³¾²ś“Ē³Ł2.0½Ģѧ-ĶÓĀŻŅĒÓėČžÖį¼ÓĖŁ¼ĘÓ¦ÓĆ.±č»å“Ś
?
3 likes?663 views

CyberPiĶÓĀŻx·eľÖøĮī, ŌOÓmBot2Öø±±Ü, ŌOÓmBot2ówøŠæŲÖĘ×Ō×ßÜ, CyperPi 3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī, ŌOÓmBot2ŹÖuņÓ×Ō×ßÜ








![? ĻņÉĻ]Ó (Waved up)
? Ļņ×ó]Ó (Waved to the left)
? ĻņĻĀ]Ó (Waved down)
? ĻņÓŅ]Ó (Waved to the right)
3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī 2/4
19](https://image.slidesharecdn.com/mbot2-221115044906-12b0508d/85/mbot2-0-pdf-19-320.jpg)

![? ×xČ”]Ó½Ē¶ČÖµ
? ×xČ”]ÓĖŁ¶Č (0~100)
? ×xČ”u»ĪĮ¦µĄ (0~100)
3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī 4/4
-90”ć 90”ć
0”ć
180”ć
21](https://image.slidesharecdn.com/mbot2-221115044906-12b0508d/85/mbot2-0-pdf-21-320.jpg)




³¾²ś“Ē³Ł2.0½Ģѧ-ĶÓĀŻŅĒÓėČžÖį¼ÓĖŁ¼ĘÓ¦ÓĆ.±č»å“Ś
- 1. ĶÓĀŻxÅc3ŻS¼ÓĖŁ¶ČÓŖÓĆ Revised on November 15, 2022 ? ĶÓĀŻx·eľÖøĮī ? ŌOÓÖø±±Ü ? ŌOÓówøŠæŲÖĘ×Ō×ßÜ ? 3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī ? ŌOÓŹÖuņÓ×Ō×ßÜ
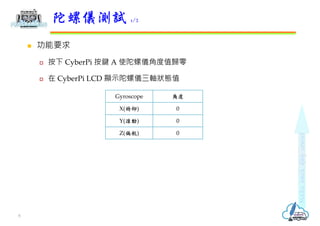
- 2. ? CyberPi Č½ØĶÓĀŻx (Gyroscope) ¼°3ŻS¼ÓĖŁ¶ČÓ ĶÓĀŻxŗĶ3ŻS¼ÓĖŁ¶ČÓ ĶÓĀŻxŗĶ3ŻS¼ÓĖŁ¶ČÓ 2
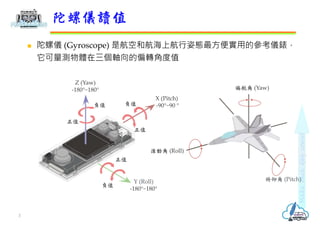
- 3. ? ĶÓĀŻx (Gyroscope) ŹĒŗ½æÕŗĶŗ½ŗ£ÉĻŗ½ŠŠ×ĖB×ī·½±ćÓĆµÄ ¢æ¼xål£¬ ĖüæÉĮæyĪļówŌŚČżŻSĻņµÄĘ«ŽD½Ē¶ČÖµ ĶÓĀŻx×xÖµ ø©Ńö½Ē (Pitch) LÓ½Ē (Roll) Ę«ŗ½½Ē (Yaw) X (Pitch) -90”ć~90 ”ć Z (Yaw) -180”ć~180”ć Y (Roll) -180”ć~180”ć ÕżÖµ ŲÖµ ŲÖµ ŲÖµ ÕżÖµ ÕżÖµ 3
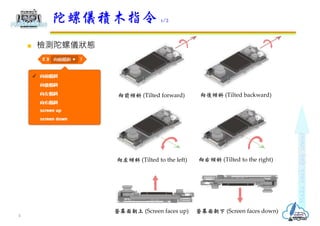
- 4. ? zyĶÓĀŻx īB ĶÓĀŻx·eľÖøĮī 1/2 ĻņĒ°AŠ± (Tilted forward) ĻņįįAŠ± (Tilted backward) Ļņ×óAŠ± (Tilted to the left) ĻņÓŅAŠ± (Tilted to the right) ĪÄ»Ćę³ÆÉĻ (Screen faces up) ĪÄ»Ćę³ÆĻĀ (Screen faces down) 4
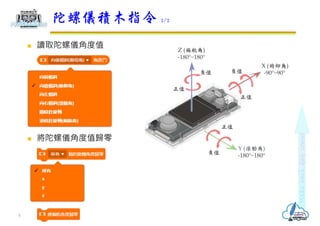
- 5. ? ×xČ”ĶÓĀŻx½Ē¶ČÖµ ? ¢ĶÓĀŻx½Ē¶ČÖµwĮć ĶÓĀŻx·eľÖøĮī 2/2 5 X (ø©Ńö½Ē) -90”ć~90”ć Z (Ę«ŗ½½Ē) -180”ć~180”ć Y (LÓ½Ē) -180”ć~180”ć ÕżÖµ ŲÖµ ŲÖµ ŲÖµ ÕżÖµ ÕżÖµ
- 6. ĶÓĀŻxyŌ 1/2 ? ¹¦ÄÜŅŖĒó ? °“ĻĀ CyberPi °“ęI A Ź¹ĶÓĀŻx½Ē¶ČÖµwĮć ? ŌŚ CyberPi LCD ļ@Ź¾ĶÓĀŻxČżŻS īBÖµ Gyroscope ½Ē¶Č X(ø©Ńö) 0 Y(LÓ) 0 Z(Ę«ŗ½) 0 6
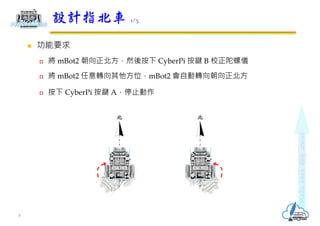
- 8. ? ¹¦ÄÜŅŖĒó ? ¢ mBot2 ³ÆĻņÕż±±·½£¬Č»įį°“ĻĀ CyberPi °“ęI B Š£ÕżĶÓĀŻx ? ¢ mBot2 ČĪŅāŽDĻņĘäĖū·½Ī»£¬mBot2 ž×ŌÓŽDĻņ³ÆĻņÕż±±·½ ? °“ĻĀ CyberPi °“ęI A£¬Ķ£Ö¹Ó×÷ ŌOÓÖø±±Ü 1/3 ±± ±± 8
- 9. ? ¢æ¼³ĢŹ½ ? ½ØĮ¢ yaw ×µ ? ŠĀŌö”øYawĘ«ŗ½½Ē”¹·e±¾ÖøĮī ŌOÓÖø±±Ü 2/3 9
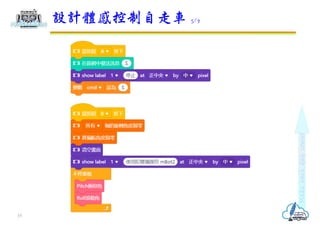
- 11. ? ¹¦ÄÜŅŖĒó ? CyberPi Ę½·Å£¬°“ĻĀ CyberPi °“ęI B Š£ÕżĶÓĀŻx ? ¢ CyberPi ĻņĒ°A£¬Ź¹ mBot2 Ē°ßM ? ¢ CyberPi ĻņįįŃö£¬Ź¹ mBot2 įįĶĖ ? ¢ CyberPi ĻņÓŅAŠ±£¬Ź¹ mBot2 ÓŅĒ°ßM ? ¢ CyberPi Ļņ×óAŠ±£¬Ź¹ mBot2 ×óĒ°ßM ? °“ĻĀ CyberPi °“ęI A£¬Ź¹ mBot2 Ķ£Ö¹ ŌOÓówøŠæŲÖĘ×Ō×ßÜ 1/7 11
- 14. ? CyberPi ¶Ė ¢æ¼³ĢŹ½ ? ½ØĮ¢ cmd ×µ ? ŠĀŌö·eľÖøĮī ŌOÓówøŠæŲÖĘ×Ō×ßÜ 4/7 14
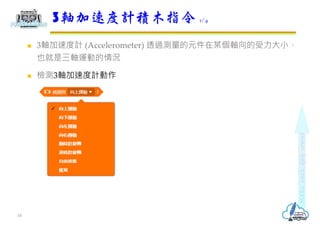
- 18. ? 3ŻS¼ÓĖŁ¶ČÓ (Accelerometer) Ķøß^yĮæµÄŌŖ¼žŌŚÄ³ŻSĻņµÄŹÜĮ¦“󊔣¬ Ņ²¾ĶŹĒČżŻSß\ÓµÄĒér ? zy3ŻS¼ÓĖŁ¶ČÓÓ×÷ 3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī 1/4 18
- 19. ? ĻņÉĻ]Ó (Waved up) ? Ļņ×ó]Ó (Waved to the left) ? ĻņĻĀ]Ó (Waved down) ? ĻņÓŅ]Ó (Waved to the right) 3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī 2/4 19
- 20. ? ķrįŠżŽD (Rotated clockwise) ? ×ŌÓɵōĀä (Falling down) ? ÄęrįŠżŽD (Rotated counterclockwise) ? u»Ī (Shaken) 3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī 3/4 20
- 21. ? ×xČ”]Ó½Ē¶ČÖµ ? ×xČ”]ÓĖŁ¶Č (0~100) ? ×xČ”u»ĪĮ¦µĄ (0~100) 3ŻS¼ÓĖŁ¶ČÓ·eľÖøĮī 4/4 -90”ć 90”ć 0”ć 180”ć 21
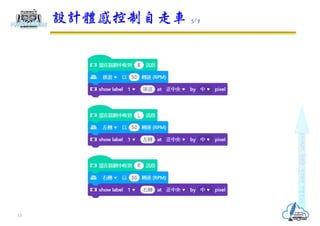
- 22. ? ¹¦ÄÜŅŖĒó ? »ĪÓ CyberPi ņÓ mBot2 Ē°ßM£¬»ĪÓĖŁ¶ČÓśæģ£¬mBot2 ĖŁ¶ČÓśæģ ? °“ĻĀ CyberPi °“ęI A£¬Ź¹ mBot2 Ķ£Ö¹ ŌOÓŹÖuņÓ×Ō×ßÜ 1/4 22
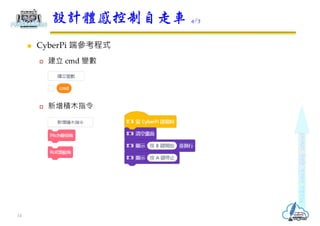
- 25. ? CyberPi ¶Ė ¢æ¼³ĢŹ½ ? ½ØĮ¢ speed ×µ ŌOÓŹÖuņÓ×Ō×ßÜ 4/4 25