
![Evaluating F(s)=L{f(t)}- Hard Way
remember ‚à´ ‚à´‚àí= vduuvudv
)tcos(v,dt)tsin(dv
dtsedu,eu stst
‚àí==
‚àí== ‚àí‚àí
‚à´
‚à´ ‚à´
‚àû
‚àí‚àí
‚àû ‚àû
‚àí‚àû‚àí‚àí
‚àí‚àí
=−−=∴
0
stst
0 0
st
0
stst
dt)tcos(es)1(e
dt)tcos(es)tcos(e[dt)tsin(e ]
)tsin(v,dt)tcos(dv
dtsedu,eu stst
==
‚àí== ‚àí‚àí
‚à´‚à´
‚à´
‚àû
‚àí‚àí
‚àû
‚àí‚àû‚àí
‚àû
‚àí
+‚àí=+‚àí
=∴
0
stst
0
st
0
st
0
st
dt)tsin(es)0(edt)tsin(es)tsin(e[
dt)tcos(e
]
2
0
st
0
st2
0 0
st2st
s1
1
dt)tsin(e
1dt)tsin(e)s1(
dt)tsin(es1dt)tsin(se
+
=
=+
=‚àí=
‚à´
‚à´
‚à´ ‚à´
‚àû
‚àí
‚àû
‚àí
‚àû ‚àû
‚àí‚àí
let
let
Substituting, we get:
It only gets worse…](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-6-320.jpg)

![Properties: Linearity
)s(Fc)s(Fc)}t(fc)t(fc{L 22112211 +=+
Example :
1s
1
)
1s
)1s()1s(
(
2
1
)
1s
1
1s
1
(
2
1
}e{L
2
1
}e{L
2
1
}e
2
1
e
2
1
{y
)}t{sinh(L
22
tt
tt
‚àí
=
‚àí
‚àí‚àí+
=
+
‚àí
‚àí
=‚àí
=‚àí
=
‚àí
‚àí
Proof :
)s(Fc)s(Fc
dte)t(fcdte)t(fc
dte)]t(fc)t(fc[
)}t(fc)t(fc{L
2211
0
st
22
0
st
11
st
22
0
11
2211
+
=+
=+
=+
‚à´‚à´
‚à´
‚àû
‚àí
‚àû
‚àí
‚àí
‚àû](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-12-320.jpg)
![Properties: Integrals
s
)s(F
)}t(fD{L 1
0 =‚àí
Example :
)}t{sin(L
1s
1
)
1s
s
)(
s
1
(
)}tcos(D{L
22
1
0
+
=
+
=‚àí
Proof :
let
stst
0
st
1
0
e
s
1
v,dtedv
dt)t(fdu),t(gu
dte)t(g)}t{sin(L
)t(fD)t(g
‚àí‚àí
‚àû
‚àí
‚àí
‚àí==
==
=
=
‚à´
‚à´
‚à´
=
=+‚àí= ‚àí‚àû‚àí
t
0
st
0
st
dt)t(f)t(g
s
)s(F
dte)t(f
s
1
]e)t(g
s
1
[
‚à´
‚àû
‚àí
‚àû<‚áí‚àû=
0
)()( dtetft st
If t=0, g(t)=0
for so
slower than‚à´
‚àû
‚àû‚Üí=
0
)()( tgdttf 0‚Üí‚àíst
e](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-18-320.jpg)
![Properties: Derivatives
(this is the big one)
)0(f)s(sF)}t(Df{L +
‚àí=
Example :
)}tsin({L
1s
1
1s
)1s(s
1
1s
s
)0(f
1s
s
)}tcos(D{L
2
2
22
2
2
2
2
‚àí=
+
‚àí
+
+‚àí
=‚àí
+
=‚àí
+
=
+
Proof :
)s(sF)0(f
dte)t(fs)]t(fe[
)t(fv,dt)t(f
dt
d
dv
sedu,eu
dte)t(f
dt
d
)}t(Df{L
0
st
0
st
stst
0
st
+‚àí
=+
==
‚àí==
=
+
‚àû
‚àí‚àû‚àí
‚àí‚àí
‚àû
‚àí
‚à´
‚à´
let](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-19-320.jpg)
![Properties: Nth order derivatives
)0(f)s(sF)}t(Df{L ‚àí=
)}t(fD{L 2
)0(f)s(sF)}t(Df{L)}t(g{L)s(G
)0('f)0(g
)t(Df)t(g
)0(g)s(sG)}t(Dg{L
)t(fD)t(Dgand)t(Df)t(g 2
‚àí===
=∴
=
‚àí=
==
)0('f)0(sf)s(Fs)0('f)]0(f)s(sF[s)0(g)s(sG)}t(Dg{L 2
−−=−−=−=∴
.etc),t(fD),t(fD 43
Start with
Now apply again
let
then
remember
Can repeat for
)0(f)0(sf)0('fs)0(fs)s(Fs)}t(fD{L )'1n()'2n()2n()1n(nn ‚àí‚àí‚àí‚àí
‚àí‚àí‚àí‚àí‚àí= ÔÅå](https://image.slidesharecdn.com/laplace-180514084528/85/Laplace-22-320.jpg)
Laplace
- 2. Why use Laplace Transforms? Find solution to differential equation using algebra Relationship to Fourier Transform allows easy way to characterize systems No need for convolution of input and differential equation solution Useful with multiple processes in system
- 3. How to use Laplace Find differential equations that describe system Obtain Laplace transform Perform algebra to solve for output or variable of interest Apply inverse transform to find solution
- 4. What are Laplace transforms? ∫ ∫ ∞+σ ∞−σ − ∞ − π == == j j st1 0 st dse)s(F j2 1 )}s(F{L)t(f dte)t(f)}t(f{L)s(F  t is real, s is complex!  Inverse requires complex analysis to solve  Note “transform”: f(t) → F(s), where t is integrated and s is variable  Conversely F(s) → f(t), t is variable and s is integrated  Assumes f(t) = 0 for all t < 0
- 5. Evaluating F(s) = L{f(t)} Hard Way – do the integral ∫ ∫ ∫ ∫ ∞ − ∞ ∞ +−−− − ∞ − = = + === = =−−== = 0 st 0 0 t)as(stat at 0 st dt)tsin(e)s(F tsin)t(f as 1 dtedtee)s(F e)t(f s 1 )10( s 1 dte)s(F 1)t(flet let let Integrate by parts
- 6. Evaluating F(s)=L{f(t)}- Hard Way remember ∫ ∫−= vduuvudv )tcos(v,dt)tsin(dv dtsedu,eu stst −== −== −− ∫ ∫ ∫ ∞ −− ∞ ∞ −∞−− −− =−−=∴ 0 stst 0 0 st 0 stst dt)tcos(es)1(e dt)tcos(es)tcos(e[dt)tsin(e ] )tsin(v,dt)tcos(dv dtsedu,eu stst == −== −− ∫∫ ∫ ∞ −− ∞ −∞− ∞ − +−=+− =∴ 0 stst 0 st 0 st 0 st dt)tsin(es)0(edt)tsin(es)tsin(e[ dt)tcos(e ] 2 0 st 0 st2 0 0 st2st s1 1 dt)tsin(e 1dt)tsin(e)s1( dt)tsin(es1dt)tsin(se + = =+ =−= ∫ ∫ ∫ ∫ ∞ − ∞ − ∞ ∞ −− let let Substituting, we get: It only gets worse…
- 7. Evaluating F(s) = L{f(t)} This is the easy way ... Recognize a few different transforms See table 2.3 on page 42 in textbook Or see handout .... Learn a few different properties Do a little math
- 8. Table of selected Laplace Transforms 1s 1 )s(F)t(u)tsin()t(f 1s s )s(F)t(u)tcos()t(f as 1 )s(F)t(ue)t(f s 1 )s(F)t(u)t(f 2 2 at + =‚áî= + =‚áî= + =‚áî= =‚áî= ‚àí
- 10. Note on step functions in Laplace ∫ ∞ − = 0 st dte)t(f)}t(f{L 0t,0)t(u 0t,1)t(u <= ≥= Unit step function definition: Used in conjunction with f(t) → f(t)u(t) because of Laplace integral limits:
- 11. Properties of Laplace Transforms Linearity Scaling in time Time shift “frequency” or s-plane shift Multiplication by tn Integration Differentiation
- 12. Properties: Linearity )s(Fc)s(Fc)}t(fc)t(fc{L 22112211 +=+ Example : 1s 1 ) 1s )1s()1s( ( 2 1 ) 1s 1 1s 1 ( 2 1 }e{L 2 1 }e{L 2 1 }e 2 1 e 2 1 {y )}t{sinh(L 22 tt tt ‚àí = ‚àí ‚àí‚àí+ = + ‚àí ‚àí =‚àí =‚àí = ‚àí ‚àí Proof : )s(Fc)s(Fc dte)t(fcdte)t(fc dte)]t(fc)t(fc[ )}t(fc)t(fc{L 2211 0 st 22 0 st 11 st 22 0 11 2211 + =+ =+ =+ ‚à´‚à´ ‚à´ ‚àû ‚àí ‚àû ‚àí ‚àí ‚àû
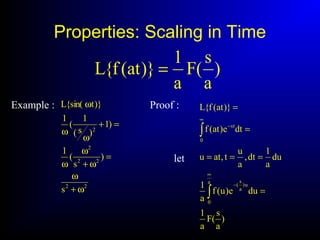
- 13. ) a s (F a 1 )}at(f{L = Example : 22 22 2 2 s ) s ( 1 )1 )s( 1 ( 1 )}t{sin(L ω+ ω = ω+ ω ω =+ ω ω ω Proof : ) a s (F a 1 due)u(f a 1 du a 1 dt, a u t,atu dte)at(f )}at(f{L a 0 u) a s ( 0 st ∫ ∫ ∞ − ∞ − = === = = let Properties: Scaling in Time
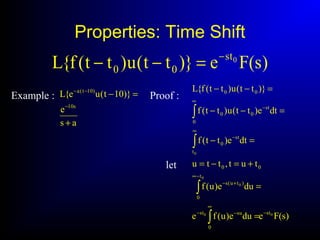
- 14. Properties: Time Shift )s(Fe)}tt(u)tt(f{L 0st 00 ‚àí =‚àí‚àí Example : as e )}10t(ue{L s10 )10t(a + =‚àí ‚àí ‚àí‚àí Proof : )s(Fedue)u(fe due)u(f tut,ttu dte)tt(f dte)tt(u)tt(f )}tt(u)tt(f{L 00 0 0 0 st 0 sust t 0 )tu(s 00 t st 0 0 st 00 00 ‚àí ‚àû ‚àí‚àí ‚àí‚àû +‚àí ‚àû ‚àí ‚àû ‚àí ‚à´ ‚à´ ‚à´ ‚à´ = = +=‚àí= =‚àí =‚àí‚àí =‚àí‚àí let
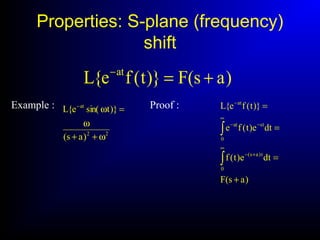
- 15. Properties: S-plane (frequency) shift )as(F)}t(fe{L at +=− Example : 22 at )as( )}tsin(e{L ω++ ω =ω− Proof : )as(F dte)t(f dte)t(fe )}t(fe{L 0 t)as( 0 stat at + = = = ∫ ∫ ∞ +− ∞ −− −
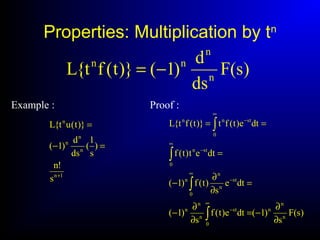
- 16. Properties: Multiplication by tn )s(F ds d )1()}t(ft{L n n nn −= Example : 1n n n n n s !n ) s 1 ( ds d )1( )}t(ut{L + =− = Proof : )s(F s )1(dte)t(f s )1( dte s )t(f)1( dtet)t(f dte)t(ft)}t(ft{L n n n 0 st n n n 0 st n n n 0 stn 0 stnn ∂ ∂ −= ∂ ∂ − = ∂ ∂ − = == ∫ ∫ ∫ ∫ ∞ − ∞ − ∞ − ∞ −
- 17. The “D” Operator 1. Differentiation shorthand 2. Integration shorthand )t(f dt d )t(fD dt )t(df )t(Df 2 2 2 = = )t(f)t(Dg dt)t(f)t(g t = = ∫∞− )t(fD)t(g dt)t(f)t(g 1 a t a − = = ∫if then then if
- 18. Properties: Integrals s )s(F )}t(fD{L 1 0 =‚àí Example : )}t{sin(L 1s 1 ) 1s s )( s 1 ( )}tcos(D{L 22 1 0 + = + =‚àí Proof : let stst 0 st 1 0 e s 1 v,dtedv dt)t(fdu),t(gu dte)t(g)}t{sin(L )t(fD)t(g ‚àí‚àí ‚àû ‚àí ‚àí ‚àí== == = = ‚à´ ‚à´ ‚à´ = =+‚àí= ‚àí‚àû‚àí t 0 st 0 st dt)t(f)t(g s )s(F dte)t(f s 1 ]e)t(g s 1 [ ‚à´ ‚àû ‚àí ‚àû<‚áí‚àû= 0 )()( dtetft st If t=0, g(t)=0 for so slower than‚à´ ‚àû ‚àû‚Üí= 0 )()( tgdttf 0‚Üí‚àíst e
- 19. Properties: Derivatives (this is the big one) )0(f)s(sF)}t(Df{L + ‚àí= Example : )}tsin({L 1s 1 1s )1s(s 1 1s s )0(f 1s s )}tcos(D{L 2 2 22 2 2 2 2 ‚àí= + ‚àí + +‚àí =‚àí + =‚àí + = + Proof : )s(sF)0(f dte)t(fs)]t(fe[ )t(fv,dt)t(f dt d dv sedu,eu dte)t(f dt d )}t(Df{L 0 st 0 st stst 0 st +‚àí =+ == ‚àí== = + ‚àû ‚àí‚àû‚àí ‚àí‚àí ‚àû ‚àí ‚à´ ‚à´ let
- 20. Difference in The values are only different if f(t) is not continuous @ t=0 Example of discontinuous function: u(t) )0(f&)0(f),0(f −+ 1)0(u)0(f 1)t(ulim)0(f 0)t(ulim)0(f 0t 0t == == == + − → + → −
- 21. ?)}t(fD{L 2 = )0('f)0(sF)s(Fs)0('f))0(f)s(sF(s )0('f)}t(Df{sL)0(g)s(sG)}t(gD{L )0('f)0(Df)0(g),t(Df)t(g 2 2 ‚àí‚àí=‚àí‚àí= ‚àí=‚àí== ===let )0(f)0(sf)0('fs)0(fs)s(Fs)}t(fD{L )'1n()'2n()2n()1n(nn ‚àí‚àí‚àí‚àí ‚àí‚àí‚àí‚àí‚àí= ÔÅå NOTE: to take you need the value @ t=0 for called initial conditions! We will use this to solve differential equations! ‚Üí‚àí‚àí )t(f),t(Df),...t(fD),t(fD 2n1n )}t(fD{L n Properties: Nth order derivatives
- 22. Properties: Nth order derivatives )0(f)s(sF)}t(Df{L −= )}t(fD{L 2 )0(f)s(sF)}t(Df{L)}t(g{L)s(G )0('f)0(g )t(Df)t(g )0(g)s(sG)}t(Dg{L )t(fD)t(Dgand)t(Df)t(g 2 −=== =∴ = −= == )0('f)0(sf)s(Fs)0('f)]0(f)s(sF[s)0(g)s(sG)}t(Dg{L 2 −−=−−=−=∴ .etc),t(fD),t(fD 43 Start with Now apply again let then remember Can repeat for )0(f)0(sf)0('fs)0(fs)s(Fs)}t(fD{L )'1n()'2n()2n()1n(nn −−−− −−−−−= 
- 23. Relevant Book Sections Modeling - 2.2 Linear Systems - 2.3, page 38 only Laplace - 2.4 Transfer functions – 2.5 thru ex 2.4