MIPI DevCon Bangalore 2017: MIPI M-PHY Gear4 and Its Impact on UniPort/UFS
0 likes341 views

The document discusses the MIPI M-PHY and UniPro specifications, focusing on Gear 4 attributes, burst states, and the significance of minimum save configuration time capability for efficient data transmission. It outlines changes across various versions, with emphasis on new features, timing adjustments, and deprecated functionalities in UniPro version 1.8. Additionally, it covers the universal flash storage (UFS) support for various gears and the corresponding clock considerations for high-speed data transfers.



![© 2017 MIPI Alliance, Inc.
PACP Changes
• Gear 4
– PACP_PWR-REQ/CNF
• Added value of 4 in the TX/RXGear field
• Adapt
– PACP_PWR-REQ/CNF
• This field indicates the presence of ADAPT and type of ADAPT range (Fine or Course) selected for the current
Power Mode Change
• PACP_CAP_ind
– MaxHS
• This field shall be ignored by the PA receiver if PACP_CAP_EXT2_ind is received.
• Instead, the MaxHS field of PACP_CAP_EXT2_ind shall be used.
• If TX_HSGEAR_Capability is returned with value 4 or above, the PA transmitter shall set this field with value 2b’11
• In all other cases, the PA transmitter shall set this field with the value retrieved from TX_HSGEAR_Capability[1:0].
13
Teledyne LeCroy](https://image.slidesharecdn.com/bangalore-teledyne-lecroy-m-phy-gear4-and-its-impact-on-uniport-ufs-171110194929/85/MIPI-DevCon-Bangalore-2017-MIPI-M-PHY-Gear4-and-Its-Impact-on-UniPort-UFS-13-320.jpg)

![© 2017 MIPI Alliance, Inc.
• PWM Burst
• A UFS device shall support the PWM-G1 (default, mandated by [M-PHY]), PWM-G2, PWM-G3
and PWM-G4 GEARS.
• The PWM-G5, PWM-G6 and PWM-G7 are optional.
– Even if the physical layer supports PWM-G0, this gear can not be used because it is not supported by UniPro
• The PWM-G1 is the active gear by default after power up or reset.
• SUBLINKS in a LINK may communicate with different PWM-GEAR or HS-GEAR.
• LS Prepare Length Control
• The TX_LS_PREPARE_LENGTH M-PHY configuration attribute defines the time to move from
SLEEP to PWM-BURST.
• At reset, M-TX sets TX_LS_PREPARE_LENGTH = 10.
23
Teledyne LeCroy](https://image.slidesharecdn.com/bangalore-teledyne-lecroy-m-phy-gear4-and-its-impact-on-uniport-ufs-171110194929/85/MIPI-DevCon-Bangalore-2017-MIPI-M-PHY-Gear4-and-Its-Impact-on-UniPort-UFS-23-320.jpg)

MIPI DevCon Bangalore 2017: MIPI M-PHY Gear4 and Its Impact on UniPort/UFS
- 1. Roy Chestnut Director, Technical Marketing Teledyne LeCroy MIPI M-PHY® Gear4 and its impact on MIPI UniPortSM/UFS
- 2. © 2017 MIPI Alliance, Inc. Agenda • MIPI M-PHY • MIPI UniPro • UFS 2 Teledne LeCroy
- 3. © 2017 MIPI Alliance, Inc. MIPI M-PHY – Bursts and Gears – Gear 4 – New Attributes • Min_SAVE_Config_Time_Capability – ADAPT 3
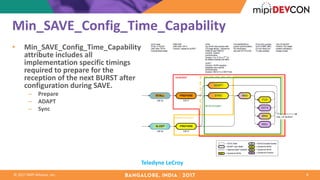
- 4. © 2017 MIPI Alliance, Inc. Burst States • Burst States – Data transmission occurs in BURSTs with power saving states between BURSTs. – BURSTs can be transferred in HS-MODE or LS-MODE – The Min_SAVE_Config_Time_Capability attribute includes all implementation specific timings required to prepare for the reception of the next BURST after configuration during SAVE. – Each BURST starts from the SAVE state for that operating mode, with a transition from DIF-N to DIF-P. – After a period of DIF-P called PREPARE, a sequence of 8b10b encoded symbols – After the last 8b10b SYMBOL of the BURST either a series of b0s or a series of b1s (TAIL-OF- BURST) is transmitted. – A series of equal bits violate 8b10b code characteristics, and indicates whether the M-RX returns to the SAVE state of the current operating mode or enters LINE-CFG. – In the case of PWM signaling, the last bit of the sequence is inverted to indicate the end of LINE activity. 4 Teledyne LeCroy
- 5. © 2017 MIPI Alliance, Inc. Gears and Rates • HS-GEARs – A MODULE in HS-BURST shall only operate at the defined data rate, DRHS. – There are two RATE series, A and B, where each step in the series scales by a factor of two – RATES are used for Limiting EMI with the Cellular modem. – A MODULE that includes HS-MODE shall support both RATEs of a GEAR. – A MODULE supporting HS-MODE shall support HS-G1. If a higher GEAR is supported all lower GEARs shall be supported as well. 5 Teledyne LeCroy
- 9. © 2017 MIPI Alliance, Inc. ADAPT • ADAPT – The ADAPT sub-state is intended for the RX equalizer training – If an M-RX supports ADAPT, the PREPARE sub-state may be followed by the ADAPT sub-state for HS-G4. – ADAPT sequence starts with MK0 followed by an 8b10b encoded PRBS9 pattern – ADAPT sequence is completed by one b0 bit. – The 8b10b PRBS9 ADAPT sequence repeats every 650 bits. – ADAPT sub-state ends with the transmission of a TAIL-OF-BURST – M-RX and M-TX shall return to the STALL state. 9 Teledyne LeCroy
- 10. © 2017 MIPI Alliance, Inc. ADAPT • During initial discovery, the local protocol requests and reads capabilities of MODULEs on both sides of the LINK. • If HS-G4 equalizer capability is detected on both sides, updates the remote M-RX ADAPT length capability into its local M-TX ADAPT length configuration. – TX_HS_ADAPT_Length >= RX_HS_ADAPT_INITIAL_Capability • The local protocol shall update the following setting for a Refresh ADAPT: – TX_HS_ADAPT_Length >= RX_HS_ADAPT_REFRESH_Capability • When a HS-G4 BURST is initiated and ADAPT has been configured the M-TX transitions from PREPARE to the ADAPT sub-state instead of SYNC. • The M-TX transitions from DIF-P to transmitting the ADAPT sequence. • Both M-TX and M-RX remain in the ADAPT sub-state for the equalizer training for a duration of TADAPT • The M-RX signals exit from the ADAPT sub-state by flipping the ADAPT_Control field of RX_ADAPT_Control from ADAPT to SYNC and returning to STALL. 10 Teledyne LeCroy
- 11. © 2017 MIPI Alliance, Inc. MIPI UniPro 1.80 • New Link Startup Sequence • PACP Changes • Burst and Deskew • Quality of Service • New Primitives • Deprecated Functions 11 Teledyne LeCroy
- 12. © 2017 MIPI Alliance, Inc. Changes to Link Startup • Terminating a Link Startup • A UniPro Link Startup Sequence shall be aborted without reporting PA_LM_LINKSTARTUP.cnf_L(FAILURE) to the DME by either of the following conditions: – Local Application setting Power Mode to Hibernate_Mode or Off_Mode – Local Assertion of UniPro Cold Reset or UniPro Warm Reset • Error Processing during Link Startup • During Link Startup, the PA layer can only advance the Link Startup Phase – even when receiving errors on the incoming Link. • The PA Receiver should advance from Phase 0, Phase 1 or Phase 3 upon receipt of the correct TRG Symbols • The PA Receiver should ignore errors received during Phase 0 through Phase 4. • A PA_LM_LINKSTARTUP.cnf_L(FAILURE) should only be generated from a timeout. • HIBERN8 immediately after PA_LM_LINKSTARTUP.cnf_L(FAILURE), to prepare for a new Link Startup 1792 attempt from the local DME or the peer Device. 12 Teledyne LeCroy
- 13. © 2017 MIPI Alliance, Inc. PACP Changes • Gear 4 – PACP_PWR-REQ/CNF • Added value of 4 in the TX/RXGear field • Adapt – PACP_PWR-REQ/CNF • This field indicates the presence of ADAPT and type of ADAPT range (Fine or Course) selected for the current Power Mode Change • PACP_CAP_ind – MaxHS • This field shall be ignored by the PA receiver if PACP_CAP_EXT2_ind is received. • Instead, the MaxHS field of PACP_CAP_EXT2_ind shall be used. • If TX_HSGEAR_Capability is returned with value 4 or above, the PA transmitter shall set this field with value 2b’11 • In all other cases, the PA transmitter shall set this field with the value retrieved from TX_HSGEAR_Capability[1:0]. 13 Teledyne LeCroy
- 14. © 2017 MIPI Alliance, Inc. PACP Changes • PACP_CAP_EXT2_ind – The PACP_CAP_EXT2_ind frame is new – It supports all new capabilities introduced in M-PHY specification revision 4.0 onwards. – It is used in phase 5 of Link Startup Sequence before the PACP_CAP_EXT1_ind to notify the peer PA Layer of the local M-TX, M-RX, and PA Layer capabilities – Legacy Devices prior to UniPro version 1.8 not being able to recognize PACP_CAP_EXT2_ind shall – discard the reception of those PACP frames and proceed to PACP_CAP_EXT1_ind or PACP_CAP_ind – The frame’s fields are as follows • MaxHS: Maximum HS gear, or zero if HS mode is unavailable – This field overrides the field with the same name that is found in PACP_CAP_ind frame. • RxHsG4SyncLength: M-PHY timing information • RxHsG4PrepareLength: M-PHY timing information • RxHsAdaptInitial: M-PHY timing information • RxHsAdaptRefresh: M-PHY timing information – Unsupported or non-existing M-PHY capability attributes are reported with every bit set to '1'. 14 Teledyne LeCroy
- 15. © 2017 MIPI Alliance, Inc. Power Mode Changes • With MIPI UniPro Version 1.8 Only • Local PA Layer sends a PACP_PWR_req frame • When the remote PA Layer receives a valid PACP_PWR_req frame • The remote PA Layer shall send the PACP_PWR_cnf frame. • The local PA Layer receives a valid PACP_PWR_cnf frame • It checks the Status field. – If the Status field contains PWR_OK, PAPowerModeUserData is passed to the local DME. • The local PHY Layer wil be configured with the requested parameters. • The local PA Layer shall close the burst on the outbound Link. • The remote PA Layer shall close the burst on the other Link when detecting the end of burst on its inbound Link. 15 Teledyne LeCroy
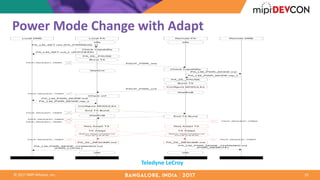
- 16. © 2017 MIPI Alliance, Inc. Power Mode Change with Adapt 16 Teledyne LeCroy Local PA Remote PA PA_LM_SET.req (PA_PWRMode, x) PA_LM_SET.cnf_L (SUCCESS) PACP_PWR_req Idle Idle WaitCnf Configure MODULEs PACP_PWR_cnf WaitEoB Burst TX Burst TX Check cnf Configure MODULEs PACP_REQUEST_TIMER PACP_REQUEST_TIMER WaitEoB PA_DL_RESUME.indPA_DL_RESUME.ind Idle Idle PA_LM_PWR_MODE_CHANGED.ind (PWR_LOCAL) Check Capability Check Capability End TX Burst End TX Burst Remote DMELocal DME PACP_REQUEST_TIMER PACP_REQUEST_TIMER PA_DL_PAUSE PA_DL_PAUSE PA_LM_PWR_MODE.ind PA_LM_PWR_MODE.rsp_L PA_LM_PWR_MODE.ind PA_LM_PWR_MODE.rsp_L PA_LM_PWR_MODE_CHANGED.ind (PWR_REMOTE) TX Adapt Req Adapt TX PACP_REQUEST_TIMER PACP_REQUEST_TIMER PACP_REQUEST_TIMER PACP_REQUEST_TIMER Wait for Adapt Complete Ind from M-TX & M-RX Wait for Adapt Complete Ind from M-TX & M-RX Req Adapt TX TX Adapt
- 17. © 2017 MIPI Alliance, Inc. Burst Start and Deskew Pattern Burst Start and Deskew Pattern • An M-PHY burst shall begin by transmitting a deskew pattern <MK0, MK1>, • MK0 functions as an Start of Burst HEAD-OF-BURST marker. • The deskew pattern is also used when resynchronizing Lanes • The deskew pattern shall be transmitted simultaneously on all active Lanes. • The deskew pattern may be transmitted at any point in time for the purpose of potential error recovery • Dummy Burst • A dummy burst is an M-PHY burst that is sent on inactive M-PHY Lanes in a Multi-Lane scenario during Link configuration. • A dummy burst is to synchronize the M-PHY Lane attributes across both, inactive and activated Lanes • A dummy burst does not carry any payload and is not used in Lane distribution • A dummy burst is issued only on Lanes with a logical Lane number greater than 0. • The dummy burst shall begin by transmitting a special pattern <MK0, FLR>, which distinguishes the dummy burst from a normal burst. During the dummy burst, the PA Layer shall send only FILLERs. 17 Teledyne LeCroy
- 18. © 2017 MIPI Alliance, Inc. New Primitives – PA_INIT.ind • Informs the DL Layer that there was a PA_INIT requested by the Peer PA Layer. The DL Layer should notify the DME – PA_LM_RX_SYMBOL_CNT.ind • PA Layer generates this primitive every time it receives 1024 Symbols between the Head of Burst and the End of Burst – PA_LM_TX_SYMBOL_CNT.ind • PA Layer generates this primitive every time it transmits 1024 symbols between between HoB and EoB – M-LANE-AdaptStart – M-LANE-AdaptComplete – M-LANE-MRXSaveState – M-LANE-AdaptComplete 18 Teledyne LeCroy
- 19. © 2017 MIPI Alliance, Inc. MIPI UniPro Deprecated Functions in 1.80 • T-MPI: T-MPI avoids excessive pin-counts by utilizing high-speed SERDES technologies found in modern FPGAs. • LCC: LINE Control Command (LCC) • Basic Optical Media Converters are supported as optional • Advanced Optical Media Converters are not supported as options. – UniPro does not mandate the implementation of the M-PHY state LINE-CFG, nor does UniPro make use of the LINE-CFG state, should it be part of the M-PHY implementation. • UniPro specification Version 1.80 gives up backward compatibility to UniPro Versions v1.41.00 and earlier. Specifically due to deprecation of LCC 19 Teledyne LeCroy
- 20. © 2017 MIPI Alliance, Inc. UFS • General Features – Target performance – High speed GEARs • Support for GEAR1 is mandatory • Support for GEAR2 is mandatory • Support for GEAR3 is optional • Support for GEAR4 is mandatory 20 Teledyne LeCroy
- 22. © 2017 MIPI Alliance, Inc. UFS HS Burst • UFS HS Burst – A UFS device shall support the HS-GEAR1, HS-GEAR2 and the HS-GEAR4. – Support for HS-GEAR3 is optional. • This violates the M-PHY spec which states that all lower gears must be supported. – SUBLINKS in a LINK may communicate with different HS-GEAR or PWM-GEAR. • HS Prepare Length Control – The TX_HS_PREPARE_LENGTH M-PHY configuration attribute defines the time to move from STALL to HS-BURST. At reset, M-TX sets TX_HS_PREPARE_LENGTH = 15. • HS Sync Length Control – The TX_HS_SYNC_LENGTH M-PHY configuration attribute defines the number of synchronization symbols before a HS Burst. – In the UFS interface the synchronization sequence shall be generated by the M-TX. – Support for protocol controlled synchronization is optional. – M-TX starts at reset with TX_HS_SYNC_LENGTH = 15, in COARSE type. 22 Teledyne LeCroy
- 23. © 2017 MIPI Alliance, Inc. • PWM Burst • A UFS device shall support the PWM-G1 (default, mandated by [M-PHY]), PWM-G2, PWM-G3 and PWM-G4 GEARS. • The PWM-G5, PWM-G6 and PWM-G7 are optional. – Even if the physical layer supports PWM-G0, this gear can not be used because it is not supported by UniPro • The PWM-G1 is the active gear by default after power up or reset. • SUBLINKS in a LINK may communicate with different PWM-GEAR or HS-GEAR. • LS Prepare Length Control • The TX_LS_PREPARE_LENGTH M-PHY configuration attribute defines the time to move from SLEEP to PWM-BURST. • At reset, M-TX sets TX_LS_PREPARE_LENGTH = 10. 23 Teledyne LeCroy