MEDICON 2013 - Single Incision Laparoscopic Surgery Using a Miniature Robotic System

This paper presents a robotic system aimed at solving the main drawbacks of Single Incision Laparoscopic Surgery. The system is composed of a miniature camera robot, a lighting robot to provide efficient illumination to the scene, and a robotic grasper. These devices are introduced into the abdominal cavity through the single port, and are attached to the abdominal wall by magnetic interaction. Two external robotic arms, at which end effector the magnetic holders are attached, are used to guide the internal devices along the abdominal wall. Camera and lighting robots are handled by voice commands, whereas the robotic grasper is teleoperated with a haptic device. An in-vitro experiment to compare the advantages of using this system versus a traditional procedure is developed.













MEDICON 2013 - Single Incision Laparoscopic Surgery Using a Miniature Robotic System
- 1. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines Irene Rivas Blanco M. Cuevas-Rodriguez, E. Bauzano, J. Gomez-deGabriel, V.F. Mu├▒oz Department of System Engineering and Automation University of M├Īlaga (Spain) SINGLE INCISION LAPAROSCOPIC SURGERY USING A MINIATURE ROBOTIC SYSTEM
- 2. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines I. INTRODUCTION II. SYSTEM DESCRIPTION III. EXPERIMENTS IV.CONCLUSIONS & FUTURE WORK INDEX
- 3. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines I. INTRODUCTION ŌĆó Single Incision Laparoscopic Surgery (SILS) Loss of triangulation between camera and instruments Limitation of the range of motion of instruments outside the abdomen
- 4. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines I. INTRODUCTION Magnetic holder Robotic arm Robotic arm Magnetic holder Robotic grasper Magnetic holder Lighting robot Entry port Camera robot ŌĆó Robotic system for SILS
- 5. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines II. SYSTEM DESCRIPTION Wrist attachment Magnetic holders Camera robot Lighting robot Pan Tilt -42┬║ 42┬║ C B A ŌĆó Camera and lighting robots
- 6. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines II. SYSTEM DESCRIPTION 12 cm 3,5cm 2 cm Lighting robot - 6 LEDs - 2 x 3V batteries - 2 hours of autonomy 4,5cm Camera robot - Wireless camera - 6 LEDs - 7 x 1.3V batteries - 2 hours of autonomy
- 7. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines II. SYSTEM DESCRIPTION
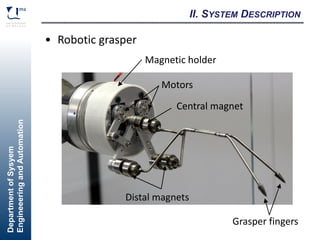
- 8. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines II. SYSTEM DESCRIPTION ŌĆó Robotic grasper Magnetic holder Motors Central magnet Distal magnets Grasper fingers
- 9. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines II. SYSTEM DESCRIPTION
- 10. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines III. EXPERIMENTS ŌĆó Task: tumor retraction 1. Retract the gall bladder 2. Cutting 3. Retract the tumor ŌĆó Aim of the experiment - To compare the performance of the task with the robotic system versus a traditional environment (human assistant) - Measured variable: time employed to perform the task by 5 users
- 11. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines III. EXPERIMENTS ŌĆó Traditional environment ŌĆÉ The assistant holds the camera and a grasper tool ŌĆÉ Extra incision for the additional grasper ŌĆÉ Mean time: 2 minutes 56 seconds
- 12. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines III. EXPERIMENTS ŌĆó Robotic environment ŌĆÉ The assistant teleoperates the robotic grasper ŌĆÉ No need of an extra incision ŌĆÉ Mean time: 2 minutes 53 seconds
- 13. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines III. CONCLUSIONS AND FUTURE WORK ŌĆÉ The camera robot solves the problem of the loss of triangulation and reduces the number of instruments sharing the single port ŌĆÉ The lighting system provides more illumination to the operation area ŌĆÉ The robotic grasper avoids the need of an extra incision when more than two instruments are required ŌĆÉ Reduce the overall size of the camera robot ŌĆÉ Provide the robotic grasper with force sensor at the tip ŌĆó Conclusions ŌĆó Future Work
- 14. DepartmentofSysyem EngineeeringandAutomation V├Łctor F. Mu├▒oz Mart├Łnez Research lines THANK YOU FOR YOUR ATTENTION