LINEAR TRANSFORMATION22.pdf
•
0 likes•46 views

1. A linear equation is an equation that has one or more variables with degree one. Matrix multiplication and Gaussian elimination are two methods to solve linear equations using matrices. 2. A system of linear equations can be represented by an augmented matrix, with each row representing one equation and each column representing a variable or constant term. 3. A linear system is homogeneous if multiplying the input by a constant also multiplies the output by the same constant. It is additive if the output of multiple inputs summed is equal to the sum of the individual outputs.
















LINEAR TRANSFORMATION22.pdf
- 1. LINEAR TRANSFORMATION Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 2. • A linear equation is an equation that has one or more variables having degree one. • Matrix multiplication method and gaussian elimination method are two methods to solve linear equations using matrices. Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com Ax=b
- 3. Representing a linear system with matrices A system of equations can be represented by an augmented matrix. In an augmented matrix, each row represents one equation in the system and each column represents a variable or the constant terms. In this way, we can see that augmented matrices are a shorthand way of writing systems of equations. The organization of the numbers into the matrix makes it unnecessary to write various symbols like x, y, z and =equals , yet all of the information is still there! Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com 2X+5Y=10 3X+4Y=24
- 4. Which system is represented by the augmented matrix? Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
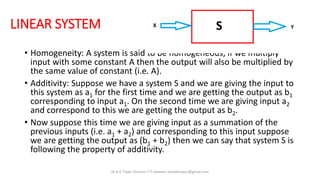
- 5. LINEAR SYSTEM • Homogeneity: A system is said to be homogeneous, if we multiply input with some constant A then the output will also be multiplied by the same value of constant (i.e. A). • Additivity: Suppose we have a system S and we are giving the input to this system as a1 for the first time and we are getting the output as b1 corresponding to input a1. On the second time we are giving input a2 and correspond to this we are getting the output as b2. • Now suppose this time we are giving input as a summation of the previous inputs (i.e. a1 + a2) and corresponding to this input suppose we are getting the output as (b1 + b2) then we can say that system S is following the property of additivity. S Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 6. principle of superposition Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 7. Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 8. 1.A matrix is a rectangular array of numbers while a vector is a mathematical quantity that has magnitude and direction. 2.A vector and a matrix are both represented by a letter with a vector typed in boldface with an arrow above it to distinguish it from real numbers while a matrix is typed in an upper- case letter. 3.Vectors are used in geometry to simplify certain 3D problems while matrices are key tools used in linear algebra. 4.A vector is an array of numbers with a single index while a matrix is an array of numbers with two indices. 5.While a vector is used to represent magnitude and direction, a matrix is used to represent linear transformations and keep track of coefficients in linear equations. P = xi + yj + zk. Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
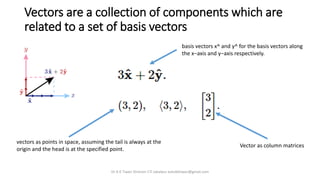
- 9. Vectors are a collection of components which are related to a set of basis vectors basis vectors x^ and y^ for the basis vectors along the x‚àíaxis and y‚àíaxis respectively. vectors as points in space, assuming the tail is always at the origin and the head is at the specified point. Vector as column matrices Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 10. THIS MATRIX HAS 3 VECTORS Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com Can we multiply matrix and vector ?
- 11. Linear Transformation When we multiply a matrix by a vector, this is what we called as Linear Transformation. Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 12. Rotate Stretch Compress Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
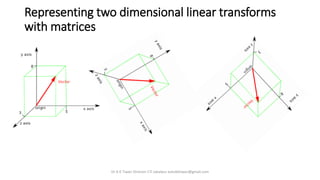
- 13. Representing two dimensional linear transforms with matrices Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 14. Representing three dimensional linear transforms with matrices Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 15. Representing two dimensional linear transforms with matrices Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 16. Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 17. Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 18. (eigen- meaning own, belonging to oneself, in German) • The eigenvectors are the directions in which the matrix acts solely as a scaling transformation, and the eigenvalues are the corresponding scale factors. • eigenvectors of a matrix are those direction in the space that after the matrix operating on them, they supply the same direction with some coefficient of proportionality between "old" and "new" direction that are eigenvalues. • The eigen functions represent stationary states of the system i.e. the system can achieve that state under certain conditions and eigenvalues represent the value of that property of the system in that stationary state. • the eigenvectors are the special directions where the linear operator A simply acts through scaling. • Each Eigenvalue has a set of eigenvectors. • Eigenvalues and eigenvectors are linearly dependent Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com
- 19. Eigenvalue =2 , eigenvector P = 2 2 Same direction Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com EXPAND 2 times
- 20. EXAMPLE Dr A K Tiwari Director CTI Jabalpur ashokktiwari@gmail.com