



![ķv▀B蹊┐
? sparse inverse covariance matrixż“żŌż─
GGMż╬L1-regularized maximum likelihood
estimatorż╬č¦┴Ģå¢Ņ}żŽgraphical lasso
(Glasso)ż╬å¢Ņ}ż╚ų¬żķżņżļ
©C Friedman et al. (2008)
©C Ravilumar et al. (2011)
? żóżļincoherence conditionż╬Ž┬żŪż╬model selection
consistencyż╦ż─żżżŲ蹊┐(sparsistency)
©C Rothman et al. (2008)
? äeż╬źóźūźĒ®`ź┴ż╚żĘżŲmulti-resolution
extension of GGM
©C Choi et al. (2010)
©C Choi et al. (2011)Ż║ź░źķźšźŻź½źļźŌźŪźļż╬Ū▒į┌Ą─
ż╩─Šśŗįņż“┐╝æ]
©C ż╔ż┴żķż╬źŌźŪźļżŌėŗ╦Ńä┐┬╩Ą─ż╩č¦┴Ģż╚═Ųšō
©C żĘż½żĘŪ▒į┌śŗįņżŽ─ŠśŗįņųŲ╝s](https://image.slidesharecdn.com/lvggmicml2014-140702011911-phpapp01/85/Learning-Latent-Variable-Gaussian-Graphical-Models-7-320.jpg)






![Summary
? GGMż╬┴╝żĄżŪżóżļź╣źč®`ź╣ąįż╦╝ėż©żŲŻ¼
Ū▒į┌ēõ╩²żŪglobal effectżŌ┐╝æ]żŪżŁżļ
źŌźŪźļż╬╠ß░Ė
? ż”ż▐żżą╬żŪČ©╩Į╗»ż╣żļż│ż╚żŪ»Eąą┴ąż╚Ą═
źķź¾ź»ąą┴ąż╦ĘųĮŌ
? ż¬ż½ż▓żŪźčźķźß®`ź┐═ŲČ©ż¼╝╚═∙蹊┐ż╬ĘĮ
Ę©ż“╩╣ż©żļ╔Žż╦Ż¼Š½Č╚▒Żį^żĄżņż┐═ŲČ©źč
źķźß®`ź┐ż¼Ą├żķżņżļ
? GGMż╬å¢Ņ}ĄŃż¼ĮŌøQŻĪ](https://image.slidesharecdn.com/lvggmicml2014-140702011911-phpapp01/85/Learning-Latent-Variable-Gaussian-Graphical-Models-14-320.jpg)
![[DL▌åši╗ß]Control as Inferenceż╚░kš╣](https://cdn.slidesharecdn.com/ss_thumbnails/20191004-191204055019-thumbnail.jpg?width=560&fit=bounds)


























More Related Content
What's hot (20)
Learning Latent Variable Gaussian Graphical Models
- 1. Learning Latent Variable Gaussian Graphical Models Meng, Z., Eriksson, B., Hero III, A. O. ICML2014 2014/07/01 @harapon
- 2. (sparse) GGMż╬źŌź┴ź┘®`źĘźńź¾ ? Large p, small n problem ©C š²ät╗»ż╬ż┐żßĄ═┤╬į¬śŗįņż“šnż╣ż╬ż¼ę╗░ŃĄ─ źóźūźĒ®`ź┴(Negahban et al. 2012) ? ź¼ź”ź╣Ęų▓╝źŪ®`ź┐ż╦ż¬ż▒żļųąą─Ą─å¢Ņ}żŽ inverse covariance matrix(Š½Č╚ąą┴ą) ż╬═ŲČ© ėQ£y źĄź¾źūźļ╩² n źŪ®`ź┐ż╬┤╬į¬╩²p
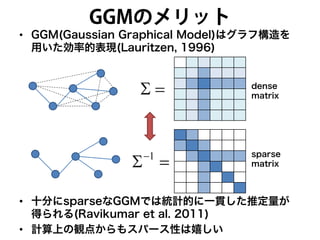
- 3. GGMż╬źßźĻź├ź╚ ? GGM(Gaussian Graphical Model)żŽź░źķźšśŗįņż“ ė├żżż┐ä┐┬╩Ą─▒Ē¼F(Lauritzen, 1996) ? ╩«Ęųż╦sparseż╩GGMżŪżŽĮyėŗĄ─ż╦ę╗ž×żĘż┐═ŲČ©┴┐ż¼ Ą├żķżņżļ(Ravikumar et al. 2011) ? ėŗ╦Ń╔Žż╬ėQĄŃż½żķżŌź╣źč®`ź╣ąįżŽµężĘżż =”▓ =”▓?1 dense matrix sparse matrix
- 4. GGMż╬šnŅ} ? żĘż½żĘŻ¼šµż╬źŪ®`ź┐Ęų▓╝żŽsparse GGMżŪ żŽż”ż▐ż»Į³╦ŲżŪżŁżŲżżż╩żżż½żŌżĘżņż╩żżŻĪ ? żĮż│żŪŻ¼ś╦£╩Ą─ż╩sparse GGMż“ÆłÅłżĘż┐ Ė▀┤╬į¬GGMż╚żĘżŲŻ¼global effectż╚local interactionż╬╦½ĘĮż“ÆQż”źŌźŪźļż“┐╝ż©żļ ? ż└ż¼global effectż“ī¦╚ļż╣żļż╚ų▄▐x╗»żĘż┐ ż╚żŁż╦żĮż╬Š½Č╚ąą┴ąż¼ź╣źč®`ź╣żŪżŽż╩ż»ż╩żļŻ« ? żĮż”ż╩żļż╚Ż¼▒»żĘżżż│ż╚ż╦Ż¼¼Fį┌ż╬sparse GGMż╬ėŗ╦ŃĘ©ż¼▀mė├żŪżŁż╩ż»ż╩żļ
- 5. LVGGMż╬╠ß░Ė ? ż│ż╬å¢Ņ}ż“ĮŌøQż╣żļż┐żßż╦ LVGGM(Latent Variable GGM)ż“╠ß░Ė ©C global effectżŽŪ▒į┌ēõ╩²żŪ ©C local interactionżŽsparse GGMżŪ▒Ē¼F ? LVGGMż╬ų▄▐x╗»Š½Č╚ąą┴ążŽsparseż╚ low-rank structureż¼▒Żż┐żņżļż╬żŪŻ¼ regularized ML approachż¼╩╣ż©żļ ©C ż│żņżŽsparse GGMż╬┴╝żżč¦┴ĢĘ© (Chandrasekaran et al. 2012)
- 6. LVGGMż╬µężĘżĄż╬ĮYšōż“Ž╚ż╦ ? īØ╩²ė╚Č╚ķv╩²ż¼ż█ż▄ÅŖżż═╣ąįż“żŌż─ż╬żŪ ĘŪØuĮ³źčźķźß®`ź┐ż╬ź©źķ®`Š│Įńż¼Ą├żķżņ żļŻ« ? ż│żņżŽunstructured dense GGMż╬ ź©źķ®`Š│Įńż╚▒╚ż┘żļż╚╩«Ęųż╦╦┘ż»ģ¦╩°
- 7. ķv▀B蹊┐ ? sparse inverse covariance matrixż“żŌż─ GGMż╬L1-regularized maximum likelihood estimatorż╬č¦┴Ģå¢Ņ}żŽgraphical lasso (Glasso)ż╬å¢Ņ}ż╚ų¬żķżņżļ ©C Friedman et al. (2008) ©C Ravilumar et al. (2011) ? żóżļincoherence conditionż╬Ž┬żŪż╬model selection consistencyż╦ż─żżżŲ蹊┐(sparsistency) ©C Rothman et al. (2008) ? äeż╬źóźūźĒ®`ź┴ż╚żĘżŲmulti-resolution extension of GGM ©C Choi et al. (2010) ©C Choi et al. (2011)Ż║ź░źķźšźŻź½źļźŌźŪźļż╬Ū▒į┌Ą─ ż╩─Šśŗįņż“┐╝æ] ©C ż╔ż┴żķż╬źŌźŪźļżŌėŗ╦Ńä┐┬╩Ą─ż╩č¦┴Ģż╚═Ųšō ©C żĘż½żĘŪ▒į┌śŗįņżŽ─ŠśŗįņųŲ╝s
- 8. LVGGMż╬Č©┴x ? Ū▒į┌ēõ╩²ż╬ī¦╚ļ ©C sparse GGMżŽźŪ®`ź┐ż╦īØżĘżŲÅŖżżüóČ©żŪ żóż├ż┐ż┐żßŻ¼real world observationż“ ż”ż▐ż»šh├„ż╣żļż┐żßż╦ź╣źč®`ź╣ąįż“ŲŲē▓ ? ēõ╩²Č©┴x ©C p┤╬į¬ėQ£yź┘ź»ź╚źļ ©C r┤╬į¬Ū▒į┌ēõ╩²ź┘ź»ź╚źļ Ox Lx ),( LO xxx =
- 9. LVGGMż╬╣▓Ęų╔óąą┴ą?Š½Č╚ąą┴ą ? ╣▓Ęų╔óąą┴ą ? Š½Č╚ąą┴ą ? ėQ£yēõ╩²ż╬╣▓Ęų╔óąą┴ą ©C Ū▒į┌ēõ╩²żŪų▄▐x╗»ż╣żļż╚ź¼ź”ź╣Ęų▓╝ż╬ż▐ż▐ ? ėQ£yēõ╩²ż╬Š½Č╚ąą┴ą ? ż│ż╬żĶż”ż╩śŗįņż╬źŌźŪźļż“LVGGMż╚║¶żų ”Ė 1? ”Ė=J OO,”Ė=”▓ OLLLLOOO JJJJ , 1 ,,, 1 ?? ?=”▓=”© LS += (Ī∙źĘźÕ®`źóż╬čaąą┴ą) ź╣źč®`ź╣ąą┴ą Ą═źķź¾ź»ąą┴ą
- 10. LVGGMż╬╣▓Ęų╔óąą┴ą?Š½Č╚ąą┴ą ? Ū▒į┌ēõ╩²ż╬╩²żŽėQ£yēõ╩²ż╬╩²ż╚▒╚ż┘żŲ ╩«ĘųąĪżĄżżż╚üóČ©(r << p) ? ėQ£yēõ╩²ż╚Ū▒į┌ēõ╩²ż╬ķgż╦żŽź╣źč®`ź╣ż╬ üóČ©żŽ▓╗ę¬ ? żĶż├żŲp pąą┴ąż╬LżŽĄ═źķź¾ź»ż½ż─├▄ąą┴ą ? ż│ż╬żĶż”ż╦ų▄▐x╗»Š½Č╚ąą┴ą ż“ ©C sparse matrix S ©C low-rank dense matrix L ©C ż╦ĘųĮŌż╣żļż│ż╚ż¼═ŲČ©ż╬ż┐żßż╬key property ”©
- 11. Regularized ML estimation of LVGGM ? nźĄź¾źūźļ ż╦īØżĘżŲźŪ®`ź┐ąą┴ą ? žōż╬īØ╩²ė╚Č╚ķv╩²żŽ ©C ż│ż│żŪ żŽźĄź¾źūźļż╬╣▓Ęų╔óąą┴ą ? š²ät╗»ūŅė╚═ŲČ©żŽ┤╬ż╬─┐Ą─ķv╩²ż“ūŅąĪ╗» ©C š²ät╗»ķv╩² żŽsparse + low-rankśŗįņ ż“ŠS│ųż╣żļżĶż”ż╦įOėŗżĄżņżļ nxxx L,, 21 X )det(log,?);( ”©?”©”▓=”© XL XX n T1? Īį”▓ )();( ”©+”© RXL ”╦ )(”©R
- 12. Regularized ML estimation of LVGGM ? Chandrasekaren et al. (2012)ż╚═¼śö ┤╬ż╬żĶż”ż╩š²ät╗»ūŅė╚═ŲČ©ż“┐╝ż©żļ ? ż│żņżŽ═╣ūŅ▀m╗»å¢Ņ}żŪżóżĻŻ¼Ma et al. (2013)ż╬ĘĮĘ©ż“╩╣ż©żąĮŌż▒żļŻĪ ©C įö╝ÜżŽMa et al.(2013)▓╬šš )(Tr);(min 1, LSXLSL LS ”╠”╦ +++ ..ts 0fL? 0, 0 > + ”╠”╦ fLS
- 13. ═ŲČ©źčźķźß®`ź┐ż╬error bound ? ═ŲČ©źčźķźß®`ź┐ż╬error boundż“└ĒšōĄ─ ż╦į^├„ ? įuü²īg“YżŪżŌ┤_šJ
- 14. Summary ? GGMż╬┴╝żĄżŪżóżļź╣źč®`ź╣ąįż╦╝ėż©żŲŻ¼ Ū▒į┌ēõ╩²żŪglobal effectżŌ┐╝æ]żŪżŁżļ źŌźŪźļż╬╠ß░Ė ? ż”ż▐żżą╬żŪČ©╩Į╗»ż╣żļż│ż╚żŪ»Eąą┴ąż╚Ą═ źķź¾ź»ąą┴ąż╦ĘųĮŌ ? ż¬ż½ż▓żŪźčźķźß®`ź┐═ŲČ©ż¼╝╚═∙蹊┐ż╬ĘĮ Ę©ż“╩╣ż©żļ╔Žż╦Ż¼Š½Č╚▒Żį^żĄżņż┐═ŲČ©źč źķźß®`ź┐ż¼Ą├żķżņżļ ? GGMż╬å¢Ņ}ĄŃż¼ĮŌøQŻĪ
- 15. References 1. Lauritzen, S.L. Graphical models, volume 17. Oxford University Press, USA, 1996. 2. Ravikumar, Pradeep, Wainwright, Martin J, Raskutti, Garvesh, and Yu, Bin. High- dimensional covariance estimation by minimizing l1-penalized log-determinant di- vergence. Electronic Journal of Statistics, 5:935-980, 2011. 3. Chandrasekaran, Venkat, Parrilo, Pablo A, and Willsky, Alan S. Latent variable graphical model selection via convex optimization. Annals of Statistics, 40(4):1935-1967, 2012. 4. Friedman, Jerome, Hastie, Trevor, and Tibshirani, Robert. Sparse inverse covariance estimation with the graphical lasso. Biostatistics, 9(3):432-441, 2008. 5. Rothman, Adam J, Bickel, Peter J, Levina, Elizaveta, and Zhu, Ji. Sparse permutation invariant covariance estimation. Electronic Journal of Statistics, 2:494-515, 2008. 6. Choi, Myung Jin, Chandrasekaran, Venkat, and Willsky, Alan S. Gaussian multiresolution models: Exploiting sparse Markov and covariance structure. Signal Processing, IEEE Transactions on, 58(3):1012-1024, 2010. 7. Choi, Myung Jin, Tan, Vincent YF, Anandkumar, Animashree, and Willsky, Alan S. Learning latent tree graphical models. Journal of Machine Learning Research, 12:1729-1770, 2011. 8. Ma, Shiqian, Xue, Lingzhou, and Zou, Hui. Alternating direction methods for latent variable Gaussian graphical model selection. Neural computation, 25(8):2172-2198, 2013.