find the constants ØÉ┤1 and ØÉ┤2 we use the following ØÉ┤1 = 1 ŌłÆ 1 4 Øæ¦ŌłÆ1 Øæŗ Øæ¦ | Øæ¦ŌłÆ1=4 = ŌłÆ 1 Similarly ØÉ┤2 = 1 ŌłÆ 1 2 Øæ¦ŌłÆ1 Øæŗ Øæ¦ | Øæ¦ŌłÆ1=2 = 2 5
- 6. Inverse z- transform example 1 Note that Øæŗ(Øæ¦) Now can be rewritten as X Øæ¦ = ŌłÆ1 1ŌłÆ 1 4 Øæ¦ŌłÆ1 + 2 1ŌłÆ 1 2 Øæ¦ŌłÆ1 The inverse z transform results in the Øæź[Øæø] shown below Øæź Øæø = ŌłÆ 1 4 Øæø Øæó Øæø + 2 1 2 Øæø Øæó Øæø 6
- 7. Inverse z transform by the partial fraction with - ØæĆ Ōēź Øæü The partial fraction method can be used to find the inverse z-transform for rational functions with numerator of order ØæĆ and denominator of order Øæü The partial fraction can be used only if the numerator order ØæĆ is less than denominator order Øæü If the numerator order is greater than or equal the denominator order then we use long division to make the denominator order Øæü greater than the numerator order ØæĆ before we can use the partial fraction method 7
- 8. Partial fraction with - ØæĆ Ōēź Øæü The long division converts the Øæŗ(Øæ¦) function in the following form Øæŗ Øæ¦ = Øæ¤=0 ØæĆŌłÆØæü ØÉĄØæ¤ Øæ¦ŌłÆØæ¤ + Øæś=1 Øæü ØÉ┤ Øæś 1 ŌłÆ Øææ Øæś Øæ¦ŌłÆ1 Where ØæĆ is the numerator order, Øæü is the denominator order, ØÉ┤ Øæś are constants of the partial fraction and Øææ Øæś are the roots 8
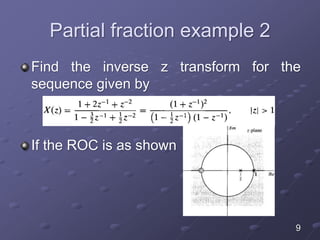
- 9. Partial fraction example 2 Find the inverse z transform for the sequence given by If the ROC is as shown 9
- 10. Partial fraction example 2 As it can be seen from Øæŗ(Øæ¦) the order of the numerator is equal to the order of the denominator Long division can be used to make the order of the numerator less than the order of the denominator as shown below 10
- 11. Partial fraction example 2 Now the function Øæŗ(Øæ¦) can be rewritten as shown below Or Where ØÉĄ0 = 2 11
- 12. Partial fraction example 2 The constants ØÉ┤1 and ØÉ┤2 can be found as follows Øæŗ(Øæ¦) can now be written as 12
- 13. Partial fraction example 2 Recall that from the z-transform pairs table we have Therefore Øæź[Øæø] is given by 13
- 14. Partial fraction with multiple poles and ØæĆ greater than Øæü If the Øæŗ(Øæ¦) function contains multiple poles and ØæĆ > Øæü as shown in this form The coefficients ØæÉ ØæÜ can be found by deriving Øæŗ(Øæ¦) ØæÜ number of times as shown 14
- 15. Inverse z transform by using power series expansion From the definition of the z-transform we can write the z-transform as Øæŗ Øæ¦ = Øæø=ŌłÆŌł× Ōł× Øæź[Øæø]Øæ¦ŌłÆØæø = Ōŗ» + Øæź ŌłÆ2 Øæ¦2 + Øæź ŌłÆ1 Øæ¦1 + Øæź 0 + Øæź 2 Øæ¦ŌłÆ1 + Øæź 2 Øæ¦ŌłÆ2 + Ōŗ» This is known as Laurent series From this series we can find the sequence Øæź[Øæø] as illustrated by the next example 15
- 16. Inverse z transform by using power series example 3 Find the inverse z-transform for the sequence defined by Øæŗ Øæ¦ = Øæ¦2 1 ŌłÆ 1 2 Øæ¦ŌłÆ1 1 + Øæ¦ŌłÆ1 1 ŌłÆ Øæ¦ŌłÆ1 Solution Note the sequence Øæŗ[Øæ¦] can be expanded as Øæŗ Øæ¦ = Øæ¦2 ŌłÆ 1 2 Øæ¦ ŌłÆ 1 + 1 2 Øæ¦ŌłÆ1 If we compare Øæŗ Øæ¦ with the Laurent series we can extract Øæź[Øæø] as follows 16
- 17. Inverse z transform by using power series example 3 17
- 18. Inverse z transform by using power series example 4 Consider the z transform defined by Øæŗ Øæ¦ = 1 1ŌłÆØæÄØæ¦ŌłÆ1 ØæōØæ£Øæ¤ Øæ¦ > ØæÄ Find Øæź[Øæø] by using long division 18
- 19. Inverse z transform by using power series example 4 Solution This series reduces to Øæź Øæø = ØæÄ Øæø Øæó[Øæø] 19
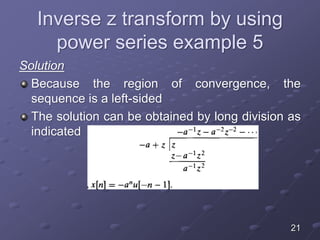
- 20. Inverse z transform by using power series example 5 Find the inverse z transform of the sequence defined by Øæŗ Øæ¦ = 1 1 ŌłÆ ØæÄØæ¦ŌłÆ1 ØæōØæ£Øæ¤ Øæ¦ < ØæÄ 20
- 21. Inverse z transform by using power series example 5 Solution Because the region of convergence, the sequence is a left-sided The solution can be obtained by long division as indicated 21
- 22. Z-transform properties The z-transform has many useful properties similar to Fourier transform properties These properties can be used to find the inverse z-transform for certain complex z functions as it will be demonstrated in the examples These properties are ’ü« Linearity 22
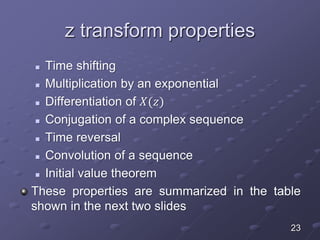
- 23. z transform properties ’ü« Time shifting ’ü« Multiplication by an exponential ’ü« Differentiation of Øæŗ(Øæ¦) ’ü« Conjugation of a complex sequence ’ü« Time reversal ’ü« Convolution of a sequence ’ü« Initial value theorem These properties are summarized in the table shown in the next two slides 23
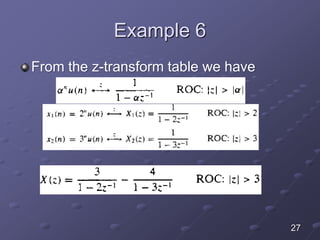
- 26. Example 6 Determine the z-transform and the ROC for the sequence Øæź Øæø = 3(2) Øæø Øæó Øæø ŌłÆ 4(3) Øæø Øæó Øæø Solution We can divide Øæź[Øæø] into two different functions Øæź1 Øæø = (2) Øæø Øæó Øæø ØæÄØæøØææ Øæź2 Øæø = (3) Øæø Øæó Øæø Now Øæź[Øæø] can be rewritten as Øæź Øæø = 3Øæź1 Øæø ŌłÆ 4Øæź2 Øæø 26
- 27. Example 6 From the z-transform table we have 27
- 28. Example 7 Determine the z-transform of Øæź[Øæø] = Øæó[ŌłÆØæø] Solution By using the time reversal property we have 28
- 29. Example 8 Compute the convolution of the following two sequences using the z transform Øæź1 Øæø = 1, ŌłÆ2, 1 Øæź2 Øæø = 1, 0 Ōēż Øæø Ōēż 5 0 ØæÆØæÖØæĀØæÆØæżŌäÄØæÆØæ¤ØæÆ Solution Note that the z transform of each of the previous sequences is given by Øæŗ1 Øæ¦ = 1 ŌłÆ 2Øæ¦ŌłÆ1 + Øæ¦ŌłÆ2 and Øæŗ2 Øæ¦ = 1 + Øæ¦ŌłÆ1 + Øæ¦ŌłÆ2 + Øæ¦ŌłÆ3 + Øæ¦ŌłÆ4 + Øæ¦ŌłÆ5 29
- 30. Example 8 If we multiply Øæŗ1(Øæ¦)Øæŗ2(Øæ¦) we get the following answer The inverse z-transform which is the convolution of Øæź Øæø = Øæź1 Øæø ŌłŚ Øæź2 Øæø is given by 30
- 31. Example 9 Find the inverse z transform for the function defined by Øæŗ Øæ¦ = log 1 + ØæÄØæ¦ŌłÆ1 Øæ¦ > ØæÄ solution 31
- 32. Example 9 32