Lecture3
- 1. Interconnects • Shared address space and message passing computers can be constructed by connecting processors and memory unit using a variety of interconnection network • Dynamic/Indirect networks: – cross bar – bus based • Static/Direct networks: – completely connected – star connected – linear array – ring – mesh – hypercube
- 2. More on Interconnects • Dynamic Interconnect: Communication links are connected to one another dynamically by the switching elements to establish path among processors and memory banks. Normally used for share memory address space computers. • Static/Direct Interconnect : Consists of point to point communication links among processors. Typically used for message passing computers.
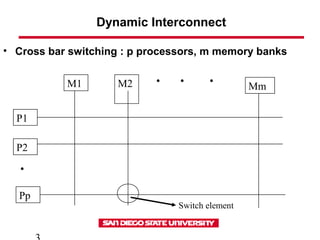
- 3. Dynamic Interconnect • Cross bar switching : p processors, m memory banks M1 M2 Mm P1 P2 Pp . . . . Switch element
- 4. Dynamic Interconnect • Cross Bar switch is a non blocking network i.e. connection of a processor to a memory bank does not block the connection of any other processor to any other memory bank. Total # of switching elements required is f(p*m) = approx f(p*p) (assuming p = m) As p complexity of switching network f(p*p) Cross bar switches are not scalable in terms of cost.
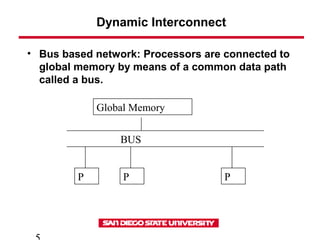
- 5. Dynamic Interconnect • Bus based network: Processors are connected to global memory by means of a common data path called a bus. Global Memory BUS P P P
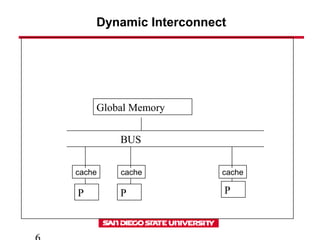
- 6. Dynamic Interconnect Global Memory BUS P P P cache cache cache
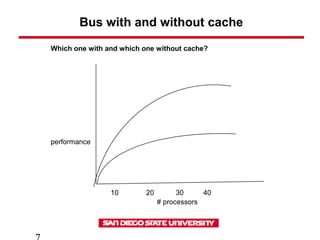
- 7. Bus with and without cache 10 20 30 40 # processors performance Which one with and which one without cache?
- 8. Dynamic Interconnect • Bus based network • Simplicity of construction • Provides uniform access to shared memory • Bus can carry limited amount of data between the memory and processors • As the number of processors increases each processor spends more time waiting for memory access while the bus is used by other processor
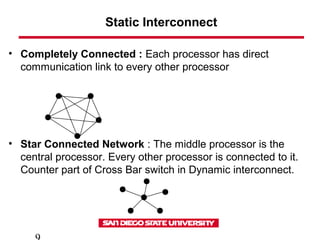
- 9. Static Interconnect • Completely Connected : Each processor has direct communication link to every other processor • Star Connected Network : The middle processor is the central processor. Every other processor is connected to it. Counter part of Cross Bar switch in Dynamic interconnect.
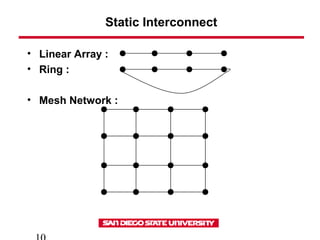
- 10. Static Interconnect • Linear Array : • Ring : • Mesh Network :
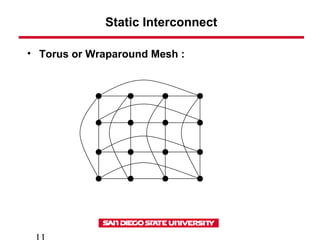
- 11. Static Interconnect • Torus or Wraparound Mesh :
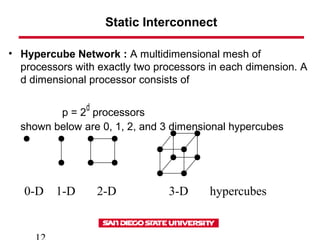
- 12. Static Interconnect • Hypercube Network : A multidimensional mesh of processors with exactly two processors in each dimension. A d dimensional processor consists of p = 2 d processors shown below are 0, 1, 2, and 3 dimensional hypercubes 0-D 1-D 2-D 3-D hypercubes
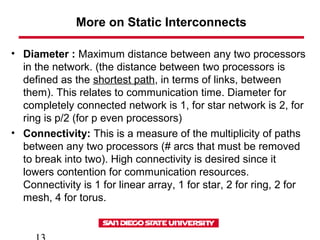
- 13. More on Static Interconnects • Diameter : Maximum distance between any two processors in the network. (the distance between two processors is defined as the shortest path, in terms of links, between them). This relates to communication time. Diameter for completely connected network is 1, for star network is 2, for ring is p/2 (for p even processors) • Connectivity: This is a measure of the multiplicity of paths between any two processors (# arcs that must be removed to break into two). High connectivity is desired since it lowers contention for communication resources. Connectivity is 1 for linear array, 1 for star, 2 for ring, 2 for mesh, 4 for torus.
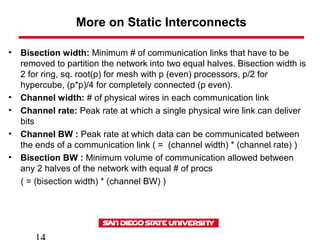
- 14. More on Static Interconnects • Bisection width: Minimum # of communication links that have to be removed to partition the network into two equal halves. Bisection width is 2 for ring, sq. root(p) for mesh with p (even) processors, p/2 for hypercube, (p*p)/4 for completely connected (p even). • Channel width: # of physical wires in each communication link • Channel rate: Peak rate at which a single physical wire link can deliver bits • Channel BW : Peak rate at which data can be communicated between the ends of a communication link ( = (channel width) * (channel rate) ) • Bisection BW : Minimum volume of communication allowed between any 2 halves of the network with equal # of procs ( = (bisection width) * (channel BW) )
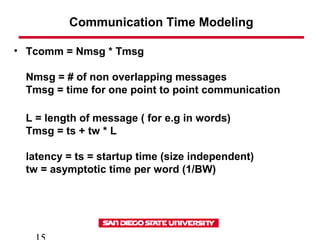
- 15. Communication Time Modeling • Tcomm = Nmsg * Tmsg Nmsg = # of non overlapping messages Tmsg = time for one point to point communication L = length of message ( for e.g in words) Tmsg = ts + tw * L latency = ts = startup time (size independent) tw = asymptotic time per word (1/BW)
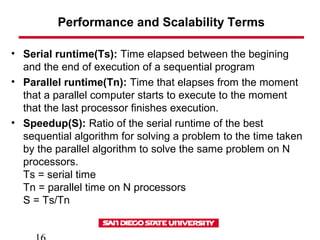
- 16. Performance and Scalability Terms • Serial runtime(Ts): Time elapsed between the begining and the end of execution of a sequential program • Parallel runtime(Tn): Time that elapses from the moment that a parallel computer starts to execute to the moment that the last processor finishes execution. • Speedup(S): Ratio of the serial runtime of the best sequential algorithm for solving a problem to the time taken by the parallel algorithm to solve the same problem on N processors. Ts = serial time Tn = parallel time on N processors S = Ts/Tn
- 17. Performance and Scalability Terms • Efficiency: Measure of the fraction of time for which a processor is usefully employed. Defined as the ratio of speedup to the number of processor. E = S/N • Amdahl’s law : discussed before • Scalability : An algorithm is scalable if the level of parallelism increases at least linearly with the problem size. An architecture is scalable if it continues to yield the same performance per processor, albeit used on a larger problem size, as the # of processors increases. Algorithm and architecture scalability are important since they allow a user to solve larger problems in the same amount of time by buying a parallel computer with more processors.
- 18. Performance and Scalability Terms • Superlinear speedup: In practice a speedup greater than N (on N processors) is called superlinear speedup. This is observed due to 1. Non optimal sequential algorithm 2. Sequential problem may not fit in one processor’s main memory and require slow secondary storage, whereas on multiple processors problem fits in main memory of N processors
- 19. Sources of Parallel Overhead • Interprocessor communication: Time to transfer data between processors is usually the most significant source of parallel processing overhead. • Load imbalance: In some parallel applications it is impossible to equally distribute the subtask workload to each processor. So at some point all but one processor might be done and waiting for one processor to complete. • Extra computation: Sometime the best sequential algorithm is not easily parallelizable and one is forced to use a parallel algorithm based on a poorer but easily parallelizable sequential algorithm. Sometimes repetitive work is done on each of the N processors instead of send/recv, which leads to extra computation.
- 20. CPU Performance Comparison MIPS = millions of instructions per second = IC / (execution time in second* 106 ) = clock rate / (CPI * 106 ) (IC = Instruction count for a program; CPI = CPU clock cycles for a program/ IC) MIPS is not an accurate measure for computing performance among computers : • MIPS is dependent on the instruction set, making it difficult to compare MIPS of computers with different instruction set • MIPS varies between programs on the same computer • MIPS can vary inversely to performance
- 21. CPU Performance Comparison # of floating point operations in a program MFLOPS = ---------------------------------------------------------------- execution time in seconds * 106 • MFLOPS (Millions of Floating Point Operations per Second) are dependent on the machine and on the program ( same program running on different computers would execute a different # of instructions but the same # of FP operations) • MFLOPS is also not a consistent and useful measure of performance because – Set of FP operations is not consistent across machines e.g. some have divide instructions, some don’t – MFLOPS rating for a single program cannot be generalized to establish a single performance metric for a computer
- 22. CPU Performance Comparison • Execution time is the principle measure of performance • Unlike execution time, it is tempting to characterize a machine with a single MIPS, or MFLOPS rating without naming the program, specifying I/O, or describing the version of OS and compilers